基于ROS的激光雷达点云物体检测
环境
RTX 2060(后面关于算力)
ubuntu 18.04
ROS melodic (ubuntu 18.04安装ROS melodic可以参看我这篇文章ubuntu 18.04安装ROS系统)
CUDA 10.0
cudnn 7.6.5
caffe
cmake 3.18.0(不能低于3.12.2)
opencv 3.4.3
安装
ubuntu 18.04、ROS melodic 、CUDA 10.0、cudnn 7.6.5安装在此就不赘述。
1、caffe安装
安装依赖项
sudo apt-get install -y libopencv-dev
sudo apt-get install -y build-essential cmake git pkg-config
sudo apt-get install -y libprotobuf-dev libleveldb-dev libsnappy-dev libhdf5-serial-dev protobuf-compiler
sudo apt-get install -y liblapack-dev
sudo apt-get install -y libatlas-base-dev
sudo apt-get install -y --no-install-recommends libboost-all-dev
sudo apt-get install -y libgflags-dev libgoogle-glog-dev liblmdb-dev
sudo apt-get install -y python-numpy python-scipy
sudo apt-get install -y python3-pip
sudo apt-get install -y python3-numpy python3-scipy
下载caffe开源软件项目(一定要在下载到home文件目录下)
cd ~
git clone https://gitee.com/hejuncheng1/caffe.git
进入caffe/python/目录下,执行下面的命令,下载依赖的软件 。
cd caffe/python/
for req in $(cat requirements.txt); do pip3 install $req; done
下载到Downloads下
git clone https://github.com/AbangLZU/cnn_seg_lidar.git
将下载下来源码里面的Makefile.config复制到caffe文件夹下

 更改Makefile.config里面的部分内容
更改Makefile.config里面的部分内容
改为(这部分算力根据自己显卡型号来哈):
CUDA_ARCH := -gencode arch=compute_30,code=sm_30 \-gencode arch=compute_35,code=sm_35 \-gencode arch=compute_50,code=sm_50 \-gencode arch=compute_52,code=sm_52 \-gencode arch=compute_60,code=sm_60 \-gencode arch=compute_61,code=sm_61 \-gencode arch=compute_61,code=compute_61
改为(根据自己OpenCV版本来,我的是3.2.0):
#OPENCV_VERSION :=3
改为
OPENCV_VERSION :=3
编译caffe
make -j8
make distribute

再编译本项目
首先要对源码做一部分修改(修改数据的topic,以便检测算法能读取数据):
修改cnn_seg_lidar/src/lidar_cnn_seg_detect/nodes/cnn_segmentation.cpp

修改完后就可以在项目文件夹cnn_seg_lidar下编译了:
catkin_make
报错:
相关文章:
基于ROS的激光雷达点云物体检测
环境 RTX 2060(后面关于算力) ubuntu 18.04 ROS melodic (ubuntu 18.04安装ROS melodic可以参看我这篇文章ubuntu 18.04安装ROS系统) CUDA 10.0 cudnn 7.6.5 caffe cmake 3.18.0(不能低于3.12.2) opencv 3…...

大模型训练环境搭建
硬件资源说明 本教程基于GPU 3090的服务器 资源类型 型号 核心指标 CPU Intel(R) Xeon(R) Bronze 3204 CPU 1.90GHz 12核 内存 / 125Gi GPU NVIDIA GeForce RTX 3090 24G显存 注意:接下来的部分命令需要使用科学上网,需要事先配置好。 安…...

使用Java调用GeoTools实现全球国家矢量数据入库实战
目录 前言 一、相关数据介绍 1、无空间参考的数据 2、有空间参考的数据 3、空间信息表物理模型 二、全球国家空间数据入库 1、后台实体类图 2、后台实体对象关键代码 三、时空数据入库实践 1、读取无空间参考数据 2、入库成果及注意事项 四、总结 前言 在当今世界&…...

计算机毕业设计 基于Python的广东旅游数据分析系统的设计与实现 Python+Django+Vue Python爬虫 附源码 讲解 文档
🍊作者:计算机编程-吉哥 🍊简介:专业从事JavaWeb程序开发,微信小程序开发,定制化项目、 源码、代码讲解、文档撰写、ppt制作。做自己喜欢的事,生活就是快乐的。 🍊心愿:点…...

Springboo通过http请求下载文件到服务器
这个方法将直接处理从URL下载数据并将其保存到文件的整个过程。下面是一个这样的方法示例: import java.io.FileOutputStream; import java.io.IOException; import java.io.InputStream; import java.io.OutputStream; import java.net.HttpURLConnection…...

使用CSS实现酷炫加载
使用CSS实现酷炫加载 效果展示 整体页面布局 <div class"container"></div>使用JavaScript添加loading加载动画的元素 document.addEventListener("DOMContentLoaded", () > {let container document.querySelector(".container&q…...
【STM32-HAL库】AHT10温湿度传感器使用(STM32F407ZGT6配置i2c)(附带工程下载连接)
一、温湿度传感器: 温湿度传感器是一种能够检测环境中的温度和湿度,并将其转化为电信号输出的装置。它在智能家居、工业自动化、气象监测、农业等领域有着广泛的应用。 原理: 温湿度传感器通常基于不同的物理原理,以下是一些常见…...

深入理解网络通信: 长连接、短连接与WebSocket
在现代网络应用开发中,选择合适的通信方式对于应用的性能、效率和用户体验至关重要。本文将深入探讨三种常见的网络通信方式:长连接、短连接和WebSocket,分析它们的特点、区别以及适用场景。 1. 短连接 © ivwdcwso (ID: u012172506) 1.1 定义 短连接是指客户端和服务器…...

Linux·环境变量与进程地址空间
1. 命令行参数 各位可能见过main函数也是有参数的,只是我们平时写的代码都比较简单,用不到main函数的参数,下面我们看一下main函数的参数是什么又是怎么用的 我们看这样一段代码 其编译运行后的效果是这样的 我们将main函数后面的那两个参数叫…...

MYSQL 乐观锁
乐观锁是一种用于处理并发控制的策略,特别适用于读多写少的场景。在 MySQL 数据库中,乐观锁通常通过版本号或时间戳来实现。下面将详细介绍乐观锁的概念、实现方式以及在 MySQL 中的应用。 1. 乐观锁的概念 乐观锁的基本思想是:在对数据进行…...
全局过滤器和跨域)
SpringCloud入门(十二)全局过滤器和跨域
一、全局过滤器 全局过滤器的作用也是处理一切进入网关的请求和微服务响应,与GatewayFilter的作用一样。 区别在于GatewayFilter通过配置定义,处理逻辑是固定的,如果我们希望拦截请求,做自己的业务逻辑则没办法实现。而GlobalFilt…...

51单片机系列-按键检测原理
🌈个人主页:羽晨同学 💫个人格言:“成为自己未来的主人~” 独立按键是检测低电平的。 下面我们来看一张对应的电路原理图: 在这张图当中,P1,P2,P3内部都上拉了电阻,但是P0没有&am…...

基于元神操作系统实现NTFS文件操作(五)
1. 背景 本文主要介绍$Root元文件的解析。先介绍元文件的构成及各个部分的结构,然后结合上一篇博文中读取到的元文件内容,对测试磁盘中目标分区的根目录进行展示。 2. $Root元文件解析 (1)$Root元文件的结构 $Root元文件由两部…...
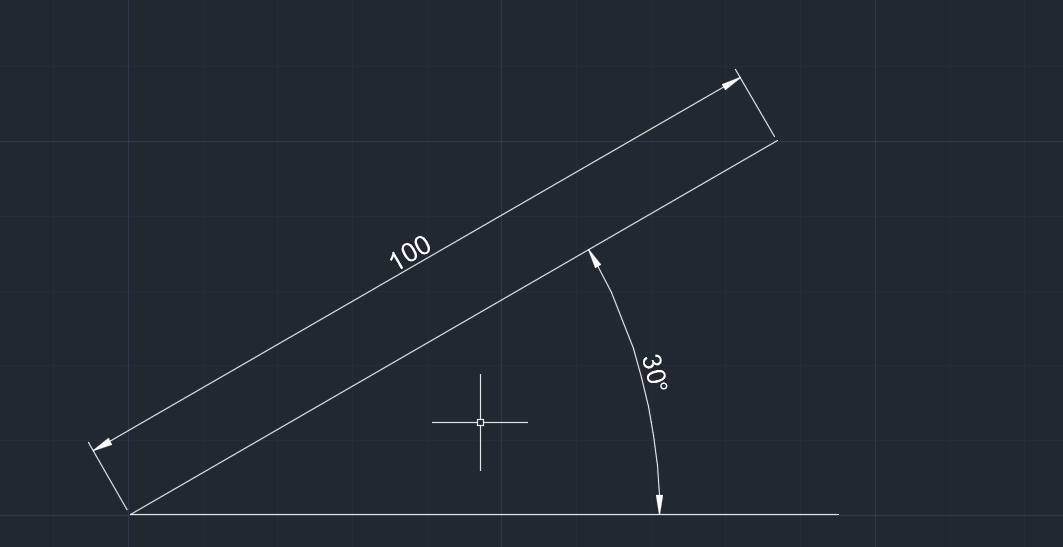
AutoCAD学习
AutoCAD学习 最基本操作 命令用途说明空格键确认键也可以是重复刚才的命令回车键也是确认键鼠标右键也可以选择确认LINE、L直线命令绘制直线DLI线性尺寸标注DIMLINEAR鼠标滚轮滚动放大缩小视图界面鼠标中键按住移动视图DAL对齐线性标注DIMALIGNED F8 正交模式ORTHOMODE Tab 切换…...

go的一些知识点
一.package 1.新建项目 新建一个itying文件夹,在里面使用命令 就能生成一个go项目。生成一个go.mod 2.调用别的包的代码 按照下面的目录层级生成代码 //clac.go package calcfunc Add(x, y int) int {return x y } func Sub(x, y int) int {return x - y }…...

前端 vue3 对接科大讯飞的语音在线合成API
主要的功能就是将文本转为语音,可以播放。 看了看官方提供的demo,嗯....没看懂。最后还是去网上找的。 网上提供的案例,很多都是有局限性的,我找的那个他只能读取第一段数据,剩下的不读取。 科大讯飞的接口…...

缺省参数
一、概念 在声明或定义函数时为函数的参数指定一个默认值,调用时,如果对应参数没有传参,则使用其默认值,否则使用指定的实参 void TestFunc(int a 0) {cout<<a<<endl; }int main() {TestFunc(); // 没有传参&am…...
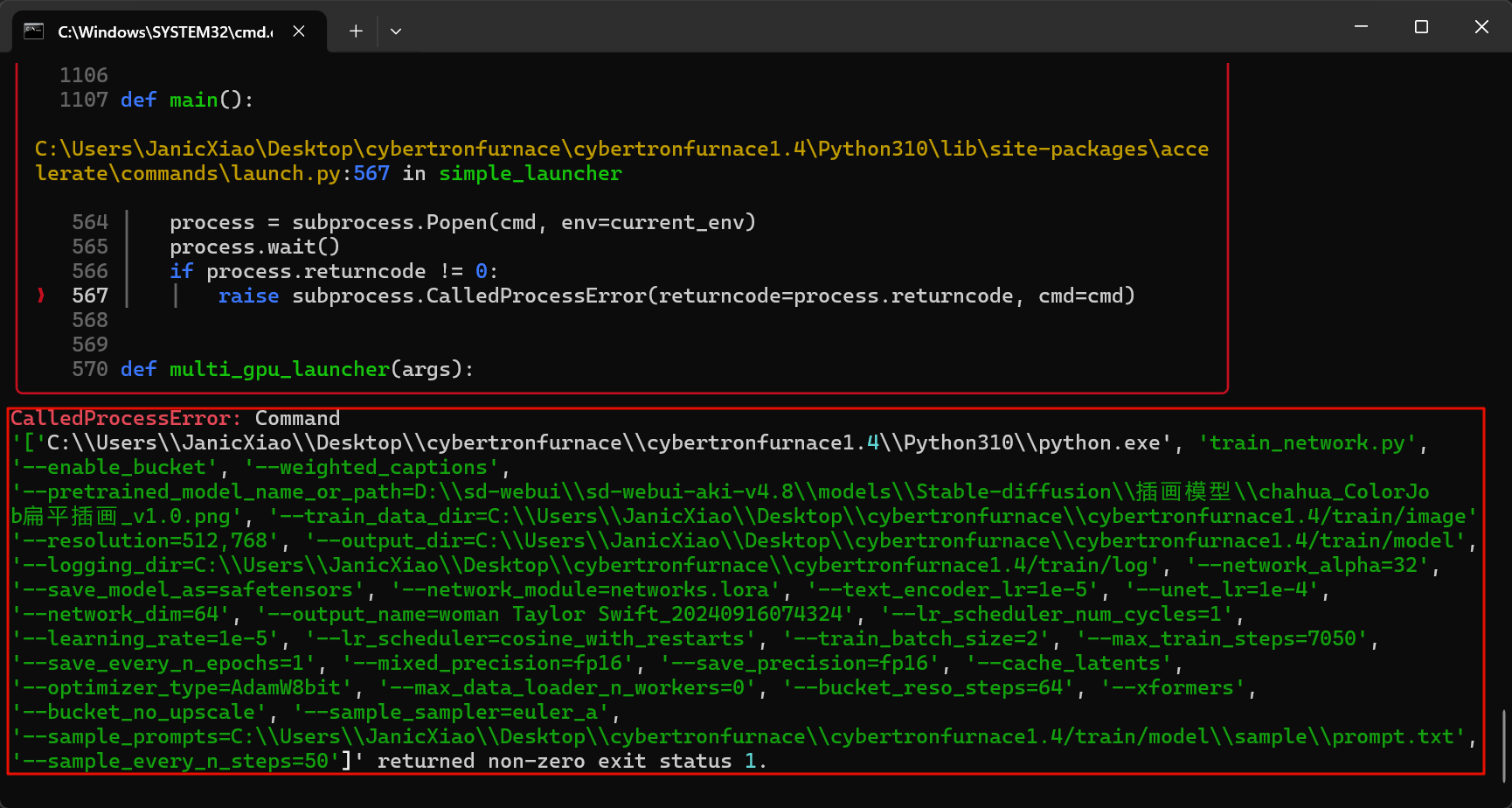
Stable Diffusion绘画 | 来训练属于自己的模型:炼丹启动
经过前面几轮辛苦的准备工作之后,现在开始进入终篇的炼丹环节。 在「上传素材」页面,点击「开始训练」: 可以在「查看进度-进度」中,查看模型训练的整体进度: 求助!!!操作「开始训练…...

08_OpenCV文字图片绘制
import cv2 import numpy as npimg cv2.imread(image0.jpg,1) font cv2.FONT_HERSHEY_SIMPLEXcv2.rectangle(img,(500,400),(200,100),(0,255,0),20) # 1 dst 2 文字内容 3 坐标 4 5 字体大小 6 color 7 粗细 8 line type cv2.putText(img,flower,(200,50),font,1,(0,0,250)…...

【笔记】选择题笔记+数据结构笔记
文章目录 2014 41方法一先序遍历方法二 连通分量是极大连通子图 一个连通图的生成树是一个极小连通子图 无向图的邻接表中,第i个顶点的度为第i个链表中的结点数 邻接表和邻接矩阵对不同的操作各有优势。 最短路径算法: 单源最短路径 已知图G(V,E),我们…...

Kimi LeetCode 2547. 拆分数组的最小代价 C++实现
这道题的核心思路是动态规划 记忆化搜索。我们定义 dfs(i) 为从下标 i 开始拆分数组的最小代价,答案即为 dfs(0)。关键观察子数组的重要性 k trimmed(subarray).length。其中 trimmed 操作会移除子数组中只出现一次的数字。如果我们用 cnt[x] 记录数字 x 在当前子…...

凡亿AD22--AD软件泪滴的添加与移除
一、泪滴的基础认知1.1 泪滴的定义泪滴是PCB设计中,在走线与焊盘、走线与过孔(导孔)连接位置添加的「圆弧状或渐变状过渡结构」,本质是连接部位的“过渡加固层”,肉眼可见为类似水滴或圆弧的形态,核心作用是…...
)
印度市场语音产品上线倒计时!ElevenLabs印地文TTS合规指南(含RBI语音存储规范、UIDAI语音采集红线)
更多请点击: https://codechina.net 第一章:印度市场语音产品上线倒计时!ElevenLabs印地文TTS合规指南(含RBI语音存储规范、UIDAI语音采集红线) 面向印度市场的语音合成产品上线前,必须严格遵循印度央行&a…...

对比直接调用与通过 Taotoken 调用的稳定性体验差异
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接调用与通过 Taotoken 调用的稳定性体验差异 作为一名长期使用各类大模型 API 的开发者,我在构建和运维应用时&…...

私有化视频会议平台/视频高清直播点播EasyDSS构建智慧校园音视频协作新生态
在教育数字化转型的关键阶段,智慧校园对音视频协作系统的需求,已从基础的远程沟通,升级为安全可控、体验流畅、管理智能的一体化解决方案。视频直播点播平台EasyDSS凭借技术创新与场景深耕,成为智慧校园建设的核心支撑,…...

虚实融合新纪元:UWB物理锚点 vs 镜像视界数维空间无感定位
虚实融合新纪元:UWB物理锚点 vs 镜像视界数维空间无感定位虚实融合产业正从“物理锚点绑定”迈向“数维空间原生映射”新纪元。UWB以基站与标签构建刚性物理坐标体系,是虚实同步的硬件依赖范式;镜像视界浙江科技有限公司以纯视觉AI重构空间感…...

如何用嘎嘎降AI处理心理学论文:心理学研究生毕业论文降AI4.8元完整操作教程
如何用嘎嘎降AI处理心理学论文:心理学研究生毕业论文降AI4.8元完整操作教程 关于心理学论文降AI教程,有几个细节提前知道能少走很多弯路。 核心用嘎嘎降AI(www.aigcleaner.com),4.8元,达标率99.26%。这篇…...

MailHog邮件测试工具:开发者的SMTP调试终极解决方案
MailHog邮件测试工具:开发者的SMTP调试终极解决方案 【免费下载链接】MailHog Web and API based SMTP testing 项目地址: https://gitcode.com/gh_mirrors/ma/MailHog 作为现代软件开发过程中不可或缺的一环,邮件功能测试常常让开发者头疼不已。…...

ARM BRBE技术:硬件级控制流分析与优化
1. ARM分支记录缓冲区扩展(BRBE)技术概述在现代处理器架构中,控制流信息的捕获对于性能分析和代码优化至关重要。ARM分支记录缓冲区扩展(Branch Record Buffer Extension, BRBE)是ARMv8/v9架构中引入的一项硬件特性,它通过专用硬件机制记录程序执行过程中…...

如何快速掌握NarratoAI:AI视频解说自动化的完整教程
如何快速掌握NarratoAI:AI视频解说自动化的完整教程 【免费下载链接】NarratoAI 利用AI大模型,一键解说并剪辑视频; Using AI models to automatically provide commentary and edit videos with a single click. 项目地址: https://gitcod…...