目标检测-YOLOv3
YOLOv3介绍
YOLOv3 (You Only Look Once, Version 3) 是 YOLO 系列目标检测模型的第三个版本,相较于 YOLOv2 有了显著的改进和增强,尤其在检测速度和精度上表现优异。YOLOv3 的设计目标是在保持高速的前提下提升检测的准确性和稳定性。下面是对 YOLOv3 改进和优势的介绍,以及 YOLOv3 核心部分的代码展示。
相比 YOLOv2 的改进与优势
-
多尺度特征金字塔
YOLOv3 引入了 FPN(Feature Pyramid Networks),即在三个不同尺度上进行预测,从而提高了小目标的检测效果。YOLOv2 只是在最后的输出层做预测,而 YOLOv3 则在网络的多个层级上进行预测,以保证不同尺度的目标都能被检测到。 -
残差网络(Residual Connections)
YOLOv3 采用了 ResNet 中的残差连接(ResNet residual connections)来构建其网络结构,改进了网络的深度,使得模型可以更好地学习复杂的特征,而不会遇到深度网络中的梯度消失问题。 -
新的分类损失函数
YOLOv3 使用了基于 sigmoid 的分类损失函数,取代了 YOLOv2 的 softmax 函数。这使得 YOLOv3 能够更好地应对多标签分类问题,并提高了分类精度。 -
更多的 anchor boxes
YOLOv3 引入了更多的 anchor boxes,以适应更为复杂的目标和场景。YOLOv2 只用了 5 个 anchor boxes,而 YOLOv3 则增加到了 9 个,从而能更好地捕捉到目标的形状和大小变化。 -
Darknet-53 作为 Backbone
YOLOv3 使用了 Darknet-53 作为其 backbone 网络。这是一个由 53 层卷积层组成的深度网络,较 YOLOv2 的 Darknet-19 网络更深,并且在计算效率和准确率上实现了较好的平衡。
核心代码展示
以下是 YOLOv3 核心部分的简化代码展示,主要展示如何使用 Darknet-53 作为主干网络,如何进行多尺度预测。
import torch
import torch.nn as nnclass YOLOv3(nn.Module):def __init__(self, num_classes):super(YOLOv3, self).__init__()self.num_classes = num_classesself.backbone = Darknet53()self.head = YOLOHead(num_classes)def forward(self, x):# 从 Darknet-53 提取多尺度特征features_52x52, features_26x26, features_13x13 = self.backbone(x)# 在三个尺度上进行预测yolo_output_52x52 = self.head(features_52x52)yolo_output_26x26 = self.head(features_26x26)yolo_output_13x13 = self.head(features_13x13)return [yolo_output_52x52, yolo_output_26x26, yolo_output_13x13]class Darknet53(nn.Module):def __init__(self):super(Darknet53, self).__init__()# 构建 53 层的卷积网络self.layers = self._make_layers()def _make_layers(self):layers = []# 这里可以根据具体的 Darknet-53 结构构建每一层return nn.Sequential(*layers)def forward(self, x):# 分别输出 52x52, 26x26 和 13x13 的特征图out_52x52 = ...out_26x26 = ...out_13x13 = ...return out_52x52, out_26x26, out_13x13class YOLOHead(nn.Module):def __init__(self, num_classes):super(YOLOHead, self).__init__()self.num_classes = num_classes# 定义 YOLO head 的网络结构,包括分类和回归任务def forward(self, x):# 根据输入的特征图进行分类和位置预测return ...好的,以下是一个更加详细的 YOLOv3 实现示例,涵盖了其核心部分,包括主干网络 (Darknet-53)、特征提取、3 个尺度上的预测模块,以及 YOLO 检测头部的详细实现。
详细的代码实现
import torch
import torch.nn as nn# 1. 卷积块,包含卷积、BN 和 Leaky ReLU
class ConvBlock(nn.Module):def __init__(self, in_channels, out_channels, kernel_size, stride, padding):super(ConvBlock, self).__init__()self.conv = nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding, bias=False)self.bn = nn.BatchNorm2d(out_channels)self.leaky_relu = nn.LeakyReLU(0.1)def forward(self, x):return self.leaky_relu(self.bn(self.conv(x)))# 2. 残差块(Residual Block)
class ResidualBlock(nn.Module):def __init__(self, in_channels):super(ResidualBlock, self).__init__()self.conv1 = ConvBlock(in_channels, in_channels // 2, 1, 1, 0) # 1x1 卷积self.conv2 = ConvBlock(in_channels // 2, in_channels, 3, 1, 1) # 3x3 卷积def forward(self, x):return x + self.conv2(self.conv1(x)) # 残差连接# 3. Darknet-53 Backbone
class Darknet53(nn.Module):def __init__(self):super(Darknet53, self).__init__()self.layers = nn.Sequential(ConvBlock(3, 32, 3, 1, 1), # 输入是 RGB 图像,通道数为 3ConvBlock(32, 64, 3, 2, 1),ResidualBlock(64),ConvBlock(64, 128, 3, 2, 1),self._make_residual_layers(128, 2), # 两个残差块ConvBlock(128, 256, 3, 2, 1),self._make_residual_layers(256, 8), # 8 个残差块ConvBlock(256, 512, 3, 2, 1),self._make_residual_layers(512, 8), # 8 个残差块ConvBlock(512, 1024, 3, 2, 1),self._make_residual_layers(1024, 4) # 4 个残差块)def _make_residual_layers(self, in_channels, num_blocks):layers = []for _ in range(num_blocks):layers.append(ResidualBlock(in_channels))return nn.Sequential(*layers)def forward(self, x):# 返回不同尺度的特征图out_52x52 = self.layers[:6](x) # 尺度 52x52 的特征图out_26x26 = self.layers[6:8](out_52x52) # 尺度 26x26 的特征图out_13x13 = self.layers[8:](out_26x26) # 尺度 13x13 的特征图return out_52x52, out_26x26, out_13x13# 4. YOLOv3 Head,预测分类与边界框
class YOLOHead(nn.Module):def __init__(self, in_channels, num_classes):super(YOLOHead, self).__init__()self.num_classes = num_classes# 卷积层,用于对特征图进行进一步处理self.conv1 = ConvBlock(in_channels, in_channels * 2, 3, 1, 1)self.conv2 = nn.Conv2d(in_channels * 2, 3 * (num_classes + 5), 1, 1, 0) # 输出通道为 3*(num_classes + 5)def forward(self, x):x = self.conv1(x)x = self.conv2(x)return x.view(x.size(0), 3, self.num_classes + 5, x.size(2), x.size(3)) # 调整输出形状 (batch_size, 3, num_classes + 5, h, w)# 5. YOLOv3 完整模型
class YOLOv3(nn.Module):def __init__(self, num_classes):super(YOLOv3, self).__init__()self.num_classes = num_classes# Darknet-53 Backboneself.backbone = Darknet53()# YOLO 检测头,分别在 3 个不同的尺度上进行预测self.yolo_head_52x52 = YOLOHead(256, num_classes) # 小目标self.yolo_head_26x26 = YOLOHead(512, num_classes) # 中目标self.yolo_head_13x13 = YOLOHead(1024, num_classes) # 大目标def forward(self, x):# 从主干网络中获取多尺度特征图out_52x52, out_26x26, out_13x13 = self.backbone(x)# 分别在 52x52, 26x26 和 13x13 尺度上进行 YOLO 预测yolo_output_52x52 = self.yolo_head_52x52(out_52x52)yolo_output_26x26 = self.yolo_head_26x26(out_26x26)yolo_output_13x13 = self.yolo_head_13x13(out_13x13)return [yolo_output_52x52, yolo_output_26x26, yolo_output_13x13]# 6. 预测结果解码函数 (非必须, 在推理阶段需要用到)
def decode_yolo_output(output, anchors, num_classes, input_size):batch_size, num_anchors, grid_size, _ = output.size(0), output.size(1), output.size(2), output.size(3)# 进一步解码预测结果,转换为实际坐标和类别# 这个部分会涉及到 anchors、sigmoid 函数等细节return decoded_predictions
代码解释
-
ConvBlock 和 ResidualBlock
ConvBlock定义了 YOLOv3 使用的卷积模块,包含卷积、Batch Normalization 和 Leaky ReLU 激活函数。ResidualBlock是 YOLOv3 中的残差模块,通过残差连接,能够缓解梯度消失问题。
-
Darknet-53 Backbone
Darknet53是 YOLOv3 的主干网络,借鉴了 ResNet 中的残差块,网络总共有 53 层卷积层,能够高效提取特征。
-
YOLOHead
YOLOHead是 YOLOv3 在三个不同尺度上进行预测的头部网络,最终的卷积层输出的通道数是3 * (num_classes + 5),其中3是因为每个尺度对应 3 个 anchor,num_classes + 5包含类别 (num_classes)、置信度 (1) 和边界框参数 (4)。
-
YOLOv3 网络整体结构
YOLOv3结合了主干网络和三个 YOLO 预测头部,分别在 13x13、26x26 和 52x52 尺度上进行目标检测。
结论
YOLOv3 相较于 YOLOv2 主要通过改进网络架构、引入多尺度预测和使用残差连接等方法,提高了目标检测任务中的精度和效率。它的多尺度特征金字塔设计尤其适用于检测小目标,同时新采用的 Darknet-53 网络提供了强大的特征提取能力。
这一设计使得 YOLOv3 依然能在实时检测中保持良好的性能。
相关文章:

目标检测-YOLOv3
YOLOv3介绍 YOLOv3 (You Only Look Once, Version 3) 是 YOLO 系列目标检测模型的第三个版本,相较于 YOLOv2 有了显著的改进和增强,尤其在检测速度和精度上表现优异。YOLOv3 的设计目标是在保持高速的前提下提升检测的准确性和稳定性。下面是对 YOLOv3 …...

vscode好用的快捷键整理~
vscode好用的快捷键 将当前行复制并插入到上一行 shift alt ↑将当前行复制并插入到上一行 shift alt ↓将光标复制到上一行 ctrl alt ↑将光标复制到下一行 ctrl alt ↓删除当前行 ctrl x 本身是剪切当前行,也可以作为删除当前行来用选中下一个相同的片段…...

Docker in Docker 实践 on mac
在尝试tekton构建ci pipeline是,需要在k8 pod里build image,于是研究了如何docker in docker。 1. 编写自己的dind docker image FROM docker:20.10.16-dind ENV DOCKER_HOST unix:///var/run/docker.sock 2. docker build 自己的dind docker image并…...

Flask-Session扩展,使用Redis存储会话数据
深入理解Flask-session扩展Redis Flask 应用中使用 flask-session 扩展将 session 数据存储在 Redis 中是一种高效且可扩展的方法,特别是在需要处理大量用户或需要分布式部署的应用中。以下是如何在 Flask 应用中配置 flask-session 以使用 Redis 存储 session 的步…...

urdf ( xacro ) 的 collision碰撞参数设置
目录 写在前面的话整体流程1 URDF 文件结构2 查看原始碰撞形状描述3 加入简单碰撞形状描述方法一 Meshlab 自动测量方法二 人为测量 4 加入XACRO函数简化描述 最终结果展示侧视图正视图碰撞几何体中心点设置不对出现的结果 写在前面的话 本文使用的 URDF 文件是由 solidworks …...

iOS——方法交换Method Swizzing
什么是方法交换 Method Swizzing是发生在运行时的,主要用于在运行时将两个Method进行交换,我们可以将Method Swizzling代码写到任何地方,但是只有在这段Method Swilzzling代码执行完毕之后互换才起作用。 利用Objective-C Runtimee的动态绑定…...

【有啥问啥】大模型应用中的哈希链推理任务
大模型应用中的哈希链推理任务 随着人工智能技术的快速发展,尤其是大模型(如GPT、BERT、Vision Transformer等)的广泛应用,确保数据处理和模型推理的透明性与安全性变得愈发重要。哈希链推理任务作为一种技术手段,能够…...
DevExpress WinForms v24.1新版亮点:功能区、数据编辑器全新升级
DevExpress WinForms拥有180组件和UI库,能为Windows Forms平台创建具有影响力的业务解决方案。DevExpress WinForms能完美构建流畅、美观且易于使用的应用程序,无论是Office风格的界面,还是分析处理大批量的业务数据,它都能轻松胜…...

FreeRTOS内部机制学习01(任务创建的细节以及任务调度的内部机制)
文章目录 前言:首先要谢谢韦东山老师的无私奉献,让我学到了很多东西,我做这个笔记是害怕我会忘记,所以就记录了下来,希望对大家有帮助!关于寄存器CPU内部的寄存器这些寄存器到底要保存一些什么?…...
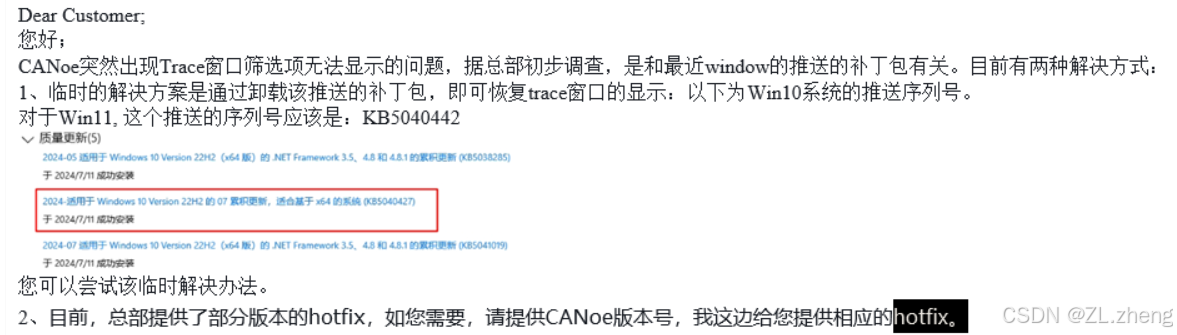
CANoe突然出现Trace窗口筛选项无法显示的问题
原因:和最近window的推送的补丁包有关 同事通过网上的操作,一顿操作猛如虎,卸载掉了这个插件,结果电脑文件夹无法打开和闪退。 IT的同事通过cmd命令也无法恢复。 dism /online /cleanup-image /scanhealth dism /online /cleanu…...

Linux日志-sar日志
作者介绍:简历上没有一个精通的运维工程师。希望大家多多关注作者,下面的思维导图也是预计更新的内容和当前进度(不定时更新)。 Linux 系统中的日志是记录系统活动和事件的重要工具,它们可以帮助管理员监视系统状态、调查问题以及了解系统运行…...

全国计算机二级考试C语言篇3——选择题
C语言部分——C语言概述 1.程序模块化的优点 程序模块化的优点在于它可以使程序的开发、维护和复用变得更简单。下面是一些主要的优点: 降低复杂度:模块化可以将复杂的问题分解成更小的、更易管理的部分。 可维护性:模块化使得代码更易于维护…...

Python实现混合蛙跳算法
博客目录 引言 什么是混合蛙跳算法(Shuffled Frog Leaping Algorithm, SFLA)?混合蛙跳算法的应用场景为什么使用混合蛙跳算法? 混合蛙跳算法的原理 混合蛙跳算法的基本概念蛙群分组与局部搜索全局混洗与更新混合蛙跳算法的流程 …...

印度再现超级大片,豪华阵容加顶级特效
最近,印度影坛再次掀起了风潮,一部名为《毗湿奴降临》的神话大片强势登陆各大影院,上映首周票房就飙升至105亿卢比,成功占据了票房榜首的位置。之后,这部电影也在北美上映,海外市场的表现同样不俗ÿ…...

Git使用经验总结6-删除远端历史记录
删除远端的历史记录但是不影响最新的仓库内容是笔者一直想实现的功能,有两个很不错的用处: 有的历史提交不慎包含了比较敏感的信息,提交的时候没注意,过了一段时间才发现。这个时候已经有了很多新的历史提交,无法再回…...
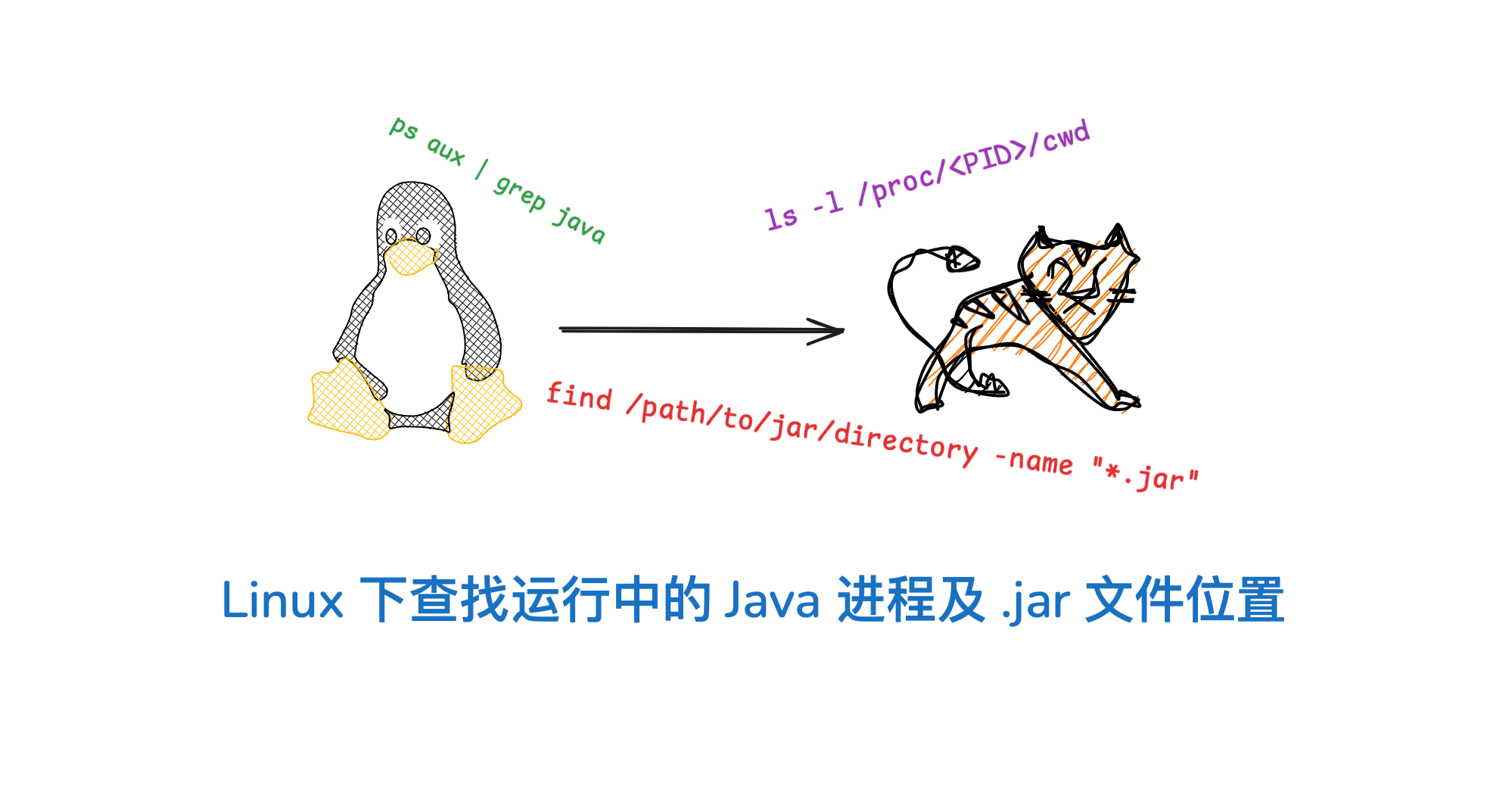
Linux 下查找运行中的 Java 进程及 .jar 文件位置
在 Linux 环境中,有时我们需要查找正在运行的 Java 进程以及它们对应的 .jar 文件位置。本文将介绍如何使用命令行工具来实现这一目标。 前言 在 Linux 系统中,我们经常需要监控正在运行的应用程序,特别是在出现问题时,了解应用程…...

Openwrt 安装 AX210 无线网卡
安装 TTYD 我安装的是官方原版的 Openwrt,首先需要安装 YYTD 来从网页控制 Openwrt。 安装驱动 参考这个链接,跟着做。 iwlwifi-firmware-ax210 不要直接拷贝粘贴,CSDN 复制文字最后面有网站添加的信息。 lspci opkg update opkg instal…...

在VitePress中进行页面链接:最佳实践与实例
在使用VitePress构建静态网站时,页面之间的链接是必不可少的。本文将介绍如何在VitePress中正确链接页面,包括内部页面和外部非VitePress页面的链接方法,并通过实例代码进行详细解释。 一、链接VitePress内部页面 在VitePress中,…...

Qt/C++百度地图/高德地图/天地图/腾讯地图/谷歌地图/加载绘图工具栏
一、前言说明 在地图中提供一个绘图工具栏,可以便捷的在地图上添加各种覆盖物,比如折线、多边形、矩形、圆形等,然后可以获取这些覆盖物的路径以及中心点等属性。这里有几个小插曲,比如百度地图gl版本默认不提供这个功能…...

Vue2 与 Vue3 的区别有哪些
Vue 2 和 Vue 3 在许多方面都有显著的区别,包括性能、API 设计、功能特性等。以下是它们主要的区别: 1. 响应式系统 Vue 2: 基于 Object.defineProperty: Vue 2 使用 Object.defineProperty 来实现响应式数据。这种方法在处理对象属性时有一定的局限性…...

Claude Code 之父:2026 年我一行代码都没写,编程已被 AI 解决
2026 年,你还在一行一行敲代码吗?Claude Code 的创造者、Anthropic 核心人物 Boris Cherny,在公开访谈里抛出一句让整个行业震动的话:2026 年到现在,我没有写过一行代码。所有开发工作,100% 交给 AI 代理完…...

③ AI副业第一步:如何找到适合自己的AI赚钱赛道
③ AI副业第一步:如何找到适合自己的AI赚钱赛道选对赛道,努力才有意义。选错赛道,越努力离钱越远。前言:为什么大多数人AI副业做不起来? 我观察了100想做AI副业的人,失败的原因高度一致: 失败路…...

零基础轻松拿捏!魔珐星云青少年健康运动教学数字人搭建全流程指南
大家好!本次给大家分享一款面向青少年体育教育的AI创意实践项目——青少年健康运动教学智能数字交互系统。本项目聚焦青少年体质健康痛点,围绕体育教学智能化升级需求,打造集健康知识教学、运动动作陪练、健康知识考核、运动能力评测于一体的…...

亚马逊 Rufus 关停,Alexa 正式上线:卖家必须读懂的6条新规则
2026年5月13日,亚马逊官方正式宣布,下线Rufus,推出全新AI购物助手:Alexa for Shopping。但是,这不是粗暴地直接下线 Rufus,而是一次购物AI底层架构的重组 —— 将 Rufus 的商品专长 与 Alexa的用户理解力&a…...

3步深度解锁:网络设备权限管理工具的实战手册
3步深度解锁:网络设备权限管理工具的实战手册 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 你是否曾面对功能受限的网络设备感到束手无策?当默认配置锁死了硬…...

解决Claude Code Token不足问题并享受Taotoken活动价
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决Claude Code Token不足问题并享受Taotoken活动价 应用场景类,聚焦于使用Claude Code时遇到Token配额紧张的开发者&…...

2026论文降AI怎么挑?亲测好用工具附免费降AI指南
“您的论文AIGC率为42%,超出学校30%的合格线,请修改后重新提交。”赶毕业论文的同学这段时间估计没少收到这样的提醒。2026年知网、万方、维普等主流平台的AI检测算法持续迭代,把AI生成内容改到符合学校要求,已经成了毕业生的刚需…...

2027考研全套资料免费分享
备战27考研最全备考资料整理完毕,一路走来深知备考搜集资料耗费大量时间,浪费不少精力。特意整理2027考研全科完整版资源,全部打包汇总,零基础考生直接拿来就能使用,省去四处搜集资料的烦恼。资料内含:&…...

打造XBEE封装BLE112蓝牙模块:硬件设计、射频布局与调试全攻略
1. 项目概述:为什么我们需要一个“XBEE格式”的蓝牙模块?在嵌入式开发和物联网项目中,无线通信模块的选择往往决定了项目的成败。对于很多工程师和创客来说,Silicon Labs(芯科科技)的BLE112/113模块是蓝牙4…...

BetterJoy终极指南:3分钟让你的Switch手柄变身PC游戏神器
BetterJoy终极指南:3分钟让你的Switch手柄变身PC游戏神器 【免费下载链接】BetterJoy Allows the Nintendo Switch Pro Controller, Joycons and SNES controller to be used with CEMU, Citra, Dolphin, Yuzu and as generic XInput 项目地址: https://gitcode.c…...