无人机控制和飞行、路径规划技术分析
无人机控制和飞行、路径规划技术是现代无人机技术的核心组成部分,它们共同决定了无人机的性能和应用范围。以下是对这些技术的详细分析:
一、无人机控制技术
无人机控制技术主要涉及飞行控制系统的设计、传感器数据的处理以及指令的发送与执行。飞行控制系统(Flight Control System,简称FCS)可以看作是无人机的大脑,它负责接收传感器数据、处理这些信息,并发送指令给执行机构,从而实现对无人机飞行状态的精准控制。

1. 飞行控制系统
核心部件:飞行控制系统包括检测模块、控制模块、执行模块和供电模块。检测模块用于测量无人机的姿态数据,如俯仰角、滚转角和偏航角;控制模块负责处理这些数据并生成控制指令;执行模块则根据指令调整无人机的飞行状态;供电模块为整个系统提供电力支持。
工作原理:通过IMU(惯性测量单元)等传感器获取无人机的姿态数据,经过控制模块的运算和判断后,向执行机构(如电机、舵机等)发送控制指令,从而实现对无人机飞行姿态的精确控制。
2. 传感器技术
关键传感器:无人机上常用的传感器包括三轴陀螺仪、三轴加速度计、三轴地磁传感器和气压计等。这些传感器能够实时测量无人机的姿态、加速度、航向和高度等关键参数。
作用:传感器数据是飞行控制系统进行决策和控制的基础。通过融合这些传感器的数据,飞行控制系统能够准确感知无人机的飞行状态,并作出相应的调整。
3. 指令传输与执行
数据传输:飞行控制系统与地面控制站或遥控器之间通过无线通信链路传输指令和数据。这些指令包括起飞、降落、飞行路径调整等。
执行机构:执行机构如电机和舵机根据接收到的指令调整无人机的飞行状态。例如,通过改变电机的转速来控制无人机的升降和前进后退;通过调整舵机的角度来改变无人机的飞行方向。
二、无人机飞行技术
无人机飞行技术主要涉及飞行原理、飞行模式以及飞行稳定性等方面。

1. 飞行原理
升力产生:无人机通过旋翼或固定翼产生升力以支持其飞行。旋翼无人机(如四旋翼无人机)通过调整旋翼的转速和旋转方向来控制升力和方向;固定翼无人机则通过机翼的升力原理和推进器的推力来实现飞行。
姿态控制:通过调整无人机的俯仰角、滚转角和偏航角来实现对其飞行姿态的精确控制。这些姿态的调整依赖于飞行控制系统的指令和传感器的反馈。
2. 飞行模式
手动模式:由操作员通过遥控器或地面控制站直接控制无人机的飞行状态。
自主模式:无人机根据预设的飞行路径或任务规划自动飞行。这种模式下,无人机能够自主避开障碍物、调整飞行速度等。
混合模式:结合手动和自主模式的优点,根据具体任务需求进行灵活切换。
3. 飞行稳定性
姿态稳定控制:确保无人机在飞行过程中保持稳定的姿态是飞行稳定性的关键。通过飞行控制系统的精确控制和传感器的实时反馈,无人机能够在各种飞行状态下保持稳定的姿态。
抗干扰能力:无人机在飞行过程中会受到各种外界干扰(如风力、电磁干扰等)。因此,需要设计一定的抗干扰机制来确保无人机的飞行稳定性。
三、无人机路径规划技术
无人机路径规划技术是实现无人机自主飞行的关键。它涉及选择无人机飞行的轨迹和航线,以确保无人机能够安全、高效地完成任务。
1. 路径规划算法
传统算法:包括图搜索算法(如A*、Dijkstra等)、启发式搜索算法等。这些算法通过搜索空间中的节点和路径来找到最优或次优的飞行路径。
基于模型的算法:如模型预测控制(MPC)等。这些算法考虑无人机的动力学特性和环境约束,通过优化问题来求解最优路径。
智能算法:随着机器学习和深度学习技术的发展,智能算法在路径规划领域的应用越来越广泛。这些算法能够通过学习历史数据和实时传感器数据来优化路径规划策略。
2. 路径规划过程
任务分解:将复杂的飞行任务分解为一系列简单的子任务或路径点。
环境感知:通过传感器和地图数据感知飞行环境中的障碍物、地形等信息。
路径规划:根据任务需求和环境信息规划无人机的飞行路径。
路径调整:在飞行过程中根据实时传感器数据和环境变化对路径进行动态调整。
3. 路径规划技术的发展趋势
更高的自主性:无人机路径规划技术的发展趋势主要包括以下几个方面:
一、更高的自主性
随着技术的不断进步,无人机路径规划系统将变得更加智能化和自主化。未来的无人机将能够基于实时传感器数据、环境模型以及任务需求,自主生成并执行最优路径规划,减少对人工干预的依赖。
二、更强的适应性
无人机在执行任务时,往往需要面对复杂多变的环境。未来的路径规划技术将更加注重对环境的适应性,能够在不同地形、气象条件下以及动态障碍物存在的环境中,实时调整路径规划策略,确保无人机的安全和高效飞行。
三、更精准的预测能力
路径规划技术将结合先进的预测算法,如机器学习、深度学习等,对无人机的飞行环境进行更精准的预测。通过对历史数据、实时传感器数据以及环境模型的学习和分析,无人机能够提前感知并规避潜在的风险和障碍物,提高路径规划的安全性和准确性。
四、更高效的计算和优化
随着计算技术的不断发展,无人机路径规划算法的计算效率将得到显著提升。未来的算法将更加注重对计算资源的优化利用,能够在更短的时间内完成复杂的路径规划任务。同时,算法的优化也将更加注重对无人机性能的考虑,确保路径规划结果能够满足无人机的实际飞行需求。
五、多智能体协同规划
在多个无人机协同执行任务时,路径规划技术将更加注重多智能体之间的协同规划。通过信息共享和协同决策,多个无人机能够共同规划出最优的飞行路径和任务分配方案,提高任务执行的效率和成功率。
六、更广泛的应用领域
随着无人机技术的不断成熟和普及,路径规划技术的应用领域也将不断扩大。除了传统的航拍、农业、监测等领域外,无人机还将在物流配送、紧急救援、城市空中交通管理等领域发挥重要作用。这些领域对路径规划技术的需求将推动其不断创新和发展。
综上所述,无人机路径规划技术的发展趋势是向更高自主性、更强适应性、更精准预测能力、更高效计算和优化、多智能体协同规划以及更广泛应用领域等方向迈进。这些趋势将为无人机技术的进一步发展和应用提供更加坚实的基础和支持。
相关文章:
无人机控制和飞行、路径规划技术分析
无人机控制和飞行、路径规划技术是现代无人机技术的核心组成部分,它们共同决定了无人机的性能和应用范围。以下是对这些技术的详细分析: 一、无人机控制技术 无人机控制技术主要涉及飞行控制系统的设计、传感器数据的处理以及指令的发送与执行。飞行控…...

【C++】模拟实现红黑树
🦄个人主页:修修修也 🎏所属专栏:实战项目集 ⚙️操作环境:Visual Studio 2022 目录 一.了解项目功能 二.逐步实现项目功能模块及其逻辑详解 📌实现RBTreeNode类模板 🎏构造RBTreeNode类成员变量 🎏实现RBTreeNode类构…...

离线安装docker
背景描述 项目需要在研发环境虚拟机上安装docker部署应用。 所在的服务器是一个内网,无法访问到外网环境。 服务器OS版本是 麒麟V10 linux 安装docker 安装包下载 获取所需版本的docker binary包,官方链接https://download.docker.com/linux/stati…...

MySQL高阶2066-账户余额
目录 题目 准备数据 分析数据 总结 题目 请写出能够返回用户每次交易完成后的账户余额. 我们约定所有用户在进行交易前的账户余额都为0, 并且保证所有交易行为后的余额不为负数。 返回的结果请依次按照 账户(account_id), 日期( day ) 进行升序排序…...
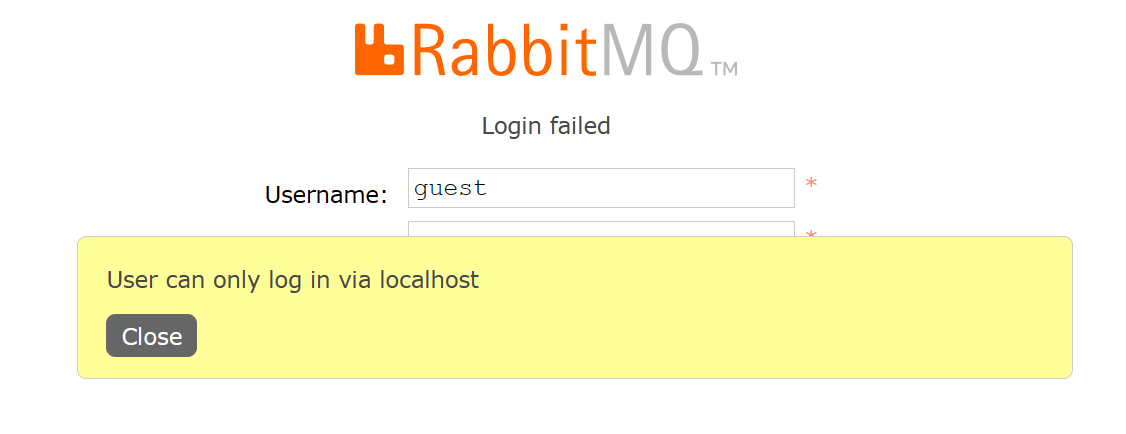
《RabbitMQ篇》Centos7安装RabbitMQ
安装RabbitMQ 安装包网盘下载地址 链接:https://pan.baidu.com/s/1bG_nP0iCdAejkctFp1QztQ?pwd4mlw 先上传安装包到服务器(erlang-23.3.4.11-1.el7.x86_64.rpm和rabbitmq-server-3.9.16-1.el7.noarch.rpm)然后使用指令安装 # 安装 erlang r…...

昇思学习打卡营第31天|深度解密 CycleGAN 图像风格迁移:从草图到线稿的无缝转化
1. 简介 图像风格迁移是计算机视觉领域中的一个热门研究方向,其中 CycleGAN (循环对抗生成网络) 在无监督领域取得了显著的突破。与传统需要成对训练数据的模型如 Pix2Pix 不同,CycleGAN 不需要严格的成对数据,只需两类图片域数据,…...

跟我学C++中级篇——空值的定义
一、空值 在提到c/c的空值时,先扯远一些。谈一谈数学中的0,0的出现要晚于其它的数,而0的出现却引发了数学的极大的发展和进步。而在计算机科学中,在使用一个变量时,它的值的可能性有很多,其中,…...
Mysql 数据库系统全解析)
(三)Mysql 数据库系统全解析
一、Mysql 数据库 数据库的作用和优势 作用:集中化存储结构性的数据。优势: 减小数据冗余,避免数据的重复存储。保证数据的真实有效和唯一性,提高数据的质量。方便数据共享访问,使得不同的用户和应用可以方便地获取所需…...
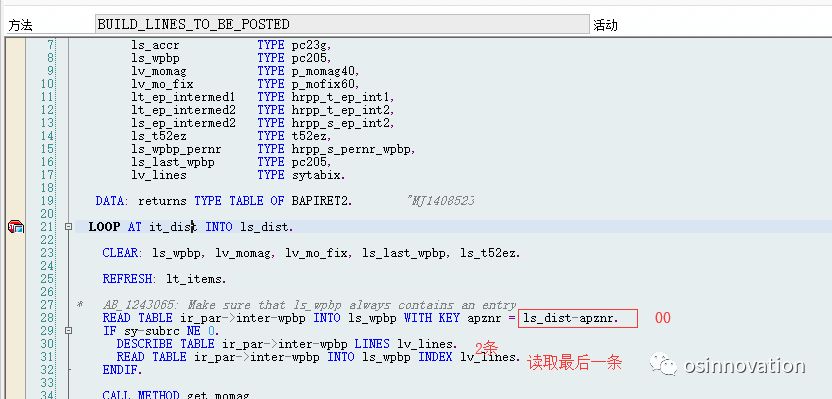
SAP HCM 0001信息类型一个月内有多个成本中心
一般跨部门调动时候,成本中心都会变化,SAP默认都是读取wpbp的最后一一条数据,但是今天过账会读取两个单位的成本中心,一直都觉得很奇怪,SAP如何都拆分出这样的情况, 没办法只有debug,初始化系统…...

字节输入流
1.是什么 字节输入流(Byte Input Stream)在Java中是用来读取原始字节流的数据。Java的java.io包提供了多种字节输入流类,其中InputStream是所有字节输入流类的超类。以下是关于字节输入流的详细解释和举例: 字节输入流的概念&…...

深度学习-----------------机器翻译与数据集
目录 机器翻译与数据集下载和预处理数据集预处理步骤词元化词汇表该部分总代码 固定长度阶段或填充该部分总代码 转换成小批量数据集用于训练训练模型总代码 机器翻译与数据集 import os import torch from d2l import torch as d2l下载和预处理数据集 #save d2l.DATA_HUB[fr…...

SOMEIP_ETS_151: SD_Send_triggerEventUINT8Reliable_Eventgroup_2
测试目的: 验证DUT在Tester订阅事件组后,能够响应Tester触发的triggerEventUINT8Reliable方法,并将TestEventUINT8Reliable事件发送到订阅请求中端点选项指定的IP地址和端口。 描述 本测试用例旨在确保DUT能够正确处理事件组的订阅请求&am…...

32 C 语言指针的长度与运算(指针加减整数、指针自增自减、同类型指针相减、指针的比较运算)
目录 1 指针的长度 2 指针与整数的加减运算 3 指针自增与自减 4 同类型指针相减 5 指针的比较运算 6 测试题 1 指针的长度 在 C 语言中,sizeof 运算符可以用来计算指针的长度。指针的长度实际上与指针所指向的数据类型无关,而是与系统的位数&…...

【系统架构设计师】经典论文:轮软件三层架构设计
更多内容请见: 备考系统架构设计师-核心总结目录 文章目录 摘要正文总结摘要 本人于 2022 年 1 月参与了中石化 XX 油田 XX 采油厂“用电管理系统”的项目建设,该系统建设目标是实现分单位、分线路、分系统评价、优化、考核,全面提升采油厂用 电管理水平。在该项目组中我担…...

(C语言贪吃蛇)13.实现贪吃蛇四方向的移动
目录 前言 原代码预览 解决方法⚠️ 运行效果 总结 前言 我们上节通过Linux线程实现了两个while(1)同时运行,这样就可以一边控制方向一遍刷新出贪吃蛇的身体节点了。本节我们就来实现贪吃蛇四方向的移动。 (此图片为最终效果) 原代码预览 我们之前的代码是通过…...
)
Spring Boot + MyBatis 项目中常用注解详解(万字长篇解读)
Spring Boot MyBatis 项目中常用注解详解 在现代Java开发中,Spring Boot和MyBatis是两大热门框架,广泛应用于构建高效、可维护的企业级应用。两者结合使用,可以充分发挥各自的优势,提高开发效率和代码质量。在这个过程中&#x…...

AWS Network Firewall -NAT网关配置只应许白名单域名出入站
1. 创建防火墙 选择防火墙的归属子网(选择公有子网) 2. 创建规则白名单域名放行 3. 绑定相关规则 继续往下拉 绑定非托管规则 4. 配置网络路由 相关规则 参考图 解释 防火墙的归属公有子网路由表规则机器实例的规则子网路由表规则nat网管路…...

【C语言系统编程】【第二部分:并发编程】2.3 实践与案例分析
2.3 实践与案例分析 2.3.1 案例分析:多线程文件搜索程序 本文中,我们将通过一个多线程文件搜索程序的案例,展示如何在实际项目中应用多线程编程技术,并具体介绍任务分解、线程创建、结果汇总及锁机制的应用。 2.3.1.1 任务分解…...

React -AppVarContext.Provider 提供者组件
AppVarContext.Provider 是一个 React 上下文提供者,通常用于在组件树中提供共享的状态或数据。下面将详细解释 AppVarContext.Provider 的作用和如何使用它。展示如何使用 AppVarContext.Provider 来管理全局状态 1. 什么是上下文(Context)…...

【Python】解密用户代理:使用 Python User Agents 库探索浏览器和设备信息
Python User Agents 是一个专为解析 User Agent 字符串而设计的 Python 库。它能够轻松识别访问设备的类型(如移动设备、桌面设备或平板),并获取设备、浏览器、操作系统等详细信息。借助它,开发者可以更好地了解访问用户的设备属性…...

终极指南:如何3秒破解百度网盘提取码获取难题
终极指南:如何3秒破解百度网盘提取码获取难题 【免费下载链接】baidupankey 项目地址: https://gitcode.com/gh_mirrors/ba/baidupankey 还在为百度网盘分享链接的提取码而烦恼吗?每次找到心仪的学习资料、工作文件或娱乐资源,却卡在…...

3分钟学会使用elan:告别Lean版本混乱的智能版本管理器
3分钟学会使用elan:告别Lean版本混乱的智能版本管理器 【免费下载链接】elan The Lean version manager 项目地址: https://gitcode.com/gh_mirrors/el/elan 还在为不同Lean项目需要不同版本而头疼吗?elan作为Lean定理证明器的智能版本管理器&…...

3分钟掌握PlantUML Editor:用代码思维绘制专业UML图表的终极指南
3分钟掌握PlantUML Editor:用代码思维绘制专业UML图表的终极指南 【免费下载链接】plantuml-editor PlantUML online demo client 项目地址: https://gitcode.com/gh_mirrors/pl/plantuml-editor 还在为复杂的UML图表绘制而烦恼吗?传统的拖拽式绘…...

魔改frida-server实现反检测:从行为消除到可检测性归零
1. 为什么魔改frida-server比写检测绕过代码更根本?在Android逆向与安全测试一线干了十多年,我见过太多团队把精力耗在“检测逻辑对抗”上:写一堆Java层的isFridaPresent()、Native层的checkFridaPort()、甚至用ptrace自检父进程——结果呢&a…...

《从 0 实现 SGLang》第 1 篇 · LLM 推理引擎到底在做什么
千行代码,一步步搭出一个现代 LLM 推理引擎,吃透大模型推理的每一项关键技术。 本阶段目标 — 最简推理实现 用最朴素的方式把端到端推理跑通:先搭起整体框架,再逐个模块替换为完整实现。整个阶段共 5 篇短文: 序号…...

GPT5.5每次推理只激活部分参数MoE路由策略完整拆解
做多模型架构对比测试时用了cc.877ai.cn这个AI模型聚合平台,一站接入多个模型方便对比不同架构策略在实际任务中的表现差异。GPT-5.5是OpenAI首个从零完整重训的基础模型。大多数人关注"变强了多少"但更值得关注的是"怎么变强的"。MoE路由策略是…...

提示词失效?双色调渲染偏色?深度解析Midjourney色彩空间转换机制,精准锁定sRGB→Lab双色域锚点
更多请点击: https://codechina.net 第一章:提示词失效?双色调渲染偏色?深度解析Midjourney色彩空间转换机制,精准锁定sRGB→Lab双色域锚点 当用户在Midjourney中输入高饱和度提示词(如“vibrant cyan neo…...

【ElevenLabs新疆话语音落地实战】:20年语音AI专家亲授3大合规适配难点与5步部署清单
更多请点击: https://kaifayun.com 第一章:ElevenLabs新疆话语音落地的背景与战略价值 随着国家“东数西算”工程纵深推进和多语种人工智能基础设施建设提速,维吾尔语作为我国重要的少数民族语言之一,其语音合成技术的自主可控与…...

华为MetaERP在全球化部署方面具有以下显著优势
华为MetaERP在全球化部署方面具有以下显著优势:1. 全栈自主技术,无“卡脖子”风险根技术自主可控:MetaERP基于华为自主研发的欧拉操作系统、高斯数据库、昇腾AI算力等全栈技术栈,完全摆脱对西方ERP系统的依赖,满足全球…...

【Midjourney拟物化风格实战指南】:20年视觉设计专家亲授3大材质渲染公式与5步出图工作流
更多请点击: https://kaifayun.com 第一章:拟物化风格的本质与Midjourney语义解码 拟物化(Skeuomorphism)并非简单的视觉仿拟,而是一种通过材质、光影、物理反馈等多维语义锚点唤起用户认知惯性的交互范式。在AI图像生…...