相机单独标定的实现过程[autoware标定]、tmp文件的查看方式
安装了autoware1.13和calibration标定包,发现实现相机单独标定的过程较为坎坷,参考了一些博主的方法,发现下面的过程更加适合自己,做个笔记。
1安装标定箱(与calibration标定包的安装并不冲突)
标定工具箱安装教程参考:(复制下面命令百度下载即可)
https://github.com/XidianLemon/calibration_camera_lidar
把工程克隆到自己本地工程的src目录下编译即可。我本人的本地工程文件夹为catkin_ws
【注】我的ubuntu是18.04版本的,对应的ROS版本为melodic,直接编译会有一些小问题。
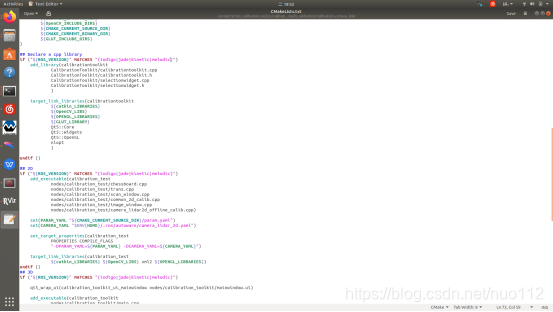
(1)此时直接运行标定程序,会报找不到可执行文件 calibration_camera_lidar的问题。因为我的系统是ubuntu18.04对应支持的ROS是melodic,因此需要对calibration_camera_lidar功能包下的CMakeLists.txt进行修改,添加ROS的melodic版本的支持,如下图所示,修改CMakeLists.txt中所有 (indigo|jade|kinetic) 为 (indigo|jade|kinetic|melodic)
此时直接运行标定程序,会报找不到可执行文件 calibration_camera_lidar的问题。因为我的系统是ubuntu18.04对应支持的ROS是melodic,因此需要对calibration_camera_lidar功能包下的CMakeLists.txt进行修改,添加ROS的melodic版本的支持,如下图所示,修改CMakeLists.txt中所有 (indigo|jade|kinetic ) 为 (indigo|jade|kinetic|melodic)
2编译
上述过程提到的编译,我直接在catkin_ws文件夹下开启终端输入下列命令
catkin_make编译一次性通过
3相机标定
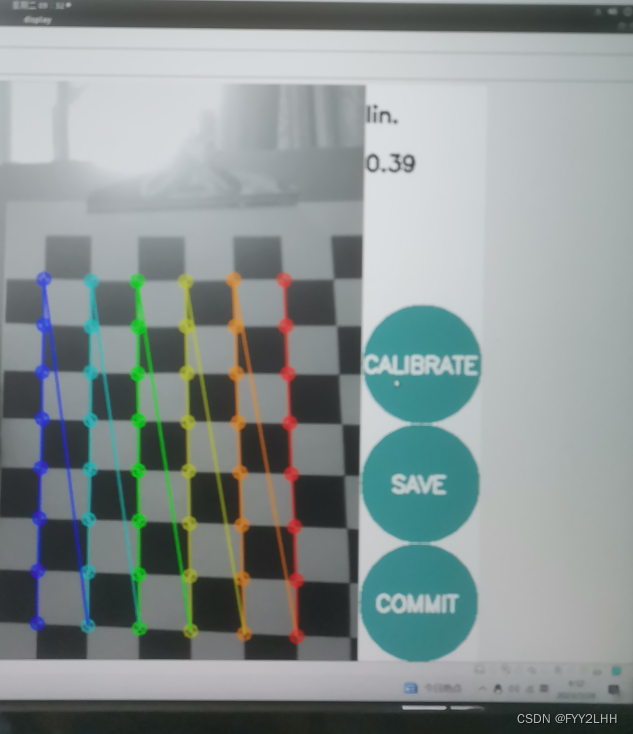
相机标定(单目--ROS方法)【下面应该是官方的命令】
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.108 image:=/usb_cam/image_raw camera:=/usb_cam这个命令是参考博主的,这里py后的命令里的数据应该是可以修改的,修改成自己所做标定板格子面积的数据。
这是我自己的命令【12×9个格子,只有11×8个角点,边长为44mm】
rosrun camera_calibration cameracalibrator.py --size 11x8 --square 0.044 image:=/usb_cam/image_raw camera:=/usb_cam
打开另一个新的终端,创建相机参数文件
下面,我们来创建一个包含相机校准参数的相机参数文件(camera.yaml)。如下例所示,解压缩calibrationdata.tar.gz文件以查看图像文件(*.png)和记录了校准中使用的校准参数的ost.txt文件。
cd /tmptar -xvzf calibrationdata.tar.gz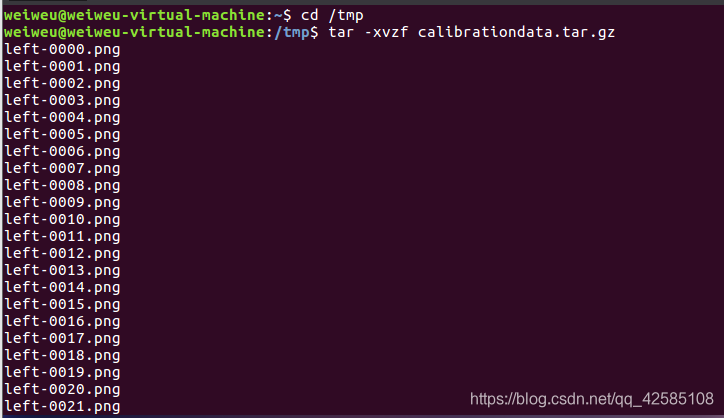
接下来,将ost.txt文件改名为ost.ini,并使用camera_calibration_parsers功能包
的convert节点创建相机参数文件(camera.yaml)。创建完成后,将其保存在~/.ros/camera_info/目录中,则ROS中使用的相机相关功能包会引用此信息。
mv ost.txt ost.ini
rosrun camera_calibration_parsers convert ost.ini camera.yaml
mkdir ~/.ros/camera_info
mv camera.yaml ~/.ros/camera_info/
接下来,将ost.txt文件改名为ost.ini,并使用camera_calibration_parsers功能包
的convert节点创建相机参数文件(camera.yaml)。创建完成后,将其保存在~/.ros/camera_info/目录中,则ROS中使用的相机相关功能包会引用此信息。
mv ost.txt ost.ini
rosrun camera_calibration_parsers convert ost.ini camera.yaml
mkdir ~/.ros/camera_info
mv camera.yaml ~/.ros/camera_info/
细节部分参考ROS摄像头标定_w²大大的博客-CSDN博客
这里存在一个问题,save保存之后我没有找到我的文件在哪里,其实他应该是存储在临时文件夹tmp中,这里我在主目录下新建了一个文件夹名为qaw
cp -r /tmp/* /home/ros/qaw
然后我用上面的命令将临时文件夹中的所有文件都复制到了这个qaw文件夹中,新文件夹的路径为
/home/ros/qaw(如果不知道文件夹的全称,可以用进入该文件夹终端pwd命令查看)
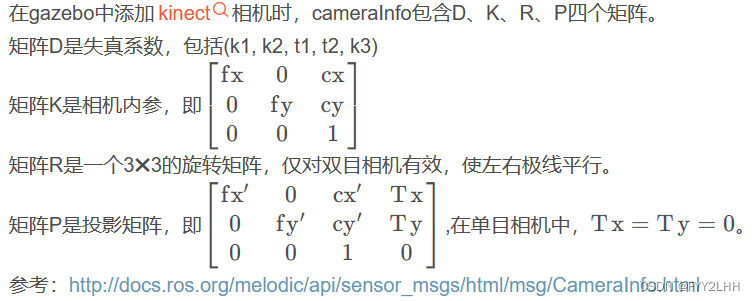
相机参数解释
参考文献
autoware 激光-相机联合标定_autoware联合标定_nuo112的博客-CSDN博客
ROS摄像头标定_w²大大的博客-CSDN博客
相关文章:
相机单独标定的实现过程[autoware标定]、tmp文件的查看方式
安装了autoware1.13和calibration标定包,发现实现相机单独标定的过程较为坎坷,参考了一些博主的方法,发现下面的过程更加适合自己,做个笔记。 1安装标定箱(与calibration标定包的安装并不冲突) 标定工具箱…...
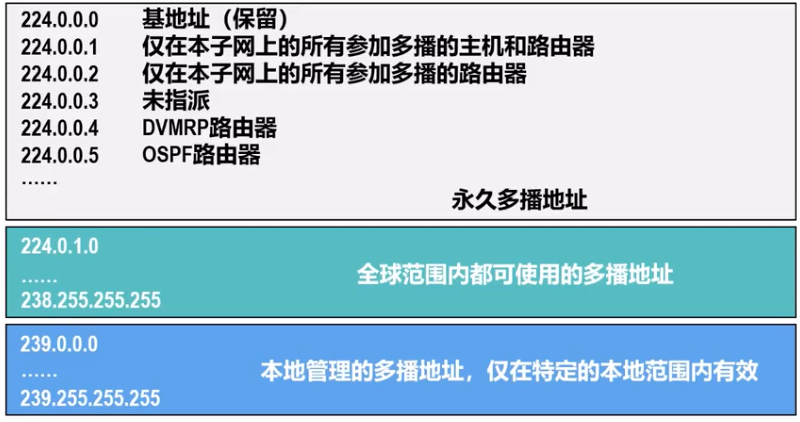
4.10.1、IP 多播技术的相关基本概念
多播(Multicast,也称为组播)是一种实现 “一对多” 通信的技术,与传统单播“一对一”通信相比,多播可以极大地节省网络资源。 在因特网上进行的多播,称为 IP 多播。 1、单播 & 多播 如下所示…...

PIGOSS BSM监控国产数据库Oscar
前言神通数据库(原OSCAR数据库)是天津神舟通用数据技术有限公司(简称“神舟通用公司”)拥有自主知识产权的企业级、大型通用关系型数据库管理系统。PIGOSS BSM作为网利友联科技完全自主研发的纯国产基础 IT 架构运行状态监测平台软件…...
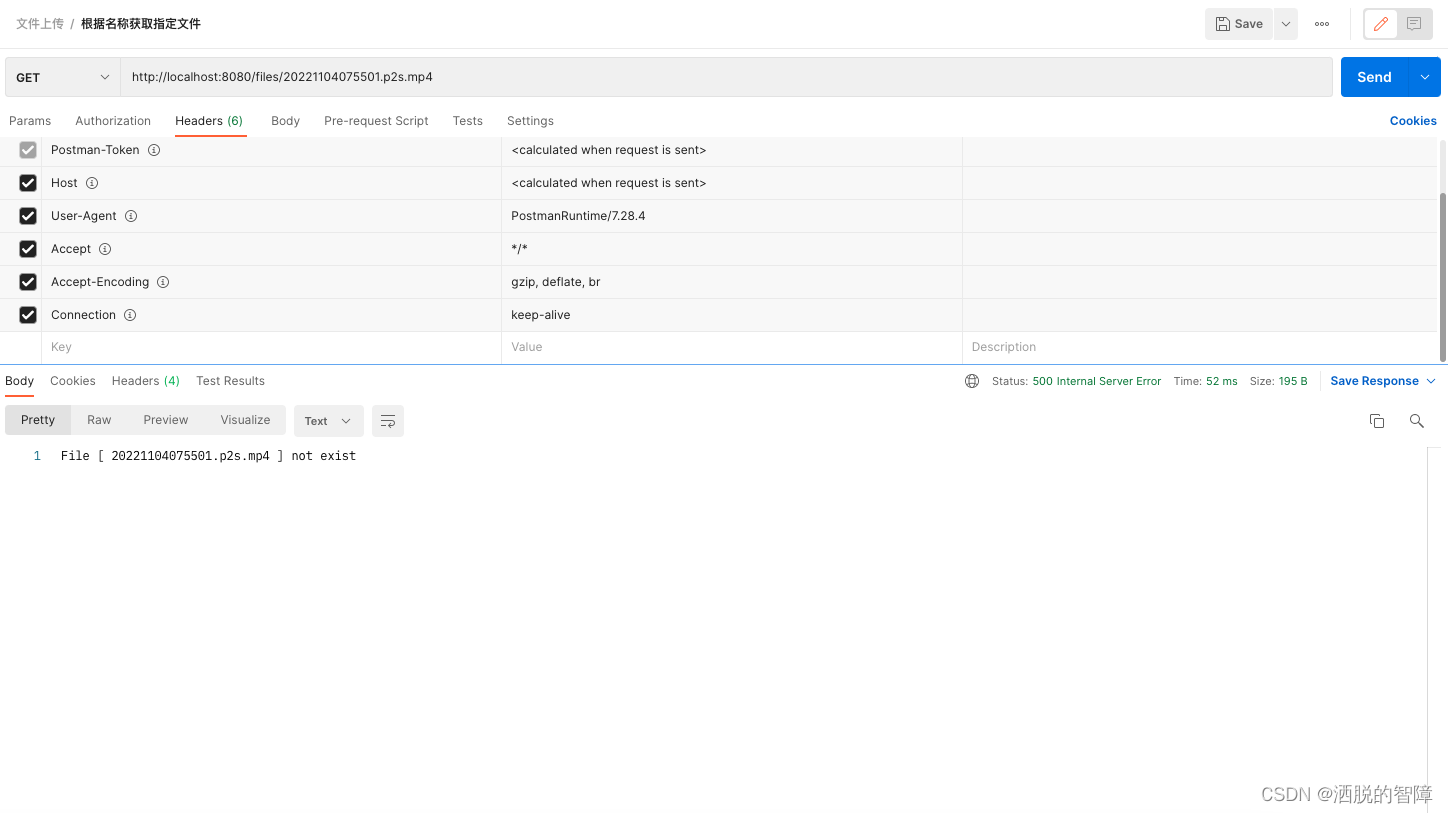
Spring Boot中文件上传
Spring Boot中文件上传 前言 本篇主要参考Spring官方文档,整理了Spring Boot中文件上传如何实现,以及在代码中使用RestTemplate和HttpClient两种方式实现文件上传。 创建Spring Boot项目 首先创建一个Spring Boot Web项目,使用的Spring B…...
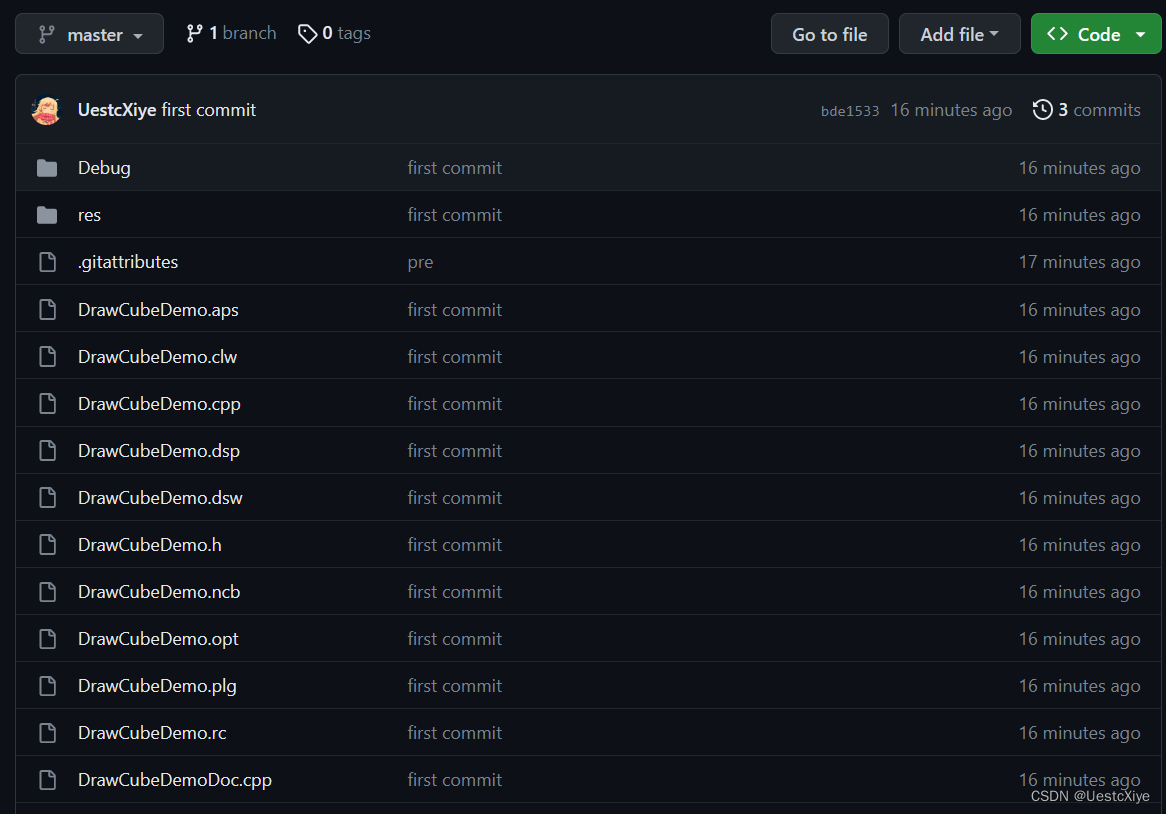
Github上传大文件(>25MB)教程
Github上传大文件(>25MB)教程Github上传大文件(>25MB)教程安装git安装Git Large File Storage实例踩坑点1:failed to push some refs to踩坑点2:main与master踩坑点3:Failed to connect t…...
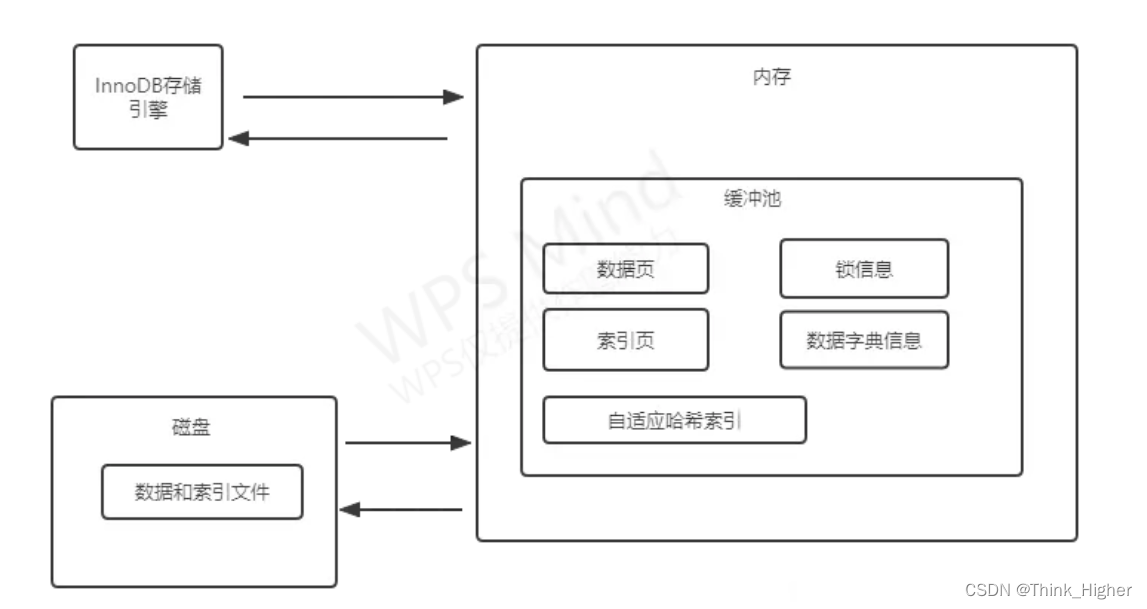
面试官:mysql索引会缓存内存吗?
文章目录 InnoDB缓冲池如何设置方法一:使用 `innodb_buffer_pool_size` 变量方法二:修改my.ini配置文件InnoDB缓冲池 InnoDB存储引擎是基于磁盘存储表文件和索引的,并将数据按页的方式管理,由于访问磁盘的速度较慢,多次访问磁盘会造成数据库性能的下降,为此,InnoDB在内…...

bs4解析数据和csv文件
\b 检测所在的位置是否是单词边界(任何可以将不同的单词进行区分的符号:空白符号,标点符号,字符串开头,字符串结尾) ^ 检测是否是字符串开头 $ 检测是否是字符串结尾 csv保存数据 什么是csv文件 读操作…...

Linux中Buffer和Cache的区别
Linux中Buffer和Cache的区别 free命令中会有一项buff/cache, 通过man free可以看到这里的关于buff/cache的介绍 buff/cache包含两部分 buffers:内核缓存区用到的内存,对应/proc/meminfo中Buffers的值 cache:内核页缓存和Slab用到的内存,对应/proc/mem…...
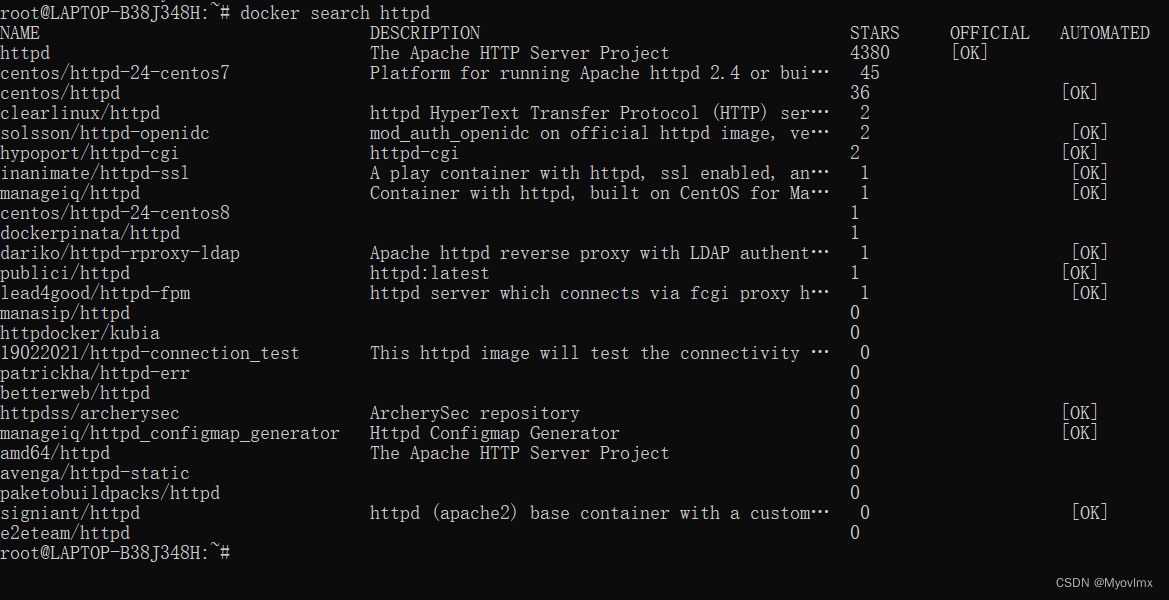
Docker 镜像使用
目录 1、列出镜像列表 2、获取一个新的镜像 3、查找镜像 4、拖取镜像 5、删除镜像 6、创建镜像 a.更新镜像 b.构建镜像 设置镜像标签 当运行容器时,使用的镜像如果在本地中不存在,docker 就会自动从 docker 镜像仓库中下载,默认是从 …...

Java阶段一Day10
Java阶段一Day10 文章目录Java阶段一Day10抽象类和抽象方法接口案例小练习引用类型数组教师总结回顾:精华笔记:笔记:补充:抽象类和抽象方法 关键字:abstract 只有方法的定义,没有具体的实现(连…...
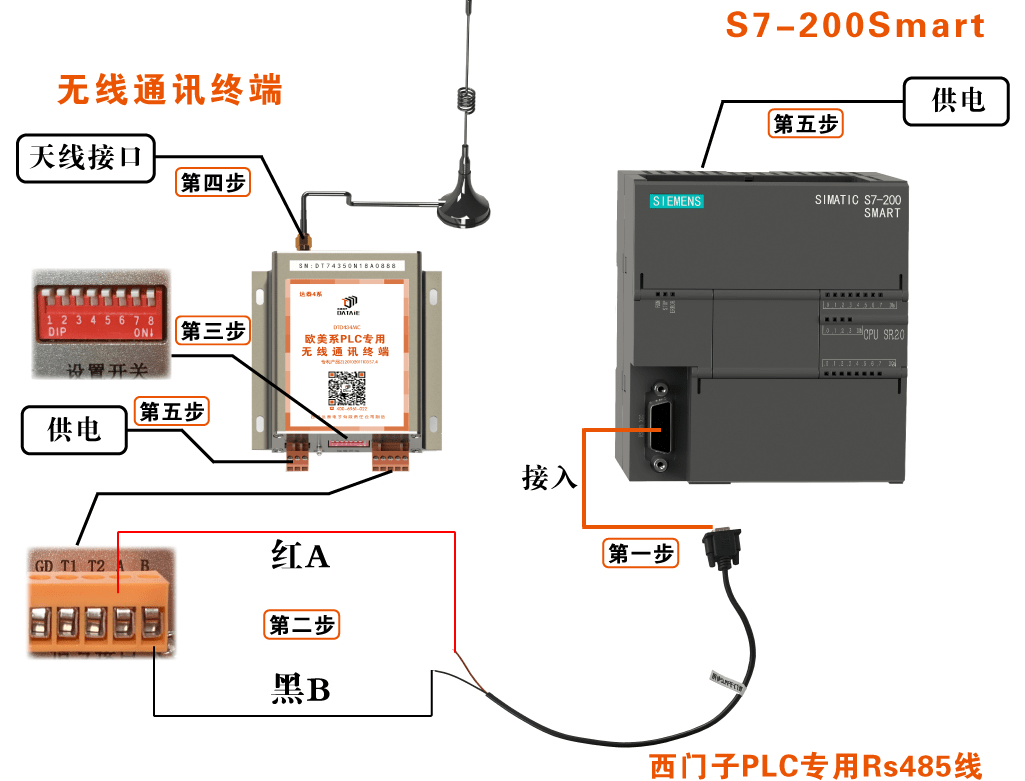
触摸屏与PLC之间如何快速实现无线PPI通信?
PPI协议是西门子为S7-200专门开发的通信协议,是不开放的协议,CPU自带的两个通信口(Port0,Port1)均支持该协议,S7-200的一些通信模块也支持PPI协议。编程软件Micro/WIN与CPU进行编程通信也使用PPI协议&#…...
)
【华为OD机试 2023最新 】 羊、狼、农夫过河(C++ 100%)
题目描述 羊、狼、农夫都在岸边,当羊的数量小于狼的数量时,狼会攻击羊,农夫则会损失羊。农夫有一艘容量固定的船,能够承载固定数量的动物。 要求求出不损失羊情况下将全部羊和狼运到对岸需要的最小次数。 只计算农夫去对岸的次数,回程时农夫不会运送羊和狼。 备注:农…...

Java中关于try、catch、finally中的细节分析
本文讲解的是关于Java中关于try、catch、finally中一些问题 下面看一个例子(例1),来讲解java里面中try、catch、finally的处理流程 public class TryCatchFinally {SuppressWarnings("finally")public static final String test(…...

Zookeeper原理
一、概念 Zookeeper是一个开源的、分布式的,为分布式应用提供协调服务的Apache项目。封装好复杂易出错的关键服务,将简单易用的接口和性能高效、功能稳定的系统提供给用户。 二、选举机制 首先是几个概念: myid:节点的唯一标识&…...

关于FPGA如何快速生成模块的例化模板(实用)
关于FPGA如何快速生成模块的例化模板(实用) 语言 :Verilg HDL 、VHDL EDA工具:ISE、Vivado、Quartus II 关于FPGA如何快速生成模块的例化模板(实用)一、引言二、快速生成例化模块的几种方法1. IP核的例化模…...
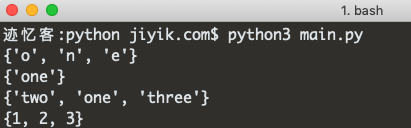
在 Python 中将字符串转换为集合
使用 set() 类将字符串转换为集合,例如 my_set set(my_str)。 set() 类将通过拆分其字符将字符串转换为集合。 my_str one# ✅ 通过拆分字符将字符串转换为集合 my_set set(my_str) print(my_set) # 👉️ {n, o, e}# -----------------------------…...
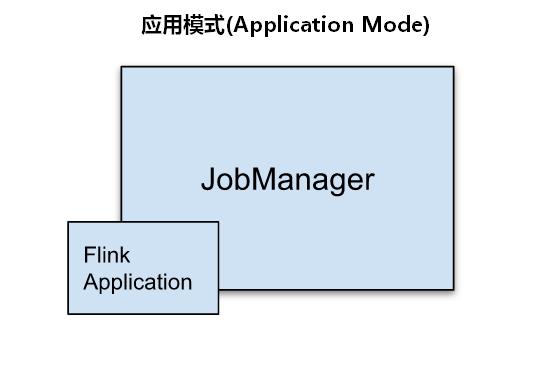
大数据Flink进阶(十三):Flink 任务提交模式
文章目录 Flink 任务提交模式 一、会话模式(Session Mode) 二、单作业模式(Per-Job Mode) 三、应用模式(Application Mode) Flink 任务提交模式 Flink分布式计算框架可以基于多种模式部署,…...

day11—编程题
文章目录1.第一题1.1题目1.2涉及的相关知识1.3思路1.4解题2.第二题2.1题目2.2思路2.3解题1.第一题 1.1题目 描述: 将一棵无穷大满二叉树的结点按根结点一层一层地从左往右编号,根结点编号为1。现给定a,b为两个结点。设计一个算法࿰…...

CentOS下安装crontab及cron表达式解析
目录安装依赖服务启停任务操作参数简要说明1、参数说明2、cron表达式解析(1)定义(2)结构(3)字段含义(4)注意事项(5)常用表达式例子crontab示例结尾安装依赖 # vixie-cron软件包是crontab的主程序 # crontabs软件包是用来安装、卸装、或列举用来驱动crontab守护进程的表格的程序…...
python 绘制训练曲线--基于Numpy.convolve曲线平均滤波
文章目录1 训练曲线--震荡的非常厉害2 基于Numpy.convolve曲线平均滤波3 python 绘制训练曲线 平滑处理--Savitzky-Golay 滤波器曲线平滑4 python 绘制训练曲线--插值法 曲线平滑处理1 训练曲线–震荡的非常厉害 上一篇文章用python自己绘制训练曲线震荡的非常厉害(…...
详解:终于搞懂管道、消息队列、共享内存到底在干什么)
Linux 进程间通信(IPC)详解:终于搞懂管道、消息队列、共享内存到底在干什么
很多人第一次学 Linux 进程间通信(IPC)时,都会有一种感觉:概念很多 API 很杂 学完还是不知道到底什么时候该用什么最容易出现的问题是:管道和消息队列有什么区别?为什么共享内存最快?信号量到底…...

别再混淆Eb/N0和SNR了!手把手教你用Python仿真验证MQAM误码率公式
别再混淆Eb/N0和SNR了!手把手教你用Python仿真验证MQAM误码率公式 在通信系统设计与性能分析中,Eb/N0(每比特能量与噪声功率谱密度之比)和SNR(信噪比)是最基础却最易混淆的概念。许多工程师在仿真MQAM系统时…...
)
【免费下载】 JIRA用户操作指南(详细版)
JIRA用户操作指南(详细版) 【下载地址】JIRA用户操作指南详细版 JIRA用户操作指南(详细版)欢迎使用JIRA用户操作指南,本指南旨在帮助您全面理解并高效地使用JIRA这一强大的问题跟踪与项目管理工具 项目地址: https:/…...

选择智能体框架:LangChain、AutoGen、CrewAI、Dify对比
去年秋天,我们团队准备上一个新项目,一个可以为客户自动生成月度运营分析报告的智能体。需求不复杂,就是每周从数据库里拉点数据,跑一下趋势分析,最后产出一个带图表和结论的PDF。 我那时候刚花了三个月时间把LangCha…...

神经网络分子动力学与长程静电模拟优化策略
1. 神经网络分子动力学与长程静电模拟的技术背景分子动力学模拟作为计算化学和材料科学的核心工具,其本质是通过数值求解牛顿运动方程来预测原子和分子的运动轨迹。传统的第一性原理分子动力学(AIMD)虽然精度高,但由于计算复杂度随…...

[A2A协议与实现-03]从Protobuf消息详解A2A协议四大核心操作
接下来我们将介绍A2A协议中定义的核心操作列表。这些操作构成了Agent之间交互的基础,每个操作都对应一个特定的功能,允许Agent以标准化的方式进行通信和协作。之前已经说过,A2A协议的所有操作定义在A2AService这个gRPC服务中。我们将逐一介绍…...

别再给Claude送钱了!7个硬核技巧让Token消耗爆降80%,我亲测有效
文章目录前言1. 杀鸡不用牛刀:根据任务复杂度切换模型,别用导弹打蚊子2. 把CLAUDE.md当“项目宪法”,别当“信息垃圾场”3. 把脏活累活交给Subagent,但别滥用4. 精准打击!明确指定文件和行号,别让Claude大海…...

2026本地视频怎么去水印?5款免费去水印软件对比和实用方法指南
很多人都遇到过这个问题:辛辛苦苦保存下来的视频、素材库里的片段,上面都贴了水印,想要二次编辑或重新发布时,这些水印就成了"眼中钉"。本地视频怎么去水印?2026年有哪些靠谱的免费去水印方法?今…...

Python网络爬虫框架xcapy实战:任务驱动与反爬对抗
1. 项目概述:一个为现代应用量身定制的网络抓取框架最近在做一个需要大规模、高频率抓取网页数据的项目,传统的爬虫框架用起来总觉得有点“水土不服”。要么是异步处理不够优雅,遇到复杂的反爬策略就手忙脚乱;要么是配置过于繁琐&…...

中国500万医生的新AI:顶刊独家联手,卷的就是证据源
金磊 发自 杭州量子位 | 公众号 QbitAI很反差。明明是一场AI的发布会,台下却坐满了医学界的大佬们:有北大、清华的,有浙江、上海的,甚至医学顶刊BMJ集团的主编都来围观了……△图片由AI生成为啥会这样?因为阿里健康正式…...