行人持刀检测数据集 voc yolo
行人持刀检测数据集 9000张 持刀检测 带标注 voc yolo


行人持刀检测数据集
数据集描述
该数据集旨在用于行人持刀行为的检测任务,涵盖了多种场景下的行人图像,特别是那些携带刀具的行人。数据集包含大量的图像及其对应的标注信息,可用于训练计算机视觉模型,以识别和定位行人手中的刀具。
数据规模
数据集共有9000张图像,这些图像都带有详细的标注信息。
类别及数量
数据集中的主要类别为:
- 行人持刀 (person_with_knife):标注出图像中携带刀具的行人。
标注格式
数据集中的标注信息采用了VOC(Visual Object Classes)格式,每个图像都有一个对应的XML文件,记录了每个对象的位置信息(边界框坐标)和类别标签。此外,也可以选择YOLO格式的标注文件(TXT文件),方便使用YOLO系列模型进行训练。
数据集结构
典型的数据集目录结构如下:
深色版本
1pedestrian_knife_detection_dataset/
2├── Annotations/
3│ ├── img_0001.xml
4│ ├── img_0002.xml
5│ └── ...
6├── ImageSets/
7│ ├── Main/
8│ │ ├── train.txt
9│ │ ├── val.txt
10│ │ └── test.txt
11├── JPEGImages/
12│ ├── img_0001.jpg
13│ ├── img_0002.jpg
14│ └── ...
15└── labels/
16 ├── train/
17 │ ├── img_0001.txt
18 │ ├── img_0002.txt
19 └── val/
20 ├── img_0001.txt
21 ├── img_0002.txt应用场景
该数据集可以用于以下应用场景:
- 公共安全:实时监测公共场所中的行人是否携带刀具,提高公共安全水平。
- 安防监控:辅助安防系统的视频监控,及时发现潜在威胁。
- 事件响应:在发生紧急事件时,快速识别携带刀具的人员,以便采取相应措施。
- 科研分析:用于研究行人持刀行为的识别技术和算法。
示例代码
以下是一个使用Python和相关库(如OpenCV、PyTorch等)来加载和展示数据集的简单示例代码:
python
深色版本
1import os
2import cv2
3import xml.etree.ElementTree as ET
4from PIL import Image
5import numpy as np
6
7# 数据集路径
8dataset_path = 'path/to/pedestrian_knife_detection_dataset/'
9
10# 加载图像和标签
11def load_image_and_label(image_path, annotation_path):
12 # 读取图像
13 image = Image.open(image_path).convert('RGB')
14 # 解析XML文件
15 tree = ET.parse(annotation_path)
16 root = tree.getroot()
17 objects = []
18 for obj in root.findall('object'):
19 name = obj.find('name').text
20 bbox = obj.find('bndbox')
21 xmin = int(bbox.find('xmin').text)
22 ymin = int(bbox.find('ymin').text)
23 xmax = int(bbox.find('xmax').text)
24 ymax = int(bbox.find('ymax').text)
25 objects.append([xmin, ymin, xmax, ymax, name])
26 return image, objects
27
28# 展示图像
29def show_image_with_boxes(image, boxes):
30 img = np.array(image)
31 for box in boxes:
32 xmin, ymin, xmax, ymax, name = box
33 cv2.rectangle(img, (xmin, ymin), (xmax, ymax), (0, 255, 0), 2)
34 cv2.putText(img, name, (xmin, ymin - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
35 cv2.imshow('Image with Boxes', img)
36 cv2.waitKey(0)
37 cv2.destroyAllWindows()
38
39# 主函数
40if __name__ == "__main__":
41 images_dir = os.path.join(dataset_path, 'JPEGImages')
42 annotations_dir = os.path.join(dataset_path, 'Annotations')
43
44 # 获取图像列表
45 image_files = [f for f in os.listdir(images_dir) if f.endswith('.jpg')]
46
47 # 随机选择一张图像
48 selected_image = np.random.choice(image_files)
49 image_path = os.path.join(images_dir, selected_image)
50 annotation_path = os.path.join(annotations_dir, selected_image.replace('.jpg', '.xml'))
51
52 # 加载图像和标签
53 image, boxes = load_image_and_label(image_path, annotation_path)
54
55 # 展示带有标注框的图像
56 show_image_with_boxes(image, boxes)这段代码展示了如何加载图像和其对应的VOC XML标注文件,并在图像上绘制边界框和类别标签。您可以根据实际需求进一步扩展和修改这段代码,以适应您的具体应用场景。
示例代码:从VOC格式转换为YOLO格式
以下是将VOC格式的标注文件转换为YOLO格式的标签文件的示例代码:
python
深色版本
1import os
2import xml.etree.ElementTree as ET
3import shutil
4
5# 数据集路径
6dataset_path = 'path/to/pedestrian_knife_detection_dataset/'
7
8# VOC标注文件目录
9voc_annotations_dir = os.path.join(dataset_path, 'Annotations')
10# 输出YOLO标签文件目录
11yolo_labels_dir = os.path.join(dataset_path, 'labels')
12
13# 创建YOLO标签目录
14os.makedirs(yolo_labels_dir, exist_ok=True)
15
16# 复制VOC图像集划分文件到YOLO目录
17for split in ['train', 'val']:
18 shutil.copy(os.path.join(dataset_path, 'ImageSets/Main/{}.txt'.format(split)), os.path.join(yolo_labels_dir, '{}.txt'.format(split)))
19
20# 从VOC格式转换为YOLO格式
21def convert_voc_to_yolo(voc_path, yolo_path, width, height):
22 with open(voc_path, 'r') as infile:
23 tree = ET.parse(infile)
24 root = tree.getroot()
25 objects = []
26 for obj in root.findall('object'):
27 name = obj.find('name').text
28 bbox = obj.find('bndbox')
29 xmin = int(bbox.find('xmin').text)
30 ymin = int(bbox.find('ymin').text)
31 xmax = int(bbox.find('xmax').text)
32 ymax = int(bbox.find('ymax').text)
33 x_center = (xmin + xmax) / 2.0
34 y_center = (ymin + ymax) / 2.0
35 w = xmax - xmin
36 h = ymax - ymin
37 x_center /= width
38 y_center /= height
39 w /= width
40 h /= height
41 objects.append([name, x_center, y_center, w, h])
42
43 with open(yolo_path, 'w') as outfile:
44 for obj in objects:
45 class_index = {'person_with_knife': 0}[obj[0]] # 假设只有一个类别
46 line = f"{class_index} {obj[1]} {obj[2]} {obj[3]} {obj[4]}\n"
47 outfile.write(line)
48
49# 主函数
50if __name__ == "__main__":
51 # 获取VOC标注文件列表
52 voc_files = [f for f in os.listdir(voc_annotations_dir) if f.endswith('.xml')]
53
54 # 遍历VOC文件并转换为YOLO格式
55 for voc_file in voc_files:
56 # 获取图像尺寸
57 image_file = os.path.join(dataset_path, 'JPEGImages', voc_file.replace('.xml', '.jpg'))
58 image = Image.open(image_file)
59 width, height = image.size
60
61 # 转换并保存YOLO标签文件
62 yolo_file = os.path.join(yolo_labels_dir, voc_file.replace('.xml', '.txt'))
63 convert_voc_to_yolo(os.path.join(voc_annotations_dir, voc_file), yolo_file, width, height)这段代码展示了如何将VOC格式的标注文件转换为YOLO格式的标签文件,方便使用YOLO系列模型进行训练。您可以根据实际需求进一步扩展和修改这段代码,以适应您的具体应用场景。如果您的数据集中有多个类别,请调整 class_index 字典中的映射关系。
相关文章:
行人持刀检测数据集 voc yolo
行人持刀检测数据集 9000张 持刀检测 带标注 voc yolo 行人持刀检测数据集 数据集描述 该数据集旨在用于行人持刀行为的检测任务,涵盖了多种场景下的行人图像,特别是那些携带刀具的行人。数据集包含大量的图像及其对应的标注信息,可用于训练…...

基于51单片机的汽车倒车防撞报警器系统
目录 一、主要功能 二、硬件资源 三、程序编程 四、实现现象 一、主要功能 本课题基于微控制器控制器, 设计一款汽车倒车防撞报警器系统。 要求: 要求:1.配有距离, 用于把车和障碍物之间的距离信号送入控制器。 2.配有报警系…...

NLP 文本匹配任务核心梳理
定义 本质上是做了意图的识别 判断两个内容的含义(包括相似、矛盾、支持度等)侠义 给定一组文本,判断语义是否相似Yi 分值形式给出相似度 广义 给定一组文本,计算某种自定义的关联度Text Entailment 判断文本是否能支持或反驳这个…...

FastAPI 的隐藏宝石:自动生成 TypeScript 客户端
在现代 Web 开发中,前后端分离已成为标准做法。这种架构允许前端和后端独立开发和扩展,但同时也带来了如何高效交互的问题。FastAPI,作为一个新兴的 Python Web 框架,提供了一个优雅的解决方案:自动生成客户端代码。本…...
了解云容器实例云容器实例(Cloud Container Instance)
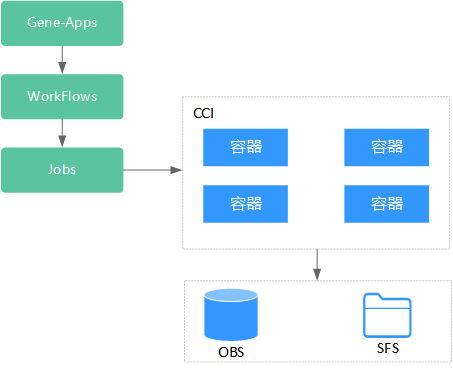
1.什么是云容器实例? 云容器实例(Cloud Container Instance, CCI)服务提供 Serverless Container(无服务器容器)引擎,让您无需创建和管理服务器集群即可直接运行容器。 Serverless是一种架构理念…...

OpenStack Yoga版安装笔记(十三)neutron安装
1、官方文档 OpenStack Installation Guidehttps://docs.openstack.org/install-guide/ 本次安装是在Ubuntu 22.04上进行,基本按照OpenStack Installation Guide顺序执行,主要内容包括: 环境安装 (已完成)OpenStack…...

[系列]参数估计与贝叶斯推断
系列 点估计极大似然估计贝叶斯估计(统计学)——最小均方估计和最大后验概率估计贝叶斯估计(模式识别)线性最小均方估计最小二乘估计极大似然估计&贝叶斯估计极大似然估计&最大后验概率估计线性最小均方估计&最小二乘…...

【Pyside】pycharm2024配置conda虚拟环境
知识拓展 Pycharm 是一个由 JetBrains 开发的集成开发环境(IDE),它主要用于 Python 编程语言的开发。Pycharm 提供了代码编辑、调试、版本控制、测试等多种功能,以提高 Python 开发者的效率。 Pycharm 与 Python 的关系 Pycharm 是…...

【RabbitMQ 项目】服务端:数据管理模块之消息队列管理
文章目录 一.编写思路二.代码实践 一.编写思路 定义消息队列 名字是否持久化 定义队列持久化类(持久化到 sqlite3) 构造函数(只能成功,不能失败) 如果数据库(文件)不存在则创建打开数据库打开 msg_queue_table 数据库表 插入队列移除队列将数据库中的队列恢复到内存…...

SDKMAN!软件开发工具包管理器
认识一下SDKMAN!(The Software Development Kit Manager)是您在Unix系统上轻松管理多个软件开发工具包的可靠伴侣。想象一下,有不同版本的SDK,需要一种无感知的方式在它们之间切换。SDKMAN拥有易于使用的命令行界面(CLI)和API。其…...

《使用 LangChain 进行大模型应用开发》学习笔记(四)
前言 本文是 Harrison Chase (LangChain 创建者)和吴恩达(Andrew Ng)的视频课程《LangChain for LLM Application Development》(使用 LangChain 进行大模型应用开发)的学习笔记。由于原课程为全英文视频课…...

gbase8s数据库常见的索引扫描方式
1 顺序扫描(Sequential scan):数据库服务器按照物理顺序读取表中的所有记录。 常发生在表上无索引或者数据量很少或者一些无法使用索引的sql语句中 2 索引扫描(Index scan):数据库服务器读取索引页&#…...
边缘智能-大模型架构初探
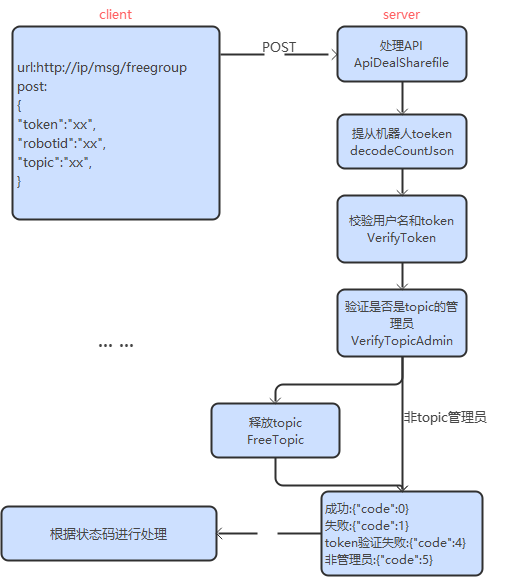
R2Cloud接口 机器人注册 请求和应答 注册是一个简单的 HTTP 接口,根据机器人/用户信息注册,创建一个新机器人。 请求 URL URLhttp://ip/robot/regTypePOSTHTTP Version1.1Content-Typeapplication/json 请求参数 Param含义Rule是否必须缺省roboti…...

《python语言程序设计》2018版第8章18题几何circle2D类(上部)
一、利用第7章的内容来做前5个点 第一章之1--从各种角度来测量第一章之2--各种结果第二章之1--建立了针对比对点在圆内的几段第二章之2--利用建立的对比代码,得出的第2点位置 第一章之1–从各种角度来测量 class Circle2D:def __init__(self, x, y, radius):self._…...

nginx upstream转发连接错误情况研究
本次测试用到3台服务器: 192.168.10.115:转发服务器A 192.168.10.209:upstream下服务器1 192.168.10.210:upstream下服务器2 1台客户端:192.168.10.112 服务器A中nginx主要配置如下: log_format main…...

alias 后门从入门到应急响应
目录 1. alias 后门介绍 2. alias 后门注入方式 2.1 方式一(以函数的方式执行) 2.2 方式二(执行python脚本) 3.应急响应 3.1 查看所有连接 3.2 通过PID查看异常连接的进程,以及该进程正在执行的命令行命令 3.3 查看别名 3.4 其他情况 3.5 那么检查这些…...

【远程调用PythonAPI-flask】
文章目录 前言一、Pycharm创建flask项目1.创建虚拟环境2.创建flask项目 二、远程调用PythonAPI——SpringBoot项目集成1.修改PyCharm的host配置2.防火墙设置3.SpringBoot远程调用PythonAPI 前言 解决Pycharm运行Flask指定ip、端口更改无效的问题 首先先创建一个新的flask项目&…...

[今日Arxiv] 思维迭代:利用内心对话进行自主大型语言模型推理
思维迭代:利用内心对话进行自主大型语言模型推理 Iteration of Thought: Leveraging Inner Dialogue for Autonomous Large Language Model Reasoning URL:https://arxiv.org/abs/2409.12618 注:翻译可能存在误差,详细内容建议…...

glTF格式:WebGL应用的3D资产优化解决方案
摘要 glTF作为一种高效的3D资产格式,为WebGL、OpenGL ES和OpenGL运行时的应用提供了强有力的支持。它不仅简化了3D模型的传输与加载流程,还通过优化资产大小,使得打包、解包更加便捷。本文将深入探讨glTF格式的优势,并提供实用的代…...

Unity3D入门(一) : 第一个Unity3D项目,实现矩形自动旋转,并导出到Android运行
1. Unity3D介绍 Unity3D是虚拟现实行业中,使用率较高的一款软件。 它有着强大的功能,是让玩家轻松创建三维视频游戏、建筑可视化、实时三维动画等互动内容的多平台、综合型 虚拟现实开发工具。是一个全面整合的专业引擎。 2. Unity安装 官网 : Unity…...
)
别再只调分辨率了!手把手教你用VESA时序搞定1080P显示器驱动(附Verilog代码)
从VESA标准到FPGA实战:构建1080P显示驱动的完整逻辑链 在数字显示技术领域,驱动一块19201080分辨率的屏幕远不止是配置几个参数那么简单。当我第一次尝试用FPGA驱动高清显示器时,发现大多数教程都停留在"设置分辨率"的层面…...

SRWE终极窗口管理指南:免费解锁Windows窗口任意调整能力
SRWE终极窗口管理指南:免费解锁Windows窗口任意调整能力 【免费下载链接】SRWE Simple Runtime Window Editor 项目地址: https://gitcode.com/gh_mirrors/sr/SRWE 你是否曾为Windows窗口管理的限制感到困扰?想要调整游戏窗口大小进行高清截图&am…...

高校食堂学生信息录入系统开发实战|从0到1搭建简易Web系统
大家好~ 最近完成了一个适合高校课程作业、小型食堂管理使用的「大学食堂学生信息录入系统」,全程用纯前端技术实现,无需复杂后端环境,双击即可运行,今天就来分享一下开发全过程、功能细节和使用技巧,适合刚…...

BiliBili-UWP:Windows 10/11 上最流畅的第三方B站客户端完全指南
BiliBili-UWP:Windows 10/11 上最流畅的第三方B站客户端完全指南 【免费下载链接】BiliBili-UWP BiliBili的UWP客户端,当然,是第三方的了 项目地址: https://gitcode.com/gh_mirrors/bi/BiliBili-UWP 还在为网页版B站卡顿和操作不便而…...

MTKClient实战指南:联发科设备深度操作与安全研究
MTKClient实战指南:联发科设备深度操作与安全研究 【免费下载链接】mtkclient MTK reverse engineering and flash tool 项目地址: https://gitcode.com/gh_mirrors/mt/mtkclient MTKClient是一款功能强大的开源工具,专门用于联发科(M…...

AMBA CHI协议Issue F更新解析与SoC设计优化
1. AMBA CHI Issue F协议更新深度解析AMBA CHI(Coherent Hub Interface)作为Arm体系结构中的关键一致性协议,在多核处理器设计中扮演着至关重要的角色。最新发布的Issue F版本对协议规范进行了多项重要修正,这些变更直接影响SoC设…...

基于Refine框架的企业级后台管理系统实战开发指南
1. 项目概述与核心价值最近在梳理企业内部后台管理系统的技术栈时,我又一次把目光投向了refine这个框架。如果你也和我一样,长期被各种业务后台的重复性开发工作所困扰——比如没完没了的增删改查(CRUD)界面、复杂的权限控制、数据…...

终点亦是起点
小端AI经过8个月的反复打磨,不仅领先外国顶级水平,而且功能稳定,我也永久保持纯本地运行100%开源,如今已超过30万下载,不管未来百万还是千万用户,绝不开会员,献给国家的申明永久有效,…...

终极CFP管理指南:developers.events如何帮助您提交演讲申请
终极CFP管理指南:developers.events如何帮助您提交演讲申请 【免费下载链接】developers-conferences-agenda developers.events is a community-driven platform listing developer/tech conferences and Calls for Papers (CFPs) worldwide with a list, a calend…...

为LibraVDB定制内存池:提升稀疏体素数据处理性能
1. 项目概述:一个为LibraVDB设计的开源内存管理库最近在搞一些基于体素的数据处理项目,特别是用到了LibraVDB这个开源的稀疏体素数据库。玩过VDB格式的朋友都知道,它的核心优势在于对稀疏体数据的极致压缩和高效访问,但这也带来了…...