PWM互补输出,以及死区时间计算
本文基于野火例程进行解说
实验内容
本次实验输出一对互补的pwm波,且进行死区时间的计算说明。
代码
互补输出对应的定时器初始化代码:
bsp_advance_tim.c
/********************************************************************************* @file bsp_advance_tim.c* @author STMicroelectronics* @version V1.0* @date 2015-xx-xx* @brief 高级控制定时器互补输出范例******************************************************************************* @attention** 实验平台:野火 STM32 F407 开发板 * 论坛 :http://www.firebbs.cn* 淘宝 :http://firestm32.taobao.com********************************************************************************/#include "./tim/bsp_advance_tim.h"TIM_HandleTypeDef TIM_TimeBaseStructure;
TIM_OC_InitTypeDef TIM_OCInitStructure;__IO uint16_t ChannelPulse = 500;/*** @brief 配置TIM复用输出PWM时用到的I/O* @param 无* @retval 无*/
static void TIMx_GPIO_Config(void)
{/*定义一个GPIO_InitTypeDef类型的结构体*/GPIO_InitTypeDef GPIO_InitStructure;/*开启定时器相关的GPIO外设时钟*/ADVANCE_OCPWM_GPIO_CLK_ENABLE();ADVANCE_OCNPWM_GPIO_CLK_ENABLE();ADVANCE_BKIN_GPIO_CLK_ENABLE(); /* 定时器功能引脚初始化 */ GPIO_InitStructure.Pin = ADVANCE_OCPWM_PIN; GPIO_InitStructure.Mode = GPIO_MODE_AF_PP; GPIO_InitStructure.Pull = GPIO_NOPULL;GPIO_InitStructure.Speed = GPIO_SPEED_HIGH; GPIO_InitStructure.Alternate = ADVANCE_OCPWM_AF;HAL_GPIO_Init(ADVANCE_OCPWM_GPIO_PORT, &GPIO_InitStructure); GPIO_InitStructure.Pin = ADVANCE_OCNPWM_PIN; GPIO_InitStructure.Alternate = ADVANCE_OCNPWM_AF; HAL_GPIO_Init(ADVANCE_OCNPWM_GPIO_PORT, &GPIO_InitStructure);GPIO_InitStructure.Pin = ADVANCE_BKIN_PIN; GPIO_InitStructure.Alternate = ADVANCE_BKIN_AF; HAL_GPIO_Init(ADVANCE_BKIN_GPIO_PORT, &GPIO_InitStructure);
}/** 注意:TIM_TimeBaseInitTypeDef结构体里面有5个成员,TIM6和TIM7的寄存器里面只有* TIM_Prescaler和TIM_Period,所以使用TIM6和TIM7的时候只需初始化这两个成员即可,* 另外三个成员是通用定时器和高级定时器才有.*-----------------------------------------------------------------------------* TIM_Prescaler 都有* TIM_CounterMode TIMx,x[6,7]没有,其他都有(基本定时器)* TIM_Period 都有* TIM_ClockDivision TIMx,x[6,7]没有,其他都有(基本定时器)* TIM_RepetitionCounter TIMx,x[1,8]才有(高级定时器)*-----------------------------------------------------------------------------*/
static void TIM_Mode_Config(void)
{TIM_BreakDeadTimeConfigTypeDef TIM_BDTRInitStructure;// 开启TIMx_CLK,x[1,8] ADVANCE_TIM_CLK_ENABLE(); /* 定义定时器的句柄即确定定时器寄存器的基地址*/TIM_TimeBaseStructure.Instance = ADVANCE_TIM;/* 累计 TIM_Period个后产生一个更新或者中断*/ //当定时器从0计数到999,即为1000次,为一个定时周期TIM_TimeBaseStructure.Init.Period = 1000-1;// 高级控制定时器时钟源TIMxCLK = HCLK=168MHz // 设定定时器频率为=TIMxCLK/(TIM_Prescaler+1)=1MHzTIM_TimeBaseStructure.Init.Prescaler = 168-1; // 采样时钟分频TIM_TimeBaseStructure.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1;// 计数方式TIM_TimeBaseStructure.Init.CounterMode=TIM_COUNTERMODE_UP;// 重复计数器TIM_TimeBaseStructure.Init.RepetitionCounter=0; // 初始化定时器TIMx, x[1,8]HAL_TIM_PWM_Init(&TIM_TimeBaseStructure);/*PWM模式配置*///配置为PWM模式1TIM_OCInitStructure.OCMode = TIM_OCMODE_PWM1;TIM_OCInitStructure.Pulse = ChannelPulse;TIM_OCInitStructure.OCPolarity = TIM_OCPOLARITY_HIGH;TIM_OCInitStructure.OCNPolarity = TIM_OCNPOLARITY_HIGH;TIM_OCInitStructure.OCIdleState = TIM_OCIDLESTATE_SET;TIM_OCInitStructure.OCNIdleState = TIM_OCNIDLESTATE_RESET;//初始化通道1输出PWM HAL_TIM_PWM_ConfigChannel(&TIM_TimeBaseStructure,&TIM_OCInitStructure,TIM_CHANNEL_1);/* 自动输出使能,断路、死区时间和锁定配置 */TIM_BDTRInitStructure.OffStateRunMode = TIM_OSSR_ENABLE;TIM_BDTRInitStructure.OffStateIDLEMode = TIM_OSSI_ENABLE;TIM_BDTRInitStructure.LockLevel = TIM_LOCKLEVEL_1;TIM_BDTRInitStructure.DeadTime = 0xff;TIM_BDTRInitStructure.BreakState = TIM_BREAK_ENABLE;TIM_BDTRInitStructure.BreakPolarity = TIM_BREAKPOLARITY_LOW;TIM_BDTRInitStructure.AutomaticOutput = TIM_AUTOMATICOUTPUT_ENABLE;HAL_TIMEx_ConfigBreakDeadTime(&TIM_TimeBaseStructure, &TIM_BDTRInitStructure);/* 定时器通道1输出PWM */HAL_TIM_PWM_Start(&TIM_TimeBaseStructure,TIM_CHANNEL_1);/* 定时器通道1互补输出PWM */HAL_TIMEx_PWMN_Start(&TIM_TimeBaseStructure,TIM_CHANNEL_1);
}/*** @brief 初始化高级控制定时器定时,1s产生一次中断* @param 无* @retval 无*/
void TIMx_Configuration(void)
{TIMx_GPIO_Config(); TIM_Mode_Config();
}/*********************************************END OF FILE**********************/
头文件:
bsp_advance_tim.h
#ifndef __ADVANCE_TIM_H
#define __ADVANCE_TIM_H#include "stm32f4xx.h"/* 定时器 */
#define ADVANCE_TIM TIM8
#define ADVANCE_TIM_CLK_ENABLE() __TIM8_CLK_ENABLE()/* TIM8通道1输出引脚 */
#define ADVANCE_OCPWM_PIN GPIO_PIN_6
#define ADVANCE_OCPWM_GPIO_PORT GPIOC
#define ADVANCE_OCPWM_GPIO_CLK_ENABLE() __GPIOC_CLK_ENABLE()
#define ADVANCE_OCPWM_AF GPIO_AF3_TIM8/* TIM8通道1互补输出引脚 */
#define ADVANCE_OCNPWM_PIN GPIO_PIN_5
#define ADVANCE_OCNPWM_GPIO_PORT GPIOA
#define ADVANCE_OCNPWM_GPIO_CLK_ENABLE() __GPIOA_CLK_ENABLE()
#define ADVANCE_OCNPWM_AF GPIO_AF3_TIM8/* TIM8断路输入引脚 */
#define ADVANCE_BKIN_PIN GPIO_PIN_6
#define ADVANCE_BKIN_GPIO_PORT GPIOA
#define ADVANCE_BKIN_GPIO_CLK_ENABLE() __GPIOA_CLK_ENABLE()
#define ADVANCE_BKIN_AF GPIO_AF3_TIM8extern TIM_HandleTypeDef TIM_TimeBaseStructure;void TIMx_Configuration(void);#endif /* __ADVANCE_TIM_H */
代码讲解
断路功能
//在初始化文件里这几句代码配置了断路功能的模式TIM_OCInitStructure.OCIdleState = TIM_OCIDLESTATE_SET;//当空闲状态下PWM通道置高电平
TIM_OCInitStructure.OCNIdleState = TIM_OCNIDLESTATE_RESET;//当空闲模状态下PWM互补通道置低电平
TIM_BDTRInitStructure.BreakState = TIM_BREAK_ENABLE;//开启断路功能
TIM_BDTRInitStructure.BreakPolarity = TIM_BREAKPOLARITY_LOW;//低电平断路
TIM_BDTRInitStructure.AutomaticOutput=TIM_AUTOMATICOUTPUT_ENABLE;//断路状态消失后,自动恢复输出
以上语句表示当断路功能对应的引脚输入变为低电平时,互补输出的功能就被禁止,此时变为空闲状态,而pwm对应的通道输出高电平,互补对应的通道变为低电平,而当断路功能对应的引脚变为高电平时,互补输出又再次出现。
死区时间计算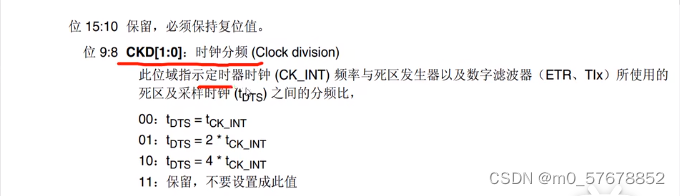
通过上面两张图,就可以知道死区时间的计算公式了
下面列举出配置死区时间的代码
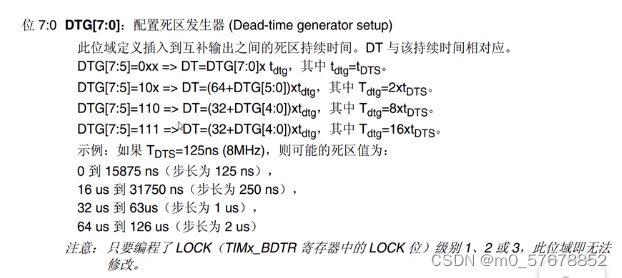
TIM_TimeBaseStructure.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1;//设置分频系数,详细看第一张图。TIM_BDTRInitStructure.DeadTime = 0xff;//配置死区时间,具体计算看第二章图开始计算,假设定时器的频率为165Mhz,且配置语句TIM_BDTRInitStructure.DeadTime = 0xff,则DTG[7:0]被写入11111111,则对应第四个计算方式,TIM_TimeBaseStructure.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1表示对定时器频率1分频,则此时tDTS=1*Tck_int = (1/165000000)s,此时代码计算公式
DT=(32+DTG[4:0])*Tdtg=(32+31)16(1/165000000)*1000000us=6us
相关文章:
PWM互补输出,以及死区时间计算
本文基于野火例程进行解说 实验内容 本次实验输出一对互补的pwm波,且进行死区时间的计算说明。 代码 互补输出对应的定时器初始化代码: bsp_advance_tim.c /********************************************************************************* fi…...

基于深度学习的海洋动物检测系统(Python+YOLOv5+清新界面)
摘要:基于深度学习的海洋动物检测系统使用深度学习技术检测常见海洋动物,识别图片、视频和实时视频中的海洋动物,方便记录、展示和保存结果。本文详细介绍海洋动物检测系统,在介绍算法原理的同时,给出Python的实现代码…...

C# 计算方差
50,100,100,60,50 计算他们的方差 为了计算这些数的方差,需要进行以下步骤: 1. 计算平均值,即将这些数相加,然后除以它们的数量。 平均值 (50 100 100 60 50) / 5 72 2. 计…...

HJZS电源监视继电器HJZS-E202 AC220V
系列型号: HJZS-E202断电延时继电器 HJZS-E002断电延时继电器 一 应用 HJZS-E202电源监视继电器用于直流或交流操作的各种保护和自动控制的装置中,用以增加触点数量。 二 安装结构 导轨安装9壳体结构,具体尺寸参阅外型尺寸图。 三 产品型号…...
dolphinscheduler 2.0.6 资源中心改造方案二:通过NFS挂载共享目录
目录调度资源中心存储概要安装NFS服务器客户端调度验证关闭SFTP开关(可忽略)重新上传资源文件worker执行任务验证服务器woker客户端worker其它nfs共享目录的配置文件/etc/exports说明调度资源中心存储概要 针对现有的单机存储可以做哪些扩展?…...
基于集成学习的用户流失预测并利用shap进行特征解释
基于集成学习的用户流失预测并利用shap进行特征解释 小P:小H,如果我只想尽可能的提高准确率,有什么好的办法吗? 小H:优化数据、调参侠、集成学习都可以啊 小P:什么是集成学习啊,听起来就很厉害的…...

【Java版oj 】 day17杨辉三角形的变形、计算某字符出现次数
目录 一、杨辉三角形的变形 (1)原题再现 (2)问题分析 (3)完整代码 二、计算某字符出现次数 (1)原题再现 (2)问题分析 (3)完整代…...

智能驾驶芯片赛道混战:如何看待5类玩家的竞争格局?
智能驾驶芯片赛道,一直是业内关注的焦点。 高工智能汽车注意到,针对L0-L2,业内基本采用智能前视一体机(IFC)方案;要实现高速NOA、城市NOA等更为高阶的智驾功能等,则基本采用域控制器方案。从IF…...

vue antd table表格的增删改查(三)input输入框根据关键字模糊查询【后台管理系统 使用filter与indexOf嵌套】
vue antd table表格的增删改查(三)input输入框根据关键字查询【后台管理系统filter与indexOf嵌套】知识回调场景复现利用filter和indexOf方法实现模糊查询1.查询对象为单层的数组元素2.查询对象为多层的数组元素(两层为例)3.查询对…...

【计组】性能指标——速度
衡量计算机性能的指标之一——速度,是指计算机执行完所有指令所耗费时间的长短。 一、概念: 引出了如下概念:机器字长:指计算机一次能处理的二进制位数,也就是我们通常说的32位64位计算机中的位。 机器字长决定了计算…...

【PC自动化测试-4】inspect.exe 详解
1,inspect.exe图解" 检查 "窗口有几个主要部分:● 标题栏。 显示" 检查 HWND (窗口句柄) 。● 菜单栏。 提供对 检查功能 的访问权限。● 工具 栏。 提供对 检查功能 的访问权限。● 树视图。 将 UI 元素的层次结构呈现为树视图控件&…...

比肩ChatGPT的国产AI:文心一言——有话说
🔗 运行环境:chatGPT,文心一言 🚩 撰写作者:左手の明天 🥇 精选专栏:《python》 🔥 推荐专栏:《算法研究》 #### 防伪水印——左手の明天 #### 💗 大家好&am…...

【第13届蓝桥杯】C/C++组B组省赛题目+详解
A.九进制转十进制 题目描述 九进制正整数(2022)9转换成十进制等于多少? 解: 2*9^02*9^12*9^321814581478; B.顺子日期 题目描述 小明特别喜欢顺子。顺子指的就是连续的三个数字:123、456等。顺子日期指的就是在日期的yyyymmdd表示法中&a…...
STM32 KEI 调试新手注意事项
记录一下解决问题的经过:1,用STM32 cubeMX 生成的MKD工程,默认的代码优化级别是level3 , 这个级别 会把一些代码给优化掉,造成一些意想不到的结果,最直观的就是 被优化的语句不能打断点调试,当你打了断点 ,…...

Windows权限提升—令牌窃取、UAC提权、进程注入等提权
Windows权限提升—令牌窃取、UNC提权、进程注入等提权1. 前言2. at本地命令提权2.1. 适用范围2.2. 命令使用2.3. 操作步骤2.3.1. 模拟提权2.3.2. at配合msf提权2.3.2.1. 生成木马文件2.3.2.2. 设置监听2.3.2.3. 设置反弹2.3.2.4. 查看反弹效果3. sc本地命令提权3.1. 适用范围3.…...

不做孔乙己也不做骆驼祥子
对教书育人的探讨前言一、为什么要“育人”1.育人为先2.育人是快乐的二、怎么“育人”前言 借着本次师德师风建设的主题,跟各位老师谈一谈对于“育人”的一些观点,和教育的一些看法。本文仅代表自己的观点,有不到位的地方,大家可以…...
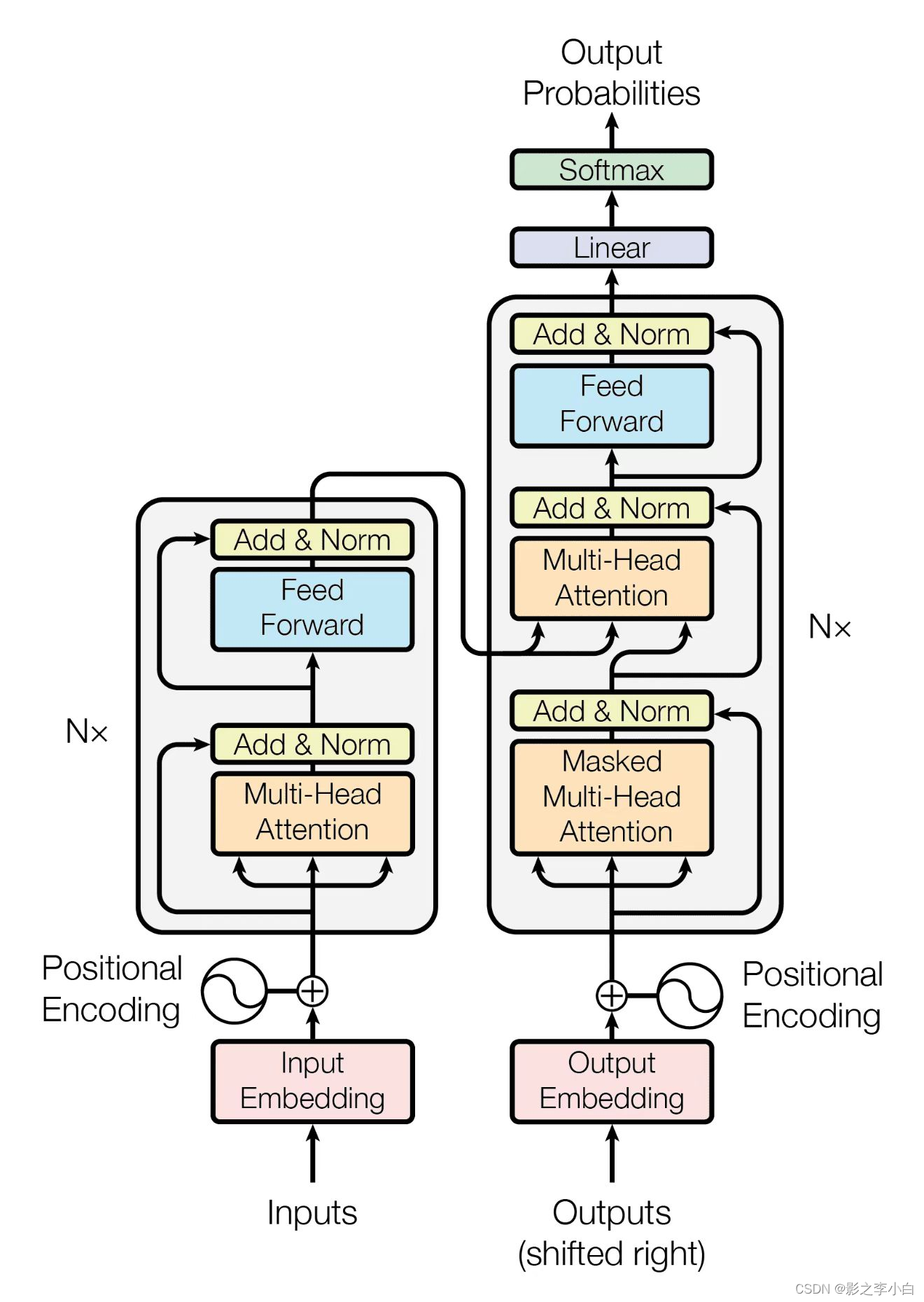
ChatGPT原理解析
文章目录Transformer模型结构构成组件整体流程GPT预训练微调模型GPT2GPT3局限性GPT4相关论文Transformer Transformer,这是一种仅依赖于注意力机制而不使用循环或卷积的简单模型,它简单而有效,并且在性能方面表现出色。 在时序模型中&#…...

常用算法实现【必会】:sort/bfs/dfs
文章目录常用排序算法实现(Go版本)BFS 广度优先遍历,利用queueDFS 深度优先遍历,利用stack前序遍历(根 左 右)中序遍历(左根右)后序遍历(左 右 根)BFS/DFS 总…...

瑟瑟发抖吧——用了这款软件,我的开发效率提升了50%
一、前言 开发中,一直听到有人讨论是否需要重复造轮子,我觉得有能力的人,轮子得造。但是往往开发周期短,用轮子所节省的时间去更好的理解业务,应用到业务中,也能清晰发现轮子的利弊,一定意义上…...
笔记本只使用Linux是什么体验?
个人主页:董哥聊技术我是董哥,嵌入式领域新星创作者创作理念:专注分享高质量嵌入式文章,让大家读有所得!近期,也有朋友问我,笔记本只安装Linux怎么样,刚好我也借此来表达一下我的感受…...

STM32F746G-DISCO音频BSP详解:I2S+DMA+CS43L22驱动开发
1. 项目概述AUDIO_DISCO_F746NG是 STMicroelectronics 官方 STM32CubeF7 软件包中为STM32F746G-DISCO 探索套件提供的音频底层支持包(Board Support Package, BSP)核心类。该类并非独立音频处理库,而是面向硬件抽象层(HAL…...
)
若依框架实战:如何优雅地实现静态资源权限校验(附完整代码)
若依框架静态资源权限校验实战指南 在企业级应用开发中,静态资源的安全访问控制是一个常见需求。无论是小程序图片资源管理,还是企业内部文档权限控制,都需要确保只有授权用户才能访问特定资源。本文将深入探讨如何在若依(RuoYi)框架中实现静…...

RAG系统的需求分析
这个是一个基于私有知识库的智能对话平台,允许用户上传文档构建专属知识库,并通过自然语言交互的方式查询和获取知识。它结合了大语言模型和向量检索技术,让用户通过对话的形式与自己的知识库进行高效交互应用场景个人用户场景:学习助手&…...

BI 项目交付 SOP
...

告别重复编码:用Copaw结合快马平台,自动化生成你的常用工具模块
作为一名经常需要整理会议纪要的开发者,我一直在寻找能提升效率的工具。最近尝试用Copaw结合InsCode(快马)平台做了一个会议纪要自动生成器,效果出乎意料地好。整个过程几乎没写代码,却实现了核心功能,分享下具体实现思路…...

DeepSeek-Coder-V2-Lite-Instruct评估指标详解:代码准确率、效率与创新性
DeepSeek-Coder-V2-Lite-Instruct评估指标详解:代码准确率、效率与创新性 【免费下载链接】DeepSeek-Coder-V2-Lite-Instruct 开源代码智能利器——DeepSeek-Coder-V2,性能比肩GPT4-Turbo,全面支持338种编程语言,128K超长上下文&a…...

从Markdown到可执行规范:Tessl Framework初探与“规范即源代码”的实践思考
从Markdown到可执行规范:Tessl Framework初探与“规范即源代码”的实践思考 当代码行数不再是衡量开发效率的唯一标准,一种全新的编程范式正在悄然兴起。想象一下,开发者不再需要直接编写实现细节,而是专注于用结构化的自然语言描…...

从CNN到Mamba:为什么这个轻量级双分支结构在医学图像分类中表现更好?
从CNN到Mamba:轻量级双分支结构如何重塑医学图像分类范式 医学影像分析正面临前所未有的挑战——随着CT、MRI、超声等成像技术的普及,每天产生的医学图像数据呈指数级增长。传统CNN架构在应对高分辨率医学图像时,往往陷入局部特征提取的局限&…...

YOLO12模型与GitHub Actions结合:自动化测试与部署流水线
YOLO12模型与GitHub Actions结合:自动化测试与部署流水线 1. 引言 在目标检测项目的开发过程中,我们经常面临这样的挑战:每次修改代码后都需要手动运行测试、构建镜像、部署模型,这个过程既耗时又容易出错。特别是对于YOLO12这样…...

使用Alpine配置WSL ssh门户
1. 哑铃图是什么? 哑铃图(Dumbbell Plot),有时也称为DNA图或杠铃图,是一种用于比较两个相关数据点的可视化图表。 它源于人们对更有效数据比较方式的持续探索。 在传统的时间序列比较中,我们通常使用两条折…...