Renesas R7FA8D1BH (Cortex®-M85) 上超声波测距模块(HC-SR04)驱动开发
目录
概述
1 软硬件
1.1 软硬件环境信息
1.2 开发板信息
1.3 调试器信息
2 硬件架构
2.1 硬件框架结构
2.2 测距模块(HC-SR04)介绍
2.2.1 HC-SR04特性
2.2.2 HC-SR04操作时序
2.2.3 计算距离
3 软件实现
3.1 FSP配置项目
3.1.1 配置IO口的外部中断
3.1.2 配置定时器
3.2 代码架构
3.3 驱动实现
4 测试
4.1 编译代码
4.2 验证
源代码下载地址:
https://www.firebbs.cn/forum.php?mod=viewthread&tid=37943
概述
本文主要介绍Renesas R7FA8D1BH (Cortex®-M85) 上超声波测距模块(HC-SR04)驱动开发的过程,笔者介绍了HC-SR04测距模块驱动的实现原理,并使用FSP配置外围驱动接口,并编写驱动代码,实现测距的功能。在Renesas R7FA8D1BH板卡上通过改变距离参数验证驱动程序的功能。
1 软硬件
1.1 软硬件环境信息
| 软硬件信息 | 版本信息 |
|---|---|
| Renesas MCU | R7FA8D1BH |
| Keil | MDK ARM 5.38 |
| FSP 版本 | 5.3.0 |
| 调试工具:N32G45XVL-STB | DAP-LINK |
1.2 开发板信息
笔者选择使用野火耀阳开发板_瑞萨RA8,该板块的主控MCU为R7FA8D1BHECBD,7FA8D1BHECBD的内核为ARM Contex-M85。

1.3 调试器信息
对于R7FA8D1BHECBD芯片,其使用的内核为Cortex®-M85 Core, ST-LINK-V2或者J-LINK-V9不支持下载和调试功能。笔者经过多次尝试,发现N32G45XVL-STB板卡上自带的DAP-LINK可以下载和调试R7FA8D1BHECBD。
下图为N32G45XVL-STB开发板实物图:

2 硬件架构
2.1 硬件框架结构
IO接口配置功能:
触发信号接口P7_10: 送触发信号(10us)的脉冲
测距数据响应接口P7_09: 该IO配置外部中断响应模式,用于接收HC-SR04发回的脉冲信号
TIMER-0: 配置为10us响应速度,用于计算数据的脉冲宽度
系统工作框架结构如下:

2.2 测距模块(HC-SR04)介绍

2.2.1 HC-SR04特性

2.2.2 HC-SR04操作时序
工作原理:
Step -1: TRIG IO 收到10us 高电平
step - 2: SR04自动发送8个40hz方波,并检测是否有信号返回
step - 3:SR04检测到返回信号,ECHO IO发送高电平,高电平持续时间为SR04发送波信号到返回波信号的时间。
具体工作波形图如下:

2.2.3 计算距离
以厘米为单位计算公式:
距离 = us/58(单位: cm), us为ECHO IO接收的高电平的持续时间,时间单位为: 微妙
以英寸为单位计算公式:
距离 = us/148(单位: 英寸), us为ECHO IO接收的高电平的持续时间,时间单位为: 微妙
3 软件实现
3.1 FSP配置项目
3.1.1 配置IO口的外部中断
1) 创建外部中断stack

2)配置参数
需要配置的参数如下:
1)选择通道号
2)回调函数
3)IO接口

3.1.2 配置定时器
1)创建定时器的stack

2)配置参数
需要配置的参数如下:
1)通道号
2)周期
3) 最小周期单元
4)中断回调函数

3.2 代码架构
完成以上参数配置后,就可以使用FSP生成工程代码,其代码架构如下:

3.3 驱动实现
1)初始化函数
函数static void timer5_Init(void):实现定时器的驱动初始化功能
代码32行:打开定时器
代码36行:启动定时器
代码39行:启动计数功能
函数:void HC_SR04_Init ( void ):实现HC_SR04模块初始化功能,该函数可以被外部其他函数调用
代码48行: 代码IO外部中断aima
代码52行:打开外部中断
代码55行:调用定时器初始化函数,启动定时器,以实现计算脉冲宽度功能

2)触发函数和定时器回调函数

3)外部中断回调函数
代码90行:启动定时器,开始计数
代码94行:停止定时器
代码95行:计算距离数据

源代码文件如下:
/*FILE NAME : sht2x.cDescription: user sht20 interface Author : tangmingfei2013@126.comDate : 2024/06/03*/
#include "hal_data.h"
#include "hc_sr04.h"#define timeDelayUS(us) R_BSP_SoftwareDelay(us, BSP_DELAY_UNITS_MICROSECONDS);#define ICU_IRQN_PIN BSP_IO_PORT_07_PIN_09
#define ICU_IRQN 10#define TRIG BSP_IO_PORT_07_PIN_10#define TRIG_H R_IOPORT_PinWrite(&g_ioport_ctrl, TRIG, BSP_IO_LEVEL_HIGH)
#define TRIG_L R_IOPORT_PinWrite(&g_ioport_ctrl, TRIG, BSP_IO_LEVEL_LOW)static bool bl_trigger = false;
static uint32_t tick_cnt_1us;
static int state =0;static float distance;static void timer5_Init(void)
{fsp_err_t err = FSP_SUCCESS;/* Initializes the module. */err = R_AGT_Open(&g_timer5_ctrl, &g_timer5_cfg);/* Handle any errors. This function should be defined by the user. */assert(FSP_SUCCESS == err);/* Start the timer. */err = R_AGT_Start(&g_timer5_ctrl);assert(FSP_SUCCESS == err);err = R_AGT_Enable(&g_timer5_ctrl);assert(FSP_SUCCESS == err);
}void HC_SR04_Init ( void )
{/* Configure the external interrupt. */fsp_err_t err = R_ICU_ExternalIrqOpen(&g_external_irq10_ctrl, &g_external_irq10_cfg);assert(FSP_SUCCESS == err);/* Enable the external interrupt. *//* Enable not required when used with ELC or DMAC. */err = R_ICU_ExternalIrqEnable(&g_external_irq10_ctrl);assert(FSP_SUCCESS == err);timer5_Init();
}void HC_SR04_Trigger( void )
{bl_trigger = true;TRIG_H;timeDelayUS(10);TRIG_L;state = 0;
}void g_timer5_Callback (timer_callback_args_t * p_args)
{if (TIMER_EVENT_CYCLE_END == p_args->event){tick_cnt_1us++;}
}/* Called from icu_irq_isr */
void external_irq10_callback (external_irq_callback_args_t * p_args)
{fsp_err_t err = FSP_SUCCESS;(void) p_args;switch( state ){default:case 0:tick_cnt_1us = 0;state = 1;err = R_AGT_Enable(&g_timer5_ctrl);assert(FSP_SUCCESS == err);break;case 1:err = R_AGT_Disable(&g_timer5_ctrl);distance = (float)(tick_cnt_1us/5.8);state = 0;tick_cnt_1us = 0;assert(FSP_SUCCESS == err);break;}
}void debug_SR04_LOG( void )
{user_get_rtc();
}float HC_SR04_getDistance( void )
{return distance;
}/* End of this file */
4 测试
4.1 编译代码
系统硬件平台如下:

编译代码下载到板卡中运行:

4.2 验证

改变距离后,在OLED得到当前的距离数据:

相关文章:
Renesas R7FA8D1BH (Cortex®-M85) 上超声波测距模块(HC-SR04)驱动开发
目录 概述 1 软硬件 1.1 软硬件环境信息 1.2 开发板信息 1.3 调试器信息 2 硬件架构 2.1 硬件框架结构 2.2 测距模块(HC-SR04)介绍 2.2.1 HC-SR04特性 2.2.2 HC-SR04操作时序 2.2.3 计算距离 3 软件实现 3.1 FSP配置项目 3.1.1 配置IO口的外…...

短视频矩阵系统独立源码/源头开发
短视频矩阵系统独立源码/源头开发 #抖音矩阵系统源码开发 #短视频矩阵系统源码开发 #短视频seo源码开发 一、 抖音短视频seo矩阵系统源码开发,需要掌握以下技术: 网络编程:能够使用Python、Java或其他编程语言进行网络编程,比如…...

k8s部署jenkins集群,配置集群kubernetes plugin的pod模板
一、配置集群 填写k8s地址:https://kubernetes.default.svc.cluster.local 命名空间:kubernetes-plugin Jenkins地址:http://jenkins:18080 Jenkins通道:jenkins:50000 jenkins是容器别名 设置jenkinsslave的标签属性 二、…...

微软确认Word离奇Bug 命名不当会导致文件被删
微软近日确认Word应用中存在一个Bug,该漏洞可能导致用户在特定情况下错误地删除文件。该问题主要出现在文件命名过程中,如果用户在保存Word文件时采用特定的命名方式,文件可能会被移动到回收站。 根据微软支持中心的消息,如果用户…...

Vue包的安装使用
文章目录 vue介绍一、灵活易用1.渐进式框架2.简洁的语法 二、高效的响应式系统1.数据驱动2.响应式原理 三、强大的组件化开发1.组件化思想2.组件通信 四、丰富的生态系统1.插件和库2.社区支持 安装依赖删除新增文件夹components设置(1)home.vue(2)data.vue(3)zero.vue router配…...

大模型1-本地部署实现交互问答
任务 在本地部署大模型,调用大模型进行对话。 添加库: 1、Transformer Transformers 是由 Hugging Face 开发的一个开源库,广泛应用于自然语言处理(NLP)任务。其主要功能是简化了对大型预训练语言模型的加载和使用…...

鸿蒙架构-系统架构师(七十八)
1信息加密是保证系统机密性的常用手段。使用哈希校验是保证数据完整性的常用方法。可用性保证合法用户对资源的正常访问,不会被不正当的拒绝。()就是破坏系统的可用性。 A 跨站脚本攻击XSS B 拒绝服务攻击DoS C 跨站请求伪造攻击CSRF D 缓…...
大数据存储计算平台EasyMR:多集群统一管理助力企业高效运维
随着全球企业进入数字化转型的快车道,数据已成为企业运营、决策和增长的核心驱动力。为了处理海量数据,同时应对数据处理的复杂性和确保系统的高可用性,企业往往选择部署多个Hadoop集群,这样的策略可以将生产环境、测试环境和灾备…...

代理IP的类型及其在爬虫中的应用
1 动态住宅代理 这些IP地址来自真实的住宅用户,因此具有很高的匿名性和隐私性,不易被别为代理IP。而增加了爬虫任务的安全性。这类代理有以下特点: 高安全性:使用这类代理可发起真实有效的请求,提高爬虫效率的同时&am…...
)
鸿蒙Swiper动态加载翻页数据(等同于安卓动态加载viewPager)
我这里是加载一个实体类列表 类似 List 的数据,那么首先写一个dataSource: export class MyDataSource implements IDataSource {private list: MyBean[] []constructor(list: MyBean[]) {this.list list}totalCount(): number {return this.list.len…...

嵌入式面试——FreeRTOS篇(八) Tickless低功耗
本篇为:FreeRTOS Tickless 低功耗模式篇 一、低功耗模式简介 1、低功耗介绍 答: 很多应用场合对于功耗的要求很严格,比如可穿戴低功耗产品、物联网低功耗产品等;一般MCU都有相应的低功耗模式,裸机开发时可以使用MCU的…...

基于facefusion的换脸
FaceFusion是一个引人注目的开源项目,它专注于利用深度学习技术实现视频或图片中的面部替换。作为下一代换脸器和增强器,FaceFusion在人脸识别和合成技术方面取得了革命性的突破,为用户提供了前所未有的视觉体验。 安装 安装基础软件 安装…...
)
Hive数仓操作(十三)
一、JSON 数据 JSON(JavaScript Object Notation)是一种轻量级的数据交换格式,在不同的编程语言之间进行数据传输时非常通用和常用。JSON 格式简单直观,易于阅读和编写,并且可以被大多数编程语言轻松解析和生成。 1.…...

MyBatis XML映射文件
XML映射文件 XML映射文件的名称与Mapper接口名称一致,并且将XML映射文件和Mapper接口放置在相同包下(同包同名)XML映射文件的namespace属性为Mapper接口全限定名一致XML映射文件中SQL语句的id与Mapper接口中的方法名一致,并保持返…...

「PYTHON」配置支持cuda计算的torch环境
本教程用于配置可支持cuda加速计算的torch环境 如果单纯使用命令行的pip安装torch,几乎都是cpu版本的,所以想要下载支持cuda的torch,我们只能通过手动下载安装包到本地,再使用pip从下载好的本地文件离线安装 而要想使用cuda加速…...
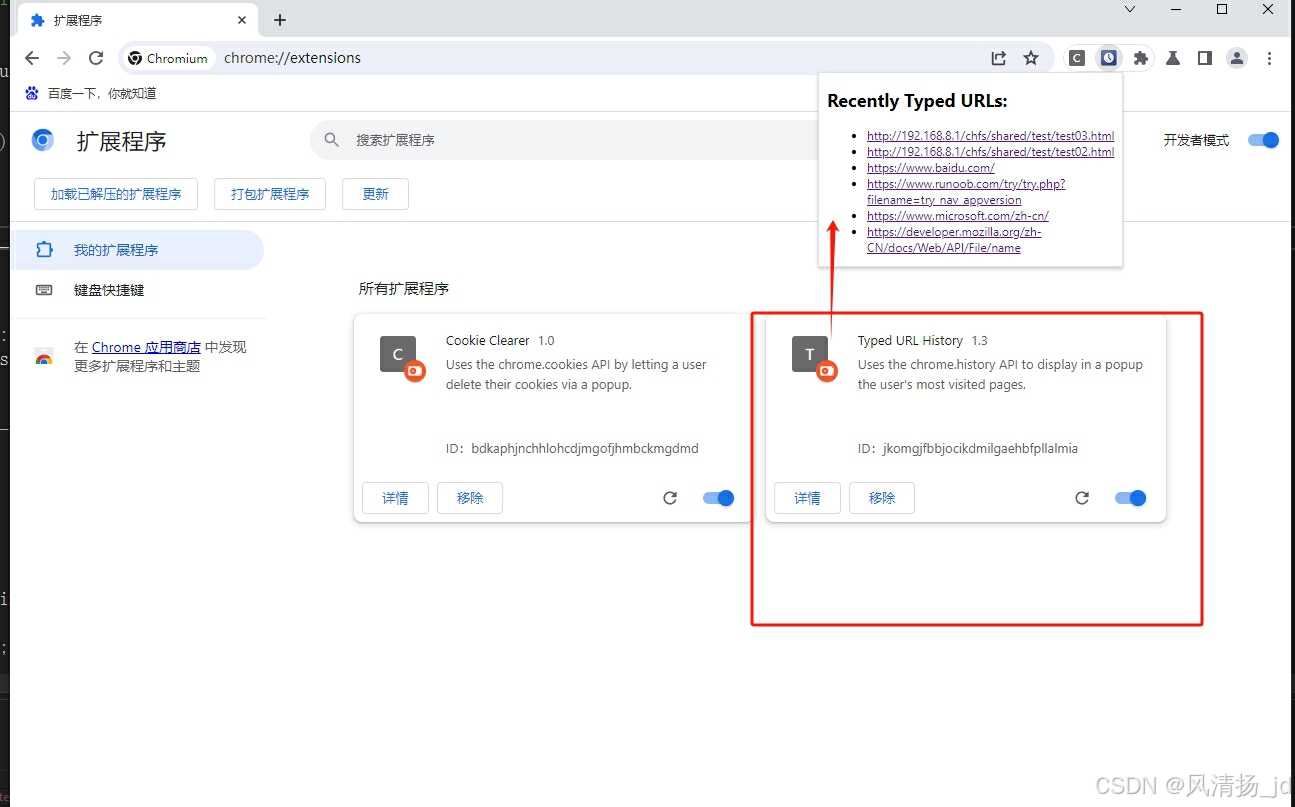
Chromium 中chrome.history扩展接口c++实现
一、前端 chrome.history定义 使用 chrome.history API 与浏览器的已访问网页的记录进行交互。您可以在浏览器的历史记录中添加、移除和查询网址。如需使用您自己的版本替换历史记录页面,请参阅覆盖网页。 更多参考:chrome.history | API | Chrome…...
(Linux和数据库)1.Linux操作系统和常用命令
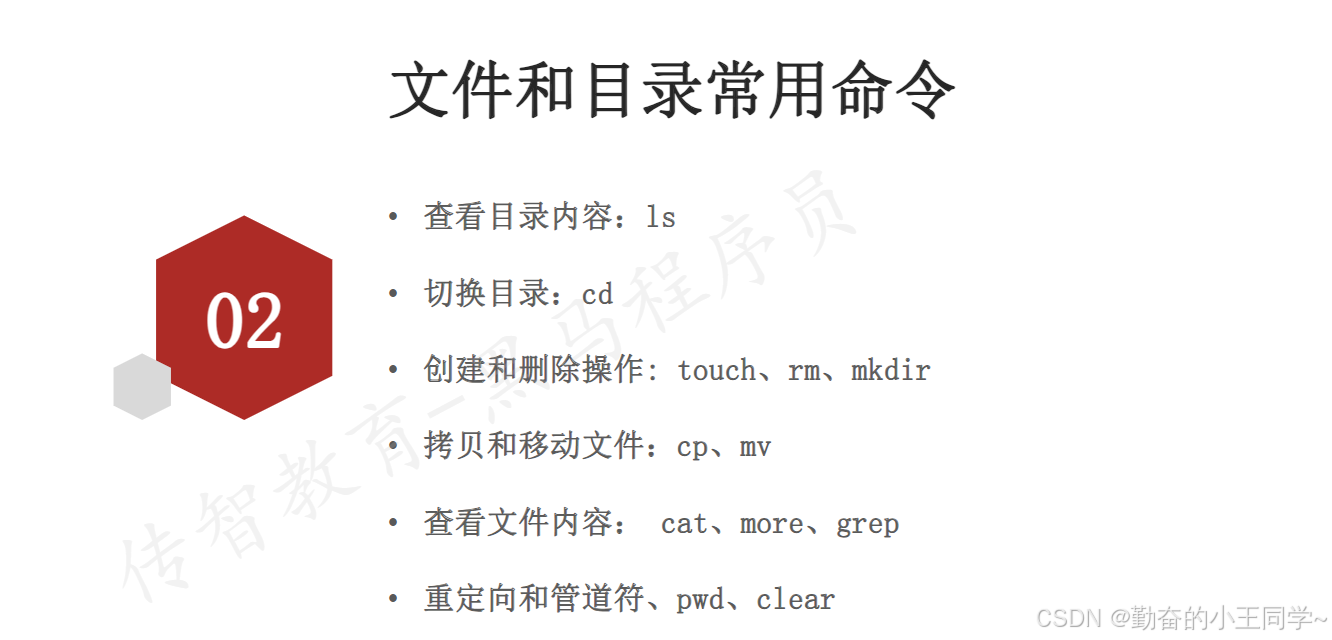
了解Linux操作系统介绍 除了办公和玩游戏之外不用Linux,其他地方都要使用Linux(it相关) iOS的本质是unix(unix是付费版本的操作系统) unix和Linux之间很相似 Linux文件系统和目录 bin目录--放工具使用的 操作Linux远程…...
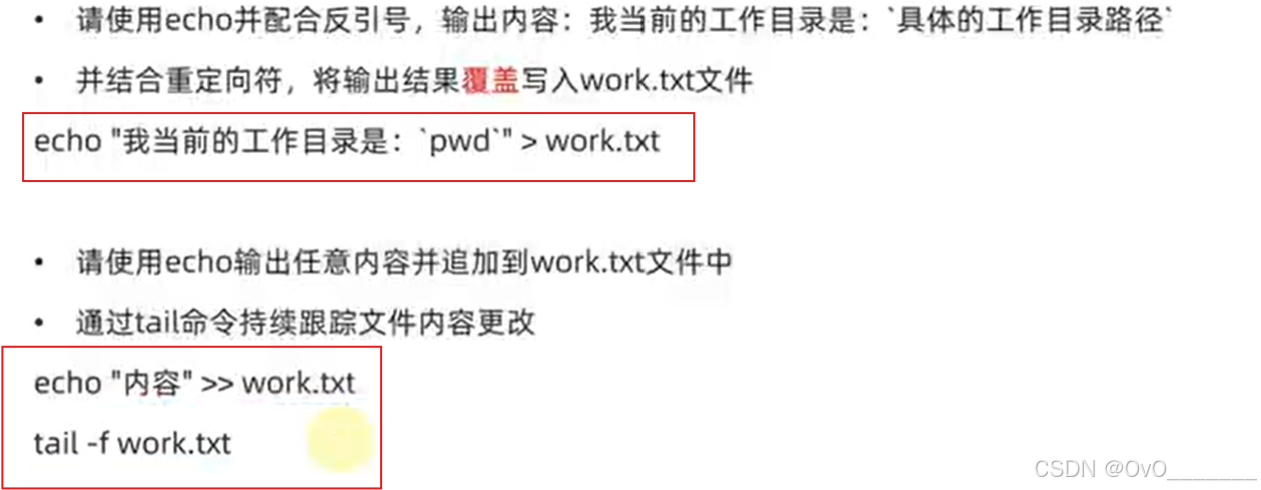
Linux——echo-tail-重定向符
echo命令 类似printf 输出 反引号 重定向符 > 和 >> > 覆盖 >> 追加 tail命令 查看文件尾部内容,追踪文件最新更改 tail -num 从尾部往上读num行,默认10行 tail -f 持续跟踪...
--配置)
GitHub Copilot 使用手册(一)--配置
一、 什么是GitHub Copilot GitHub Copilot 是GitHub和OpenAI合作开发的一个人工智能工具,在使用Visual Studio Code、Microsoft Visual Studio、Vim、Cursor或JetBrains等IDE时可以协助用户编写代码等工作,实现虚拟的结对编程。 二、 GitHub Copilot …...
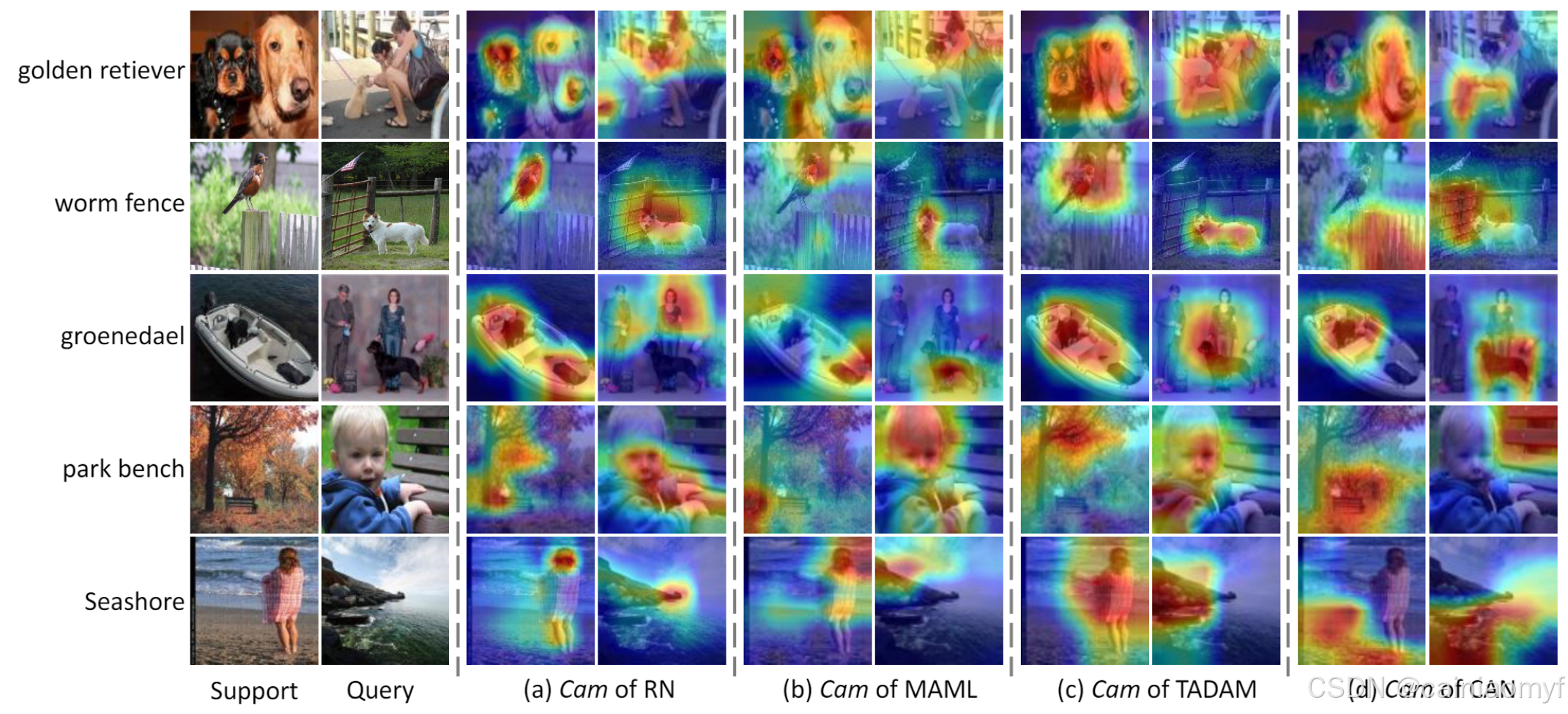
【论文阅读】Cross Attention Network for Few-shot Classification
用于小样本分类的交叉注意力网络 引用:Hou, Ruibing, et al. “Cross attention network for few-shot classification.” Advances in neural information processing systems 32 (2019). 论文地址:下载地址 论文代码:https://github.com/bl…...

从零到一:在个人PC上部署并集成ChatGLM-6B到Unity应用
1. 环境准备与模型下载 在个人PC上部署ChatGLM-6B需要先搞定三件事:硬件检查、软件环境搭建和模型文件获取。我的老款游戏本(i7-9750H RTX2060 6GB显存)实测可以流畅运行,关键在于正确的量化配置。 硬件检查要点: 显存…...

GD32F103C8T6烧录方式全解析:串口ISP、ST-Link Utility、Keil在线,哪种最适合你?
GD32F103C8T6烧录方案深度评测:从原型开发到量产部署的全场景指南 在嵌入式开发领域,选择正确的程序烧录方式往往决定着开发效率和生产成本。作为STM32F103的国产替代方案,GD32F103C8T6凭借其出色的性价比赢得了广泛关注。但许多开发者在迁移…...

LLM Notebooks:从零构建RAG问答系统的实践指南
1. 项目概述:一个面向大语言模型实践的“笔记本”仓库最近在GitHub上闲逛,发现了一个挺有意思的仓库,叫qianniuspace/llm_notebooks。光看名字,llm_notebooks,大语言模型笔记本,这指向性就非常明确了。这大…...

Boss直聘职位数据自动化采集:Python爬虫架构设计与工程实践
1. 项目概述与核心价值最近在技术社区里,看到不少朋友在讨论一个叫longsizhuo/BossZhiPin_Job_Search的项目。光看名字,你大概就能猜到,这是一个跟“Boss直聘”和“职位搜索”相关的自动化工具。作为一个在招聘数据分析和自动化领域摸爬滚打了…...

3个高效方法:免费获取百度网盘高速下载直链的完整指南
3个高效方法:免费获取百度网盘高速下载直链的完整指南 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 当我们面对百度网盘缓慢的下载速度时,常常感到无…...

dotai:将AI大模型无缝集成到Shell终端的智能助手工具
1. 项目概述:当AI遇上你的终端如果你是一个重度命令行用户,每天在终端里敲击着ls、cd、git commit这些命令,有没有那么一瞬间,希望有个助手能帮你自动补全、解释命令,甚至直接帮你写出复杂的管道操作?dotai…...

OpenAgentsControl:构建多智能体协同系统的开源框架解析
1. 项目概述:一个面向智能体控制的开放框架最近在折腾AI智能体(Agent)相关的项目,发现一个挺有意思的开源仓库:darrenhinde/OpenAgentsControl。这个项目名字直译过来就是“开放智能体控制”,听起来就很有搞…...

基于RP2040与CircuitPython的键盘内嵌DOOM游戏启动器DIY指南
1. 项目概述与核心思路几年前,我还在用笨重的全尺寸键盘时,就总琢磨着怎么给这每天摸上八小时的家伙加点“私货”。直到后来玩起了RP2040和CircuitPython,一个念头就冒出来了:能不能把游戏直接“焊”进键盘里?不是那种…...

Go语言实现Hermes引擎:高性能JavaScript字节码虚拟机解析与实践
1. 项目概述:一个Go语言实现的Hermes引擎最近在折腾一些需要高性能模板渲染的后端服务,偶然间在GitHub上发现了LAI-755/hermes-go这个项目。简单来说,这是一个用纯Go语言实现的Hermes引擎。如果你对前端生态熟悉,可能听说过Hermes…...
)
别再手动调色了!用Matlab bar3函数一键生成论文级渐变三维柱状图(附完整代码)
别再手动调色了!用Matlab bar3函数一键生成论文级渐变三维柱状图(附完整代码) 科研图表的美观程度直接影响论文的第一印象,而三维柱状图在展示多维度数据时尤为常见。传统手动调整每个柱体的颜色、透明度、光照效果不仅耗时&#…...