【UE5】将2D切片图渲染为体积纹理,最终实现使用RT实时绘制体积纹理【第四篇-着色器投影-接收阴影部分】
上一章中实现了体积渲染的光照与自阴影,那我们这篇来实现投影
回顾
勘误
在开始本篇内容之前,我已经对上一章中的内容的错误进行了修改。为了确保不会错过这些更正,同时也避免大家重新阅读一遍,我将在这里为大家演示一下修改的具体内容。
- 错误连接:在之前的文章里,
SkyLightEnvMapSample错误地连接到了“光源方向”。 - 正确连接:实际上,需要沿垂直方向
(0,0,-1)进行采样,这样才能与 SkyAtmosphere 的结果保持一致。

(图为SkyLightEnvMapSample正确的输入)
扩展:
快速的制作一个左右分屏,对比一下两者:
在材质编辑器没有SkyAtmosphere,因此左侧没有环境光:
在场景中,可以看到左右两侧的天光是基本一致的:



准备工作:整理和完善
再开始本章工作前,先对我们的凌乱的Shader做一次整理和完善吧!
整理
整理Freams
首先我们正式将XYFrames拆成两个参数,因为怕有人忘记这是一个float2值

我们有一段时间不会再见到他们了,把他们 折叠到节点 ,收纳起来

起个名改个引脚,后续的相同操作就不多说明了

整理Base
本章中还需要修改这里,所以先不打包
但我们把Density移动到LightVecor上方

| 之前 | 之后 |
|---|---|
 |  |
Tip:
在这里拖动

Tip:
小懒蛋们,在文章最后展示全部代码的分,完整的输入节点的"快速粘贴"
完善光照输入
在上一章中介绍了多种对环境光照的取值方式,我们现在为他们制作切换函数
1.整理输入
调整位置,将LightVector LightColor SkyColor 三个相关输入摆放在一起:
(图中演示的是不基于SkyAtmosphere,都做相同操作)
| 之前 | 之后 |
|---|---|
 |  |
2.制作函数

将它们折叠到函数,起名VolumeLight
(如果你使用的是早期UE5版本,则需要手动创建材质函数)

为其增加Input ,输入类型为StaticBool,三个输入分别命名为
UseSkyAtmosphere CustomLightVector CustomColor

我们可以使用一个小技巧,在材质中创建一个“结构体”,然后通过Switch节点进行切换,从而减少Switch节点的数量。
现在,我们已经制作了一个函数,使其可以在几种方式之间进行切换。
需要特别说明的是,实际传递的内容与MaterialAttributes节点使用的名字无关。例如,在全局位置偏移中实际放置的是LightVector。




上面这几张整体截图中,Input的输入类型是
Bool,但应该像第一张图一样是StaticBool
归一化
为了出于对转换结果的安全考虑,这里增加一个归一化

世界空间LightVectorWS
我们保留一个未转换为本地空间的光照方向作为输出,稍后会用到

Tip:为了避免造成误解,需要再次说明,实际传递的内容与
MaterialAttributes节点上使用的名字无关。例如,在全局位置偏移中,实际放置的是LightVector。只是将它作为"结构体"使用。
完成后是这个样子


3.整理SelfShadow
好现在我么可以整理剩下的东西了

如上图,直接折叠,改好名即可

清爽啦
现在已经把环境整理妥当,那就开始本章内容吧!
制作Shader
简单的概述
接下来的阴影效果会将着色器的复杂度提升一大截。
需要注意的是,着色器讲究的是“看上去对的”就是“对的”。除非你确实有重大需求,否则没有必要无脑地加入更多功能,以免增加不必要的复杂度。目前,体积雾的着色器已经在计算光照的过程中实现了“自阴影”,这在很多情况已经足够了。
接下来,我们要为其增加另外两种阴影效果,分别是“体积雾对其他物体投射的阴影(投射阴影)”和“其他物体在体积雾上的阴影(接收阴影)”
接收阴影
在材质球中实现真正的“接收阴影”是一项非常复杂的任务,这对于Shader来说是非常昂贵和不切实际的。然而,我们可以利用“距离场阴影”技术来实现相似的效果。UE引擎已经广泛应用了这种技术,它计算成本低且能够生成柔和的软阴影,在性能和视觉效果之间取得了良好的平衡。
因此,我们的“接收阴影”本质上是实现一个“距离场阴影”。不过,在这篇文章中,我不会详细介绍“距离场阴影”的具体实现,因为相关信息已经很容易找到。未来,我计划写一些基于距离场的效果,届时会对“距离场阴影”进行更详细的介绍。
接下来的工作是采样全局距离场,以实现所需的阴影效果。
增加变量

为 RayMarching 新增4个输入
| 输入 | 说明 |
|---|---|
| LightVectorWS | 世界空间光方向 |
| CameraPosWS | 世界空间相机位置 |
| LocalObjectBoundsMax | 本地空间的Bound框大小 |
| LightTangent | 光切线,也就是对距离场步进时的距离,这将决定阴影边缘的模糊程度 |
| DFSSteps | DistanceFieldShdowSteps 的缩写,距离场阴影的采样步数 |
快速粘贴
((InputName="Tex"),(InputName="XYFrames"),(InputName="NumFrames"),(InputName="MaxSteps"),(InputName="StepSize"),(InputName="LocalCamVec"),(InputName="CurPos"),(InputName="FinalStepSize"),(InputName="Density"),(InputName="LightVector"),(InputName="LightColor",Input=(OutputIndex=1)),(InputName="SkyColor",Input=(OutputIndex=2)),(InputName="ShadowSteps"),(InputName="ShadowStepSize"),(InputName="ShadowDensity"),(InputName="ShadowThreshold"),(InputName="AmbientDensity"),(InputName="LightVectorWS"),(InputName="CameraPosWS"),(InputName="LocalObjectBoundsMax",Input=(OutputIndex=3,Mask=1,MaskR=1,MaskG=1,MaskB=1)),(InputName="LightTangent"),(InputName="DFSSteps")
增加代码
RayMarching代码如下:
//创建变量,从0开始累加沿相机方向步进过程中的总密度
float accumdens = 0;//Shadow部分
//创建变量,透射率和光线的能量
float transmittance =1;
float3 lightenergy = 0;
//基本和相机方向步进一样,但这些都是常量,不需要写进for里
Density *= StepSize;
LightVector *= ShadowStepSize;
ShadowDensity *= ShadowStepSize;
//一个对数来计算阈值,用来判断光线是否还值得计算
float shadowthresh = -log(ShadowThreshold)/ShadowDensity;//使用 MaxSteps 作为最大步数进行循环,每次循环执行以下操作
for (int i = 0; i < MaxSteps; i++)
{float cursample = PseudoVolumeTexture(Tex, TexSampler, saturate(CurPos), XYFrames, NumFrames).r;// 在当前步进位置进行纹理采样//Shadow部分if(cursample > 0.001)//如果采样位置没有密度,则跳过{float3 Lpos = CurPos;//Lpos将作为光线步进的起始位置float shadowdist = 0;//和之前的accumdens一样,积累阴影//自阴影for(int s = 0; s < ShadowSteps; s++){Lpos += LightVector;//移动步进位置float Lsample = PseudoVolumeTexture(Tex, TexSampler, saturate(Lpos), XYFrames, NumFrames).r;//采样//判断是否在框内,不是则直接break退出forfloat3 shadowboxtest = floor( 0.5+ (abs(0.5-Lpos)));//float exitshadowbox = shadowboxtest.x + shadowboxtest.y + shadowboxtest.z;float exitshadowbox = dot(shadowboxtest,1);//简短的通道相加if(shadowdist > shadowthresh || exitshadowbox >= 1) break;shadowdist += Lsample;//累计}//接收阴影float3 dfpos = 2 * (CurPos -0.5) * LocalObjectBoundsMax;//-0.5 * 2,得到一个居中的Bounddfpos = LWCToFloat(TransformLocalPositionToWorld(Parameters,dfpos)) - CameraPosWS;//将dfpos转换为世界空间,需要LWC精度所以在代码里转换,减去相机位置float dftracedist = 1; //创建四个变量float dfshadow = 1;//这是我们最终要的float curdist = 0;float DistanceAlongTrace = 0;for (int d = 0; d < DFSSteps; d++)//又一次的光线步进{DistanceAlongTrace += curdist;//增加距离curdist = GetDistanceToNearestSurfaceGlobal(dfpos);//采样全局距离场,他和蓝图里`DistanceToNearestSurface`是相同函数float SphereSize = DistanceAlongTrace * LightTangent;//采样距离场软阴影的球形距离dfshadow = min( saturate(curdist/SphereSize),dfshadow);//用小于它的结果来更新变量dfpos.xyz += LightVectorWS * dftracedist * curdist;//继续移动位置dftracedist *= 1.0001;//增加一个很小的因子}//更新样本和光能,算法是BeersLaw函数cursample = 1 -exp(-cursample * Density);lightenergy += exp(-shadowdist * ShadowDensity) * cursample * transmittance * LightColor * dfshadow;//在结果上乘dfshadowtransmittance *= 1-cursample;//环境光照部分shadowdist = 0;//重置一下阴影距离,继续利用它计算光照Lpos = CurPos + float3(0,0,0.025);//新位置float Lsample = PseudoVolumeTexture(Tex, TexSampler, saturate(Lpos), XYFrames, NumFrames).r;//采样shadowdist += Lsample;Lpos = CurPos + float3(0,0,0.05);Lsample = PseudoVolumeTexture(Tex, TexSampler, saturate(Lpos), XYFrames, NumFrames).r;//采样shadowdist += Lsample;Lpos = CurPos + float3(0,0,0.15);Lsample = PseudoVolumeTexture(Tex, TexSampler, saturate(Lpos), XYFrames, NumFrames).r;//采样shadowdist += Lsample;lightenergy += exp(-shadowdist * AmbientDensity) *cursample * SkyColor * transmittance;//累计到光}CurPos += -LocalCamVec;
}CurPos += LocalCamVec * (1 - FinalStepSize);
float cursample = PseudoVolumeTexture(Tex, TexSampler, saturate(CurPos), XYFrames, NumFrames).r;return float4(lightenergy, transmittance);这是增加的部分:

正像之前说的,这里不介绍距离场阴影的原理,总之我们在上一章自阴影的下方又写了接收阴影,并在后面lightenergy的累计里带上了dfshadow
Tip:
使用custom写hlsl的一大缺点就是没啥向后兼容性,EPIC改不改函数名字完全取决于心情。这里使用了一个函数GetDistanceToNearestSurfaceGlobal()他就是蓝图中的DistanceToNearestSurface, 如果将来哪个版本里函数报错了,希望你知道你需要找什么。

有关性能
尽管距离场阴影的性能相对较好,但它也并非真正的低成本。DistanceFieldShadowSteps 参数设置过低时,通常会出现一些奇怪的问题。为了避免这些问题,我在使用时一般将这个参数设置为大于32。不过需要注意的是,这意味着在主循环的每一步中都会执行32次计算。
目前效果

一个接收阴影就做好了
最近工作比较忙,这导致这个Shader写的比较慢。原本计划在一篇文章中同时做接收和投影阴影的实现,不过现在看来得把它们分开写。
为了避免拖得太久让大家着急,我们将在下一章再制作另一部分投影阴影的内容。
相关文章:
【UE5】将2D切片图渲染为体积纹理,最终实现使用RT实时绘制体积纹理【第四篇-着色器投影-接收阴影部分】
上一章中实现了体积渲染的光照与自阴影,那我们这篇来实现投影 回顾 勘误 在开始本篇内容之前,我已经对上一章中的内容的错误进行了修改。为了确保不会错过这些更正,同时也避免大家重新阅读一遍,我将在这里为大家演示一下修改的…...

Shell脚本基础——实训项目任务
项目一 项目实训 (初始Shell脚本) 项目一 项目实训 (初始Shell脚本)项目实施任务一 输入输出重定向任务二 数据输入输出操作任务三 Shell变量操作任务四 算术运算符操作任务五 设置环境变量 【实训任务】 本实训的主要任务是通过编写简单的shell脚本,完成使用数据…...
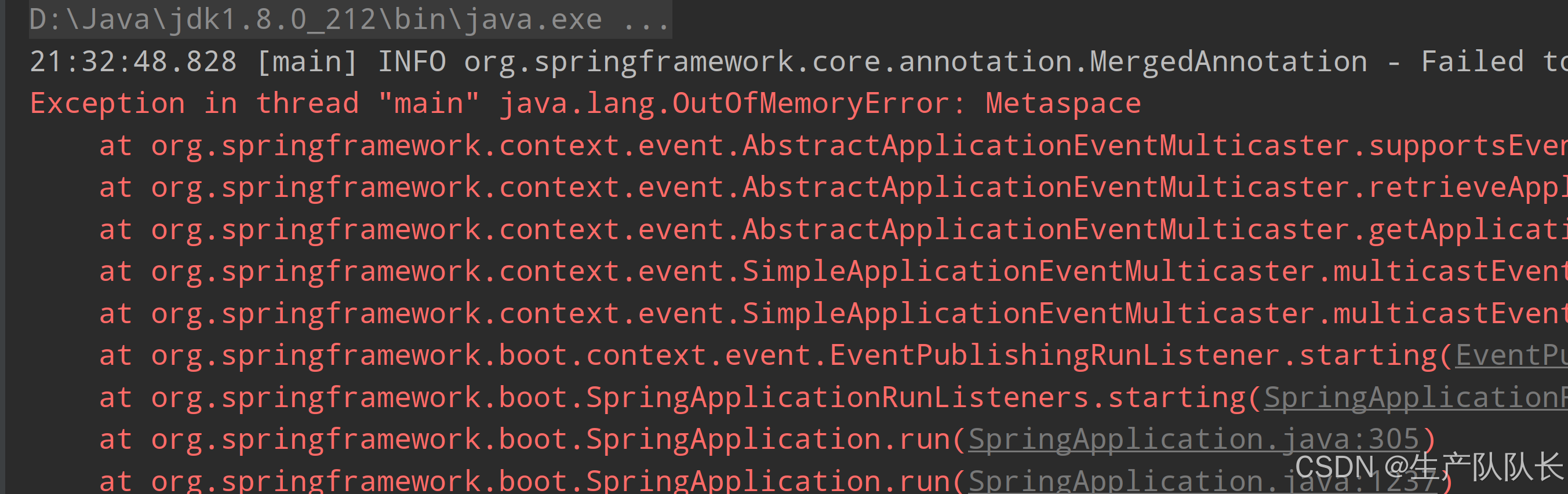
Eclipse Memory Analyzer (MAT)提示No java virtual machine was found ...解决办法
1,下载mat后安装,打开时提示 jdk版本低,需要升级到jdk17及以上版本,无奈就下载了jdk17,结果安装后提示没有jre环境,然后手动生成jre目录,命令如下: 进入jdk17目录:执行&…...

【C++篇】深度剖析C++ STL:玩转 list 容器,解锁高效编程的秘密武器
文章目录 C list 容器详解:从入门到精通前言第一章:C list 容器简介1.1 C STL 容器概述1.2 list 的特点 第二章:list 的构造方法2.1 常见构造函数2.1.1 示例:不同构造方法2.1.2 相关文档 第三章:list 迭代器的使用3.1 …...

植物大战僵尸杂交版V2.5.1下载(最新版)
2.5.1版本更新公告: 在最新的2.5.1版本中,游戏对“两面夹击”关卡进行了多项重要调整。出怪倍率和种类均有所降低,部分关卡的初始阳光量也得到了调整,以增强玩家的策略性。同时,玩家可以在这些关卡中使用投手类植物&a…...
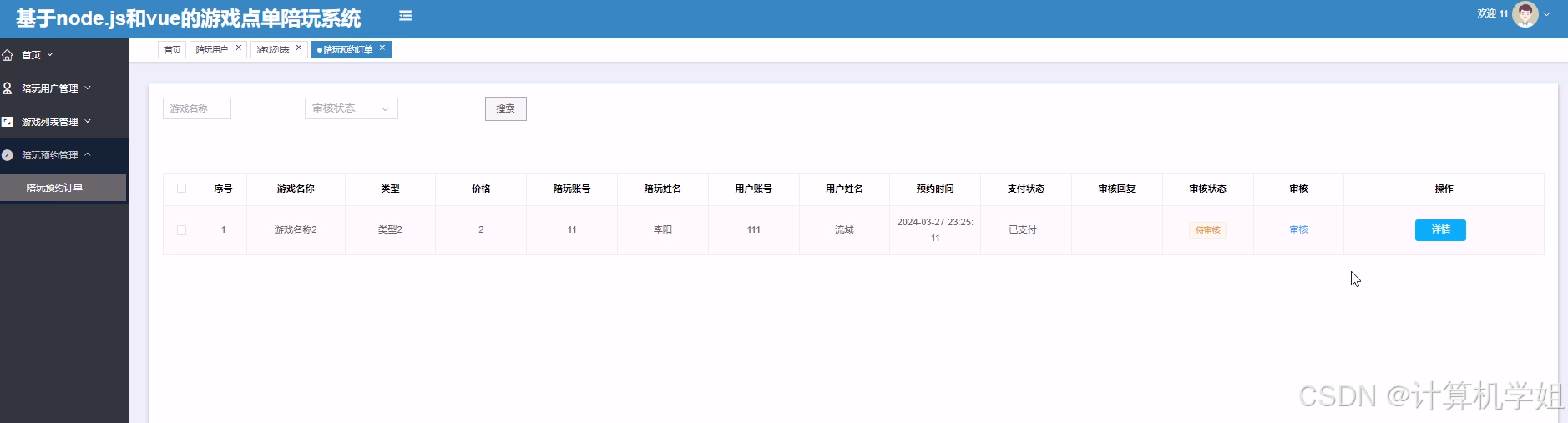
基于nodejs+vue的游戏陪玩系统
作者:计算机学姐 开发技术:SpringBoot、SSM、Vue、MySQL、JSP、ElementUI、Python、小程序等,“文末源码”。 专栏推荐:前后端分离项目源码、SpringBoot项目源码、Vue项目源码、SSM项目源码 精品专栏:Java精选实战项目…...
SVN文件不显示修改状态图标
今天安装试用SVN时发现文件不显示修改状态 以下为解决方法: 1,在有.svn的文件夹中右键--tortoiseSvn--setting 2,选中icon Overlays,右侧的status cache 选shell 3,点击icon set 如下图所示 4,修改icon…...
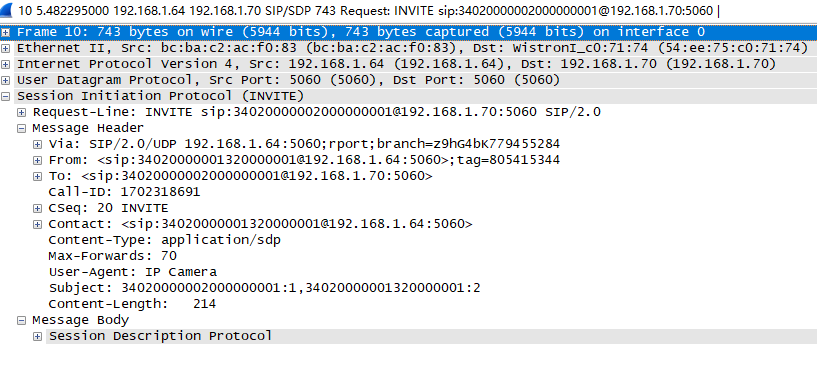
GB28181语音对讲协议详解
GB28181-2016语音对讲流程如下图1所示: 图1.语音对讲流程。 其中, 信令 1 、2 、 3 、 4 为语音广播通知、 语音广播应答消息流程; 信令 5 、 1 2 、 1 3 、 1 4 、 1 5 、 1 6 为 S I P 服务器接收到客户端的呼叫请求通过 B 2 B UA 代理方式建立语音流接收者与媒…...

JavaScript 数据可视化:前端开发的核心工具
随着互联网和大数据的快速发展,数据呈爆炸式增长,如何有效地展示和理解数据成为了一项关键技能。JavaScript 作为前端开发的主要语言,不仅在构建网页方面无可替代,也在数据可视化领域发挥了重要作用。从简单的图表到复杂的交互式展…...
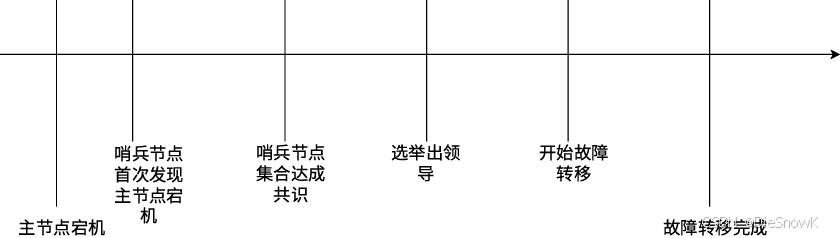
[Redis][哨兵][上]详细讲解
目录 0.前言1.基本概念1.相关名词解释2.主从复制的问题3.人工恢复主节点故障4.哨兵自动恢复主节点故障 0.前言 说明:该章节相关操作不需要记忆,理解流程和原理即可,用的时候能自主查到即可Redis的主从复制模式下,⼀旦主节点由于故…...
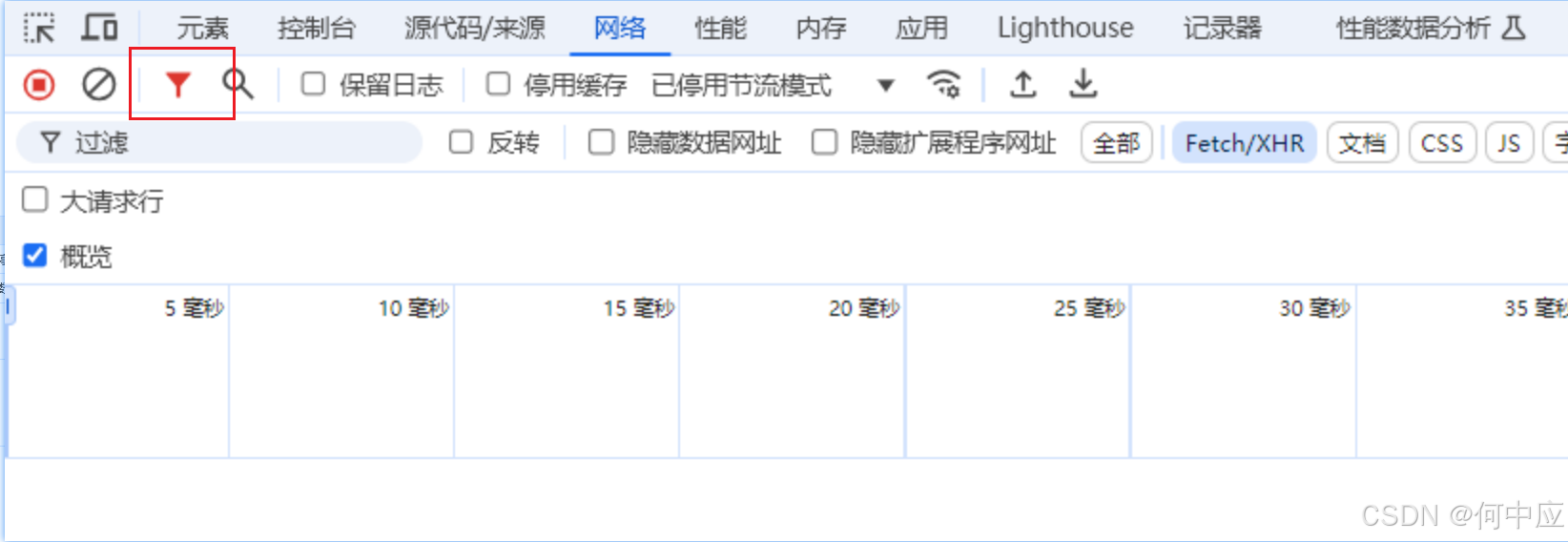
如何展开浏览器开发者模式的Fetch/XHR
说明:大多数程序员都用浏览器的F12,开发者模式查看接口,我也不例外。我常用下面这个选项,它会过滤掉掉其他文档、样式请求,只展示访问服务器的接口请求 有次,不知道点了什么,这个菜单消失找不…...

Pydantic 是一个强大的 Python 库
Pydantic 是一个强大的 Python 库,专门用于数据验证和设置管理。以下是对 Pydantic 的详细介绍: 一、主要功能和特点 数据验证: Pydantic 通过 Python 类型注解来定义数据模型,并自动验证输入数据是否符合预定义的类型和结构。提…...
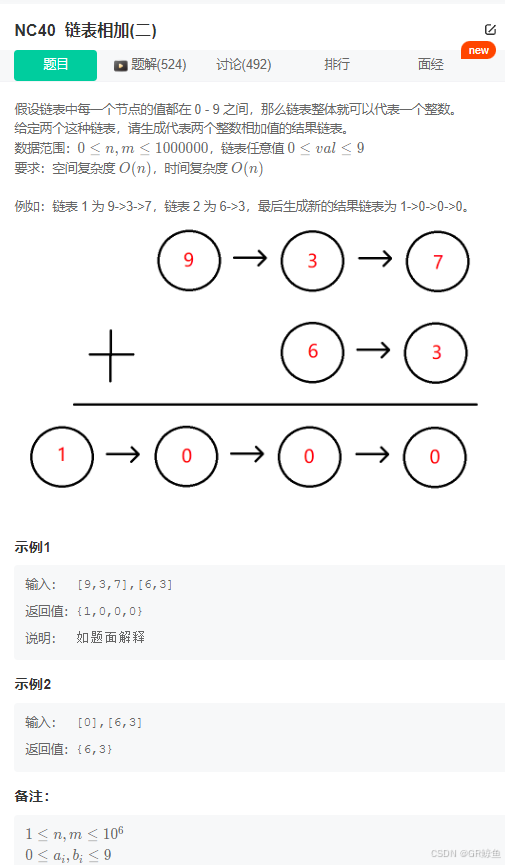
每日OJ题_牛客_NC40链表相加(二)_链表+高精度加法_C++_Java
目录 牛客_NC40链表相加(二)_链表高精度加法 题目解析 C代码 Java代码 牛客_NC40链表相加(二)_链表高精度加法 链表相加(二)_牛客题霸_牛客网 题目解析 模拟⾼精度加法的过程,只不过是在链表中模拟。 C代码 /*…...
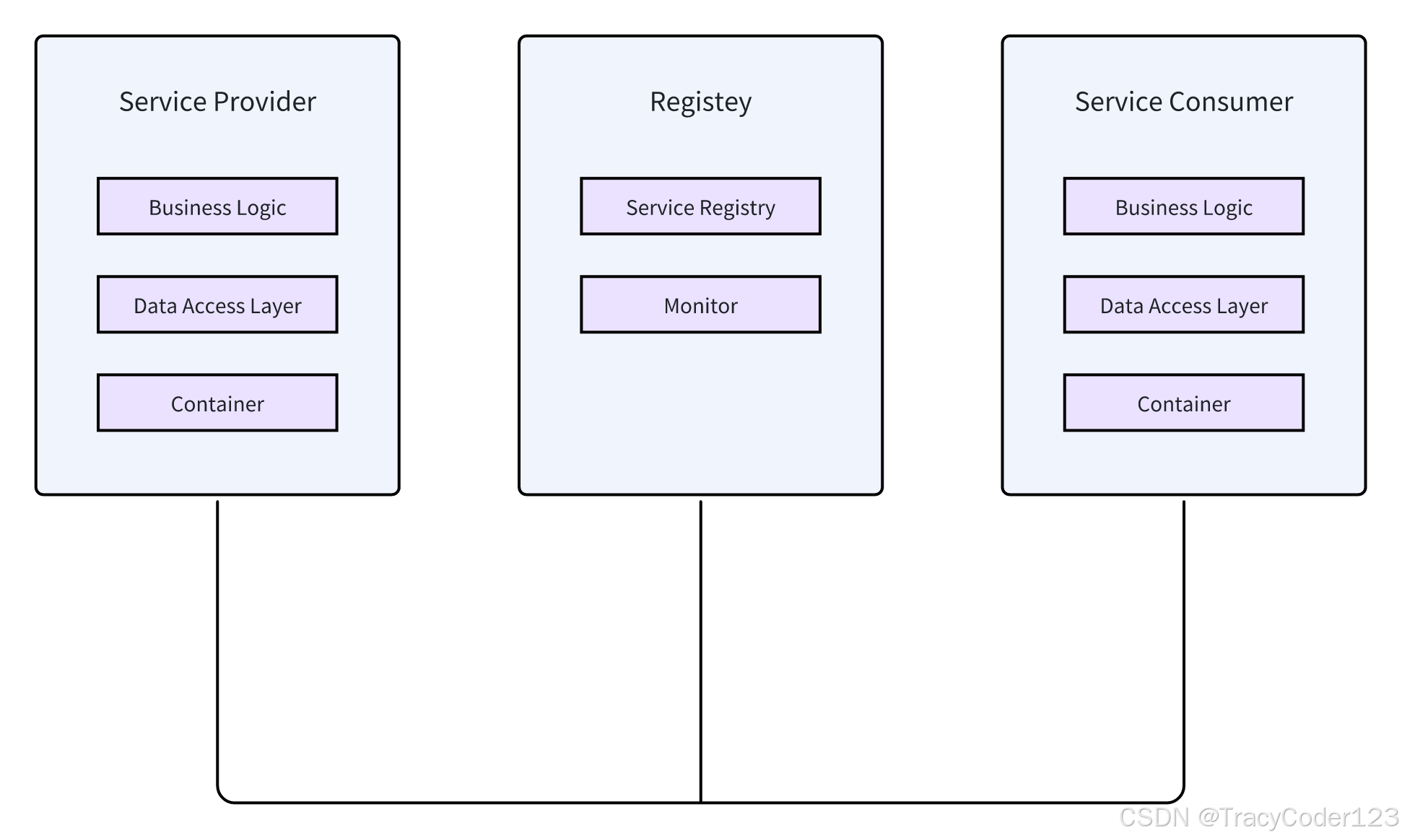
Dubbo快速入门(一):分布式与微服务、Dubbo基本概念
文章目录 一、分布式与微服务概念1.大型互联网架构目标2.集群和分布式(1)集群 (Cluster)(2)分布式计算 (Distributed Computing)(3)集群与分布式的关系(4)实践中的应用案例 3.架构演…...
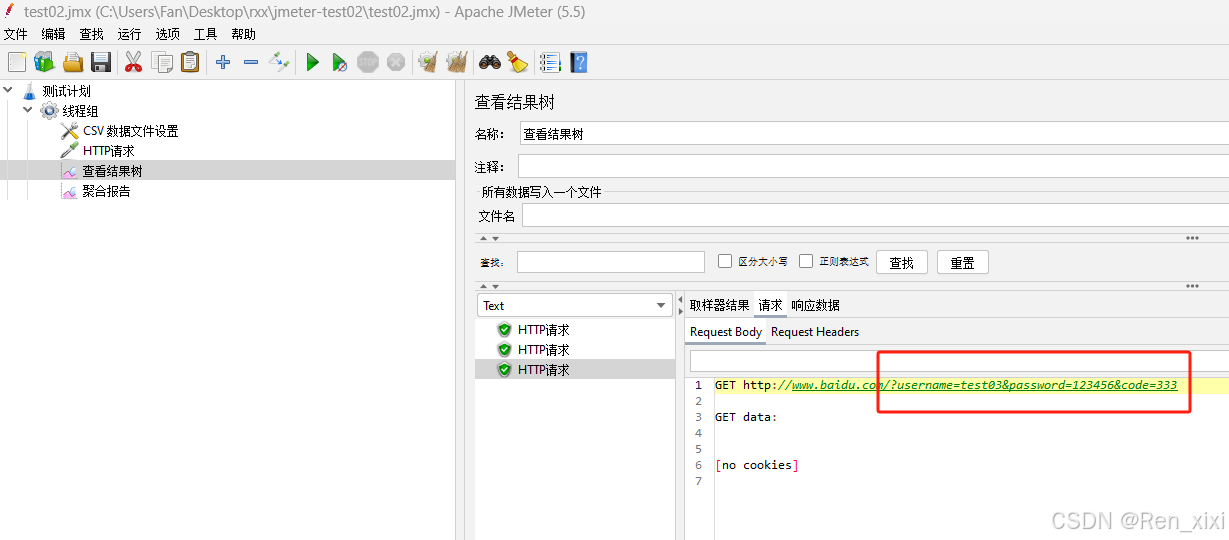
jmeter性能测试---csv数据文件设置
(1)什么时候使用CSV数据文件设置? 当不同的用户,或者同一用户多次循环时,都可以获取到不同的值 (2)使用CSV数据文件设置进行参数化的步骤? 实例: 请求:htt…...

交换基础【计算机网络】
交换基础 1、交换机的工作原理有哪4项操作,地址表如何建立的? 4项基本操作 丢弃 当本端口下的主机访问已知本端口下的主机时丢弃 转发 当某端口下的主机访问已知某端口下的主机时转发 扩散 当某端口下的主机访问未知端口下的主机时要扩散 广播 当某…...

Android12的netd分析
1.文件位置 system/netd/server/目录下的main.cpp和Android.bp 可知编译会生成netd的可执行程序。 2.main函数的流程 int main() {Stopwatch s; 。。。。。。。 // 启动NetlinkManager服务NetlinkManager *nm NetlinkManager::Instance();if (nm nullptr) {ALOGE("Una…...
将图像数据写入文件的函数imwrite()的使用)
OpenCV图像文件读写(6)将图像数据写入文件的函数imwrite()的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 将图像保存到指定的文件中。 函数 imwrite 将图像保存到指定的文件中。图像格式是根据文件名扩展名选择的(参见 cv::imread 获取扩展…...
JVM(HotSpot):方法区(Method Area)
文章目录 一、内存结构图二、方法区定义三、内存溢出问题四、常量池与运行时常量池 一、内存结构图 1.6 方法区详细结构图 1.8方法区详细结构图 1.8后,方法区是JVM内存的一个逻辑结构,真实内存用的本地物理内存。 且字符串常量池从常量池中移入堆中。 …...

JWT的基础与使用
JWT(JSON Web Token) 是一种用于在各方之间传输信息的紧凑、安全的方式,常用于身份验证和授权。它以令牌的形式将用户信息编码后传输,可以确保数据的完整性和安全性。 1.JWT的结构 JWT 是一个基于 JSON 的令牌,由三部…...

17个AI新闻站吸4.4万访客,10美元即可搭建,滥用AI威胁原创媒体!
《佛罗里达论坛报》揭秘AI伪媒体系统智东西5月15日报道,当地时间5月14日,美国调查媒体《佛罗里达论坛报》披露,南佛州《南佛罗里达标准报》是由AI批量生成的伪媒体系统。该网站包装本地新闻团队,用AI生成记者头像、履历和邮箱&…...

淘金币自动化脚本终极指南:如何每天5分钟完成淘宝全任务,节省20分钟宝贵时间
淘金币自动化脚本终极指南:如何每天5分钟完成淘宝全任务,节省20分钟宝贵时间 【免费下载链接】taojinbi 淘宝淘金币自动执行脚本,包含蚂蚁森林收取能量,芭芭农场全任务,解放你的双手 项目地址: https://gitcode.com/…...
)
用Python搞定常微分方程:从显式RK4到隐式IRK6,一个类全搞定(附完整代码)
用Python搞定常微分方程:从显式RK4到隐式IRK6,一个类全搞定(附完整代码) 在工程计算和科学研究中,常微分方程(ODE)的数值求解是一个无法回避的问题。无论是模拟电路中的电流变化,还是…...
告别‘鬼影重重’:ENVI Pixel Based Mosaicking工具处理无坐标影像的完整流程与色彩均衡技巧
告别‘鬼影重重’:ENVI Pixel Based Mosaicking工具处理无坐标影像的完整流程与色彩均衡技巧 在遥感影像处理领域,影像镶嵌是基础却至关重要的环节。当面对多源、无坐标的影像数据时,传统的地理参考镶嵌工具往往束手无策,而ENVI的…...

怎么判断铝合金熔炼炉价格才合理?
在选购铝合金熔炼炉时,价格只是一个参考。需要关注市场行情、熔炼炉厂家信誉、设备性能与售后服务等多方面因素。铝熔炼炉若性能更好,初期投入虽高,长期使用能提升产能并降低单位成本。不同类型的冶金熔炼炉各有特点,会影响选型与…...

AI商品计划:中国鞋服零售如何用机器学习解决库存与周转难题
过去十年,中国鞋服零售经历了从线下到线上、从粗放铺货到精准运营的剧烈转变。但一个老问题始终没变:该备多少货,备在哪,备什么颜色尺码。备多了,资金压在仓库,季末折扣吞噬利润;备少了…...

独立开发者如何利用Taotoken Token Plan套餐优化项目成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者如何利用Taotoken Token Plan套餐优化项目成本 对于独立开发者或小型项目团队而言,在拥抱大模型能力的同时&…...

G-Helper终极指南:3步快速解决华硕笔记本色彩失真问题
G-Helper终极指南:3步快速解决华硕笔记本色彩失真问题 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zenbook, Ex…...

汉森软件冲刺港股:年营收6亿 净利1.4亿 已获IPO备案
雷递网 雷建平 5月15日深圳市汉森软件股份有限公司(简称:“汉森软件”)日前更新招股书,准备在港交所上市。汉森软件已获IPO备案,拿到了上市的钥匙,同期一并拿到备案的企业还包括南京海纳医药科技股份有限公…...

【ElevenLabs尼泊尔文语音实战指南】:20年AI语音工程师亲授7大避坑要点与本地化部署全流程
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs尼泊尔文语音技术概览与核心价值 ElevenLabs 自 2023 年起逐步扩展其多语言语音合成能力,尼泊尔文(Nepali, ISO 639-1: ne)作为首批支持的南亚语系之一&am…...