【路径规划】多机器人路径规划

摘要
多机器人路径规划在现代自动化、仓储管理及智能交通系统中有着广泛的应用。本文提出了一种基于A*算法的多机器人路径规划方法,旨在解决多机器人在同一环境中的路径冲突问题。通过采用启发式搜索和路径优化策略,机器人能够在保持避障的前提下实现最优路径规划。实验结果表明,该方法在复杂环境中能够有效降低机器人路径规划的时间复杂度,并避免机器人之间的碰撞。
理论
多机器人路径规划(Multi-Robot Path Planning, MRPP)是机器人学中的一个重要问题,其核心目标是在多机器人系统中为每个机器人规划一条从起点到终点的无碰撞路径。常见的路径规划算法包括Dijkstra算法、A*算法以及其改进版。为了实现多机器人路径规划,需要解决以下问题:
-
避障问题:规划路径必须确保机器人不会与环境中的障碍物相撞。
-
避免路径冲突:多个机器人在同一时间段内可能会经过同一地点,需采用策略避免冲突。
-
全局最优性:算法不仅需要为单个机器人规划最优路径,还需要在系统层面保证多机器人路径的整体最优性。
A*算法是一种经典的启发式搜索算法,在路径规划中表现出色。其核心思想是通过启发函数 𝑓(𝑛)=𝑔(𝑛)+ℎ(𝑛),其中𝑔(𝑛)为起点到节点,𝑛的实际代价, ℎ(𝑛)为节点,𝑛到终点的启发式估计代价。对于多机器人系统,可以通过优先考虑时间顺序以及空间区域的方式,保证多个机器人能够协调前进。
实验结果
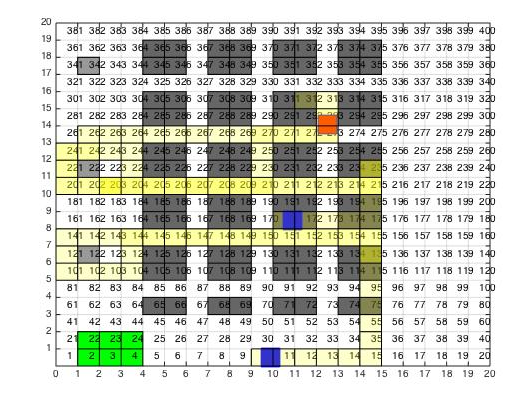
实验通过MATLAB对多机器人路径规划进行了仿真。设置一个20x20的网格地图,黑色区域代表障碍物,绿色为机器人起始点,黄色为规划出的机器人路径,红色为终点。多个机器人在路径规划过程中能够避免与障碍物及其他机器人碰撞。
仿真结果表明,使用A*算法能够为每个机器人有效地规划路径,并在一定时间内完成多机器人的路径规划,避免了机器人的路径冲突。
部分代码
% 初始化地图
map = zeros(20,20); % 创建20x20地图
map(1:3,1:5) = 1; % 设置障碍物
map(6:10,10) = 1; % 更多障碍物% 定义机器人起点和终点
start = [2, 1]; % 机器人1起点
goal = [14, 14]; % 机器人1终点% 调用A*算法函数
path = Astar(map, start, goal);% 显示结果
figure;
imshow(map, 'InitialMagnification', 'fit');
hold on;
plot(path(:,2), path(:,1), 'r', 'LineWidth', 2); % 绘制路径
hold off;% A*算法实现
function path = Astar(map, start, goal)% 初始化[rows, cols] = size(map);open_list = [];closed_list = zeros(rows, cols);% 将起点放入open_listopen_list = [open_list; start, 0, heuristic(start, goal)];while ~isempty(open_list)% 找到当前开销最低的节点[~, idx] = min(open_list(:, 3));current = open_list(idx, :);open_list(idx, :) = []; % 从open_list中删除% 检查是否到达目标if isequal(current(1:2), goal)path = reconstruct_path(current);return;end% 获取邻居节点neighbors = get_neighbors(current(1:2), rows, cols);for i = 1:size(neighbors, 1)neighbor = neighbors(i, :);if map(neighbor(1), neighbor(2)) == 1 || closed_list(neighbor(1), neighbor(2))continue; % 忽略障碍物和已访问节点endtentative_g = current(4) + 1; % 假设代价为1open_list = [open_list; neighbor, tentative_g, tentative_g + heuristic(neighbor, goal)];endclosed_list(current(1), current(2)) = 1; % 标记已访问enderror('无法找到路径');
end% 启发函数(曼哈顿距离)
function h = heuristic(pos, goal)h = abs(pos(1) - goal(1)) + abs(pos(2) - goal(2));
end% 生成邻居节点
function neighbors = get_neighbors(pos, rows, cols)directions = [0 1; 1 0; 0 -1; -1 0];neighbors = [];for i = 1:4new_pos = pos + directions(i, :);if new_pos(1) > 0 && new_pos(1) <= rows && new_pos(2) > 0 && new_pos(2) <= colsneighbors = [neighbors; new_pos];endend
end% 重建路径
function path = reconstruct_path(current)path = current(1:2);
end
参考文献
❝
Silver, D., "Cooperative Pathfinding," AI Game Programming Wisdom 3, 2006.
Hart, P. E., Nilsson, N. J., & Raphael, B., "A Formal Basis for the Heuristic Determination of Minimum Cost Paths," IEEE Transactions on Systems Science and Cybernetics, 1968.
LaValle, S. M., "Planning Algorithms," Cambridge University Press, 2006.

相关文章:
【路径规划】多机器人路径规划
摘要 多机器人路径规划在现代自动化、仓储管理及智能交通系统中有着广泛的应用。本文提出了一种基于A*算法的多机器人路径规划方法,旨在解决多机器人在同一环境中的路径冲突问题。通过采用启发式搜索和路径优化策略,机器人能够在保持避障的前提下实现最…...

深度学习Day-35:One-hot独热编码
🍨 本文为:[🔗365天深度学习训练营] 中的学习记录博客 🍖 原作者:[K同学啊 | 接辅导、项目定制] 一、 独热编码原理 独热编码(One-Hot Encoding)是一种将分类数据转换为二进制向量的方法&#…...

Streamlit 实现登录注册验证
在开发基于 Streamlit 的应用时,用户认证功能是一个常见需求。本文将介绍如何通过两种方式来实现登录注册功能:手动实现 和 使用 Streamlit-Authenticator 库。手动实现虽然灵活,但需要自行处理密码加密、验证等细节;而 Streamlit…...

ASP.NET Zero 多租户介绍
ASP.NET Zero 是一个基于 ASP.NET Core 的应用程序框架,它提供了多租户支持,以下是关于 ASP.NET Zero 多租户的介绍: 一、多租户概念 多租户是一种软件架构模式,允许多个客户(租户)共享同一套软件应用程序…...

【60天备战2024年11月软考高级系统架构设计师——第29天:微服务架构——微服务的优缺点】
微服务架构通过将大型单体应用拆分为多个独立的小型服务,使系统具备灵活性、可扩展性和独立部署的优势。但与此相伴的是复杂的运维和开发管理挑战。因此,在选择微服务架构时,架构师需仔细权衡其优势与劣势。 微服务架构的优点 独立部署&…...

读论文、学习时 零碎知识点记录01
1.入侵检测技术 2.深度学习、机器学习相关的概念 ❶注意力机制 ❷池化 ❸全连接层 ❹Dropout层 ❺全局平均池化 3.神经网络中常见的层...

图解C#高级教程(一):委托
什么是委托 可以认为委托是持有一个或多个方法的对象。但它与对象不同,因为委托可以被执行。当执行委托时,委托会执行它所“持有”的方法。先看一个完整的使用示例。 // See https://aka.ms/new-console-template for more informationdelegate void M…...

CMSIS-RTOS V2封装层专题视频,一期视频将常用配置和用法梳理清楚,适用于RTX5和FreeRTOS(2024-09-28)
【前言】 本期视频就一个任务,通过ARM官方的CMSIS RTOS文档,将常用配置和用法给大家梳理清楚。 对于初次使用CMSIS-RTOS的用户来说,通过梳理官方文档,可以系统的了解各种用法,方便大家再进一步的自学或者应用&#x…...

渗透测试入门学习——使用python脚本自动识别图片验证码,OCR技术初体验
写在前面 由于验证码在服务端生成后存储在服务器的session中,而标用于标识用户身份的sessionid存在于用户cookie中 所以本次识别验证码时需要用requests.session()创建会话对象,模拟真实的浏览器行为,保持与服务器的会话才能获取登录时服务…...

docker环境下配置cerbot获取免费ssl证书并自动续期
文章目录 实践场景了解certbot查看nginx的映射情况操作目标配置nginx配置的ssl证书设置自动续签 实践场景 本人使用docker部署了一个nginx容器,通过容器卷,实现本地html,ssl,conf和ngiinx容器映射的, 经常需要手动部署…...

Studying-多线程学习Part1-线程库的基本使用、线程函数中的数据未定义错误、互斥量解决多线程数据共享问题
来源:多线程编程 线程库的基本使用 两个概念: 进程是运行中的程序线程是进程中的进程 串行运行:一次只能取得一个任务并执行这一个任务 并行运行:可以同时通过多进程/多线程的方式取得多个任务,并以多进程或多线程…...
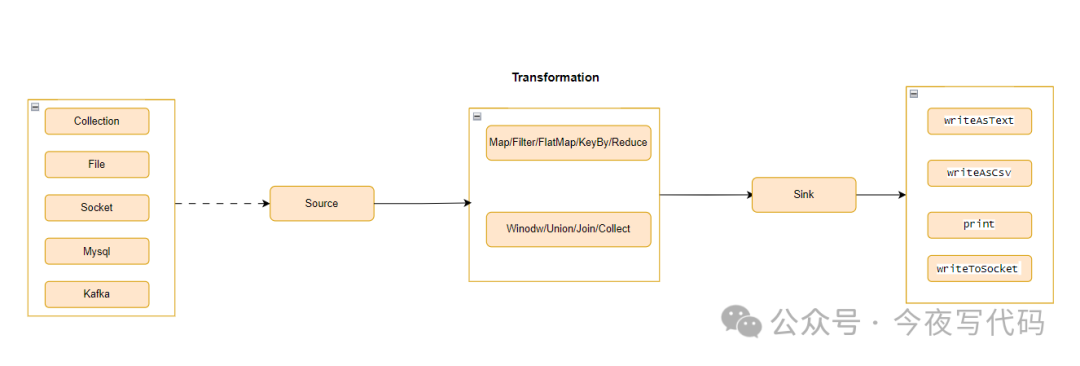
Flink 03 | 数据流基本操作
Flink数据流结构 DataStream 转换 通常我们需要分析的业务数据可能存在如下问题: 数据中包含一些我们不需要的数据 数据格式不方面分析 因此我们需要对原始数据流进行加工,比如过滤、转换等操作才可以进行数据分析。 “ Flink DataStream 转换主要作…...

在 TS 的 class 中,如何防止外部实例化
在 TypeScript(TS)中,如果你想要防止一个类被外部实例化,你可以采取以下几种策略: 将构造函数设为私有(Private Constructor): 通过将类的构造函数设为私有,你可以阻止外…...

HTML详解
HTML 基础HTML 标题HTML 段落HTML 链接HTML 图片HTML 元素HTML 注释HTML 属性HTML 文本格式化HTML 头部HTML cssHTML 表格HTML 列表HTML 自定义列表HTML 区块HTML 表单HTML 框架HTML 颜色HTML 脚本HTML 事件HTML 实体HTML urlHTML5 新元素 新元素 新元素 新元素 新元素 新元素 …...

记录|Modbus-TCP产品使用记录【德克威尔】
目录 前言一、德克威尔1.1 实验图1.2 DECOWELL IO Tester 软件1.3 读写设置1.4 C#进行Modbus-TCP读写 更新时间 前言 参考文章: 使用的第二款Modbus-TCP产品。 一、德克威尔 1.1 实验图 1.2 DECOWELL IO Tester 软件 这也是自带模块配置软件的。下图就是德克威尔的…...

基于深度学习的视频生成
基于深度学习的视频生成是一项极具前景的技术,旨在通过神经网络模型生成逼真的动态视频内容。随着生成对抗网络(GANs)、自回归模型、变分自编码器(VAEs)等深度学习模型的发展,视频生成技术已经取得了显著进…...

TB6612电机驱动模块(STM32)
目录 一、介绍 二、模块原理 1.原理图 2.电机驱动原理 三、程序设计 main.c文件 Motor.h文件 Motor.c文件 四、实验效果 五、资料获取 项目分享 一、介绍 TB6612FNG 是东芝半导体公司生产的一款直流电机驱动器件,它具有大电流 MOSFET-H 桥结构ÿ…...

webpack信息泄露
先看看webpack中文网给出的解释 webpack 是一个模块打包器。它的主要目标是将 JavaScript 文件打包在一起,打包后的文件用于在浏览器中使用,但它也能够胜任转换、打包或包裹任何资源。 如果未正确配置,会生成一个.map文件,它包含了原始JavaScript代码的映…...

启动服务并登录MySQL9数据库
【图书推荐】《MySQL 9从入门到性能优化(视频教学版)》-CSDN博客 《MySQL 9从入门到性能优化(视频教学版)(数据库技术丛书)》(王英英)【摘要 书评 试读】- 京东图书 (jd.com) Windows平台下安装与配置MyS…...

微服务_3.微服务保护
文章目录 一、微服务雪崩及解决方法1.1、超时处理1.2、仓壁模式1.3、断路器1.4、限流 二、Sentinel2.1、流量控制2.1.1、普通限流2.1.2、热点参数限流 2.2、线程隔离2.3、熔断降级2.3.1、断路器状态机2.3.2、断路器熔断策略2.3.2.1、慢调用2.3.2.2、异常比例,异常数…...

手语数字人技术详解:3D 动画生成、动作自然度优化与实时渲染工程实践
一、前言:手语数字人是 AI 手语翻译的 “最后一公里”在国家信息无障碍政策推动下,AI 手语翻译已从技术实验走向大规模落地。但手语不是文字替换,而是身体动作、手部姿态、面部表情、口型同步的综合表达。传统手语生成普遍存在三大问题&#…...

《ROS 2机器人开发从入门到实践》 2.3 使用功能包组织C++节点
简介: 上一小节我们用功能包组织了python节点,这节我们把C节点也装进功能包。 参考资料: 参考资料均来自于鱼香ROS社区创始人小鱼,资源如下: ①:【《ROS 2机器人开发从入门到实践》 2.3 使用功能包组织…...

赛事直播预告|高含金量智能车竞赛,邀你逐梦无人驾驶赛道!
简 介: 第二十一届全国大学生智能汽车竞赛创意组"智慧城市Robotaxi挑战赛"即将启动。作为教育部认可的A类国家级学科竞赛,赛事聚焦纯视觉无人驾驶技术,依托百度多模态能力与边缘AI算力,考验参赛者的视觉、语言、执行融合…...

RISC-V双芯架构在智慧燃气报警器中的系统级设计与工程实践
1. 项目概述:当RISC-V芯遇上智慧燃气最近在深圳的智慧燃气发展论坛上,我注意到一家叫微五科技的芯片设计公司,他们带来了一套挺有意思的解决方案。核心不是别的,正是当下在嵌入式领域越来越火的RISC-V架构。他们这次重点展示的&am…...

从PME消息到唤醒中断:图解Linux内核处理PCIe设备唤醒的完整链条与潜在陷阱
从PME消息到唤醒中断:图解Linux内核处理PCIe设备唤醒的完整链条与潜在陷阱 当一块NVMe SSD在深夜的服务器机柜中突然闪烁起状态灯,或是数据中心网卡因流量激增从节能模式苏醒时,PCIe总线上正上演着一场精密的电子芭蕾。这场唤醒仪式的核心角色…...

5步实现Windows直接安装Android应用:APK Installer完全指南
5步实现Windows直接安装Android应用:APK Installer完全指南 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾经想过,在Windows电脑上安装…...

2026年京东云OpenClaw/Hermes Agent配置Token Plan部署详细教程
2026年京东云OpenClaw/Hermes Agent配置Token Plan部署详细教程。OpenClaw是开源的个人AI助手,Hermes Agent则是一个能自我进化的AI智能体框架。阿里云提供计算巢、轻量服务器及无影云电脑三种部署OpenClaw 与 Hermes Agent的方案、百炼Token Plan兼容主流 AI 工具&…...

Linux内核hrtimer高精度定时器深度解析与驱动开发实战
1. 项目概述与核心价值在Linux内核驱动开发中,定时器是一个再基础不过的组件。从早期的timer_list到如今的高精度定时器hrtimer,内核为我们提供了越来越精细的时间控制能力。今天,我们不谈那些老生常谈的基础用法,而是深入内核源码…...

怎么远程操作另一台手机 手机能远程控制别的手机吗
想远程操作另一台手机应急?不管是忘带工作机需回复客户消息,还是手游玩家用备用机远程控制主力机挂机领福利,都需要好用的工具。市面上能远程操作另一台手机的软件不少,但是却多有短板,难以适配需求。推荐无界趣连2.0&…...
)
告别C盘焦虑!保姆级教程:在D盘为VS2013安个家(附阿里云/百度网盘下载)
告别C盘焦虑!VS2013高效安装与磁盘管理全指南 对于刚接触编程的新手来说,Visual Studio 2013(简称VS2013)是一个功能强大且友好的开发环境。然而,许多用户在安装过程中常常忽略了一个关键问题——安装路径的选择。本文…...