力扣416周赛
举报垃圾信息
题目
3295. 举报垃圾信息 - 力扣(LeetCode)
思路
直接模拟就好了,这题居然是中等难度
代码
public boolean reportSpam(String[] message, String[] bannedWords) {Map<String,Integer> map = new HashMap<>();for(String msg:bannedWords){map.put(msg,0);}int sum = 0;for(String msg:message){if(map.containsKey(msg)){sum++;}if(sum==2){return true;}}return false;}移山所需要的最少秒数
题目
3296. 移山所需的最少秒数 - 力扣(LeetCode)
思路
- 二分查找法:为了找到最少时间,可以考虑使用二分查找的方法。我们在 0 到 totalTime(所有工人将山的高度降为0所需的最大时间)之间进行二分查找。
- 判断是否可行:给定一个 mid 时间,我们判断是否可以在 mid 时间内将山的高度降为0。如果可以,则说明可能有更少的时间,我们可以尝试更短的时间(减少 right);否则,说明时间不够,需要增加时间(增加 left)。
- 如何判断是否可行:我们需要检查所有工人能在 mid 时间内最多能降低的高度总和。如果所有工人能在 mid 时间内降低的总高度大于或等于 mountainHeight,说明时间是可行的。
代码
public class Solution {public long minNumberOfSeconds(int mountainHeight, int[] workerTimes) {// 二分查找的左边界是0,右边界是所有工人以最快的速度降低山的高度总时间long left = 0, right = (long) workerTimes[0] * mountainHeight * (mountainHeight + 1) / 2;while (left < right) {long mid = left + (right - left) / 2;if (canReduceToZero(mountainHeight, workerTimes, mid)) {right = mid;} else {left = mid + 1;}}return left;}// 判断是否可以在给定的时间内将山的高度降低到 0private boolean canReduceToZero(int mountainHeight, int[] workerTimes, long timeLimit) {long totalHeightReduced = 0;for (int time : workerTimes) {// 二分查找可以在 timeLimit 内降低的最大高度long left = 0, right = mountainHeight;while (left < right) {long mid = left + (right - left + 1) / 2;if (time * mid * (mid + 1) / 2 <= timeLimit) {left = mid;} else {right = mid - 1;}}totalHeightReduced += left;if (totalHeightReduced >= mountainHeight) {return true;}}return totalHeightReduced >= mountainHeight;}}
总结
剩下两题没做出来,很难评,出这么难,不要命了
相关文章:

力扣416周赛
举报垃圾信息 题目 3295. 举报垃圾信息 - 力扣(LeetCode) 思路 直接模拟就好了,这题居然是中等难度 代码 public boolean reportSpam(String[] message, String[] bannedWords) {Map<String,Integer> map new HashMap<>()…...

vue 页面常用图表框架
在 Vue.js 页面中,常见的用于制作图表的框架或库有以下几种: ECharts: 官方网站: EChartsECharts 是一个功能强大、可扩展的图表库,支持多种图表类型,如柱状图、折线图、饼图等。Vue 集成: 可以使用 vue-echarts 插件,…...

spring 注解 - @PostConstruct - 用于初始化工作
PostConstruct 是 Java EE 5 中引入的一个注解,用于标注在方法上,表示该方法应该在依赖注入完成之后执行。这个注解是 javax.annotation 包的一部分,通常用于初始化工作,比如初始化成员变量或者启动一些后台任务。 在 Spring 框架…...
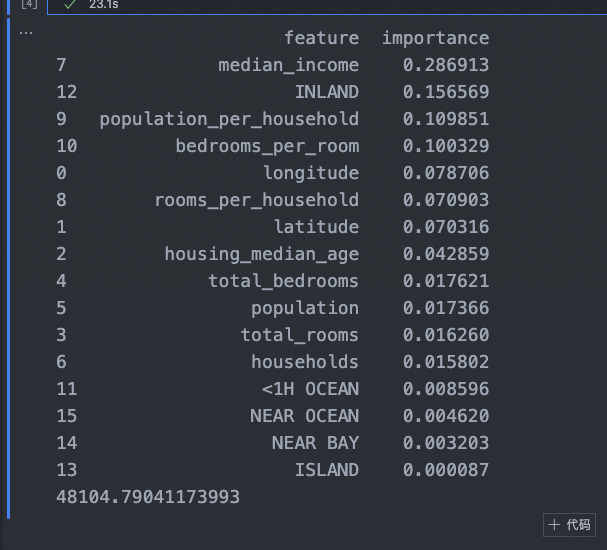
多机器学习模型学习
特征处理 import os import numpy as np import pandas as pd from sklearn.model_selection import train_test_split from sklearn.model_selection import StratifiedShuffleSplit from sklearn.impute import SimpleImputer from sklearn.pipeline import FeatureUnion fr…...

【网页设计】前言
本专栏主要记录 “网页设计” 这一课程的相关笔记。 参考资料: 黑马程序员:黑马程序员pink老师前端入门教程,零基础必看的h5(html5)css3移动端前端视频教程_哔哩哔哩_bilibili 教材:《Adobe创意大学 Dreamweaver CS6标准教材》《…...

STM32巡回研讨会总结(2024)
前言 本次ST公司可以说是推出了7大方面,几乎可以说是覆盖到了目前生活中的方方面面,下面总结下我的感受。无线类 支持多种调制模式(LoRa、(G)FSK、(G)MSK 和 BPSK)满足工业和消费物联网 (IoT) 中各种低功耗广域网 (LPWAN) 无线应…...

54 螺旋矩阵
解题思路: \qquad 这道题可以直接用模拟解决,顺时针螺旋可以分解为依次沿“右-下-左-上”四个方向的移动,每次碰到“边界”时改变方向,边界是不可到达或已经到达过的地方,会随着指针移动不断收缩。 vector<int>…...

基于STM32与OpenCV的物料搬运机械臂设计流程
一、项目概述 本文提出了一种新型的物流搬运机器人,旨在提高物流行业的物料搬运效率和准确性。该机器人结合了 PID 闭环控制算法与视觉识别技术,能够在复杂的环境中实现自主巡线与物料识别。 项目目标与用途 目标:设计一款能够自动搬运物流…...
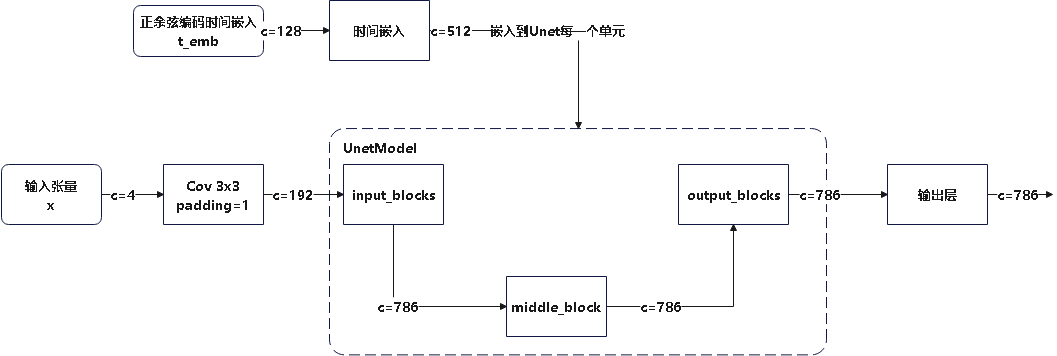
[万字长文]stable diffusion代码阅读笔记
stable diffusion代码阅读笔记 获得更好的阅读体验可以转到我的博客y0k1n0的小破站 本文参考的配置文件信息: AutoencoderKL:stable-diffusion\configs\autoencoder\autoencoder_kl_32x32x4.yaml latent-diffusion:stable-diffusion\configs\latent-diffusion\lsun_churches-ld…...

watchEffect工作原理
watchEffect工作原理 自动依赖收集:watchEffect不需要明确指定要观察的响应式数据,它会自动收集回调函数中用到的所有响应式数据作为依赖。即时执行:watchEffect的回调函数会在组件的setup()函数执行时立即执行一次,以便能够立即…...

斐波那契数列
在 Python 3.11 中实现斐波那契数列的常见方式有多种,下面我将展示几种不同的实现方法,包括递归、迭代和使用缓存(动态规划)来优化递归版本。 1. 递归方式(最简单但效率较低) def fibonacci_recursive(n)…...

TCP并发服务器的实现
一请求一线程 问题 当客户端数量较多时,使用单独线程为每个客户端处理请求可能导致系统资源的消耗过大和性能瓶颈。 资源消耗: 线程创建和管理开销:每个线程都有其创建和销毁的开销,特别是在高并发环境中,这种开销…...

前端大屏自适应方案
一般后台管理页面,需要自适应的也就是大屏这一个,其他的尺寸我感觉用第三方框架继承好的就挺合适的,当然自适应方案也可以同步到所有页面,但我感觉除了 to c 的项目,不太需要所有页面自适应,毕竟都是查看和…...

16.3 k8s容器cpu内存告警指标与资源request和limit
本节重点介绍 : Guaranteed的pod Qos最高在生产环境中,如何设置 Kubernetes 的 Limit 和 Request 对于优化应用程序和集群性能至关重要。对于 CPU,如果 pod 中服务使用 CPU 超过设置的limits,pod 不会被 kill 掉但会被限制。如果没有设置 li…...
)
【计算机网络 - 基础问题】每日 3 题(二十)
✍个人博客:Pandaconda-CSDN博客 📣专栏地址:http://t.csdnimg.cn/fYaBd 📚专栏简介:在这个专栏中,我将会分享 C 面试中常见的面试题给大家~ ❤️如果有收获的话,欢迎点赞👍收藏&…...

铰链损失函数
铰链损失函数(Hinge Loss)主要用于支持向量机(SVM)中,旨在最大化分类间隔。它的公式为: L ( y , f ( x ) ) max ( 0 , 1 − y ⋅ f ( x ) ) L(y, f(x)) \max(0, 1 - y \cdot f(x)) L(y,f(x))max(0,1−…...

项目实战bug修复
实操bug修复记录 左侧侧边栏切换,再次切换侧边栏,右侧未从顶部初始位置展示。地图定位展示,可跳转到设置的对应位置。一个页面多个el-dialog弹出框导致渲染层级出现问题。锚点滚动定位错位问题。动态类名绑定。el-tree树形通过 draggable 属性…...

Git常用指令整理【新手入门级】【by慕羽】
Git 是一个分布式版本控制系统,主要用于跟踪和管理源代码的更改。它允许多名开发者协作,同时提供了强大的功能来管理项目的历史记录和不同版本。本文主要记录和整理,个人理解的Git相关的一些指令和用法 文章目录 一、git安装 & 创建git仓…...
记某学校小程序漏洞挖掘
前言: 遇到一个学校小程序的站点,只在前端登录口做了校验,后端没有任何校验,奇葩弱口令离谱进去,站点里面越权泄露敏感信息,接管账号等漏洞!!! 渗透思路 1.绕过前端 …...
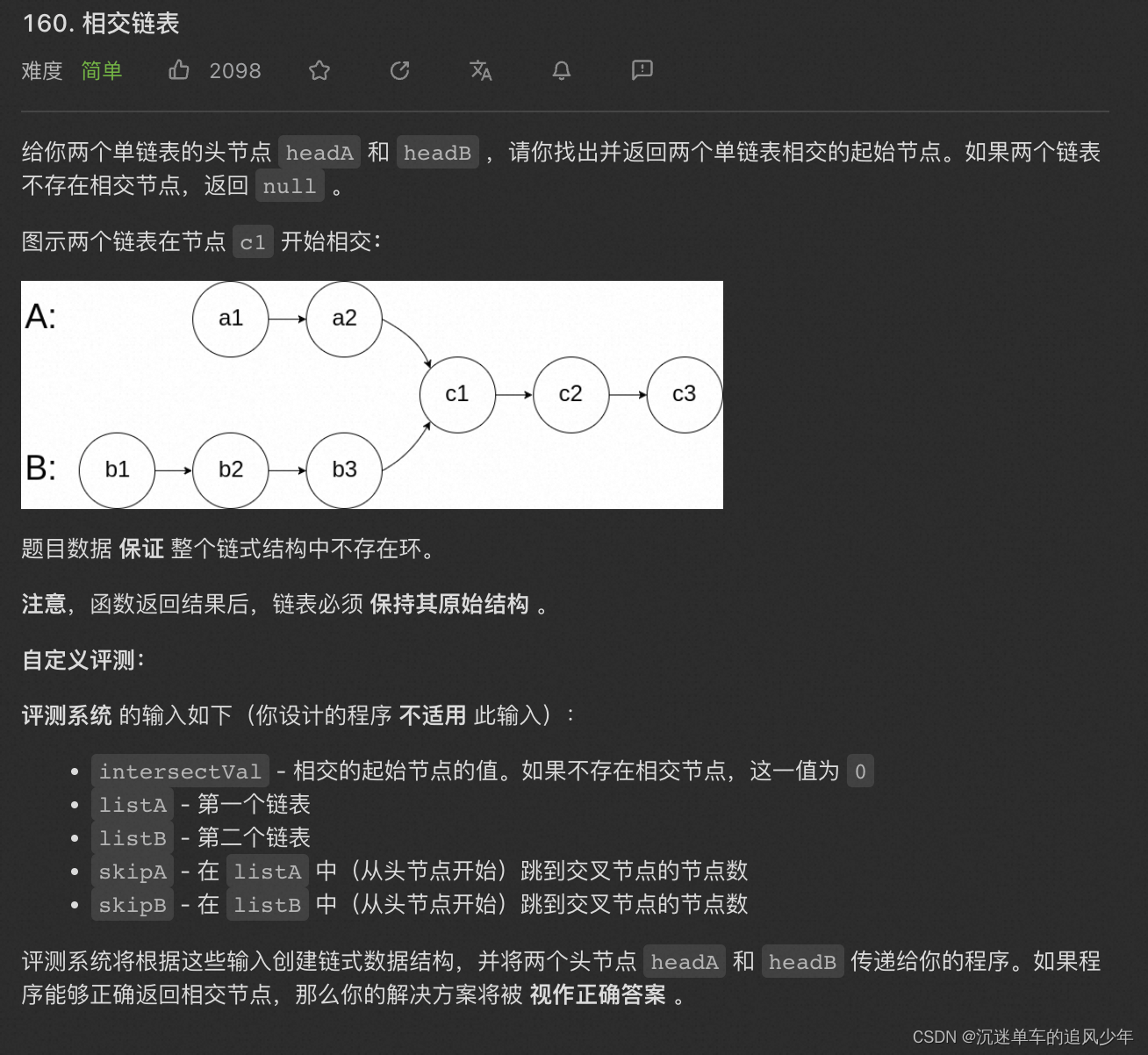
腾讯百度阿里华为常见算法面试题TOP100(3):链表、栈、特殊技巧
之前总结过字节跳动TOP50算法面试题: 字节跳动常见算法面试题top50整理_沉迷单车的追风少年-CSDN博客_字节算法面试题 链表 160.相交链表...

C++高精度算法的简单实现
一、基本原理1、存储方式采用数字记录高精度数字,数组的第一个元素存储数据长度,比如记录数字为1024示例如下:2、计算方式采用模拟立竖式计算,比如加法的计算流程,如下图所示10249000:这里只给出加法的计算…...

DIY改造:为Hakko FX-901烙铁打造USB-C充电电池包
1. 项目概述:打造你的专属USB充电无线烙铁 如果你和我一样,经常需要带着烙铁跑现场——无论是调试RC模型、在Maker Faire上修复作品,还是在户外临时搭建一个电子装置——那你一定对传统无线烙铁的痛点深有体会。四节AA电池,用不了…...
RWKV:融合RNN与Transformer优势的高效语言模型架构解析与实践
1. 项目概述:一个“非Transformer”的现代语言模型 如果你最近在关注大语言模型(LLM)的开源生态,除了那些基于Transformer架构的“巨无霸”,可能还听说过一个名字有点特别的项目: RWKV 。这个由开发者Bli…...

【YOLO目标检测全栈实战】39 多模型流水线:当YOLO遇上OCR和语音合成,如何让四个模型“共线生产”?
DIA DALI,我们把187ms的串行方案优化到15ms,性能提升12倍。但说实话,那只是两个模型之间的“小打小闹”。 今天我们要面对的,是一个真正的“四国联军”——YOLOv8检测、ResNet分类、OCR文字识别、语音合成,四个模型串联成一条生产线。 你可能会想:“不就是把四个模型串…...

超大规模内容生成技能引擎:模块化架构与工作流实践
1. 项目概述:一个面向超大规模内容生成的技能引擎最近在折腾一些自动化内容生成的项目,发现了一个挺有意思的GitHub仓库,叫smouj/ultra-generator-skill。光看这个名字,你可能会觉得有点抽象——“超生成器技能”?这到…...

MultiFunPlayer终极指南:5分钟掌握开源设备同步软件,打造沉浸式娱乐体验
MultiFunPlayer终极指南:5分钟掌握开源设备同步软件,打造沉浸式娱乐体验 【免费下载链接】MultiFunPlayer flexible application to synchronize various devices with media playback 项目地址: https://gitcode.com/gh_mirrors/mu/MultiFunPlayer …...

3大核心功能解密:HS2-HF_Patch如何让Honey Select 2游戏体验焕然一新
3大核心功能解密:HS2-HF_Patch如何让Honey Select 2游戏体验焕然一新 【免费下载链接】HS2-HF_Patch Automatically translate, uncensor and update HoneySelect2! 项目地址: https://gitcode.com/gh_mirrors/hs/HS2-HF_Patch 如果你正在玩Honey Select 2却…...

新时代的信息茧房
大家有没有发现:信息爆炸 2.0 时代,获取真知为何反而更难了? 人类正身处信息传播最为便捷的时代。移动互联网的普及与信息技术的迭代升级,让知识获取变得前所未有的低廉易得。迈入 AI 时代后,这一发展进程更是被推至全…...

如何让Windows资源管理器完美预览iPhone照片:HEIC缩略图插件全解析
如何让Windows资源管理器完美预览iPhone照片:HEIC缩略图插件全解析 【免费下载链接】windows-heic-thumbnails Enable Windows Explorer to display thumbnails for HEIC/HEIF files 项目地址: https://gitcode.com/gh_mirrors/wi/windows-heic-thumbnails 你…...

终极指南:FigmaCN中文插件让设计师告别英文障碍
终极指南:FigmaCN中文插件让设计师告别英文障碍 【免费下载链接】figmaCN 中文 Figma 插件,设计师人工翻译校验 项目地址: https://gitcode.com/gh_mirrors/fi/figmaCN 还在为Figma的全英文界面而烦恼吗?Figma中文插件FigmaCN正是为你…...