基于STM32与OpenCV的物料搬运机械臂设计流程
一、项目概述
本文提出了一种新型的物流搬运机器人,旨在提高物流行业的物料搬运效率和准确性。该机器人结合了 PID 闭环控制算法与视觉识别技术,能够在复杂的环境中实现自主巡线与物料识别。
项目目标与用途
-
目标:设计一款能够自动搬运物流物料的机器人,支持二维码、条码识别,并具备高效的抓取与放置能力。
-
用途:广泛应用于仓储管理、生产线物料搬运及物流配送等领域。
技术栈关键词
-
硬件:STM32 单片机、树莓派
-
软件:PID 控制算法、OpenCV、无线通信模块
-
传感器:红外传感器、摄像头
-
通信协议:UART、I2C、SPI
二、系统架构
在系统架构设计中,我们根据项目需求选择了合适的硬件和软件组件,以确保机器人能够高效运行。
系统架构设计
-
单片机选择:STM32F4系列,具有强大的处理能力和丰富的外设接口。
-
视觉识别:使用树莓派搭载OpenCV库进行二维码和条码识别。
-
通信协议:采用UART进行STM32与树莓派之间的通信,I2C连接传感器。
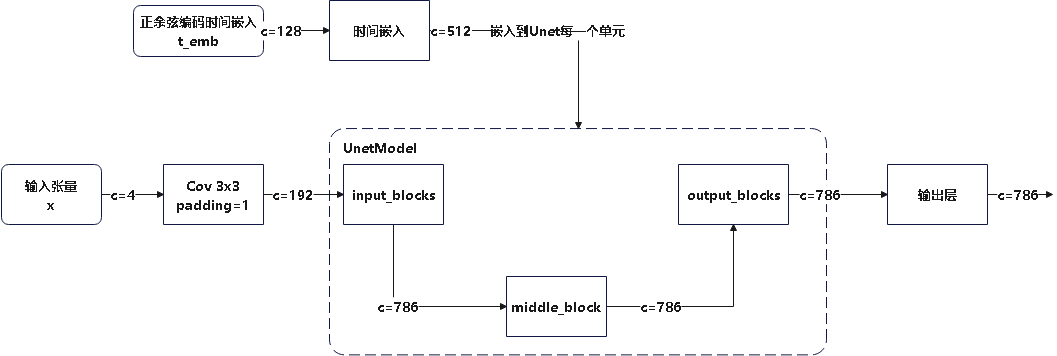
架构图
以下是系统架构图,展示了各个组件及其交互关系:
三、环境搭建和注意事项
环境搭建
-
硬件环境:准备 STM32 开发板、树莓派、传感器及电机模块。
-
软件环境:
-
安装 STM32 CubeIDE,用于开发 STM32 控制程序。
-
安装 Python 和 OpenCV 库,在树莓派上进行视觉识别开发。
注意事项
-
确保各组件之间的电源兼容性。
-
在调试阶段,逐步测试每个功能模块,避免大规模故障。
-
进行环境适应性测试,以确保机器人在不同条件下均能正常工作。
四、代码实现过程
在本项目中,我们的代码实现过程主要分为两个核心模块:PID控制模块和视觉识别模块。接下来将详细介绍这两个模块的实现过程,包括算法核心原理、代码逻辑以及时序图。
1. PID 控制模块
1.1 PID 控制算法原理
PID 控制器是一种常见的反馈控制机制,广泛应用于自动化控制系统中。其主要思想是通过对误差(当前值与目标值的差值)的实时计算,动态调整控制输出,从而达到稳定系统的目的。
PID 控制器由三部分组成:
-
比例(P):与当前误差成正比的控制项,能够快速反应变化。
-
积分(I):累积过去的误差,消除静态误差。
-
微分(D):预测未来的误差,抑制系统的超调。
1.2 PID 控制模块代码实现
以下是 PID 控制模块的完整代码实现,包括初始化、计算等功能。
#include "stm32f4xx_hal.h"// PID结构体定义
typedef struct {float Kp; // 比例系数float Ki; // 积分系数float Kd; // 微分系数float setpoint; // 目标值float input; // 当前值float output; // 控制输出float last_input; // 上一个输入值float integral; // 积分值
} PID;// PID初始化函数
void PID_Init(PID *pid, float Kp, float Ki, float Kd) {pid->Kp = Kp;pid->Ki = Ki;pid->Kd = Kd;pid->integral = 0;pid->last_input = 0;
}// PID计算函数
void PID_Compute(PID *pid) {float error = pid->setpoint - pid->input; // 计算当前误差pid->integral += error; // 计算积分项if (pid->integral > 100) { // 积分限幅pid->integral = 100;} else if (pid->integral < -100) {pid->integral = -100;}float derivative = pid->input - pid->last_input; // 计算微分项pid->output = pid->Kp * error + pid->Ki * pid->integral - pid->Kd * derivative; // 计算控制输出pid->last_input = pid->input; // 更新上一个输入
}// 示例:在主循环中使用PID控制
void main_loop() {PID pid;PID_Init(&pid, 2.0, 0.5, 1.0); // 初始化PID参数while (1) {pid.input = read_sensor(); // 读取传感器数据pid.setpoint = 100; // 设定目标值PID_Compute(&pid); // 计算控制输出control_motor(pid.output); // 控制电机HAL_Delay(100); // 延时以稳定控制}
}
1.3 PID 控制流程图
以下是 PID 控制的时序图,清晰展示了控制流程:
2. 视觉识别模块
2.1 视觉识别算法原理
在本项目中,我们使用 OpenCV 库实现二维码和条形码的识别。二维码是一种图形编码,可存储大量信息,因此在物流管理中被广泛应用。基本的识别流程如下:
-
图像获取:通过摄像头获取实时图像。
-
图像处理:对图像进行灰度化和二值化处理,以提高识别精度。
-
二维码检测与解码:使用 OpenCV 的 QRCodeDetector 类进行检测和解码。
2.2 视觉识别模块代码实现
以下是视觉识别模块的完整代码实现,包含图像获取、处理和二维码识别功能。
import cv2def recognize_qr_code(frame):# 创建 QRCodeDetector 对象detector = cv2.QRCodeDetector()# 检测和解码二维码data, bbox, _ = detector(frame)# 如果检测到二维码,返回数据if bbox is not None:return datareturn Nonedef capture_video():# 捕获视频流cap = cv2.VideoCapture(0) # 0 表示默认摄像头while True:ret, frame = cap.read() # 读取视频帧if not ret:break# 调用识别函数qr_data = recognize_qr_code(frame)if qr_data:print("识别到二维码:", qr_data) # 输出识别到的数据# 处理识别到的数据(如发送给MCU或进行后续操作)# send_data_to_mcu(qr_data)# 显示摄像头画面cv2.imshow("QR Code Scanner", frame)# 按 'q' 键退出if cv2.waitKey(1) & 0xFF == ord('q'):break# 释放摄像头资源cap.release()cv2.destroyAllWindows()if __name__ == "__main__":capture_video()
2.3 代码实现流程说明
-
图像捕获:
-
使用
cv2.VideoCapture(0)初始化摄像头,0 表示默认摄像头。 -
通过
cap.read()读取视频流中的每一帧。
-
-
二维码识别:
-
创建
QRCodeDetector对象,并使用detector(frame)方法对当前帧进行识别。 -
如果检测到二维码,则返回解码后的数据;否则返回
None。
-
-
数据处理:
- 在识别到二维码后,可以将数据发送至 STM32 控制单元,进行后续的操作(如控制机械手抓取物料)。
-
视频显示:
-
使用
cv2.imshow()显示摄像头画面,便于实时观察识别效果。 -
按下 ‘q’ 键可以退出程序。
-
2.4 视觉识别流程图
以下是视觉识别的时序图,展示了识别流程:
3. 机械手控制模块
在机器人结构部分,我们实现了五自由度铰接式机械手,确保能够进行三维抓取。该模块的控制逻辑包括对电机的控制信号发送,以及对抓取物体的识别和定位。
3.1 机械手控制代码示例
#include "stm32f4xx_hal.h"// 机械手电机控制引脚
#define MOTOR1_PIN GPIO_PIN_0
#define MOTOR2_PIN GPIO_PIN_1
#define MOTOR3_PIN GPIO_PIN_2
#define GRIPPER_PIN GPIO_PIN_3 // 夹爪控制引脚// 控制机械手的函数
void Control_Gripper(int motor1_pos, int motor2_pos, int motor3_pos, int gripper_state) {// 根据目标位置控制电机__HAL_GPIO_WritePin(GPIOA, MOTOR1_PIN, motor1_pos); // 控制电机1__HAL_GPIO_WritePin(GPIOA, MOTOR2_PIN, motor2_pos); // 控制电机2__HAL_GPIO_WritePin(GPIOA, MOTOR3_PIN, motor3_pos); // 控制电机3// 控制夹爪打开或关闭if (gripper_state == 1) {__HAL_GPIO_WritePin(GPIOA, GRIPPER_PIN, GPIO_PIN_SET); // 闭合夹爪} else {__HAL_GPIO_WritePin(GPIOA, GRIPPER_PIN, GPIO_PIN_RESET); // 打开夹爪}
}// 示例:在主循环中控制机械手抓取动作
void main_loop() {while (1) {// 假设我们已经识别到目标物体,获取其位置int target_position[3] = {1, 1, 1}; // 设置目标位置(示例值)// 控制机械手移动到目标位置Control_Gripper(target_position[0], target_position[1], target_position[2], 1); // 闭合夹爪HAL_Delay(1000); // 等待一段时间以确保抓取完成Control_Gripper(target_position[0], target_position[1], target_position[2], 0); // 打开夹爪放置物体HAL_Delay(1000); // 等待一段时间以确保放置完成}
}
3.2 代码实现流程说明
- 电机控制:
-
使用
__HAL_GPIO_WritePin()函数控制电机的状态,通过改变引脚的电平来启动或停止电机。 -
motor1_pos、motor2_pos和motor3_pos分别控制机械手的三个电机位置。
- 夹爪控制:
-
夹爪的控制状态由
gripper_state参数决定,1表示闭合夹爪,0表示打开夹爪。 -
控制夹爪的引脚
GRIPPER_PIN通过 GPIO 操作来实现。
- 主循环中的控制:
-
假设已经识别到目标物体的位置,使用
target_position数组来指定机械手的目标位置。 -
通过调用
Control_Gripper()函数实现移动、抓取和放置的动作,并在每个动作之间添加延时以确保操作的顺利进行。
3.3 机械手控制流程图
以下是机械手控制的时序图,展示了机械手的抓取和放置流程:
五、项目总结
本项目成功设计并实现了一款基于STM32和树莓派的物流搬运机器人,结合了PID闭环控制算法与视觉识别技术,能够实现实时巡线、二维码和条形码识别,以及灵活的三维抓取。通过这些功能,机器人显著提升了物流物料搬运的效率和准确性。项目过程中,我们克服了路径跟踪、物料识别及抓取可靠性等技术挑战,未来我们计划优化控制算法、增强视觉识别能力,并探索多机器人协同作业,以进一步提升系统的智能化水平和适应性。
相关文章:

基于STM32与OpenCV的物料搬运机械臂设计流程
一、项目概述 本文提出了一种新型的物流搬运机器人,旨在提高物流行业的物料搬运效率和准确性。该机器人结合了 PID 闭环控制算法与视觉识别技术,能够在复杂的环境中实现自主巡线与物料识别。 项目目标与用途 目标:设计一款能够自动搬运物流…...
[万字长文]stable diffusion代码阅读笔记
stable diffusion代码阅读笔记 获得更好的阅读体验可以转到我的博客y0k1n0的小破站 本文参考的配置文件信息: AutoencoderKL:stable-diffusion\configs\autoencoder\autoencoder_kl_32x32x4.yaml latent-diffusion:stable-diffusion\configs\latent-diffusion\lsun_churches-ld…...

watchEffect工作原理
watchEffect工作原理 自动依赖收集:watchEffect不需要明确指定要观察的响应式数据,它会自动收集回调函数中用到的所有响应式数据作为依赖。即时执行:watchEffect的回调函数会在组件的setup()函数执行时立即执行一次,以便能够立即…...

斐波那契数列
在 Python 3.11 中实现斐波那契数列的常见方式有多种,下面我将展示几种不同的实现方法,包括递归、迭代和使用缓存(动态规划)来优化递归版本。 1. 递归方式(最简单但效率较低) def fibonacci_recursive(n)…...

TCP并发服务器的实现
一请求一线程 问题 当客户端数量较多时,使用单独线程为每个客户端处理请求可能导致系统资源的消耗过大和性能瓶颈。 资源消耗: 线程创建和管理开销:每个线程都有其创建和销毁的开销,特别是在高并发环境中,这种开销…...

前端大屏自适应方案
一般后台管理页面,需要自适应的也就是大屏这一个,其他的尺寸我感觉用第三方框架继承好的就挺合适的,当然自适应方案也可以同步到所有页面,但我感觉除了 to c 的项目,不太需要所有页面自适应,毕竟都是查看和…...

16.3 k8s容器cpu内存告警指标与资源request和limit
本节重点介绍 : Guaranteed的pod Qos最高在生产环境中,如何设置 Kubernetes 的 Limit 和 Request 对于优化应用程序和集群性能至关重要。对于 CPU,如果 pod 中服务使用 CPU 超过设置的limits,pod 不会被 kill 掉但会被限制。如果没有设置 li…...
)
【计算机网络 - 基础问题】每日 3 题(二十)
✍个人博客:Pandaconda-CSDN博客 📣专栏地址:http://t.csdnimg.cn/fYaBd 📚专栏简介:在这个专栏中,我将会分享 C 面试中常见的面试题给大家~ ❤️如果有收获的话,欢迎点赞👍收藏&…...

铰链损失函数
铰链损失函数(Hinge Loss)主要用于支持向量机(SVM)中,旨在最大化分类间隔。它的公式为: L ( y , f ( x ) ) max ( 0 , 1 − y ⋅ f ( x ) ) L(y, f(x)) \max(0, 1 - y \cdot f(x)) L(y,f(x))max(0,1−…...

项目实战bug修复
实操bug修复记录 左侧侧边栏切换,再次切换侧边栏,右侧未从顶部初始位置展示。地图定位展示,可跳转到设置的对应位置。一个页面多个el-dialog弹出框导致渲染层级出现问题。锚点滚动定位错位问题。动态类名绑定。el-tree树形通过 draggable 属性…...

Git常用指令整理【新手入门级】【by慕羽】
Git 是一个分布式版本控制系统,主要用于跟踪和管理源代码的更改。它允许多名开发者协作,同时提供了强大的功能来管理项目的历史记录和不同版本。本文主要记录和整理,个人理解的Git相关的一些指令和用法 文章目录 一、git安装 & 创建git仓…...
记某学校小程序漏洞挖掘
前言: 遇到一个学校小程序的站点,只在前端登录口做了校验,后端没有任何校验,奇葩弱口令离谱进去,站点里面越权泄露敏感信息,接管账号等漏洞!!! 渗透思路 1.绕过前端 …...
腾讯百度阿里华为常见算法面试题TOP100(3):链表、栈、特殊技巧
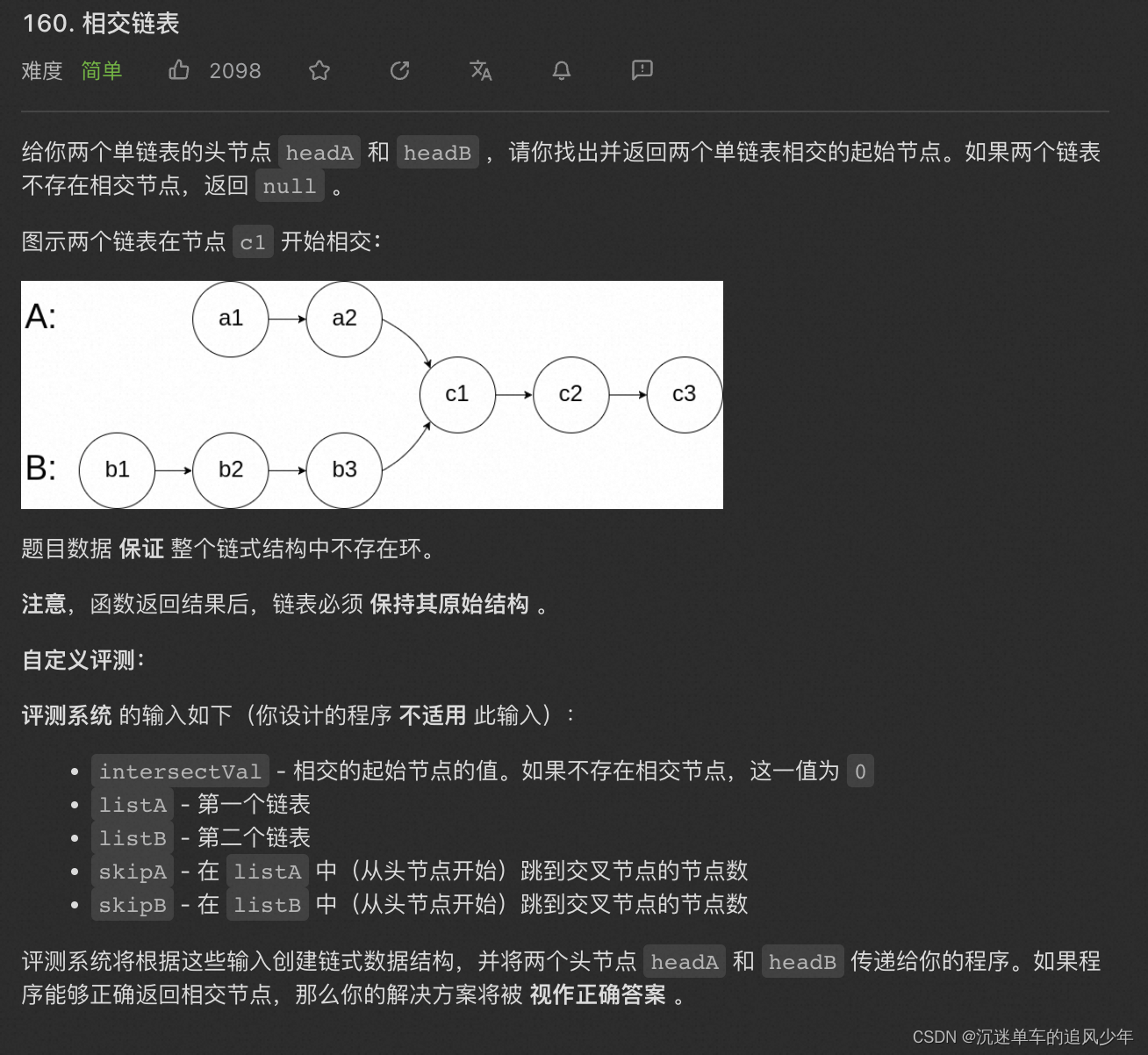
之前总结过字节跳动TOP50算法面试题: 字节跳动常见算法面试题top50整理_沉迷单车的追风少年-CSDN博客_字节算法面试题 链表 160.相交链表...

Apache CVE-2021-41773 漏洞复现
1.打开环境 docker pull blueteamsteve/cve-2021-41773:no-cgid docker run -d -p 8080:80 97308de4753d 2.访问靶场 3.使用poc curl http://47.121.191.208:8080/cgi-bin/.%2e/.%2e/.%2e/.%2e/etc/passwd 4.工具验证...
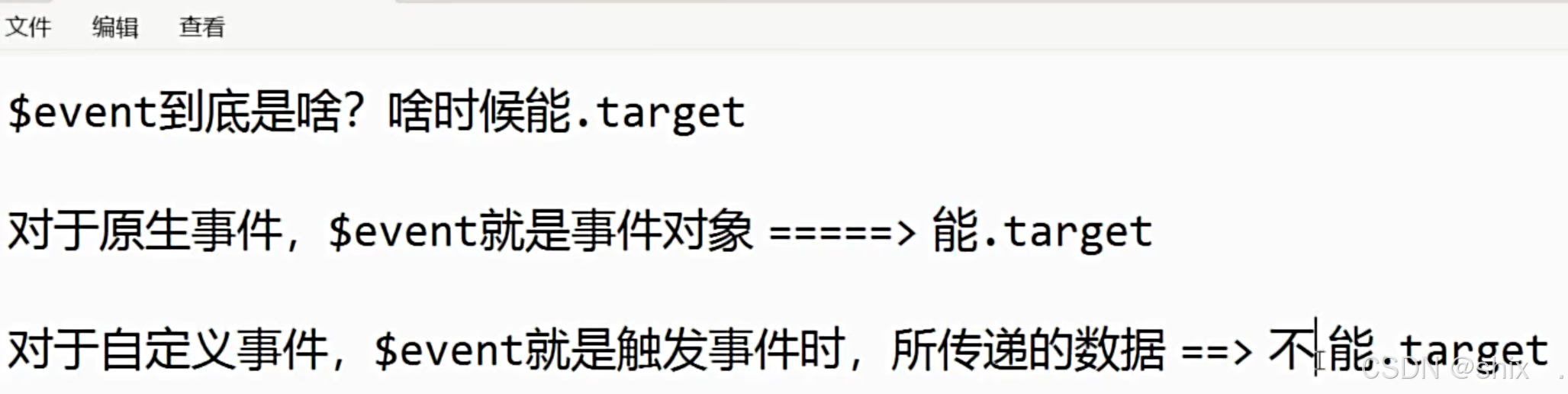
vue-入门速通
setup是最早的生命周期,在vue2里边的data域可以使用this调用setup里面的数据,但是在setup里边不能使用thisvue项目的可执行文件是index,另外运行前端需要npm run vue的三个模块内需要三个不同的结构,里边放置js代码,注…...

【AI大模型】通义大模型API接口实现
目录 一、基础环境安装 (一)OpenAI Python SDK安装 (二)DashScope SDK安装 二、OPENAI接口实现 (一)文本输入 (二)流式输出 (三)图像输入 ࿰…...
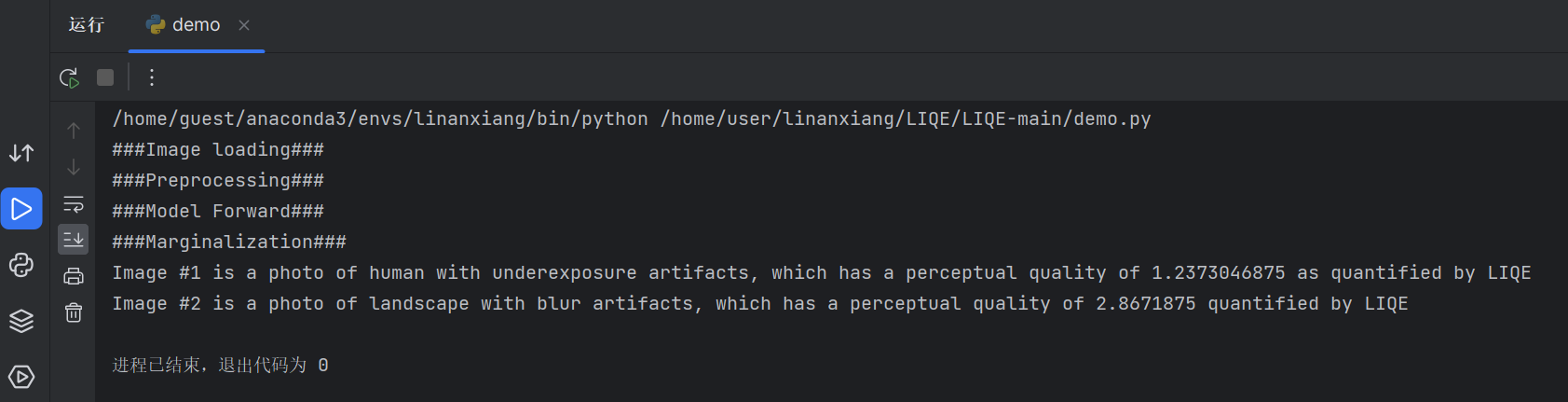
CVPR最牛图像评价算法!
本文所涉及所有资源均在 传知代码平台可获取。 目录 概述 一、论文思路 1.多任务学习框架: 2.视觉-语言对应关系: 3.动态损失权重: 4.模型优化和评估: 二、模型介绍 三、详细实现方法 1.图像编码器和语言编码器(Image…...
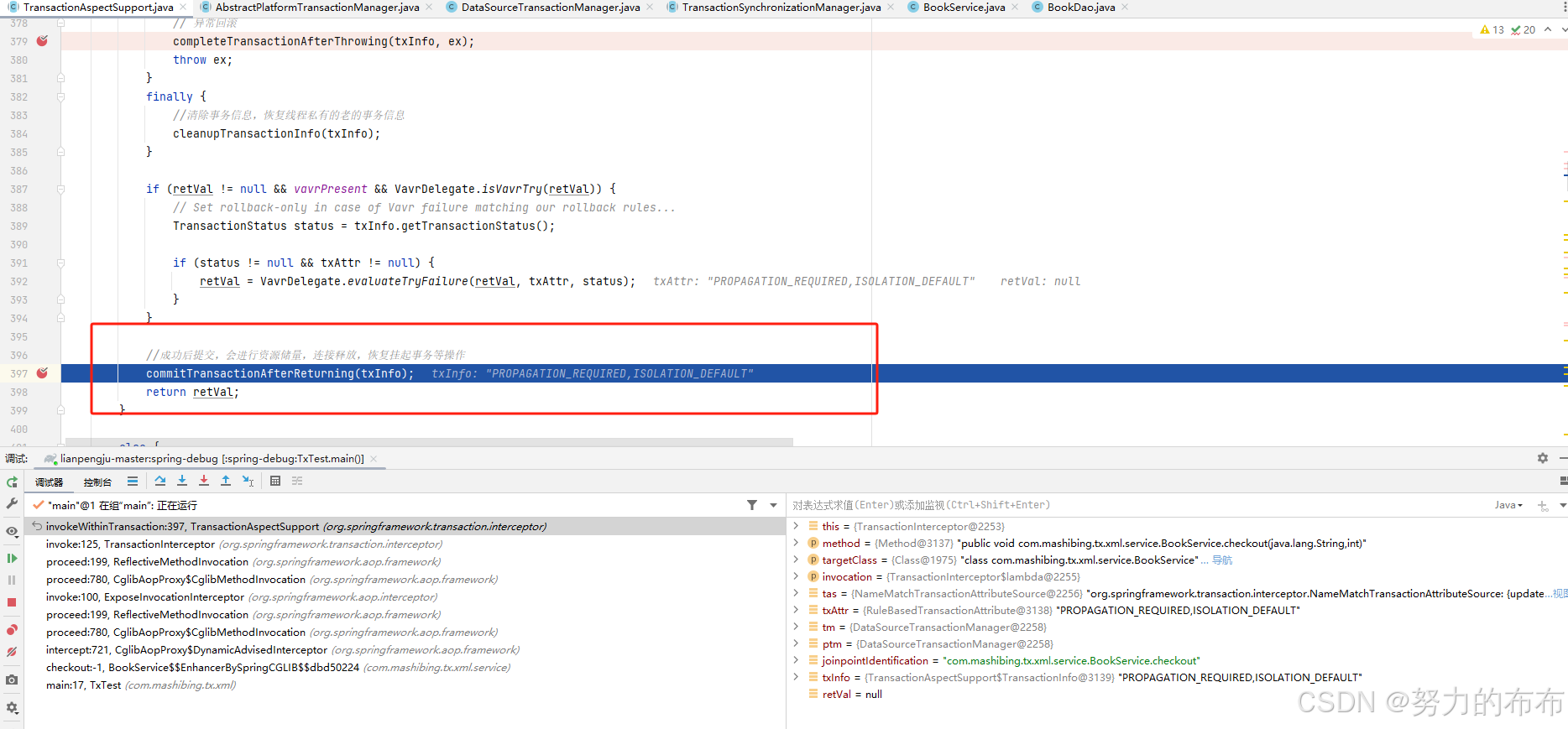
Spring源码-从源码层面讲解传播特性
传播特性:service:REQUIRED,dao:REQUIRED 两个都是required使用的是同一个事务,正常情况,在service提交commit <tx:advice id"myAdvice" transaction-manager"transactionManager"><tx:attributes&…...

Rust调用tree-sitter解析C语言
文章目录 一、Rust 调用 tree-sitter 解析 C 语言代码1. 设置 Rust 项目2. 添加 tree-sitter 依赖3. 编写 Rust 代码4. 运行程序5. 编译出错 二、解决步骤1. 添加 tree-sitter 构建依赖2. 添加 tree-sitter-c 源代码3. 修改 build.rs 以编译 tree-sitter-c 库4. 修改 Cargo.tom…...

奇瑞汽车—经纬恒润 供应链技术共创交流日 成功举办
2024年9月12日,奇瑞汽车—经纬恒润技术交流日在安徽省芜湖市奇瑞总部成功举办。此次盛会标志着经纬恒润与奇瑞汽车再次携手,深入探索汽车智能化新技术的前沿趋势,共同开启面向未来的价值服务与产品新篇章。 面对全球汽车智能化浪潮与产业变革…...

AI行业的“新风口”:大模型时代下AI从业者的职业新机遇
在AI大模型技术飞速发展的当下,全球AI市场规模正以惊人速度扩张。据IDC预测,2025年全球AI大模型市场规模突破1200亿美元,中国占比超35%。这股浪潮不仅重塑了软件开发行业格局,也为软件测试从业者带来了前所未有的职业新机遇。对于…...

探索DeepMosaics:当AI遇见图像隐私保护与修复的艺术
探索DeepMosaics:当AI遇见图像隐私保护与修复的艺术 【免费下载链接】DeepMosaics Automatically remove the mosaics in images and videos, or add mosaics to them. 项目地址: https://gitcode.com/gh_mirrors/de/DeepMosaics 在数字内容创作与分享日益普…...

Cursor对话历史导出扩展:基于DOM逆向的AI协作数据备份方案
1. 项目概述:一个为开发者解放生产力的“数据保险箱”如果你和我一样,日常重度依赖 Cursor 这款 AI 编程神器,那你一定有过这样的焦虑:那些与 AI 深度对话产生的宝贵上下文、精心调教出的项目特定提示词、甚至是 AI 帮你重构的代码…...

告别臃肿软件!OmenSuperHub:惠普暗影精灵的纯净硬件控制神器
告别臃肿软件!OmenSuperHub:惠普暗影精灵的纯净硬件控制神器 【免费下载链接】OmenSuperHub 使用 WMI BIOS控制性能和风扇速度,自动解除DB功耗限制。 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 厌倦了官方Omen Gamin…...

网络安全5大高薪赛道,哪条是你的职业快车道?
1. 政企安全:国家队的黄金赛道 政企安全领域就像网络安全行业的"公务员体系",稳定性和薪资待遇都处于行业头部水平。我接触过不少从互联网公司转行做政企安全的工程师,他们普遍反馈"虽然加班也不少,但项目预算充足…...

AzurLaneAutoScript:碧蓝航线玩家的终极自动刷图解决方案
AzurLaneAutoScript:碧蓝航线玩家的终极自动刷图解决方案 【免费下载链接】AzurLaneAutoScript Azur Lane bot (CN/EN/JP/TW) 碧蓝航线脚本 | 无缝委托科研,全自动大世界 项目地址: https://gitcode.com/gh_mirrors/az/AzurLaneAutoScript 还在为…...

卡片里放图片?用 memory:// 协议才是正确打开方式
文章目录卡片图片的限制项目结构卡片 UI:用 memory:// 显示图片FormAbility:下载图片 → 写入共享内存 → 推送更新显示本地图片(无需下载)memory:// 协议原理关键注意事项写在最后卡片里显示图片这件事比我想象的要麻烦一点。卡片…...

英特尔马来西亚六厂布局:先进封装如何重塑半导体制造与供应链
1. 项目概述:从一则新闻到半导体制造的全球拼图前几天,行业里不少朋友都在转一条消息,说英特尔在马来西亚的封装产能布局又有新动作,计划要搞到六座工厂的规模。乍一看,这好像就是个普通的海外建厂新闻,但如…...

PyInstaller Extractor终极指南:5分钟学会提取可执行文件源码
PyInstaller Extractor终极指南:5分钟学会提取可执行文件源码 【免费下载链接】pyinstxtractor PyInstaller Extractor 项目地址: https://gitcode.com/gh_mirrors/py/pyinstxtractor 你是否曾经面对一个PyInstaller打包的可执行文件,想要查看其中…...

对比直接使用厂商API,Taotoken在计费透明与用量观测上的优势
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接使用厂商API,Taotoken在计费透明与用量观测上的优势 当个人开发者或小型团队开始将大模型能力集成到自己的项目…...