深度学习-目标检测(四)-Faster R-CNN
目录
一.模型框架
二:步骤详细
1.conv layers
2.RPN
3.anchors
4.cls layer分类
5.reg layer回归
6.Proprosal
7.Rol pooling
8.Classification
三.训练
1.训练RPN网络
2.全连接层部分训练:
都看到这里了,点个赞把!!!!!
在Faster R-CNN中加入一个提取边缘的神经网络,也就说找候选框的工作也交给神经网络来做了。这样,目标检测的四个基本步骤(候选区域生成,特征提取,分类,位置精修)终于被统一到一个深度网络框架之内。

一.模型框架

如图:
1.conv layers:用于提取特征,通过conv+relu+pooling层来提取图像的feature maps (特征图)
2.RPN(Region Proposal Network)区域候选网络:替换了之前哪些的Selective Searvh,用于生成候选框。它里面做了一个二分类任务,一类是判断anchor是属于positive(识别的东西),另一类是判断是否是negative(不是目标的背景);还有一个bounding box regression:修正anchors得到较为准确的proposals,简单来说就是让候选框准确点。RPN是判断这张图片里面有没有目标,具体目标是什么这里还没判断,以及修正anchor的边框
3.Rol Pooling(兴趣域池化):简单来是就是收集RPN中选出来的候选框的坐标,一般收集左上角和右下角。并且将这些坐标对于1中提取的特征图中的特征,生成proposals feature maps送人全连接层
4.Classification and Regression:利用3中送入的数据计算出整个图片中的类别,同时再做一次bounding box regression获得检测框最终的精准位置

二:步骤详细
1.conv layers
如上图所示,共有13个conv层,13个relu层,4个pooling层
conv:kernel_size=3,padding=1,stride=1。核卷积操作类似,使用3*3的卷积核,一层零,步长为1
pooling:kernel_size=2,padding=0,stride=2。池化操作
经过conv层时数据变化为:
height=(h-k+2*p)/s+1=h-3+3,数据大小没变
width=(w-k+2*p)/s+1,数据大小没变
经过pooling时,因为步长为2,所以数据的宽高变为了之前的一办,有四个pooling,所以数据变为之前的1/16
2.RPN

图中所示,分为两个操作
1.softmax分类anchors获得positive和negative分类
2.计算对于每个anchors的bounding box regression(边框)偏移量,以获取比较精确的proposal
两步操作后在proposal结合,proposal层复杂将positive anchors和对应的bounding box regression偏移量获取修正后的proposals。同时剔除没有框住物体的和超出图片边界的proposals。
3.anchors

经过conv leyer处理后的feature map(特征图)的大小为原来的1/16,同时在这些feature map中,经过conv操作后因为设置的是kernel_size=3的映射,所以对于每一个像素点,设置了9个预测anchor。这9个anchor的大小按照三种长宽比ratio[1:1,1:2,2:1]设置,具体大小根据输入图像的原始目标大小灵活设置。
设置anchor是为了覆盖图像上各个位置各种大小的目标,那么原图上anchor的数量就是(M/16) x (N/16) x 9。这么多anchor,第一肯定不准确,第二肯定不能要这么多,所以后续还会淘汰一大批以及修正anchor位置
4.cls layer分类

在拿到conv layers的feature map后,先经过一个3x3卷积(卷积核个数为256)红色框是一个anchor,所以通过这个卷积层后feature map的通道数也是256,k是anchor个数(文中默认是9)
(M/16)x(N/16)x256的特征通过1x1卷积得到(M/16)x(N/16)x2k的输出,因为这里是二分类判断positive和negative,所以该feature map上每个点的每个anchor对应2个值,表示目标和背景的概率(为什么有2个,是因为这里是用的softmax,这两个值加起来等于1;也可以用sigmoid,就只需要1个值了)

Reshape层是技术细节问题,对feature map进行维度变换,使得有一个单独的维度为2,方便在该维度上进行softmax操作,之后再Reshape恢复原状。
5.reg layer回归

(M/16)x(N/16)x256的特征通过1x1卷积得到(M/16)x(N/16)x4k的输出,因为这里是生成每个anchor的坐标偏移量(用于修正anchor),[tx,ty,tw,th]共4个所以是4k。注意,这里输出的是坐标偏移量,不是坐标本身,要得到修正后的anchor还要用原坐标和这个偏移量运算一下才行。
偏移量计算公式

其中[xa,ya,wa,ha]是anchor的中心点坐标和宽高,[tx.ty,tw,th]是这个回归层预测的偏移量,通过这个公式计算出修正后的anchor坐标[x,y,w,h]。计算如下:

[px,py,pw,ph]表示原始anchor的坐标
[dx,dy,dw,dh]表示RPN网络预测的坐标偏移
[gx,gy,gw,gh]表示修正后的anchor坐标。

6.Proprosal

分类和偏移量计算完后,将数据输入到Proposal,输入的有三个
cls层生成的数据
reg层生成的数据
im_info=[宽,高,scale_factor]
接收数据后会进行:
1.利用reg层的偏移量对所有原始的anchor进行修改
2.利用cls层的scores,按positive socres排序,取前面分数大的
3.将太大的positive anchor收拢到边框处,将太小的剔除
4.对剩余的positive anchors进行非极大抑制(NMS)
5.输出每个positive anchors的左上角和右下角坐标
7.Rol pooling

RoI Pooling层则负责收集proposal(上一个操作输出的坐标数据),并计算出proposal feature maps(从conv layers后的feature map中扣出对应位置),输入有两个:
1.conv layers 剔除的原始特征图feature map
2.RPN网络生成的Proposals
因为全连接层的每次输入数据大小都需要是固定的,所有需要一个操作来讲这些数据的大小统一一下,,而Rol Pooling就是讲图片固定大小的
8.Classification
具体分类,这里的分类是讲前面准备好的positive anchors识别具体分类,这里就可以分辨出是背景还是具体物体了。

1.通过全连接层的softmax对所有的proposals进行具体分类
2.再次对proposals进行bounding box regression处理,获得更好的边框
三.训练
Faster RCNN由于是two-stage检测器,训练要分为两个部分进行,一个是训练RPN网络,一个是训练后面的分类网络。
1.先使用ImageNet的预训练权重初始化RPN网络的共享conv层(RPN特有层可随机初始化),然后训练RPN网络。训练完后,共享conv层和RPN特有层的权重都更新了。
2.根据训练好的RPN网络拿到proposals(和测试过程一样)
3.再次使用ImageNet的预训练权重初始化Faster RCNN网络的贡献conv层(Faster RCNN特有层随机初始化),然后训练Faster RCNN网络。训练完后,共享conv层和Faster RCNN特有层的权重都更新了
4.使用第三步训练好的共享conv层和第一步训练好的RPN特有层来初始化RPN网络,第二次训练RPN网络。但这次要把共享conv层的权重固定,训练过程中保持不变,只训练RPN特有层的权重
5.根据训练好的RPN网络拿到proposals(和测试过程一样)
6.依然使用第三步训练好的共享conv层和第三步训练好的Faster RCNN特有层来初始化Faster RCNN网络,第二次训练Faster RCNN网络。同样,固定conv层,只fine tune特有部分
1.训练RPN网络
因为使用的是softmax,所以使用交叉熵损失来训练anchors是物体还是背景
对于边框部分训练,使用smooth L1 loss训练
smooth L1 loss:

2.全连接层部分训练:
和RPN一样,都是使用softmax分类和训练边框
都看到这里了,点个赞把!!!!!
相关文章:
深度学习-目标检测(四)-Faster R-CNN
目录 一.模型框架 二:步骤详细 1.conv layers 2.RPN 3.anchors 4.cls layer分类 5.reg layer回归 6.Proprosal 7.Rol pooling 8.Classification 三.训练 1.训练RPN网络 2.全连接层部分训练: 都看到这里了,点个赞把!&a…...

MATLAB中的无线通信系统设计有哪些最佳实践
在无线通信系统设计领域,MATLAB提供了一套强大的工具箱,使得系统设计、仿真、测试和分析变得更加高效和精确。本文将探讨MATLAB在无线通信系统设计中的最佳实践,包括信号处理、调制与解调、信道建模、误码率分析以及无线通信标准的实现。 1.…...

Java的发展史与前景
🌈个人主页:Yui_ 🌈Linux专栏:Linux 🌈C语言笔记专栏:C语言笔记 🌈数据结构专栏:数据结构 🌈C专栏:C 文章目录 0. Java语言的发展史1.概述1.1 什么是Java1.2 …...

2024年上海小学生古诗文大会倒计时30多天:做几道今年的官方模拟题
2024年上海市小学生古诗文大会自由报名活动的初赛日期于10月19日开始,距离今天只有34天了。 小学生古诗文大会考什么?怎么考呢?今天好真题就带着大家来做一做官方发布的2024年小学生古诗文大会的模拟题,根据往年的经验࿰…...

IDEA 常用配置和开发插件
件市场中搜索并安装“Git Integration”插件。 一、前言 在本篇文章中我会为大家总结一些我自己常用的配置和开发插件,此外也给大家提供一个建议,可以根据自己的项目需求和个人偏好选择适合的插件。另外,IDEA 也在不断更新,可能会…...

还在为企微联系人烦恼?一招解决!企业微信2024年效率升级全攻略
现在信息多得让人眼花,微信里头那些企业微信的联系人是不是让你头疼? 看着满屏的绿色头像,心里想:“我就想和朋友聊聊天,怎么就这么难?”别急,今天教你个办法,轻松搞定这些小烦恼&am…...

【docker npm】npm 私库
1.部署环境 window 11 x64Docker Desktop 4.34.1 (166053) Docker Engine v27.2.0 1.1.Docker 镜像源 1.1.1.Docker Engine 配置 {"builder": {"features": {"buildkit": true},"gc": {"defaultKeepStorage": "32…...

完整gpt应用(自用)
qrc.py 把gpt_qrc.qrc转化成gpt_qrc.py pyrcc5 -o icons_rc.py icons.qrc <RCC><qresource prefix"img"><file>img/53.png</file><file>img/ai.png</file><file>img/关闭.png</file><file>img/最小化.png&l…...

【信息论基础第二讲】离散信源的数学模型及其信息测度包括信源的分类、信源的数学模型、离散信源的信息测度、二元信源的条件熵联合熵
一、信源的分类 二、信源的数学模型 1、信源的概念 在通信系统中,收信者在未收到信息以前,对信源发出什么消息是不确定的、随机的、因此我们可以用随机变量、随机序列或者随机过程来描述信源的输出。严格地说,用概率空间来描述信源输出。 …...

在 Spring Boot 项目中连接 IBM AS/400 数据库——详细案例教程
文章目录 1. 添加 jt400 依赖2. 下载 jt400 驱动包依赖下载手动下载下载地址:手动下载 JAR 的步骤: 3. 配置 application.properties 或 application.yml(1)application.properties(2)application.yml 4. 数…...

VUE + NODE 历史版本安装
以node 12.20.0为例子,想下载哪个版本,后面写哪个版本 https://registry.npmmirror.com/binary.html?pathnode/v12.20.0/ 安装国内镜像7.1.0 cnpm npm install -g cnpm7.1.0 -g --registryhttps://registry.npmmirror.com 安装vue脚手架4.5.15 cnpm …...

git reset 几点疑问
疑问:使用 git reset --hard <commit-hash-from-branch-B> 将工作区状态reset为其他branch的某点。 如果当前工作区的分支(比如 branch A)上使用 git reset --hard 将其状态重置为另一个分支(比如 branch B)的某…...
Rust Windows下编译 静态链接VCRuntime140.dll
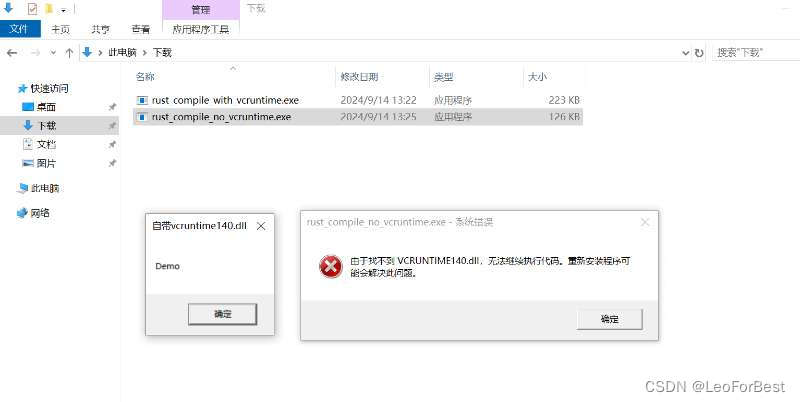
Rust 编译出来的exe默认动态链接VC运行库,分发电脑上需要安装有Microsoft Visual C Redistributable for Visual Studio 2015运行库。 编译时能静态链接进去,就省去客户端未安装运行库的问题。方法如下: 只需在当前根目录下新建.cargo\config.toml&#…...

从“天宫课堂”到人工智能:中国少儿编程的未来在哪里?
近日,中国载人航天“天宫课堂”第三次开讲,激发了全国数百万青少年对科技的热情。从航天技术到人工智能,科技的快速发展正不断改变我们的生活,也让越来越多的家长意识到,未来属于那些掌握编程和创新思维的孩子。与其让…...

ARM base instruction -- blr
BLR Branch with Link to Register calls a subroutine at an address in a register, setting register X30 to PC4. 带寄存器链接的分支在寄存器中的某个地址调用一个子程序,将寄存器 X30 (lr) 设置为 PC4。 BLR <Xn> BLR 跳转到reg内容地址,…...

宠物猫领养馆会员管理系统---附源码72579
目录 1 绪论 1.1 课题目的与意义 1.2国内外研究现状 1.3论文结构与章节安排 1.4 express框架介绍 2 宠物猫领养馆会员管理系统系统分析 2.1 可行性分析 2.1.1 技术可行性分析 2.1.2 经济可行性分析 2.1.3 操作可行性分析 2.2 系统功能分析 2.2.1 功能性分析 2.2.2 …...

驾驶员注意力分神状态检测系统源码分享
驾驶员注意力分神状态检测检测系统源码分享 [一条龙教学YOLOV8标注好的数据集一键训练_70全套改进创新点发刊_Web前端展示] 1.研究背景与意义 项目参考AAAI Association for the Advancement of Artificial Intelligence 项目来源AACV Association for the Advancement of …...

基于less和scss 循环生成css
效果 一、less代码 复制代码 item-count: 12; // 生成多少个 .item 类.item-loop(n) when (n > 0) {.icon{n} {background: url(../../assets/images/menu/icon{n}.png) no-repeat;background-size: 100% 100%;}.item-loop(n - 1);}.item-loop(item-count);二、scss代码 f…...

opencv之Canny边缘检测
文章目录 前言1.应用高斯滤波去除图像噪声2.计算梯度3.非极大值抑制4.应用双阈值确定边缘5.Canny函数及使用 前言 Canny边缘检测是一种流行的边缘检测算法,用于检测图像中的边缘。它通过一系列步骤将图像中的像素边缘突出显示出来,主要分为以下几个步骤…...

springBoot 集成https
springBoot 集成https 1、springBoot默认的证书格式 pring Boot 需要 .p12 或 .jks 格式的证书。如果你只有 .pem 和 .key 文件,可以使用 openssl 工具将它们转换成 .p12 文件 2、转换.p12 我的证书文件如下,需要转换 2.1 下载openssl https://slpr…...
)
数据结构第6章树和二叉树:课后习题全解析(选择题+填空题+综合题+算法设计题)
第6章 树和二叉树 课后习题一、单项选择题1. 一棵有 n 个结点,采用链式存储的二叉树中,共有( A )个指针域为空。A. n1 B. n C. n−1 D. n−2解析: 链式存储二叉树中,每个结点有 2 个指针域(左孩…...

从零构建MCP服务:AI应用外部工具集成入门指南
1. 项目概述:从零构建你的第一个MCP服务 最近在AI应用开发圈里,MCP(Model Context Protocol)这个词的热度越来越高。如果你正在尝试将大型语言模型(LLM)的能力集成到自己的应用里,或者想为你的A…...

问卷星 vs 腾讯问卷 vs 金数据:2026主流问卷工具AI开放能力最新横评
作为问卷调研行业的深度观察者,老N近期注意到调研工具链正在发生一场静悄悄的革命。最近,问卷星正式上线了AI工具包(wjx-ai-kit),其CLI(命令行工具)支持多达67个子命令,并适配了Clau…...

DockDoor终极指南:快速掌握macOS窗口预览与高效切换
DockDoor终极指南:快速掌握macOS窗口预览与高效切换 【免费下载链接】DockDoor Window peeking, alt-tab and other enhancements for macOS 项目地址: https://gitcode.com/gh_mirrors/do/DockDoor 还在为macOS上繁琐的窗口切换而烦恼吗?DockDoo…...

NoFences:三分钟让你的Windows桌面从混乱到有序的免费开源方案
NoFences:三分钟让你的Windows桌面从混乱到有序的免费开源方案 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 你是否也曾面对满屏杂乱无章的图标感到无从下手&am…...

深入解析浮点数内存存储与IEEE 754标准:从0.1+0.2≠0.3说起
1. 从一次“诡异”的计算错误说起前几天,一个刚入行的同事跑来找我,一脸困惑地给我看了一段Python代码。他写了个简单的循环累加,想计算0.1加10次,理论上应该等于1.0。但打印出来的结果却是0.9999999999999999。他反复检查了代码&…...

Blender到Unity模型导出的终极解决方案:免费插件完整指南
Blender到Unity模型导出的终极解决方案:免费插件完整指南 【免费下载链接】blender-to-unity-fbx-exporter FBX exporter addon for Blender compatible with Unitys coordinate and scaling system. 项目地址: https://gitcode.com/gh_mirrors/bl/blender-to-uni…...

Figma中文汉化插件完整指南:3分钟让Figma界面说中文的终极方案
Figma中文汉化插件完整指南:3分钟让Figma界面说中文的终极方案 【免费下载链接】figmaCN 中文 Figma 插件,设计师人工翻译校验 项目地址: https://gitcode.com/gh_mirrors/fi/figmaCN 还在为Figma的英文界面而烦恼吗?对于中文设计师来…...

实时语音AI对话应用开发:从WebRTC到LLM集成的全栈实践
1. 项目概述:实时语音对话的AI应用实践最近在GitHub上看到一个挺有意思的项目,叫proj-airi/webai-example-realtime-voice-chat。光看名字,就能猜到个大概:这是一个基于Web的、利用AI技术实现的实时语音聊天示例。作为一个在音视频…...

JSON Lint深度解析:如何用PHP实现专业级JSON验证与错误处理
JSON Lint深度解析:如何用PHP实现专业级JSON验证与错误处理 【免费下载链接】jsonlint JSON Lint for PHP 项目地址: https://gitcode.com/gh_mirrors/jso/jsonlint 在当今数据驱动的Web开发中,JSON已成为数据交换的标准格式。然而,当…...