【嵌入式Linux学习笔记】基于Linux官方库的标准外设驱动
对于标准的外设如LED,KEY,PWM等,以及标准通信协议,Linux都自带有标准的驱动库,不需要我们自行编写,只需要配置好相应的GPIO属性和电气属性,即可匹配相应的驱动,在应用程序中直接使用相应的外设。
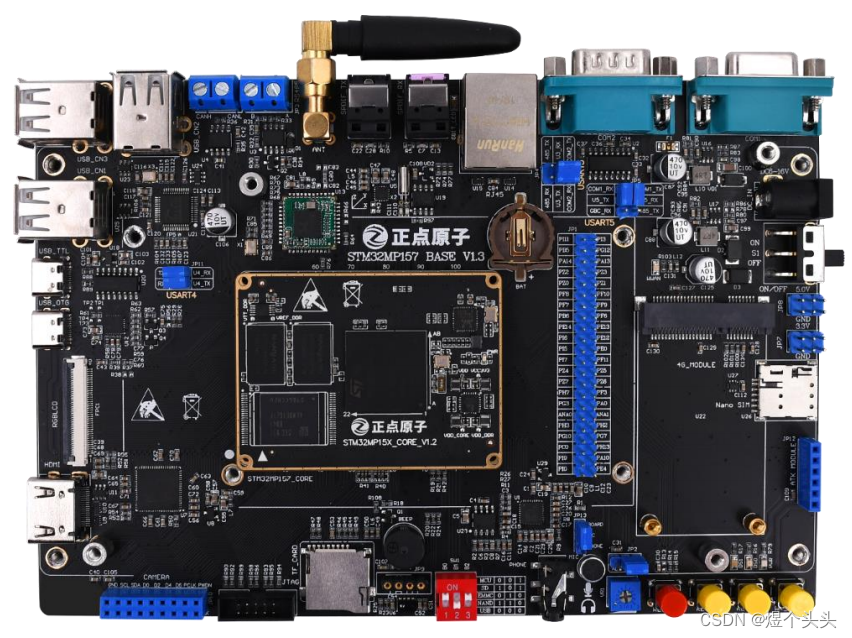
学习视频地址:【正点原子】STM32MP157开发板
驱动流程
- 使能Linux内核相关库,
make menuconfig - 编写GPIO电气属性,文件路径:
Linux内核路径/arch/arm/boot/dts/stm32mp15-pinctrl.dtsi - 添加设备树节点,匹配属性及驱动,文件路径:
Linux内核路径/arch/arm/boot/dts/stm32mp157d-atk.dts - 编写相应的应用程序或者直接命令行调用
LED
驱动使能


电气属性
/* gpio led config */
led_pins_a: gpioled-0 {pins {pinmux = <STM32_PINMUX('I', 0, GPIO)>, /* LED0 */<STM32_PINMUX('F', 3, GPIO)>; /* LED1 */drive-push-pull;bias-pull-up;output-high;slew-rate = <0>;};
};
设备树节点
gpio-leds{compatible = "gpio-leds";pinctrl-0 = <&led_pins_a>;led0 {label = "red";gpios = <&gpioi 0 GPIO_ACTIVE_LOW>;linux,default-trigger = "heartbeat";default-state = "on";};led1 {label = "green";gpios = <&gpiof 3 GPIO_ACTIVE_LOW>;default-state = "off";};};
应用指令
echo 1 > /sys/class/leds/red/brightness #打开 LED0
echo 0 > /sys/class/leds/red/brightness #关闭 LED0
KEY
驱动使能

电气属性
/* gpio key config */key_pins_a: key_pins-0 {pins1 {pinmux = <STM32_PINMUX('G', 3, GPIO)>, /* KEY0 */<STM32_PINMUX('H', 7, GPIO)>; /* KEY1 */bias-pull-up;slew-rate = <0>;};pins2 {pinmux = <STM32_PINMUX('A', 0, GPIO)>; /* WK_UP */bias-pull-down;slew-rate = <0>;};};
设备树节点
gpio-keys{compatible = "gpio-keys";pinctrl-names = "default";pinctrl-0 = <&key_pins_a>;autorepeat; /* 支持连按 */key0{label = "GPIO KEY L";linux,code = <KEY_L>;gpios = <&gpiog 3 GPIO_ACTIVE_LOW>;};key1{label = "GPIO KEY S";linux,code = <KEY_L>;gpios = <&gpioh 7 GPIO_ACTIVE_LOW>;};wkup{label = "GPIO KEY Enter";linux,code = <KEY_ENTER>;gpios = <&gpioa 0 GPIO_ACTIVE_HIGH>;gpio-key,wakeup;};
};
应用指令
hexdump /dev/input/event0 #查看按键事件的原始值
PWM
驱动使能

电气属性
/* pwm1 config */
pwm1_pins_a: pwm1-0 {pins {pinmux = <STM32_PINMUX('A', 10, AF1)>; /* TIM1_CH3 */bias-pull-down;drive-push-pull;slew-rate = <0>;};
};pwm1_sleep_pins_a: pwm1-sleep-0 {pins {pinmux = <STM32_PINMUX('A', 10, ANALOG)>; /* TIM1_CH3 */};
};
设备树节点
/* 官方文件中已有定时器节点,但是默认是失能的,所以需要在应用时追加定时器配置 */
&timers1 {status = "okay";/* spare all DMA channels since they are not needed for PWM output *//delete-property/dmas;/delete-property/dma-names;pwm1: pwm {pinctrl-0 = <&pwm1_pins_a>;pinctrl-1 = <&pwm1_sleep_pins_a>;pinctrl-names = "default", "sleep";#pwm-cells = <2>;status = "okay";};
};
检验
因为我们需要调用pwm下的pwmchipx来控制某路PWM,所以我们需要先确认pwmchipx是否对应我们使用的定时器timer。
cd pwmchip0
这时会打印出以下信息,我们需要匹配定时器的寄存器地址以及该pwm设备的寄存器地址。可以看到,地址都是44000000,说明这个pwm设备对应的定时器就是timer1。


应用指令
echo 2 > /sys/class/pwm/pwmchip0/export # 开启TIM1_CH3
echo 50000 > /sys/class/pwm/pwmchip0/pwm2/period # 设置周期值为50000ns
echo 10000 > /sys/class/pwm/pwmchip0/pwm2/duty_cycle # 设置一个周期值中高电平的时间,即间接设置占空比
echo 1 > /sys/class/pwm/pwmchip0/pwm2/enable # 使能PWM,需要设置好周期和占空比再使能,否则会报错
echo "inversed" > /sys/class/pwm/pwmchip0/pwm2/polarity #极性反转
echo "normal" > /sys/class/pwm/pwmchip0/pwm2/polarity #极性恢复
I2C
I2C子系统架构
 I2C适配器驱动SOC厂商已经写好了,所以我们只需要写I2C设备驱动即可。
I2C适配器驱动SOC厂商已经写好了,所以我们只需要写I2C设备驱动即可。
电气属性
i2c5_pins_a: i2c5-0 {pins {pinmux = <STM32_PINMUX('A', 11, AF4)>, /* I2C5_SCL */<STM32_PINMUX('A', 12, AF4)>; /* I2C5_SDA */bias-disable;drive-open-drain;slew-rate = <0>;};
};i2c5_pins_sleep_a: i2c5-1 {pins {pinmux = <STM32_PINMUX('A', 11, ANALOG)>, /* I2C5_SCL */<STM32_PINMUX('A', 12, ANALOG)>; /* I2C5_SDA */};
};
设备树节点
以正点原子STM32MP1开发板上的AP3216C传感器为例,它挂载在I2C5总线上。
&i2c5 {pinctrl-names = "default", "sleep";pinctrl-0 = <&i2c5_pins_a>;pinctrl-1 = <&i2c5_pins_sleep_a>;status = "okay";/* 1e代表器件地址 */ap3216c@1e {compatible = "alientek,ap3216c";reg = <0x1e>;};
};
驱动代码
下面的两个函数是i2c设备最主要的数据读写函数,设备的驱动就在这个基础上通过对不同寄存器的读写实现。i2c总线设备的操作与platform总线类似。
/** @description : 从ap3216c读取寄存器数据* @param - dev: ap3216c设备* @param - reg: 要读取的寄存器首地址* @param - val: 读取到的数据* @param - len: 要读取的数据长度* @return : 操作结果*/
static int ap3216c_read_regs(struct ap3216c_dev *dev, u8 reg, void *val, int len)
{int ret;struct i2c_msg msg[2];struct i2c_client *client = (struct i2c_client *)dev->client;/* msg[0]为发送要读取的首地址 */msg[0].addr = client->addr; /* ap3216c地址 */msg[0].flags = 0; /* 标记为发送数据 */msg[0].buf = ® /* 读取的首地址 */msg[0].len = 1; /* reg长度*//* msg[1]读取数据 */msg[1].addr = client->addr; /* ap3216c地址 */msg[1].flags = I2C_M_RD; /* 标记为读取数据*/msg[1].buf = val; /* 读取数据缓冲区 */msg[1].len = len; /* 要读取的数据长度*/ret = i2c_transfer(client->adapter, msg, 2);if(ret == 2) {ret = 0;} else {printk("i2c rd failed=%d reg=%06x len=%d\n",ret, reg, len);ret = -EREMOTEIO;}return ret;
}/** @description : 向ap3216c寄存器写入数据* @param - dev: ap3216c设备* @param - reg: 要写入的寄存器首地址* @param - val: 要写入的数据缓冲区* @param - len: 要写入的数据长度* @return : 操作结果*/
static s32 ap3216c_write_regs(struct ap3216c_dev *dev, u8 reg, u8 *buf, u8 len)
{u8 b[256];struct i2c_msg msg;struct i2c_client *client = (struct i2c_client *)dev->client;b[0] = reg; /* 寄存器首地址 */memcpy(&b[1],buf,len); /* 将要写入的数据拷贝到数组b里面 */msg.addr = client->addr; /* ap3216c地址 */msg.flags = 0; /* 标记为写数据 */msg.buf = b; /* 要写入的数据缓冲区 */msg.len = len + 1; /* 要写入的数据长度 */return i2c_transfer(client->adapter, &msg, 1);
}
SPI
SPI总线的操作与I2C总线操作相似。
电气属性
spi1_pins_a: spi1-0 {pins1 {pinmux = <STM32_PINMUX('Z', 0, AF5)>, /* SPI1_SCK */<STM32_PINMUX('Z', 2, AF5)>; /* SPI1_MOSI */bias-disable;drive-push-pull;slew-rate = <1>;};pins2 {pinmux = <STM32_PINMUX('Z', 1, AF5)>; /* SPI1_MISO */bias-disable;};pins3 {pinmux = <STM32_PINMUX('Z', 3, GPIO)>; /* SPI1_NSS */bias-pull-up;drive-push-pull;output-high;slew-rate = <0>;};
};spi1_sleep_pins_a: spi1-sleep-0 {pins {pinmux = <STM32_PINMUX('Z', 0, ANALOG)>, /* SPI1_SCK */<STM32_PINMUX('Z', 1, ANALOG)>, /* SPI1_MISO */<STM32_PINMUX('Z', 2, ANALOG)>; /* SPI1_MOSI */<STM32_PINMUX('Z', 3, ANALOG)>; /* SPI1_NSS */};
};
设备树节点
&spi1 {pinctrl-names = "default", "sleep";pinctrl-0 = <&spi1_pins_a>;pinctrl-1 = <&spi1_sleep_pins_a>;cs-gpios = <&gpioz 3 GPIO_ACTIVE_LOW>;status = "okay";spidev: icm20608@0 {compatible = "alientek,icm20608";reg = <0>; /* CS #0 */spi-max-frequency = <8000000>;};
};
驱动代码
/** @description : 从icm20608读取多个寄存器数据* @param - dev: icm20608设备* @param - reg: 要读取的寄存器首地址* @param - val: 读取到的数据* @param - len: 要读取的数据长度* @return : 操作结果*/
static int icm20608_read_regs(struct icm20608_dev *dev, u8 reg, void *buf, int len)
{int ret = -1;unsigned char txdata[1];unsigned char * rxdata;struct spi_message m;struct spi_transfer *t;struct spi_device *spi = (struct spi_device *)dev->spi;t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL); /* 申请内存 */if(!t) {return -ENOMEM;}rxdata = kzalloc(sizeof(char) * len, GFP_KERNEL); /* 申请内存 */if(!rxdata) {goto out1;}/* 一共发送len+1个字节的数据,第一个字节为寄存器首地址,一共要读取len个字节长度的数据,*/txdata[0] = reg | 0x80; /* 写数据的时候首寄存器地址bit8要置1 */ t->tx_buf = txdata; /* 要发送的数据 */t->rx_buf = rxdata; /* 要读取的数据 */t->len = len+1; /* t->len=发送的长度+读取的长度 */spi_message_init(&m); /* 初始化spi_message */spi_message_add_tail(t, &m);/* 将spi_transfer添加到spi_message队列 */ret = spi_sync(spi, &m); /* 同步发送 */if(ret) {goto out2;}memcpy(buf , rxdata+1, len); /* 只需要读取的数据 */out2:kfree(rxdata); /* 释放内存 */
out1: kfree(t); /* 释放内存 */return ret;
}/** @description : 向icm20608多个寄存器写入数据* @param - dev: icm20608设备* @param - reg: 要写入的寄存器首地址* @param - val: 要写入的数据缓冲区* @param - len: 要写入的数据长度* @return : 操作结果*/
static s32 icm20608_write_regs(struct icm20608_dev *dev, u8 reg, u8 *buf, u8 len)
{int ret = -1;unsigned char *txdata;struct spi_message m;struct spi_transfer *t;struct spi_device *spi = (struct spi_device *)dev->spi;t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL); /* 申请内存 */if(!t) {return -ENOMEM;}txdata = kzalloc(sizeof(char)+len, GFP_KERNEL);if(!txdata) {goto out1;}/* 一共发送len+1个字节的数据,第一个字节为寄存器首地址,len为要写入的寄存器的集合,*/*txdata = reg & ~0x80; /* 写数据的时候首寄存器地址bit8要清零 */memcpy(txdata+1, buf, len); /* 把len个寄存器拷贝到txdata里,等待发送 */t->tx_buf = txdata; /* 要发送的数据 */t->len = len+1; /* t->len=发送的长度+读取的长度 */spi_message_init(&m); /* 初始化spi_message */spi_message_add_tail(t, &m);/* 将spi_transfer添加到spi_message队列 */ret = spi_sync(spi, &m); /* 同步发送 */if(ret) {goto out2;}out2:kfree(txdata); /* 释放内存 */
out1:kfree(t); /* 释放内存 */return ret;
}
UART/RS232/RS485
Linux也提供了串口相关的驱动库供我们使用。
usart3_pins_c: usart3-2 {pins1 {pinmux = <STM32_PINMUX('D', 8, AF7)>; /* USART3_TX */bias-disable;drive-push-pull;slew-rate = <0>;};pins2 {pinmux = <STM32_PINMUX('D', 9, AF7)>; /* USART3_RX */bias-disable;};
};usart5_pins_a: usart5-0 {pins1 {pinmux = <STM32_PINMUX('B', 13, AF14)>; /* USART5_TX */bias-disable;drive-push-pull;slew-rate = <0>;};pins2 {pinmux = <STM32_PINMUX('B', 12, AF14)>; /* USART5_RX */bias-disable;};
};
设备树节点
aliases节点用于设置串口别名,串口驱动会读取aliases节点数据,表示在系统启动生成一个名为“/dev/ttySTM0”的设备文件,serial1就会生成“/dev/ttySTM1”如此类推,最多 8 个。
# 这个在根节点下
/{
......aliases {serial0 = &uart4;serial1 = &uart5;serial2 = &usart3;};
......
};&usart3 {pinctrl-names = "default";pinctrl-0 = <&usart3_pins_c>;status = "okay";
};&uart5 {pinctrl-names = "default";pinctrl-0 = <&usart5_pins_a>;status = "okay";
};
串口软件移植
minicom 类似我们常用的串口调试助手,是 Linux 下很常用的一个串口工具,builroot里面已经集成了这个软件,所以只需重新配置builroot就行。


sudo make # 保持上述配置后,进行编译
cd output/images/ #进入到 output/images 目录
sudo tar -axvf rootfs.tar -C /home/jozenlee/arm_linux/nfs/rootfs #解压到 nfsroot 目录
minicom配置
minicom -s #打开配置界面
CAN
STM32MP1提供的是功能更强大的FDCAN控制器,支持数据高速传输,并且数据量从8位加到了64位
电气属性
m_can1_pins_a: m-can1-0 {pins1 {pinmux = <STM32_PINMUX('H', 13, AF9)>; /* CAN1_TX */slew-rate = <1>;drive-push-pull;bias-disable;};pins2 {pinmux = <STM32_PINMUX('I', 9, AF9)>; /* CAN1_RX */bias-disable;};
};m_can1_sleep_pins_a: m_can1-sleep-0 {pins {pinmux = <STM32_PINMUX('H', 13, ANALOG)>, /* CAN1_TX */<STM32_PINMUX('I', 9, ANALOG)>; /* CAN1_RX */};
};
设备树节点
&m_can1 {pinctrl-names = "default", "sleep";pinctrl-0 = <&m_can1_pins_a>;pinctrl-1 = <&m_can1_sleep_pins_a>;status = "okay";
};
软件移植
iproute2


can-utils

应用指令
# 设置 can0 速度为 1000Kbit/s,使用的是一般模式
ip link set can0 type can bitrate 1000000 # 设置 can0 速度为 1000Kbit/s,数据波特率为 5000 kBit/s,使用FDCAN
ip link set can0 up type can bitrate 1000000 dbitrate 5000000 fd on
ip link set can0 up type can bitrate 200000 dbitrate 1000000 fd on
ip link set can0 up type can bitrate 100000 dbitrate 500000 fd on# 打开can0
ifconfig can0 up# 关闭can0
ifconfig can0 down# 接收数据
candump can0# 发送数据
cansend can0 5A1#11.22.33.44.55.66.77.88
相关文章:
【嵌入式Linux学习笔记】基于Linux官方库的标准外设驱动
对于标准的外设如LED,KEY,PWM等,以及标准通信协议,Linux都自带有标准的驱动库,不需要我们自行编写,只需要配置好相应的GPIO属性和电气属性,即可匹配相应的驱动,在应用程序中直接使用…...
网络爬虫抓包工具
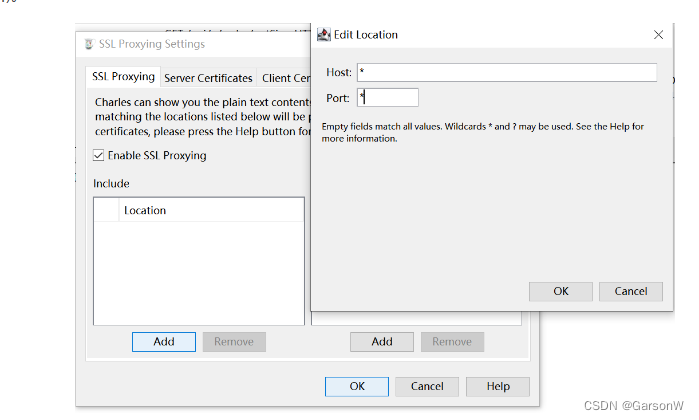
📚介绍:Charles是著名的抓包工具🐂,可以抓取移动端与pc端网络访问🕷的所有数据。我们将使用它抓取我们与小程序交互的所有信息。🎇我们可以百度搜索Charles官网下载适用于自己系统的Charles安装包…...
蓝桥杯倒计时 | 倒计时17天
作者🕵️♂️:让机器理解语言か 专栏🎇:蓝桥杯倒计时冲刺 描述🎨:蓝桥杯冲刺阶段,一定要沉住气,一步一个脚印,胜利就在前方! 寄语💓:…...
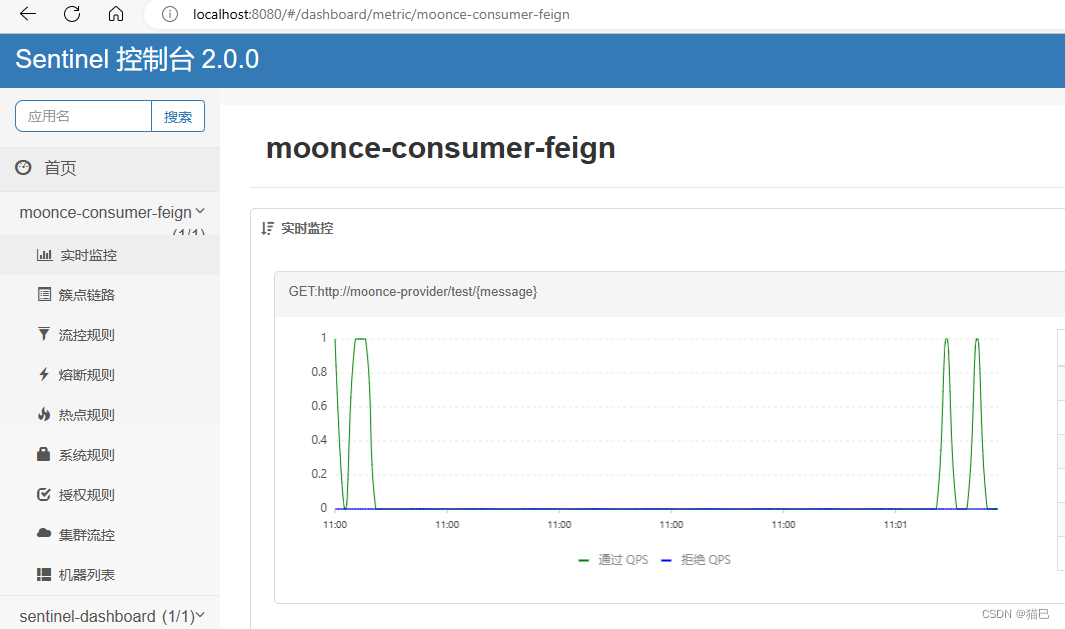
【Spring Cloud Alibaba】7.Sentinel熔断器仪表盘监控
文章目录简介什么是 Sentinel控制台获取源码方式下载jar包方式启动访问服务配置项目,启用Sentinel完整配置测试简介 接下来我们通过Sentinel控制台来实现对服务消费者提供的熔断机制进行监控和控制,本操作先要完成之前的步骤,详情请参照【Sp…...
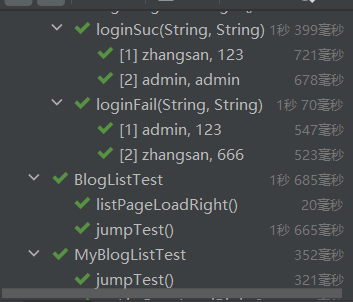
个人博客系统项目测试报告
项目背景介绍 背景:当在学习一项技能的时候,我们总会习惯通过博客来记录所学的知识点,方便后期遗忘时随时查看和快速复习。本次开发的Web网站程序便是为了更加轻量和方便地记录自己的学习笔记 概述:一个Web网站程序,…...

flutter安装自用笔记
参照文章: 开发环境搭建 Flutter环境配置步骤: 1.系统配置要求 2.Java环境 3.Flutter SDK 4.Android 开发环境一、系统配置要求 操作系统:Windows 7 SP1 或更高的版本(基于 x86-64 的 64 位操作系统) 磁盘空间&…...
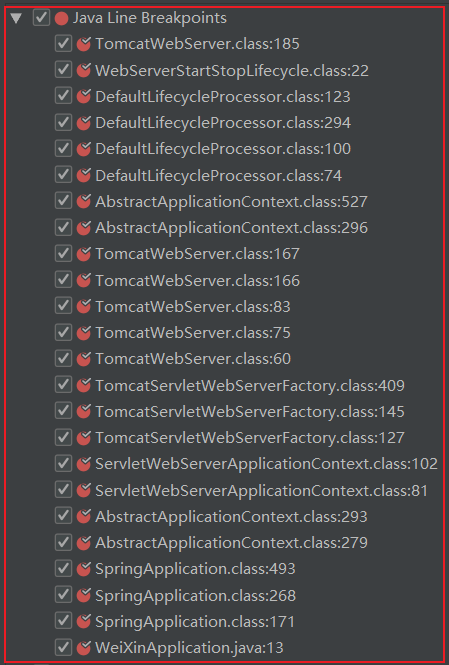
tomcat线程池以及在SpringBoot中的启动过程
tomcat两大组件:连接器Connector,容器Container tomcat线程池 Tomcat线程池扩展了ThreadPoolExecutor,行为稍有不同 重写了ThreadPoolExecutor的execute方法 如果总线程数达到maximumPoolSize,不会立刻抛RejectedExecutionExcept…...
第十四届中国大学生创新创业大赛
文章目录比赛官网比赛题目含金量非常高建议参加的学生推荐几个我感兴趣的题目联系比赛官网 官网地址:http://www.fwwb.org.cn/ 实际叫做:中国大学生创新创业大赛 比赛题目 题目公布查看地址:http://www.fwwb.org.cn/topic/index 题目有…...

LeetCode:322. 零钱兑换——动态规划从案例入门
🍎道阻且长,行则将至。🍓 🌻算法,不如说它是一种思考方式🍀算法专栏: 👉🏻123 一、🌱322. 零钱兑换 题目描述:给你一个整数数组coins,…...
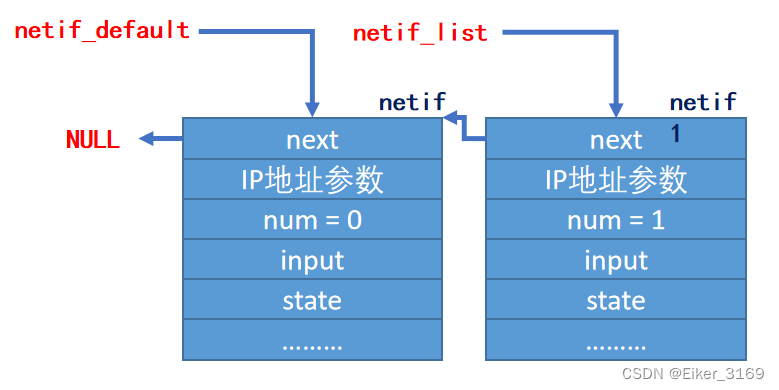
【lwIP(第四章)】网络接口
目录一、lwIP网络接口简介二、lwIP的netif结构三、lwIP的netif相关函数1. lwIP网络接口的全局变量2. netif_add()函数3. netif_remove()函数4. netif_set_default()函数一、lwIP网络接口简介 lwIP协议栈支持多种不同的网络接口(网卡),由于网卡…...

Vue3 pinia入门篇(一)
系列文章目录 主要为了记录如何使用Pinia在Vue3中的使用方式(下面会介绍为什么使用Vue3选型) 文章目录系列文章目录不用Vue2使用Pinia举例子?1.笔者的个人看法:2.总结一、Pinia是什么1.状态管理工具(类比Vuexÿ…...

python面向对象编程解释
python是一个面向对象的编程语言 面向过程的开发语言有C,面向对象除了python还有java等语言 具体来讲: 面向过程 :举个例子,比如说,把大象装进冰箱总共分几步,第一步,把冰箱门打开,…...
ARM(IMX6U)嵌入式软件裸机开发之环境搭建与配置
目录 前沿 Ubuntu 和 Windows 文件互传 Ubuntu 下 NFS 和 SSH 服务开启 Ubuntu 交叉编译工具链安装 Source Insight 软件安装和使用 Visual Studio Code 软件的安装和使用 前沿 为什么我们要学习裸机开发呢? 1、裸机开发是了解所使用的 CPU 最直接、最简单的方…...

Java文件复制多种方法
1、InputStream与OutputStream 创建两个文件 - 源和目标。然后我们从源创建InputStream并使用OutputStream将其写入目标文件进行 java 复制文件操作。 private static void copyFileUsingStream(File source, File dest) throws IOException {InputStream is null;OutputStr…...
Java语言-----封装、继承、抽象、多态、接口
目录 前言 一.封装 1.1封装的定义 1.2访问修饰符的使用 二.继承 2.1继承的定义 2.2继承的方法 2.3继承使用注意点 三.多态 3,1多态的定义 3.2动态绑定 3.3方法重写 3.4向上(向下)转型 四.抽象 4.1抽象的概述和定义 4.2抽象的使用 五…...
基于深度学习的瓶子检测软件(UI界面+YOLOv5+训练数据集)
摘要:基于深度学习的瓶子检测软件用于自动化瓶子检测与识别,对于各种场景下的塑料瓶、玻璃瓶等进行检测并计数,辅助计算机瓶子生产回收等工序。本文详细介绍深度学习的瓶子检测软件,在介绍算法原理的同时,给出Python的…...
仿网易云小程序(一)
目录 一、项目准备 二、项目初始化 1.新建项目 2.封装service请求 三、底部导航栏的设计 四、MV页面的设计 1.将获取到的数据进行渲染 2.播放量数据进行处理转换 3.时长数据进行处理转换 五、MV组件的抽离封装 六、请求的抽离video 七、下拉重新请求新的数据 八、跳转到…...
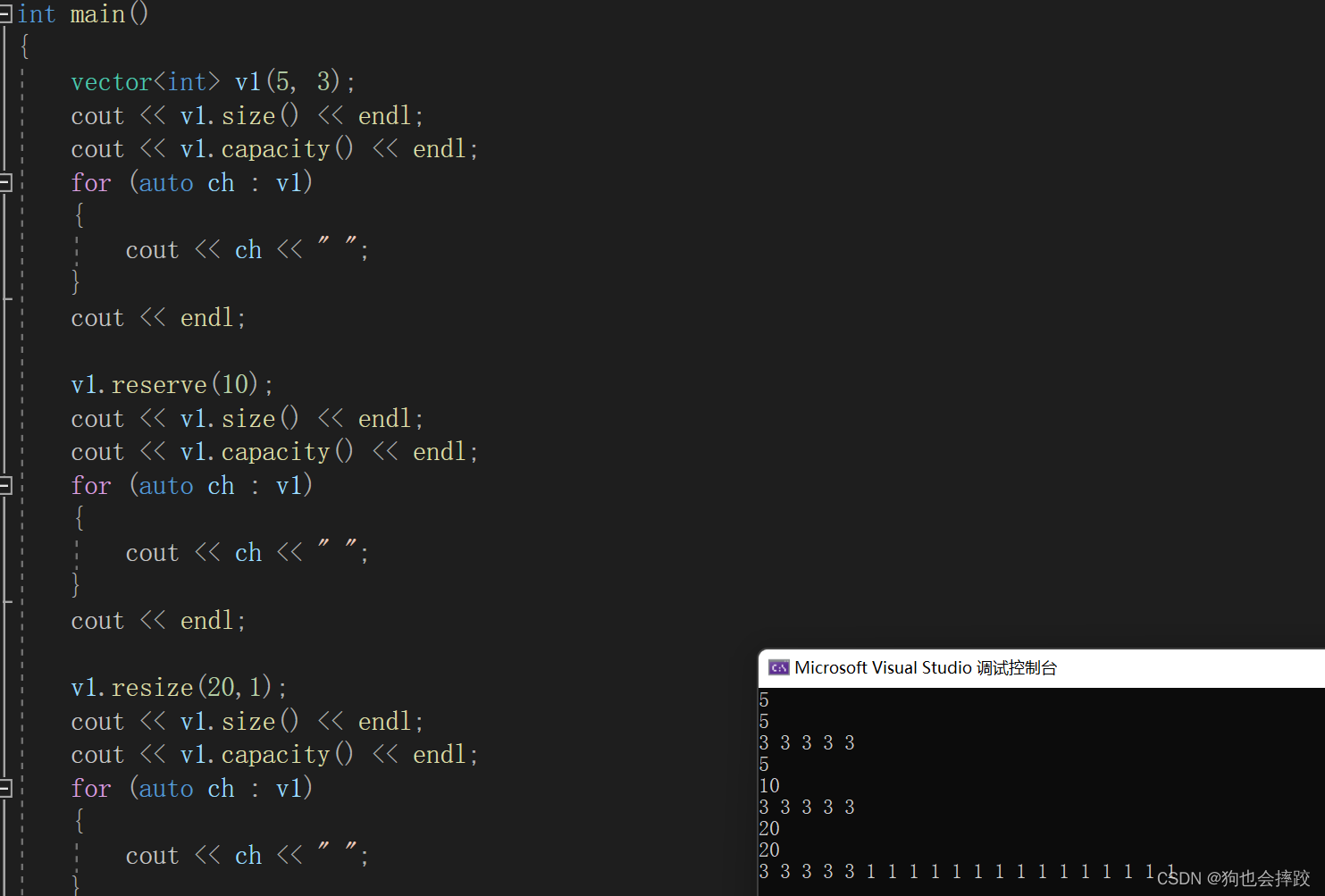
【C++】vector模拟实现及其应用
文章目录vector的介绍vector的使用及其实现vector的定义vector iterator 的使用vector空间增长问题vector的增删查改vector的介绍 vector是表示可变大小数组的序列容器。就像数组一样,vector也采用的连续存储空间来存储元素。也就是意味着可以采用下标对vector的元素…...
JS看这一篇就够啦,JS基础大全,可用于快速回顾知识,面试首选
1 JS简介 更多JS内容可以看MDN:点击传送 浏览器分成两部分:渲染引擎和 JS 引擎 渲染引擎:用来解析HTML与CSS,俗称内核,比如 chrome 浏览器的 blink ,老版本的 webkitJS 引擎:也称为 JS 解释器…...
武汉凯迪正大GB4208外壳防护等级试具
一、IP1X 试验探棒 产品概述: 符合IEC61032图1试具A、GB16842试具A、GB4208IP1、IEC60529IP1、IEC60065 等标准要求。用于防止手背触及的防护检验。 技术参数: 1、探球直径:50mm 2、挡板直径:45mm 3、挡板厚度:…...

构建高可用代理池:开源工具agentpull的架构解析与实战部署
1. 项目概述:一个轻量级、可编程的代理拉取工具最近在折腾一些自动化任务和分布式爬虫时,经常遇到一个头疼的问题:如何高效、稳定地管理海量的代理IP资源。无论是数据采集、社交媒体运营还是安全测试,一个可靠的代理池都是基础设施…...

知识竞赛代表队分组方法详解
🎲 知识竞赛代表队分组方法详解公平 均衡 策略 让每一支队伍都在合适的起点🎯 引言知识竞赛中,代表队的合理分组是赛事公平与精彩的基础。无论是学校比赛、企业活动还是大型公开赛,组织者都需要根据队伍数量和赛制选择合适的分…...

Windows热键侦探:快速定位热键冲突的终极解决方案
Windows热键侦探:快速定位热键冲突的终极解决方案 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你是否曾经遇…...

ARM GIC中断控制器分组机制与安全配置详解
1. GIC中断控制器基础架构解析在ARM架构的嵌入式系统中,通用中断控制器(Generic Interrupt Controller,GIC)扮演着系统中断管理的核心角色。作为连接外设中断与CPU之间的桥梁,GIC的设计直接影响着系统的实时性、安全性…...
)
保姆级教程:从NCBI下载序列到MEGA7构建进化树(附拟南芥SPL15基因实战)
生物信息学实战:从基因检索到进化树构建的全流程解析 在分子生物学研究中,系统进化分析是理解基因家族演化关系的重要工具。对于刚接触生物信息学的学生来说,从零开始完成一个完整的进化树分析项目往往面临诸多挑战——如何获取目标基因序列…...

专业级音频编辑免费开源:Audacity 4.0 全面解析与使用指南
专业级音频编辑免费开源:Audacity 4.0 全面解析与使用指南 【免费下载链接】audacity Audio Editor 项目地址: https://gitcode.com/GitHub_Trending/au/audacity 还在为寻找一款功能全面、易于上手且完全免费的音频编辑软件而烦恼吗?是否曾经因…...

阿里云百炼 + OpenClaw 打造超强自动化 AI
前置准备 已安装并可正常打开 OpenClaw Windows 版本 OpenClaw 部署包获取:https://xiake.yun/api/download/package/14?promoCodeIVD643FDE29AOpenClaw 顶部 Gateway 状态显示为在线准备好可正常登录的阿里云账号可正常访问阿里云百炼控制台地址确认账号已开通百…...

DIY蓝牙街机摇杆:从零打造无线复古游戏控制器
1. 项目概述与核心思路作为一个玩了二十多年街机,也折腾了十几年硬件的“老炮儿”,我始终觉得,有些东西的味道是数字模拟不出来的。比如,用键盘或现代手柄玩《拳皇97》或《合金弹头》,总觉得少了点灵魂——那“咔哒咔哒…...

免费音频编辑终极指南:Audacity如何让专业音频处理变得简单
免费音频编辑终极指南:Audacity如何让专业音频处理变得简单 【免费下载链接】audacity Audio Editor 项目地址: https://gitcode.com/GitHub_Trending/au/audacity 还在为音频编辑软件的高昂价格而烦恼?是否曾因复杂的音频工具而放弃创作&#x…...

FanControl风扇控制:3分钟掌握专业级Windows散热管理终极指南
FanControl风扇控制:3分钟掌握专业级Windows散热管理终极指南 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Tren…...