Kotlin:1.8.0 的新特性
一、概述
Kotlin 1.8.0版本英语官方文档
Kotlin 1.8.0 中文官方文档
The Kotlin 1.8.0 release is out and here are some of its biggest highlights:
Kotlin 1.8.0发布了,下面是它的一些亮点:
- JVM 平台新增实验性函数:递归复制或删除目录内容
- 改进了 kotlin-reflect 性能
- 新增 -Xdebug 编译器选项以提供更好的调试体验
- kotlin-stdlib-jdk7 与 kotlin-stdlib-jdk8 合并进了 kotlin-stdlib
- 改进了 Objective-C/Swift 互操作性
- 与 Gradle 7.3 的兼容性
主要演示的其中三个特性,测试结果图如下

二、kotlin-stdlib-jdk7 与 kotlin-stdlib-jdk8 合并进了 kotlin-stdlib
标准库
Kotlin 1.8.0:
稳定了一些函数——Java 与 Kotlin 之间的 TimeUnit 转换、 cbrt()、 Java Optional 扩展函数。
提供可比较且可减去的 TimeMark 预览版。
包含 java.nio.file.path 的实验性扩展函数。
附赠改进了 kotlin-reflect 性能。
2.1 cbrt()函数
cbrt()函数允许您计算双精度或浮点数的实数立方根,它现在是稳定的。
fun testcbrt(){println("------ cbrt()函数计算双精度或浮点数的实数立方根 结果 ------")val num = 27val negNum = -numprintln("The cube root of ${num.toDouble()} is:"+ cbrt(num.toDouble()))println("The cube root of ${negNum.toDouble()} is:"+ cbrt(negNum.toDouble()))
}
运行结果

2.2 Java 与 Kotlin 之间的 TimeUnit 转换
kotlin中的toTimeUnit()和toDurationUnit()函数。时间现在稳定了。这些功能在Kotlin 1.6.0中作为实验版本引入,提高了Kotlin与Java之间的互操作性。
现在您可以轻松地在Java Java .util.concurrent. timeunit和Kotlin Kotlin .time. durationunit之间进行转换。这些函数仅在JVM上受支持。
// For use from Java
fun wait(timeout: Long, unit: TimeUnit) {val duration: Duration = timeout.toDuration(unit.toDurationUnit())println("java timeout = $timeout $unit 使用 kotlin 转换后 duration = $duration")
}fun main(){testcbrt()println("------ Java 与 Kotlin 之间的 TimeUnit 转换 ------")wait(1, TimeUnit.HOURS)wait(1, TimeUnit.MINUTES)wait(60, TimeUnit.MINUTES)wait(3, TimeUnit.SECONDS)wait(60, TimeUnit.SECONDS)wait(1000, TimeUnit.MILLISECONDS)wait(1000, TimeUnit.MICROSECONDS)}
运行结果

2.3 可比较可减去的 TimeMark
在Kotlin 1.8.0之前,如果您想计算多个TimeMark与现在之间的时间差,那么一次只能对一个TimeMark调用elapsedNow()。 这使得比较结果变得困难,因为两个elapsedNow()函数调用不能完全同时执行。
为了解决这个问题,在Kotlin 1.8.0中,您可以从同一时间源中减去和比较timemark。 现在可以创建一个新的TimeMark实例来表示Now,并从中减去其他TimeMark。这样,从这些计算中收集的结果就可以保证彼此是相对的。
fun testTimeMark(){println("------ 可比较可减去的 TimeMark ------")val timeSource = TimeSource.Monotonicvar mark1 = timeSource.markNow()Thread.sleep(500)val mark2 = timeSource.markNow()repeat(4) { n ->val elapsed1 = mark1.elapsedNow()val elapsed2 = mark2.elapsedNow()// Difference between elapsed1 and elapsed2 can vary depending// on how much time passes between the two elapsedNow() callsprintln("Measurement 1.${n + 1}: elapsed1=$elapsed1, " + "elapsed2=$elapsed2, diff=${elapsed1 - elapsed2}")}println()// Since 1.8.0repeat(4) { n ->val mark3 = timeSource.markNow()val elapsed1 = mark3 - mark1val elapsed2 = mark3 - mark2// Now the elapsed times are calculated relative to mark3,// which is a fixed valueprintln("Measurement 2.${n + 1}: elapsed1=$elapsed1, " + "elapsed2=$elapsed2, diff=${elapsed1 - elapsed2}")}// It's also possible to compare time marks with each other// This is true, as mark2 was captured later than mark1println("mark2 > mark1 : ${mark2 > mark1}")
}
运行结果
三、kt_180.kt文件代码
package com.example.test.ktversionimport java.util.concurrent.TimeUnit
import kotlin.math.cbrt
import kotlin.time.Duration
import kotlin.time.TimeSource
import kotlin.time.toDuration
import kotlin.time.toDurationUnit/*https://book.kotlincn.net/text/whatsnew18.html标准库Kotlin 1.8.0:稳定了一些函数——Java 与 Kotlin 之间的 TimeUnit 转换、 cbrt()、 Java Optional 扩展函数。提供可比较且可减去的 TimeMark 预览版。包含 java.nio.file.path 的实验性扩展函数。附赠改进了 kotlin-reflect 性能。*/
/*** cbrt()函数允许您计算双精度或浮点数的实数立方根,它现在是稳定的。*/
fun testcbrt(){println("------ cbrt()函数计算双精度或浮点数的实数立方根 结果 ------")val num = 27val negNum = -numprintln("The cube root of ${num.toDouble()} is:"+ cbrt(num.toDouble()))println("The cube root of ${negNum.toDouble()} is:"+ cbrt(negNum.toDouble()))
}/*Java 与 Kotlin 之间的 TimeUnit 转换kotlin中的toTimeUnit()和toDurationUnit()函数。时间现在稳定了。这些功能在Kotlin 1.6.0中作为实验版本引入,提高了Kotlin与Java之间的互操作性。现在您可以轻松地在Java Java .util.concurrent. timeunit和Kotlin Kotlin .time. durationunit之间进行转换。这些函数仅在JVM上受支持。*/
// For use from Java
fun wait(timeout: Long, unit: TimeUnit) {val duration: Duration = timeout.toDuration(unit.toDurationUnit())println("java timeout = $timeout $unit 使用 kotlin 转换后 duration = $duration")
}/*可比较可减去的 TimeMark在Kotlin 1.8.0之前,如果您想计算多个TimeMark与现在之间的时间差,那么一次只能对一个TimeMark调用elapsedNow()。这使得比较结果变得困难,因为两个elapsedNow()函数调用不能完全同时执行。为了解决这个问题,在Kotlin 1.8.0中,您可以从同一时间源中减去和比较timemark。现在可以创建一个新的TimeMark实例来表示Now,并从中减去其他TimeMark。这样,从这些计算中收集的结果就可以保证彼此是相对的。*/
fun testTimeMark(){println("------ 可比较可减去的 TimeMark ------")val timeSource = TimeSource.Monotonicvar mark1 = timeSource.markNow()Thread.sleep(500)val mark2 = timeSource.markNow()repeat(4) { n ->val elapsed1 = mark1.elapsedNow()val elapsed2 = mark2.elapsedNow()// Difference between elapsed1 and elapsed2 can vary depending// on how much time passes between the two elapsedNow() callsprintln("Measurement 1.${n + 1}: elapsed1=$elapsed1, " + "elapsed2=$elapsed2, diff=${elapsed1 - elapsed2}")}println()// Since 1.8.0repeat(4) { n ->val mark3 = timeSource.markNow()val elapsed1 = mark3 - mark1val elapsed2 = mark3 - mark2// Now the elapsed times are calculated relative to mark3,// which is a fixed valueprintln("Measurement 2.${n + 1}: elapsed1=$elapsed1, " + "elapsed2=$elapsed2, diff=${elapsed1 - elapsed2}")}// It's also possible to compare time marks with each other// This is true, as mark2 was captured later than mark1println("mark2 > mark1 : ${mark2 > mark1}")
}fun main(){testcbrt()println("------ Java 与 Kotlin 之间的 TimeUnit 转换 ------")wait(1, TimeUnit.HOURS)wait(1, TimeUnit.MINUTES)wait(60, TimeUnit.MINUTES)wait(3, TimeUnit.SECONDS)wait(60, TimeUnit.SECONDS)wait(1000, TimeUnit.MILLISECONDS)wait(1000, TimeUnit.MICROSECONDS)testTimeMark()
}相关文章:

Kotlin:1.8.0 的新特性
一、概述 Kotlin 1.8.0版本英语官方文档 Kotlin 1.8.0 中文官方文档 The Kotlin 1.8.0 release is out and here are some of its biggest highlights: Kotlin 1.8.0发布了,下面是它的一些亮点: JVM 平台新增实验性函数:递归复制或删除目录内容改进了 …...
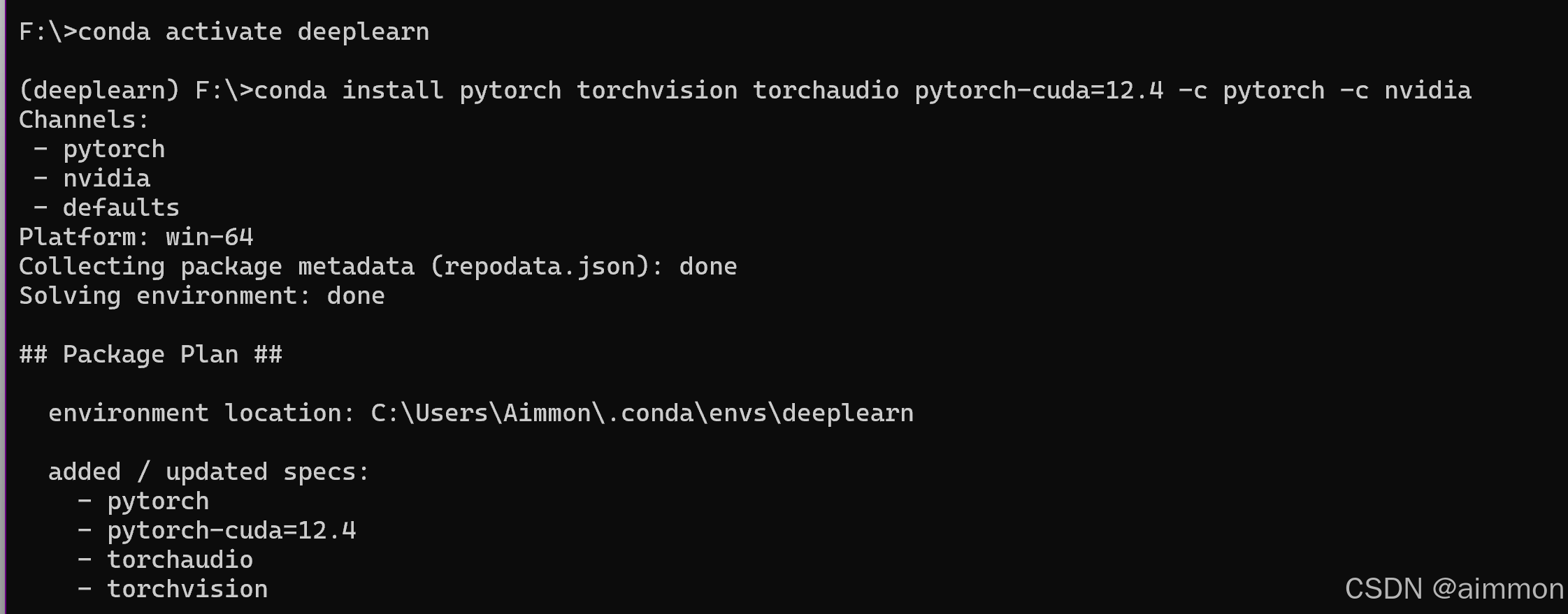
深度学习之开发环境(CUDA、Conda、Pytorch)准备(4)
目录 1.CUDA 介绍 1.1 CUDA 的基本概念 1.2 CUDA 的工作原理 1.3 CUDA 的应用领域 2. 安装CUDA 2.1 查看GPU版本 2.2 升级驱动(可选) 2.3 查看CUDA版本驱动对应的支持的CUDA ToolKit工具包 2.4 下载Toolkit 2.5 安装(省略࿰…...
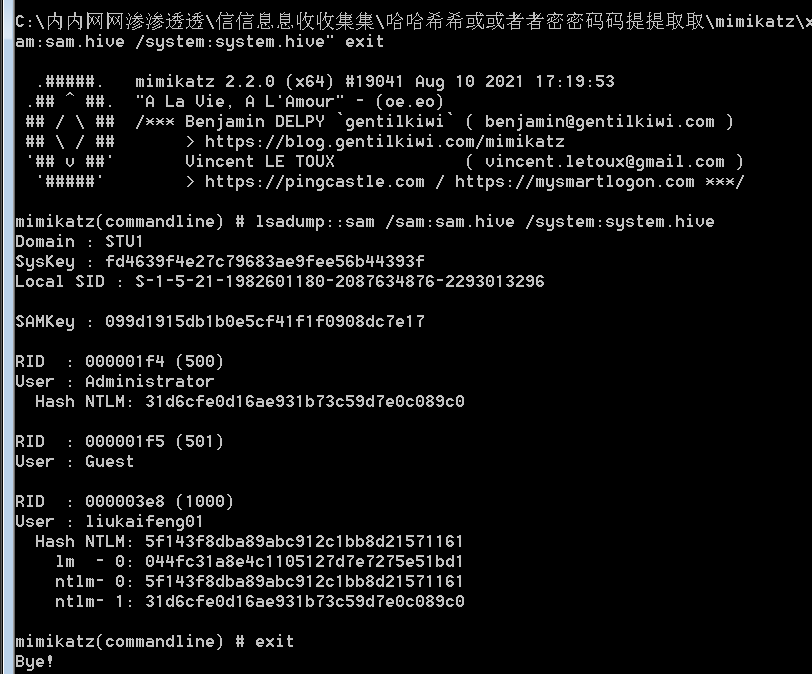
10月2日笔记(内网资源探测篇)
内网资源探测 在内网渗透中,测试人员往往需要通过各种内网扫描技术来探测内网资源的情况,为后续的横向渗透做准备,通常需要发现内网存活的主机,并探测主机的操作系统、主机开放了哪些端口、端口上运行了哪些服务、服务的当前版本…...

SpringCloud-基于Docker和Docker-Compose的项目部署
一、初始化环境 1. 卸载旧版本 首先,卸载可能已存在的旧版本 Docker。如果您不确定是否安装过,可以直接执行以下命令: sudo yum remove docker \docker-client \docker-client-latest \docker-common \docker-latest \docker-latest-logro…...

Linux下的基本指令/命令(一)
目录 基本命令 1. Is命令/指令: 罗列当前目录下指定的文件或者目录. 2. pwd命令: 查看当前工作的路径 3. cd命令: 切换到指定路径下。 只能切换到目录中 4. tree命令: 树状显式目录 使用前要输入命令 yum install -y tree ,用来安装一个…...

从零开始Ubuntu24.04上Docker构建自动化部署(四)Docker安装gitlab
你会发现所有gitlab都无法拉取到的情况下,经查找极狐下的gitlab还可以下载,具体如下: 建议保存地址: https://packages.gitlab.cn/#browse/searchkeyword%3Dgitlab 最新版本: sudo docker pull registry.gitlab.cn…...

No module named ‘_ssl‘
目录 背景具体报错检验升级过程步骤一:升级ssl。步骤二:重新编译安装python 背景 换了台服务器按照之前centos升级python版本升级python正常编译安装成功,但是当使用时又出现了奇怪的报错,估计是机器太老了 具体报错 这个报错也…...

Linux —— Socket编程(三)
一、本章重点 1. tcp服务器实现思路,进一步了解和总结相关的接口 2. 了解日志和守护进程 二、tcp服务器核心思路 tcp版的服务器与udp的不同在于,udp是面向数据报传输数据,在数据传输中不需要建立与客户端的链接,直接用recvfrom…...

5G N2 N3 N6 NB口
在5G架构中,N2、N3和N6是三种关键的接口,每个接口都有其特定的功能和应用场景。 N2接口: N2接口是5G无线接入网(RAN)与5G核心网(5GC)之间的控制面接口。它主要负责传递控制平面消息,…...
【数据结构】堆(Heap)详解
在深入了解堆这一重要的数据结构之前,不妨先回顾一下我之前的作品 ——“二叉树详解”。 上篇文章👉剖析二叉树(Binary Tree) 二叉树作为一种基础的数据结构,为我们理解堆以及其他更复杂的数据结构奠定了坚实的基础。它…...

《Linux从小白到高手》理论篇(四):Linux用户和组相关的命令
List item 本篇介绍Linux用户和组相关的命令,看完本文,有关Linux用户和组相关的常用命令你就掌握了99%了。Linux用户和组相关的命令可以分为以下六类: 一.用户和用户组相关查询操作命令: Id id命令用于显示用户的身份标识。常见…...
)
OpenGL ES 之EGL(6)
OpenGL ES 之EGL(6) 简述 EGL是OpenGL ES的封装,目的是跨设备跨平台,隔离不同平台对窗口不同的实现。上一节我们基本没有使用到EGL,因为GLSurfaceView帮助我们处理了相关的逻辑,我们这一节来看一下EGL的一些概念以及接口的使用。…...

kotlin 委托
一、类委托 interface DB{fun insert() } class SqliteDB : DB {override fun insert() {println(" SqliteDB insert")} }class MySql : DB{override fun insert() {println(" MySql insert")} }class OracleDB : DB{override fun insert() {println(&quo…...

Stream流的中间方法
一.Stream流的中间方法 注意1:中间方法,返回新的Stream流,原来的Stream流只能使用一次,建议使用链式编程 注意2:修改Stream流中的数据,不会影响原来集合或者数组中的数据 二.filter filter的主要用法是…...

【车载开发系列】ParaSoft单元测试环境配置(四)
【车载开发系列】ParaSoft单元测试环境配置(四) 【车载开发系列】ParaSoft单元测试环境配置(四) 【车载开发系列】ParaSoft单元测试环境配置(四)一. 如何设置过滤二. 如何设置静态扫描的规则三. 如何设置单…...

IDEA 设置自动定位文件
一、场景分析 IDEA 在使用的过程中,发现有时候,打开一个类,它并不能自动帮我们在左侧 Project 树中定位出文件,需要自己手动点击 瞄准 图标。很不方便。 二、解决方法 1、点击 瞄准 图标旁边的 竖三点 2、将 Alwasy Select Opene…...

Nature Machine Intelligence 基于强化学习的扑翼无人机机翼应变飞行控制
尽管无人机技术发展迅速,但复制生物飞行的动态控制和风力感应能力,仍然遥不可及。生物学研究表明,昆虫翅膀上有机械感受器,即钟形感受器campaniform sensilla,探测飞行敏捷性至关重要的复杂气动载荷。 近日࿰…...

[Web安全 网络安全]-XXE 外部实体注入攻击XML
文章目录: 一:前言 1.定义 1.1 XXE 1.2 XML可扩展标记语言 2.DDT文档类型定义 2.1 分类 2.2 元素element DTD元素 DTD属性 2.3 实体entity DTD实体类别 DTD实体声明引用 声明:内部 外部 参数实体 公共实体 引用:…...

8--苍穹外卖-SpringBoot项目中套餐管理 详解(二)
目录 删除套餐 需求分析和设计 代码开发 根据id查询套餐 mapper层 Service层 ServiceImpl层 Mapper层 批量删除套餐 mapper层 Service层 ServiceImpl层 Mapper层 SetmealMapper.xml 修改套餐 需求分析和设计 代码开发 起售停售套餐 需求分析和设计 代码开发…...

测试面试题:pytest断言时,数据是符点类型,如何断言?
在使用 Pytest 进行断言时,如果数据是浮点类型,可以使用以下方法进行断言: 一、使用pytest.approx pytest.approx可以用来比较两个浮点数是否近似相等。例如: import pytestdef test_float_assertion():result 3.14159expecte…...

别再只盯着密钥了!深入ESP32 eFuse,看懂flash加密背后的硬件安全逻辑
别再只盯着密钥了!深入ESP32 eFuse,看懂flash加密背后的硬件安全逻辑 当你在ESP32项目中使用flash加密功能时,是否曾疑惑过:为什么简单地烧录几个eFuse位就能实现固件保护?那些看似神秘的DISABLE_DL_DECRYPT、FLASH_CR…...

用1DCNN预测股票价格:一份基于TensorFlow/Keras的保姆级实战代码解析
用1DCNN预测股票价格:从数据预处理到模型优化的全流程实战 金融时间序列预测一直是量化分析领域的核心挑战之一。传统的统计方法如ARIMA在处理非线性关系时表现有限,而深度学习中的一维卷积神经网络(1DCNN)因其捕捉局部特征的能力,在股价预测…...
)
Abaqus 6.12 保姆级教程:手把手教你搞定悬臂梁的动力学仿真(附阻尼设置与结果动画)
Abaqus 6.12 悬臂梁动力学仿真全流程实战:从阻尼优化到动画渲染 悬臂梁作为结构动力学分析的经典案例,在机械振动、建筑抗震等领域具有广泛的应用价值。本文将基于Abaqus 6.12平台,通过一个完整的动力学仿真案例,深入解析从模型建…...

用LangChain Tools打造会自主查资料的GPT模型
1. 项目概述:为什么你需要一个“会自己查资料”的GPT模型?我第一次在ChatGPT里输入“2024年巴黎奥运会新增了哪些比赛项目?”时,得到的回复是:“我的训练数据截止于2021年9月,无法提供2024年的最新信息。”…...

从零开始:sherpa-onnx跨平台语音识别终极指南
从零开始:sherpa-onnx跨平台语音识别终极指南 【免费下载链接】sherpa-onnx Speech-to-text, text-to-speech, speaker diarization, speech enhancement, source separation, and VAD using next-gen Kaldi with onnxruntime without Internet connection. Support…...

Windows系统mqad.dll文件丢失无法启动程序解决
在使用电脑系统时经常会出现丢失找不到某些文件的情况,由于很多常用软件都是采用 Microsoft Visual Studio 编写的,所以这类软件的运行需要依赖微软Visual C运行库,比如像 QQ、迅雷、Adobe 软件等等,如果没有安装VC运行库或者安装…...

激活沉睡用户:WPF应用的唤醒策略
在现代软件开发中,如何有效地激活沉睡用户是每个应用开发者都需要面对的问题。特别是对于WPF(Windows Presentation Foundation)应用来说,如何在用户不活跃一段时间后,重新唤醒他们的兴趣并引导他们回到应用中使用,是一个既有挑战又有策略性的任务。本文将介绍如何通过邮…...

用TensorFlow Lite Micro在Arduino上跑个‘Hello World’:从模型部署到LED闪烁的完整流程
在Arduino Nano 33 BLE Sense上部署TinyML模型的实战指南 当微控制器遇上机器学习,TinyML技术正在重新定义边缘计算的边界。本文将带您完成从TensorFlow Lite模型训练到Arduino硬件部署的全流程,通过控制LED亮度直观展示正弦波预测结果,让算…...

开源图表实时编辑器:从代码到可视化的无缝创作解决方案
开源图表实时编辑器:从代码到可视化的无缝创作解决方案 【免费下载链接】mermaid-live-editor Edit, preview and share mermaid charts/diagrams. New implementation of the live editor. 项目地址: https://gitcode.com/GitHub_Trending/me/mermaid-live-edito…...

基于Spring Boot的金融级钱包与支付系统设计与实现
1. 项目概述与核心价值 最近在折腾一个需要集成支付功能的项目,后台管理、用户体系都搭好了,就差一个稳定、灵活且能快速上线的钱包与支付模块。找了一圈开源方案,要么太重,耦合了太多业务逻辑;要么太轻,连…...