SolidWorks机器转ROS2 URDF
文章目录
- 开发环境
- SolidWords插件使用
- 生成urdf文件之后的处理
- CMakeLists文件修改
- package.xml变更
- Launch更改
- 运行
开发环境
Linux系统:Ubuntu 22.04
Ros2版本:humble
Solidwords版本:2023 (2019以上版本应该都是可以的)
SolidWords插件:sw_urdf_exporter 下载
SolidWords插件使用
该功能已经有很多教程,这里不再累述。请移步此处链接
生成urdf文件之后的处理
CMakeLists文件修改
ROS2中已经没有catkin_make这样的工具,统一使用colcon来进行编译,可以看到cmake文件中包含了catkin_make。所以需要先更改此处的文件。更改之前的文件为
cmake_minimum_required(VERSION 2.8.3)project(QY2023-00019)find_package(catkin REQUIRED)catkin_package()find_package(roslaunch)foreach(dir config launch meshes urdf)install(DIRECTORY ${dir}/DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/${dir})
endforeach(dir)
需变更为,项目名与需要构建成的包名一致
cmake_minimum_required(VERSION 3.5)project(urdf_robot)find_package(ament_cmake REQUIRED)install(DIRECTORY images launch meshes rviz urdfDESTINATION share/${PROJECT_NAME}
)if(BUILD_TESTING)find_package(ament_lint_auto REQUIRED)ament_lint_auto_find_test_dependencies()
endif()ament_package()
package.xml变更
默认的报名直接使用3D模型的名称,这里主要是更改下包名称和版本,以及一些过时的依赖信息。sw导出的package.xml
<package format="2"><name>QY2023-00019</name><version>1.0.0</version><description><p>URDF Description package for QY2023-00019</p><p>This package contains configuration data, 3D models and launch files
for QY2023-00019 robot</p></description><author>TODO</author><maintainer email="TODO@email.com" /><license>BSD</license><buildtool_depend>catkin</buildtool_depend><depend>roslaunch</depend><depend>robot_state_publisher</depend><depend>rviz</depend><depend>joint_state_publisher_gui</depend><depend>gazebo</depend><export><architecture_independent /></export>
</package>
更改之后的,需要主要的是exec_depend项使用了urdf_launch。需要先下载编译安装运行这个包,链接地址
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3"><name>urdf_robot</name><version>1.1.0</version><description>This package contains a number of URDF robot.</description><maintainer email="davidvlu@gmail.com">qhf</maintainer><license>BSD 3-clause</license><url>http://ros.org/wiki/urdf_tutorial</url><author email="davidvlu@gmail.com">David V. Lu!!</author><buildtool_depend>ament_cmake</buildtool_depend><exec_depend>urdf_launch</exec_depend><test_depend>ament_lint_auto</test_depend><export><build_type>ament_cmake</build_type><gazebo_ros gazebo_model_path="${prefix}/.."/></export>
</package>
这两项完成之后应当就能顺利使用colcon build编译,编译完成后记得source install里面的setup.bash的路径。最后可以使用ros2 pkg list 来检查下是否已经顺利将包安装到环境中。
Launch更改
使用sw_urdf_exporter插件导出的只有*.launch文件,所以需要自己写一个python的启动文件。我这里就直接参考了官方的urdf_tutorial的包,源码地址。记得切换下ROS2分支。以下是参考的display.launch.py文件,需要更改的部分已经用中文注释。新建这样的py文件放到导出的urdf文件夹中即可
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument, IncludeLaunchDescription
from launch.substitutions import LaunchConfiguration, PathJoinSubstitution
from launch_ros.substitutions import FindPackageShare
def generate_launch_description():ld = LaunchDescription()urdf_robot_path = FindPackageShare('urdf_robot') #urdf_robot更改为自己的包名default_model_path = PathJoinSubstitution(['urdf', 'QY2023-00019.urdf']) #QY2023-00019.urdf更改为自己的urdf文件default_rviz_config_path = PathJoinSubstitution([urdf_robot_path, 'rviz', 'urdf.rviz'])# These parameters are maintained for backwards compatibilitygui_arg = DeclareLaunchArgument(name='gui', default_value='true', choices=['true', 'false'],description='Flag to enable joint_state_publisher_gui')ld.add_action(gui_arg)rviz_arg = DeclareLaunchArgument(name='rvizconfig', default_value=default_rviz_config_path,description='Absolute path to rviz config file')ld.add_action(rviz_arg)# This parameter has changed its meaning slightly from previous versionsld.add_action(DeclareLaunchArgument(name='model', default_value=default_model_path,description='Path to robot urdf file relative to urdf_robot package'))ld.add_action(IncludeLaunchDescription(PathJoinSubstitution([FindPackageShare('urdf_launch'), 'launch', 'display.launch.py']),launch_arguments={'urdf_package': 'urdf_robot','urdf_package_path': LaunchConfiguration('model'),'rviz_config': LaunchConfiguration('rvizconfig'),'jsp_gui': LaunchConfiguration('gui')}.items()))return ld
运行
编译后,使用一下命令行即可运行
ros2 launch urdf_robot display.launch.py
其中urdf_robot为自己命名的包名,display.launch.py为上述所说的启动文件名。
运行之后还会报一个错误,此错误是由于.urdf文件路径描述ROS1中语法在ROS2中不能识别的原因,所以还需要做将.urdf中关于模型文件的路径更改。
更改前:
<geometry><meshfilename="package://QY2023-00019/meshes/base_link.STL" /></geometry>
更改后:
<geometry><meshfilename="file://$(find urdf_robot)/meshes/base_link.STL" /></geometry>
所有的路径都做这样的修改。然后重新编译运行即可。
相关文章:

SolidWorks机器转ROS2 URDF
文章目录 开发环境SolidWords插件使用生成urdf文件之后的处理CMakeLists文件修改package.xml变更Launch更改运行 开发环境 Linux系统:Ubuntu 22.04 Ros2版本:humble Solidwords版本:2023 (2019以上版本应该都是可以的)…...

(Linux驱动学习 - 6).Linux中断
一. Linux 中断 API 函数 1.中断号 每个中断都有一个中断号,通过中断号即可区分不同的中断,有的资料也把中断号叫做中 断线。在 Linux 内核中使用一个 int 变量表示中断号。 2.申请中断 - request_irq 函数原型: int request_irq(unsigne…...

SpringBoot驱动的明星周边产品电商解决方案
1系统概述 1.1 研究背景 如今互联网高速发展,网络遍布全球,通过互联网发布的消息能快而方便的传播到世界每个角落,并且互联网上能传播的信息也很广,比如文字、图片、声音、视频等。从而,这种种好处使得互联网成了信息传…...

C++、Ruby和JavaScript
C C最初被称为带类的C, 兼容C的语法,此既是C得以流行的前提,也是C某些语法被捆绑的根源。C的来源于C语言的递增运算符,代表增加,意义为扩展。 C的历史 C类的设计思想来源于Simula. Simula为模拟的意思,被称为最早的面向…...

32单片机 低功耗模式
以下是一个基于STM32的低功耗模式示例代码,展示如何将STM32微控制器置于低功耗模式,并在特定条件下唤醒它。这个示例使用的是STM32 HAL库。 ### 示例代码:进入睡眠模式并使用外部中断唤醒 c #include "stm32f4xx_hal.h" // 函数声明…...

501、二叉搜索树中的众数
1、题目描述 . - 力扣(LeetCode) 要求:给一个包含重复值的BST,找出并返回BST中的众数(出现频次最高的元素)。 注:如果树中有不止一个众数可以按任意顺序返回,即如果有多个众数多个都要返回。 ps࿱…...

【洛谷】P2330 [SCOI2005] 繁忙的都市 的题解
【洛谷】P2330 [SCOI2005] 繁忙的都市 的题解 题目传送门 题解 水最小生成树,发现可以水一堆黄题qaq 这题显然就是求最大边权最小的生成树,而用 Kruskal 很容易证明这就是最小生成树,考虑一下这个算法每次取的都是不构成环的最小边即可&a…...
)
第18场小白入门赛(蓝桥杯)
第 18 场 小白入门赛 6 武功秘籍 考察进制理解。 对于第 i i i 位,设 b i t i x bit_ix bitix ,每一位的最大值是 b j b_j bj ,也就是说每一位是 b j 1 b_j1 bj1 进制 ,那么第 i i i 位的大小就是 x ∑ j i 1…...
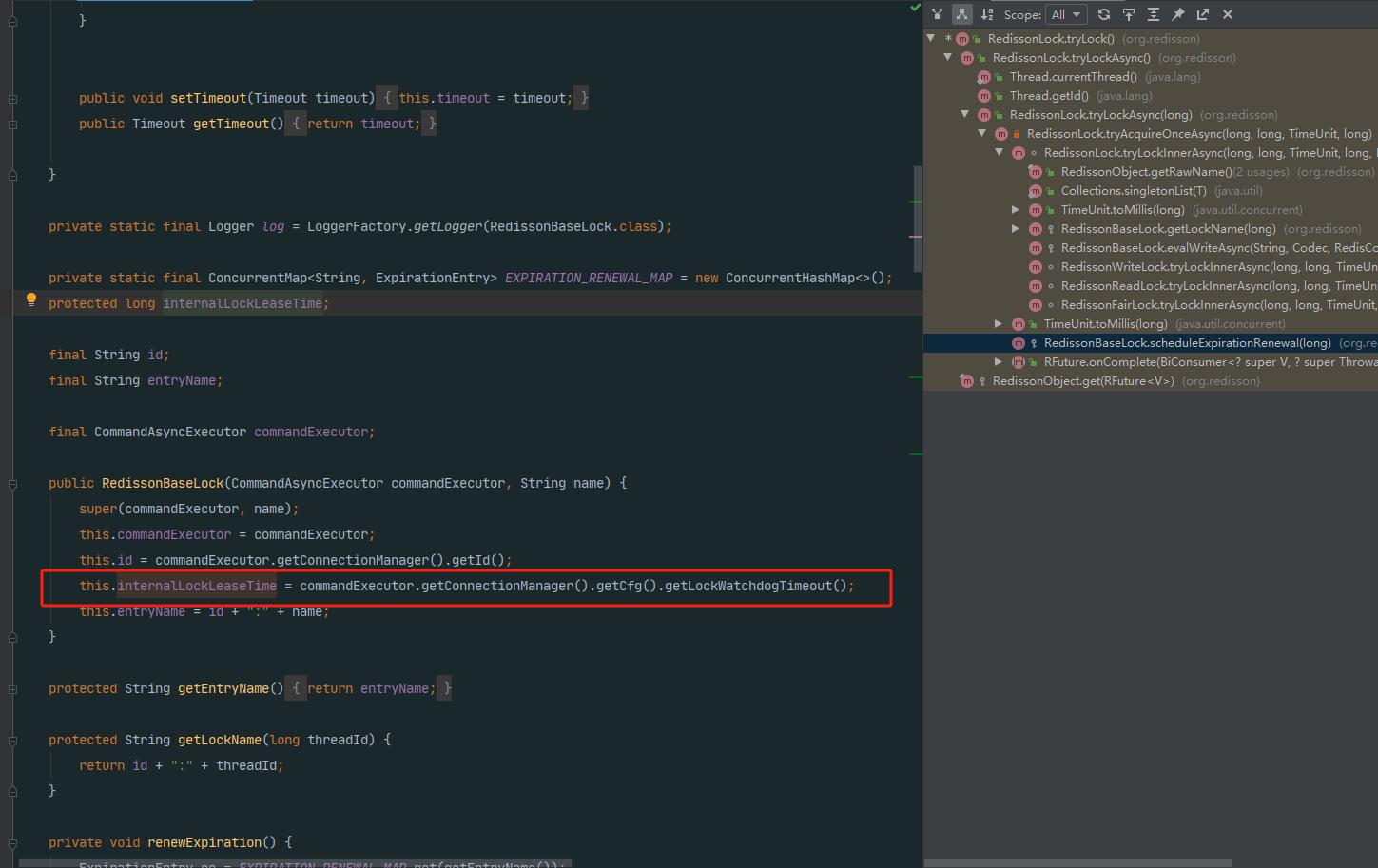
Redission · 可重入锁(Reentrant Lock)
前言 Redisson是一个强大的分布式Java对象和服务库,专为简化在分布式环境中的Java开发而设计。通过Redisson,开发人员可以轻松地在分布式系统中共享数据、实现分布式锁、创建分布式对象,并处理各种分布式场景的挑战。 Redisson的设计灵感来…...

初阶C语言-指针
1.指针是什么? 理解指针的两个要点: 1.指针是内存中一个最小单元的编号,也就是地址 2.口头语中说的指针,通常是指指针变量,是用来存放内存地址的变量 总结:指针就是地址,口语中说的指针通常是指…...

论文笔记:微表情欺骗检测
整理了AAAI2018 Deception Detection in Videos 论文的阅读笔记 背景模型实验可视化 背景 欺骗在我们的日常生活中很常见。一些谎言是无害的,而另一些谎言可能会产生严重的后果。例如,在法庭上撒谎可能会影响司法公正,让有罪的被告逍遥法外。…...

智能家居有哪些产品?生活中常见的人工智能有哪些?
智能家居有哪些产品? 1、智能照明设备类:智能开关、智能插座、灯控模块、智能空开、智能灯、无线开关。 2、家庭安防类:智能门锁、智能摄像机、智能猫眼、智能门铃。 3、智能传感器类:烟雾传感器、可燃气体传感器、水浸传感器、声光报警器…...

洗车行软件系统有哪些 佳易王洗车店会员管理系统操作教程#洗车店会员软件试用版下载
一、前言 【试用版软件下载可点击本文章最下方官网卡片】 洗车行软件系统有哪些 佳易王洗车店会员管理系统操作教程#洗车店会员软件试用版下载 洗车管理软件应用是洗车业务的得力助手,实现会员管理及数据统计一体化,助力店铺高效、有序运营。 洗车项…...

【Java】springboot 项目中出现中文乱码
在刚创建的springboot项目中,出现乱码,跟走着解决一下 1、Ctrl Shift S 打开idea设置,根据图片来,将③④这三个地方都修改为UTF-8 2、返回配置查看,解决...

开放式耳机是什么意思?漏音吗?开放式的运动蓝牙耳机推荐
目前运动耳机市场主要分为入耳式、骨传导和开放式三类。入耳式耳机占比30%-40%,虽目前占比较大,但因在运动场景下有闷塞感、出汗不适、屏蔽外界环境音带来安全隐患等缺点,占比会逐渐下降。 骨传导耳机占比也为30%-40%,其不堵塞耳…...

如何优雅的处理NPE问题?
1.什么是NPE? NPE,即NullPointerException,是开发中最常见的问题之一,有必要知道如何正确地处理NPE。 对于 Java 开发者来说,null 是一个令人头疼的类型,一不小心就会发生 NPE (空指针…...

k8s 中存储之 NFS 卷
目录 1 NFS 卷的介绍 2 NFS 卷的实践操作 2.1 部署一台 NFS 共享主机 2.2 在所有k8s节点中安装nfs-utils 2.3 部署nfs卷 2.3.1 生成 pod 清单文件 2.3.2 修改 pod 清单文件增加 实现 NFS卷 挂载的 参数 2.3.3 声明签单文件并查看是否创建成功 2.3.4 在 NFS 服务器 创建默认发布…...

Redis中BitMap实现签到与统计连续签到功能
服务层代码 //签到Overridepublic Result sign() {//1.获取当前登录的用户Long userId UserHolder.getUser().getId();//获取日期LocalDateTime now LocalDateTime.now();//拼接keyString keySuffix now.format(DateTimeFormatter.ofPattern(":yyyyMM"));String …...
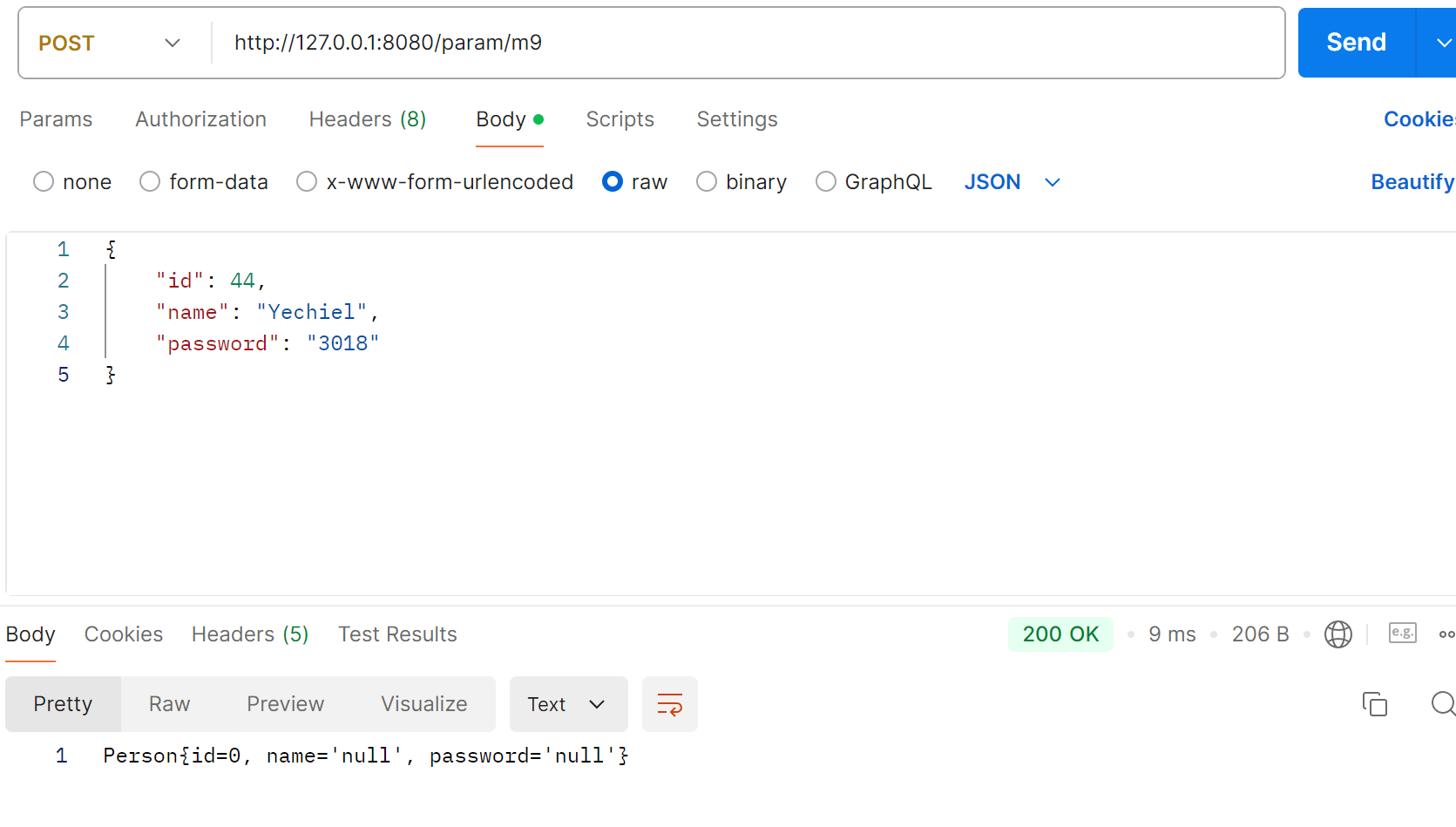
【Spring】“请求“ 之传递 JSON 数据
文章目录 JSON 概念JSON 语法JSON 的语法JSON 的两种结构 JSON 字符串和 Java 对象互转JSON 优点传递 JSON 对象 JSON 概念 JSON:JavaScript Object Notation【JavaScript 对象表示法】 JSON 就是一种数据格式,有自己的格式和语法,使用文本…...

文心一言 VS 讯飞星火 VS chatgpt (359)-- 算法导论24.3 1题
一、在图 24-2上运行Dijkstra算法,第一次使用结点 s s s作为源结点,第二次使用结点 z z z作为源结点。以类似于图 24-6 的风格,给出每次while循环后的 d d d值和 π π π值,以及集合 S S S中的所有结点。如果要写代码,…...

从10G到40G/50G:UltraScale+以太网IP核升级实战与GT资源规划
1. 从10G到40G/50G的升级挑战 当你第一次把项目从10G升级到40G/50G以太网时,最直观的感受就是"资源突然不够用了"。我去年接手一个视频处理项目时就深有体会——原本在10G环境下游刃有余的FPGA设计,切换到40G后GT资源立刻捉襟见肘。这里说的GT…...

FastbootEnhance:一款强大的Windows平台Fastboot工具箱与Payload提取器
FastbootEnhance:一款强大的Windows平台Fastboot工具箱与Payload提取器 【免费下载链接】FastbootEnhance A user-friendly Fastboot ToolBox & Payload Dumper for Windows 项目地址: https://gitcode.com/gh_mirrors/fa/FastbootEnhance 你是否曾经为A…...

Git提交规范与自动化实践:从Conventional Commits到团队协作
1. 项目概述与核心价值最近在整理团队代码仓库时,发现一个挺普遍的问题:提交记录五花八门,什么“fix bug”、“update”、“test”之类的信息满天飞。这种混乱的提交历史,不仅让后续的代码审查和问题追溯变得异常困难,…...

知识图谱冷启动失败率高达68%?NotebookLM构建中的3类隐性数据断层及实时修复方案
更多请点击: https://intelliparadigm.com 第一章:NotebookLM知识图谱构建的冷启动困境本质 NotebookLM 作为 Google 推出的基于文档理解的 AI 助手,其核心能力依赖于对用户上传文档构建结构化知识图谱。然而在初始阶段,系统面临…...

如何自动化监控线上问题
要实现线上问题的自动化监控,不能仅停留在工具的堆砌,而需要从体系规划、数据采集、智能告警、动态诊断到流程规范进行全盘设计。以下是基于行业最佳实践的自动化监控构建指南:一、 体系规划与监控点梳理构建自动化监控的第一步是明确“监控什…...

Linux驱动调试利器:debugfs接口设计与实现详解
1. 项目概述:为什么我们需要debugfs?在Linux内核驱动的开发与调试过程中,我们常常面临一个核心痛点:如何在不重启系统、不重新编译驱动、甚至不借助复杂外部工具的情况下,实时地窥探驱动内部的状态、修改关键参数&…...

新手避坑指南:用ROS Melodic在Ubuntu 18.04上为Dofbot机械臂配置MoveIt!
新手避坑指南:用ROS Melodic在Ubuntu 18.04上为Dofbot机械臂配置MoveIt! 第一次为Dofbot机械臂配置ROS Melodic和MoveIt时,很多新手会在环境搭建、依赖安装和配置文件调试等环节遇到各种"坑"。这些看似简单的问题往往耗费大量时间…...

窗口尺寸自由掌控:SRWE如何让任意程序窗口随心所欲
窗口尺寸自由掌控:SRWE如何让任意程序窗口随心所欲 【免费下载链接】SRWE Simple Runtime Window Editor 项目地址: https://gitcode.com/gh_mirrors/sr/SRWE 你是否曾为某个应用程序的固定窗口尺寸感到束手无策?想在高分辨率下截图却受限于游戏设…...

Solana Meme币合约开发:Pump.fun开源实现与绑定曲线机制解析
1. 项目概述与核心价值最近在Solana生态里,Pump.fun这个平台可以说是火得一塌糊涂。作为一个允许任何人快速创建和启动Meme币的“发射台”,它极大地降低了在Solana上发币的门槛,也催生了一波又一波的造富神话。如果你关注过这个领域ÿ…...

从零构建私有数字保险库:硬件选型、加密策略与实战部署
1. 项目概述:从“0”开始的数字资产保险库在数字资产日益成为个人与企业核心财富的今天,如何安全、自主地保管这些资产,成为了一个绕不开的难题。无论是加密货币的私钥、重要的数字凭证、敏感的商业文档,还是家庭成员的密码本&…...