PCL 索引空间采样
目录
一、概述
1.1原理
1.2实现步骤
1.3应用场景
二、代码实现
2.1关键函数
2.1.1 索引空间采样
2.1.2 可视化原始点云和下采样后的点云
2.2完整代码
三、实现效果
PCL点云算法汇总及实战案例汇总的目录地址链接:
PCL点云算法与项目实战案例汇总(长期更新)
一、概述
索引空间采样 是一种点云降采样方法,通过使用点云的索引来选择特定的点进行保留。这种方法灵活且易于实现,适用于需要从点云中提取特定索引点的场景。
1.1原理
索引空间采样的基本思想是使用点的索引来直接选择要保留的点。例如,可以根据一定的规则(如每隔 n 个点)选择点,或选择特定条件下的点。通过这种方式,可以控制下采样的结果,以达到所需的数据量。
常见的索引方法:
- 基于法线或曲率的条件:可以根据法线的方向、曲率等属性选择点。例如,只选择那些法线曲率大于某个阈值的点,以保留重要的几何特征。
- 根据空间位置:可以选择在特定区域内的点。例如,只选择在某个坐标范围内的点,或者选择在特定高度以上或以下的点。
- 随机选择:可以随机选择点的索引,从而确保样本的多样性。这种方法适用于需要快速采样且不需要特定规则的场景。
- 基于点的属性:根据点的颜色、强度或其他属性选择点。例如,选择强度高于某个值的点,以提取出特定特征。
- 自定义采样规则:根据应用的具体需求,自定义采样逻辑。例如,可以根据点与某个参考点的距离进行采样,只选择距离较近的点。
1.2实现步骤
- 读取点云数据。
- 根据索引选择要保留的点。
- 可视化原始点云和下采样后的点云。
1.3应用场景
- 点云简化:在不影响整体形状的情况下减少点的数量。
- 特征提取:提取特定区域或特征的点。
- 数据分析:根据索引条件选择样本点进行分析。
二、代码实现
2.1关键函数
2.1.1 索引空间采样
通过使用点云的索引进行降采样。
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>// 设置采样步长
int step_size = 10; // 每隔十个点采样一个点// 创建新的点云以存储下采样后的结果
pcl::PointCloud<pcl::PointXYZ>::Ptr sampled_cloud(new pcl::PointCloud<pcl::PointXYZ>);// 索引空间采样
for (size_t i = 0; i < cloud->size(); i += step_size)
{sampled_cloud->points.push_back(cloud->points[i]); // 添加采样点
}
sampled_cloud->width = sampled_cloud->points.size();
sampled_cloud->height = 1;
sampled_cloud->is_dense = true; // 确保点云是密集的
2.1.2 可视化原始点云和下采样后的点云
使用 PCLVisualizer 可视化原始点云和下采样后的点云,设置背景为白色。
#include <pcl/visualization/pcl_visualizer.h>// 可视化原始点云和下采样后的点云
void visualizePointClouds(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, // 原始点云pcl::PointCloud<pcl::PointXYZ>::Ptr sampled_cloud) // 下采样后的点云
{pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("Index Space Sample Viewer"));// 设置视口1,显示原始点云int vp_1;viewer->createViewPort(0.0, 0.0, 0.5, 1.0, vp_1); // 左侧窗口viewer->setBackgroundColor(1.0, 1.0, 1.0, vp_1); // 白色背景viewer->addText("Original PointCloud", 10, 10, "vp1_text", vp_1); // 标题pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> cloud_color_handler(cloud, 0, 255, 0); // 绿色viewer->addPointCloud(cloud, cloud_color_handler, "original_cloud", vp_1);// 设置视口2,显示下采样后的点云int vp_2;viewer->createViewPort(0.5, 0.0, 1.0, 1.0, vp_2); // 右侧窗口viewer->setBackgroundColor(1.0, 1.0, 1.0, vp_2); // 白色背景viewer->addText("Sampled PointCloud", 10, 10, "vp2_text", vp_2); // 标题pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> sampled_color_handler(sampled_cloud, 255, 0, 0); // 红色viewer->addPointCloud(sampled_cloud, sampled_color_handler, "sampled_cloud", vp_2);// 设置点的大小viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "original_cloud", vp_1);viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 4, "sampled_cloud", vp_2);viewer->addCoordinateSystem(1.0);viewer->initCameraParameters();while (!viewer->wasStopped()){viewer->spinOnce(100);}
}
2.2完整代码
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>// 可视化原始点云和下采样后的点云
void visualizePointClouds(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, // 原始点云pcl::PointCloud<pcl::PointXYZ>::Ptr sampled_cloud) // 下采样后的点云
{pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("Index Space Sample Viewer"));// 设置视口1,显示原始点云int vp_1;viewer->createViewPort(0.0, 0.0, 0.5, 1.0, vp_1); // 左侧窗口viewer->setBackgroundColor(1.0, 1.0, 1.0, vp_1); // 白色背景viewer->addText("Original PointCloud", 10, 10, "vp1_text", vp_1); // 标题pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> cloud_color_handler(cloud, 0, 255, 0); // 绿色viewer->addPointCloud(cloud, cloud_color_handler, "original_cloud", vp_1);// 设置视口2,显示下采样后的点云int vp_2;viewer->createViewPort(0.5, 0.0, 1.0, 1.0, vp_2); // 右侧窗口viewer->setBackgroundColor(1.0, 1.0, 1.0, vp_2); // 白色背景viewer->addText("Sampled PointCloud", 10, 10, "vp2_text", vp_2); // 标题pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> sampled_color_handler(sampled_cloud, 255, 0, 0); // 红色viewer->addPointCloud(sampled_cloud, sampled_color_handler, "sampled_cloud", vp_2);// 设置点的大小viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "original_cloud", vp_1);viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 4, "sampled_cloud", vp_2);/*viewer->addCoordinateSystem(1.0);viewer->initCameraParameters();*/while (!viewer->wasStopped()){viewer->spinOnce(100);}
}int main(int argc, char** argv)
{// -----------------------------读取点云数据---------------------------------pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);if (pcl::io::loadPCDFile<pcl::PointXYZ>("China dragon.pcd", *cloud) == -1){PCL_ERROR("Couldn't read the PCD file!\n");return -1;}// -----------------------------索引空间采样---------------------------------pcl::PointCloud<pcl::PointXYZ>::Ptr sampled_cloud(new pcl::PointCloud<pcl::PointXYZ>); // 存储下采样后的点云// 设置采样步长int step_size = 20; // 每隔十个点采样一个点// 索引空间采样for (size_t i = 0; i < cloud->size(); i += step_size){sampled_cloud->points.push_back(cloud->points[i]); // 添加采样点}sampled_cloud->width = sampled_cloud->points.size();sampled_cloud->height = 1;sampled_cloud->is_dense = true; // 确保点云是密集的// -----------------------------可视化原始点云和下采样后的点云---------------------------------visualizePointClouds(cloud, sampled_cloud);return 0;
}
三、实现效果

相关文章:
PCL 索引空间采样
目录 一、概述 1.1原理 1.2实现步骤 1.3应用场景 二、代码实现 2.1关键函数 2.1.1 索引空间采样 2.1.2 可视化原始点云和下采样后的点云 2.2完整代码 三、实现效果 PCL点云算法汇总及实战案例汇总的目录地址链接: PCL点云算法与项目实战案例汇总…...
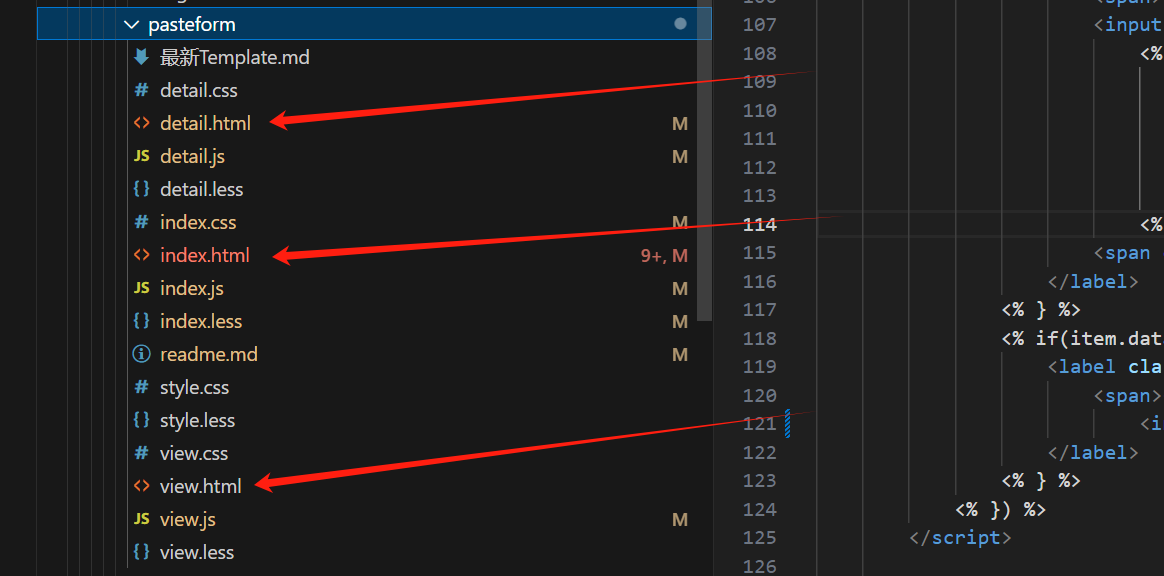
PasteForm最佳CRUD实践,实际案例PasteTemplate详解之3000问(三)
作为“贴代码”力推的一个CRUD实践项目PasteTemplate,在对现有的3个项目进行实战后效果非常舒服!下面就针对PasteForm为啥我愿称为最佳CRUD做一些回答: 哪里可以下载这个PasteForm的项目案例 目前“贴代码”对外使用PasteForm的项目有"贴Builder(PasteSpide…...

【无标题】logistic映射
当Logistic映射中的控制参数 μ \mu μ 为负数时,系统的行为与正数 μ \mu μ 的情况截然不同。Logistic映射的一般形式是: x ( t 1 ) μ x ( t ) ( 1 − x ( t ) ) x(t1) \mu x(t) (1 - x(t)) x(t1)μx(t)(1−x(t))其中 x ( t ) x(t) x(t) 表示时…...

基于Node.js+Express+MySQL+VUE科研成果网站发布查看科研信息科研成果论文下载免费安装部署
目录 1.技术选型 2.功能设计 3.系统架构 4.开发流程 5.开发背景 6.开发目标 7.技术可行性 8.功能可行性 8.1功能图 8.2 界面设计 8.3 部分代码 构建一个基于Spring Boot、Java Web、J2EE、MySQL数据库以及Vue前后端分离的科研成果网站,可…...

提升C++代码质量的一些建议
文章目录 1. 命名清晰2. 简洁性3. 一致性4. 注释5. 避免复杂性6. 重构7. 测试8. 错误处理9. 文档10. 代码复用11. 性能优化12. 安全性- 代码规范推荐 C开发中,写出优雅且可维护的代码不仅能提升代码质量,还能提高团队协作效率和项目长期的可扩展性。以下…...

起重机防摇摆技术如何达标-武汉正向科技
武汉正向科技防摇摆控制器 主要技术参数 1、防摇摆精度: 0.4 2、行车到达目标位置偏差位置偏差: 25mm 3、通讯方式:PROFINET / PROFIBUS / RS232 / RS422 / RS485; 4、消除载荷的摇摆达 96% 以上; 5、技术先进…...

[大语言模型-论文精读] MoRAG - 基于多部分融合的检索增强型人体动作生成
MoRAG--Multi-Fusion Retrieval Augmented Generation for Human Motion KS Shashank, S Maheshwari, RK Sarvadevabhatla - arXiv preprint arXiv:2409.12140, 2024 MoRAG - 基于多部分融合的检索增强型人体动作生成 1. 目录 MoRAG--Multi-Fusion Retrieval Augmented Generat…...

解决端口被占用
当你被你的编译器提醒, 当前端口被占用, 但明明你的服务什么的都没有启用,这时有三种解决办法: 1 。 重启 。 重启解决80%的问题 2 。 修改你的端口号 。 3 。 去windows命令行中查看,端口占用情况 第一步 …...

【递归】7. leetcode 404 左叶子之和
1 题目描述 题目链接:左叶子之和 2 解答思路 递归分为三步,接下来就按照这三步来思考问题 第一步:挖掘出相同的子问题 (关系到具体函数头的设计) 第二步:只关心具体子问题做了什么 (关系…...

react+antdMobie实现消息通知页面样式
一、实现效果 二、代码 import React, { useEffect, useState } from react; import style from ./style/index.less; import { CapsuleTabs, Ellipsis, Empty, SearchBar, Tag } from antd-mobile; //消息通知页面 export default function Notification(props) {const [opti…...

Git 撤销一个已经push到远端仓库的commit
在 Git 中,撤销一个已经推送到远程仓库的改动有几种不同的方法,具体取决于你是否想要完全删除改动,还是只是恢复文件的某个状态。以下是常见的几种方法: git revert 撤销特定的commit git revert 是最安全的方法,因为…...

lambda表达式底层实现
一、lambda 代码 & 反编译 原始Java代码 假设我们有以下简单的Java程序,它使用Lambda表达式来遍历并打印一个字符串列表: import java.util.Arrays; import java.util.List;public class LambdaExample {public static void main(String[] args) {…...
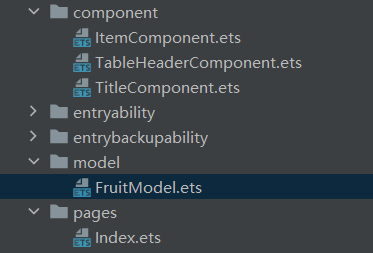
鸿蒙NEXT开发-组件事件监听和状态管理(基于最新api12稳定版)
注意:博主有个鸿蒙专栏,里面从上到下有关于鸿蒙next的教学文档,大家感兴趣可以学习下 如果大家觉得博主文章写的好的话,可以点下关注,博主会一直更新鸿蒙next相关知识 专栏地址: https://blog.csdn.net/qq_56760790/…...

《More Effective C++》的学习
引用与指针 没有所谓的null reference reference一定需要代表某个对象,所以C要求reference必须有初值。 QString &s; 使用reference可能比使用pointer更高效。 因为reference一定是有效的,而指针可能为空(需要多加一个判断࿰…...

Leetcode面试经典150题-322.零钱兑换
给你一个整数数组 coins ,表示不同面额的硬币;以及一个整数 amount ,表示总金额。 计算并返回可以凑成总金额所需的 最少的硬币个数 。如果没有任何一种硬币组合能组成总金额,返回 -1 。 你可以认为每种硬币的数量是无限的。 示…...

python17_len()函数
len()函数 A B "" C "hello world" D 18 E 18def len_test(s):try:# 尝试计算字符串的长度length len(s)return lengthexcept TypeError:# 如果不是字符串,则返回 None 或者提示错误return Noneif __name__ "__main__":# 单…...
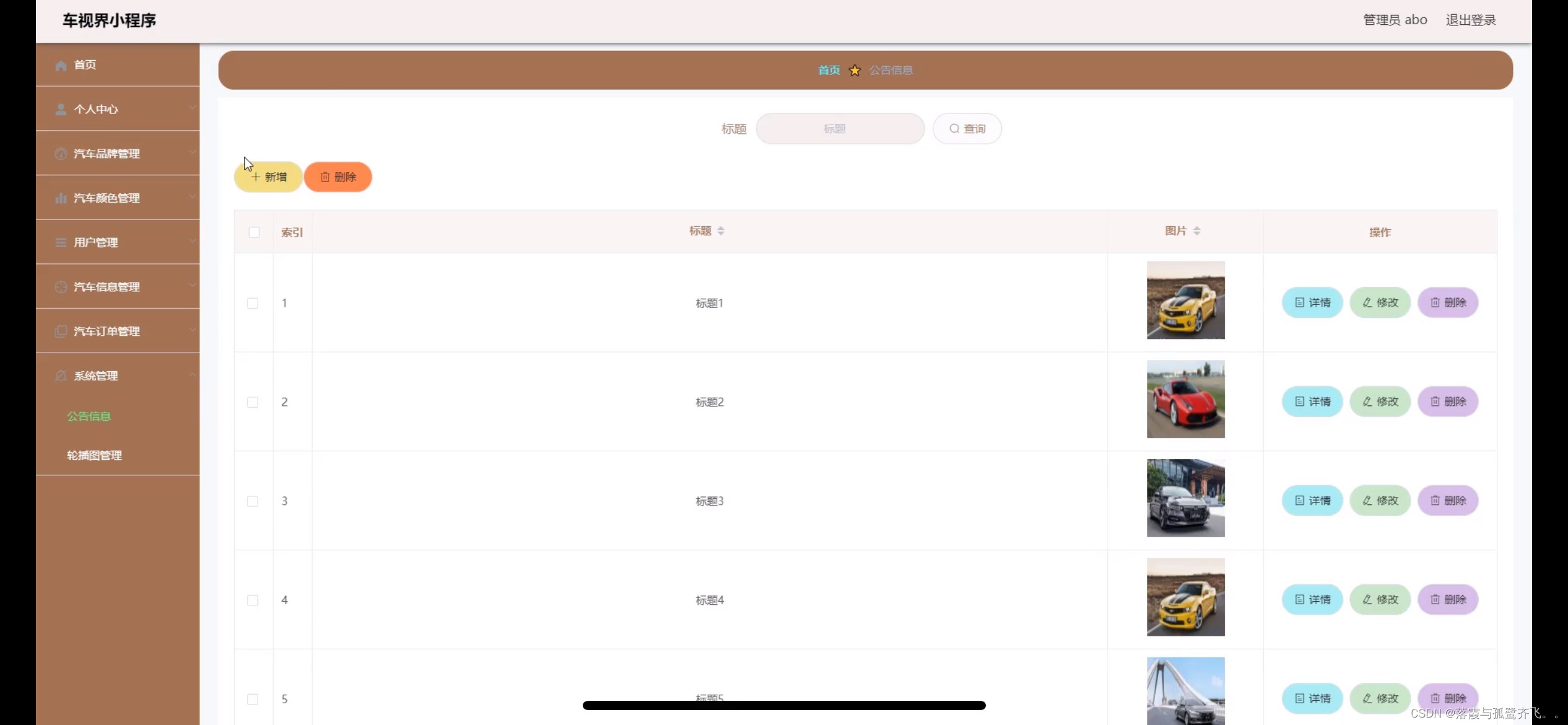
车视界系统小程序的设计
管理员账户功能包括:系统首页,个人中心,汽车品牌管理,汽车颜色管理,用户管理,汽车信息管理,汽车订单管理系统管理 微信端账号功能包括:系统首页,汽车信息,我…...

SQLCMD命令行工具导入数据并生成对应的日志文件
SQLCMD是一个命令行工具,专门用于在Microsoft SQL Server数据库上运行SQL脚本和管理任务。它提供了一种交互式和自动化的方式来执行SQL命令和脚本,并允许用户与SQL Server数据库进行高效的交互。以下是关于SQLCMD的详细介绍: 主要功能 执行SQL脚本: SQLCMD可以执行包含SQL…...

tauri中加载本地文件图片或者下载网络文件图片后存储到本地,然后通过前端页面展示
有一个需求是需要将本地上传的文件或者网络下载的文件存储到本地,并展示在前端页面上的。其实如果只是加载本地文件,然后展示还是挺简单的,可以看我的文章:tauri程序加载本地图片或者文件在前端页面展示-CSDN博客 要想实现上述需…...

QSqlDatabase在多线程中的使用
Qt中多线程使用数据库_qt数据库管理类支持多数据库,多线程-CSDN博客 1. 代码: #ifndef WIDGET_H #define WIDGET_H#include <QWidget> #include <QPushButton> #include <QSqlDatabase> #include <QSqlQuery> #include <QSqlError>…...
)
西门子S7-300/400老系统改造:用DP/DP Coupler打通新旧产线数据(附Step7组态避坑点)
西门子S7-300/400老系统改造:用DP/DP Coupler打通新旧产线数据(附Step7组态避坑点) 在工业自动化领域,老旧产线升级改造往往面临新旧设备通讯协议不兼容的难题。当传统S7-300系统需要与现代化S7-400或带PN接口的PLC进行数据交互时…...

CM-GAI:融合最优传输与连续介质力学的物理约束生成模型
1. 项目概述:当连续介质力学遇见最优传输在工程与材料科学的深水区,我们常常面临一个令人头疼的“数据荒”问题:极端条件下的物理场数据,比如材料在接近熔点的应力-应变行为,或者结构在超高冲击速度下的瞬态变形&#…...

主动学习:让AI主动挑选最有价值的样本进行标注
1. 主动学习:不是AI在“等喂饭”,而是在“主动点菜”你有没有遇到过这种场景:手头有个图像分类项目,标注一张医学影像要花资深放射科医生15分钟,而你手上有5万张未标注CT切片——但预算只够标300张。或者在做客服对话意…...

RT-DETR最新创新改进系列:4D辅助细化为检测颈部注入额外表达,融合后再增强,解码前再提纯,精度提升从特征质量开始!【细化特征,稳住精度】
本文为 RT-DETR 改进系列纯净发布稿,写法采用模块化技术博文形式:先讲痛点,再讲结构,再给配置、训练方式、实验表格和注意事项。全文仅保留技术正文,便于直接发布。摘要 本文围绕 4D 辅助细化 展开。该版本属于 结构增…...

Go语言极简Web框架Meridian:依赖注入与清晰架构实践
1. 项目概述:一个“极简”的现代Web应用框架最近在GitHub上闲逛,又看到了一个名为rynfar/meridian的项目。点进去一看,简介写着“A modern web framework for building APIs and web applications in Go”。说实话,现在Go语言的We…...

AI驱动的网络安全:深度学习与LLM在威胁检测与教育中的应用
1. 项目概述:AI赋能的网络安全新范式在网络安全领域,我们正面临着一个日益严峻的悖论:一方面,攻击手段正变得前所未有的复杂和自动化;另一方面,74%的安全事件仍然源于人为因素。这种技术与人的双重挑战催生…...

【文件上传绕过】十六—十八:巧用文件幻数与内容伪装突破类型校验
1. 文件幻数:藏在二进制里的身份证 每次上传图片时,你有没有好奇过系统是怎么判断"这张图真的是JPG"的?这就像超市扫码器识别商品条形码一样,计算机其实是通过读取文件开头的几个特殊字节——我们称之为**幻数ÿ…...

从学生成绩表到销售报表:手把手教你用ag-grid列组/行组构建复杂业务表格
企业级销售报表实战:用ag-grid行组与列组构建动态分析系统 当业务数据从Excel迁移到前端可视化系统时,开发团队常面临多维分析的挑战。某零售企业曾因无法实时查看"华东区→浙江省→杭州市"三级维度下的季度销售趋势,导致错失库存调…...
)
为什么92%的AI创作者不敢打印自己的Midjourney作品?揭秘树莓派印相避坑指南,含色彩管理ICC配置包(限免72小时)
更多请点击: https://intelliparadigm.com 第一章:为什么92%的AI创作者不敢打印自己的Midjourney作品? 当一张由 Midjourney 生成的「超写实森林神殿」在屏幕上熠熠生辉时,创作者往往兴奋地截图、转发、设为壁纸——却极少有人按…...

Go+SQLite构建极简自托管笔记共享平台:从原理到部署实战
1. 项目概述:一个极简、自托管的笔记共享平台最近在折腾个人知识管理工具时,我一直在寻找一个能让我快速分享单篇笔记或代码片段,同时又不想依赖第三方云服务的方案。市面上的Pastebin类工具很多,但要么功能臃肿,要么隐…...