基于极光优化算法(Polar Lights Optimization, PLO)的多无人机协同三维路径规划(提供MATLAB代码)
一、极光优化算法介绍
极光优化算法(Polar Lights Optimization, PLO)是2024年提出的一种新型的元启发式优化算法,它从极光这一自然现象中汲取灵感。极光是由太阳风中的带电粒子在地球磁场的作用下,与地球大气层中的气体分子碰撞而产生的光显示。PLO算法通过模拟这些带电粒子的运动轨迹和动力学过程,提出了一种有效的优化策略,旨在解决复杂的优化问题。

1.PLO算法的核心思想
PLO算法的核心思想是模拟带电粒子在地球磁场中的运动,包括它们的旋转运动(gyration motion)、在极光椭圆区域内的行走(aurora oval walk),以及粒子间的碰撞(particle collision)。这些运动策略不仅模拟了自然界中粒子的行为,而且被设计用来平衡算法的全局探索能力和局部开发能力。

2.PLO算法的主要组成部分
-
旋转运动(Gyration Motion):
- 模拟带电粒子在地球磁场作用下沿磁力线的旋转运动。这种运动有助于算法在局部区域内进行细致的搜索,提高解的精度。

- 模拟带电粒子在地球磁场作用下沿磁力线的旋转运动。这种运动有助于算法在局部区域内进行细致的搜索,提高解的精度。
-
极光椭圆行走(Aurora Oval Walk):
- 模拟带电粒子在极光椭圆区域内的自由移动,这种策略有助于算法进行全局探索,寻找更广泛的解空间。

- 模拟带电粒子在极光椭圆区域内的自由移动,这种策略有助于算法进行全局探索,寻找更广泛的解空间。
-
粒子碰撞策略(Particle Collision Strategy):
- 模拟带电粒子间的相互碰撞,这种策略有助于算法跳出局部最优解,增强解的多样性。

- 模拟带电粒子间的相互碰撞,这种策略有助于算法跳出局部最优解,增强解的多样性。
3.PLO算法的实现步骤


-
初始化:
- 生成一个初始粒子群,每个粒子代表一个潜在的解。
-
适应度评估:
- 对每个粒子计算其适应度值,即评估它们在优化问题中的表现。
-
更新最优解:
- 根据适应度值,确定当前找到的最优解。
-
迭代过程:
- 重复以下步骤直到满足停止条件(如达到最大迭代次数或达到预定的适应度阈值):
a. 更新粒子速度和位置:根据旋转运动和极光椭圆行走策略更新粒子的速度和位置。
b. 粒子碰撞:以一定的概率执行粒子碰撞策略,进一步更新粒子的位置。
c. 适应度评估:对更新后的粒子群再次进行适应度评估。
d. 更新最优解:如果找到更好的解,则更新全局最优解。
- 重复以下步骤直到满足停止条件(如达到最大迭代次数或达到预定的适应度阈值):
-
输出最优解:
- 迭代结束后,输出找到的最优解或最优解集合。
参考文献:
[1]Yuan, Chong, Dong Zhao, Ali Asghar Heidari, Lei Liu, Yi Chen and Huiling Chen. “Polar lights optimizer: Algorithm and applications in image segmentation and feature selection.” Neurocomputing 607 (2024): 128427.
二、无人机(UAV)三维路径规划
单个无人机三维路径规划数学模型参考如下文献:
Phung M D , Ha Q P . Safety-enhanced UAV Path Planning with Spherical Vector-based Particle Swarm Optimization[J]. arXiv e-prints, 2021.
每个无人机的目标函数由路径长度成本,安全性与可行性成本、飞行高度成本和路径平滑成本共同组成:
2.1路径长度成本
路径长度成本由相邻两个节点之间的欧氏距离和构成,其计算公式如下:

2.2路径安全性与可行性成本

路径安全性与可行性成本通过下式计算:

2.3路径飞行高度成本

飞行高度成本通过如下公式计算所得:


2.4路径平滑成本

投影向量通过如下公式计算:

转弯角度的计算公式为:

爬坡角度的计算公式为:

平滑成本的计算公式为:

2.5总成本(目标函数)

总成本由最优路径成本,安全性与可行性成本、飞行高度成本和路径平滑成本的线性加权所得。其中,b为加权系数。
三、实验结果
在三维无人机路径规划中,无人机的路径由起点,终点以及起始点间的点共同连接而成。因此,自变量为无人机起始点间的各点坐标,每个无人机的目标函数为总成本(公式9)。本文研究3个无人机协同路径规划,总的目标函数为3个无人机的总成本之和。
Xmin=[Xmin0,Xmin1,Xmin2];
Xmax=[Xmax0,Xmax1,Xmax2];
dim=dim0+dim1+dim2;
fobj=@(x)GetFun(x,fobj0,fobj1,fobj2);%总的目标函数
pop=50;
maxgen=1500;[fMin ,bestX,Convergence_curve]=eco(pop,maxgen,Xmin,Xmax,dim,fobj);%Trajectories,fitness_history, population_history
% save bestX bestX
BestPosition1 = SphericalToCart(bestX(1:dim/3),model);% 第一个无人机得到的路径坐标位置
BestPosition2 = SphericalToCart(bestX(1+dim/3:2*dim/3),model1);% 第二个无人机得到的路径坐标位置
BestPosition3 = SphericalToCart(bestX(1+2*dim/3:end),model2);% 第三个无人机得到的路径坐标位置gca1=figure(1);
gca2=figure(2);
gca3=figure(3);
PlotSolution(BestPosition1,model,gca1,gca2,gca3);% 画第一个无人机
PlotSolution1(BestPosition2,model1,gca1,gca2,gca3);% 画第二个无人机
PlotSolution2(BestPosition3,model2,gca1,gca2,gca3);% 画第三个无人机figure
plot(Convergence_curve,'LineWidth',2)
xlabel('Iteration');
ylabel('Best Cost');
grid on;


相关文章:
基于极光优化算法(Polar Lights Optimization, PLO)的多无人机协同三维路径规划(提供MATLAB代码)
一、极光优化算法介绍 极光优化算法(Polar Lights Optimization, PLO)是2024年提出的一种新型的元启发式优化算法,它从极光这一自然现象中汲取灵感。极光是由太阳风中的带电粒子在地球磁场的作用下,与地球大气层中的气体分子碰撞…...

TypeScript类型体操5
类型编程主要的目的就是对类型做各种转换,如何对类型做修改? TypeScript 类型系统支持 3 种可以声明任意类型的变量: type、infer、类型参数。 type:类型别名,声明一个变量存储某个类型。type t Promise<number&g…...

搭建广告展示页Start
想自定义广告- 场景: app冷启动/热启动-有广告需求,就打开广告页,没有的话就去登录或者主页 有的app有的需要广告页,有的不需要,搞个配置呗!!! 通过首选项配置存储我们的一些常用…...
课程计划)
无极低码基础版(部署版)课程计划
基础版(部署版)使用指南 特点 简单:1分钟学会无需编码:会SQL即可适合人群:纯小白0代码写服务1. 本地环境安装 JDKMySQLRedisTomcat2. 环境变量配置 JDK无极低码授权3. 配置文件修改 4. 服务启动 5. 服务发布示例 服务手动注册SQL语句注册6. 新增接口示例 正常新增非空参…...

Word文档功能快捷键大全
以下是 Microsoft Word 的全面快捷键大全,涵盖了文档操作、文本编辑、格式化、导航等多种功能,帮助你提高工作效率。 Word 全面快捷键和快捷方式表 功能类别快捷键/快捷方式功能描述基本文档操作Ctrl N新建文档Ctrl O打开文档Ctrl S保存文档F12另存…...
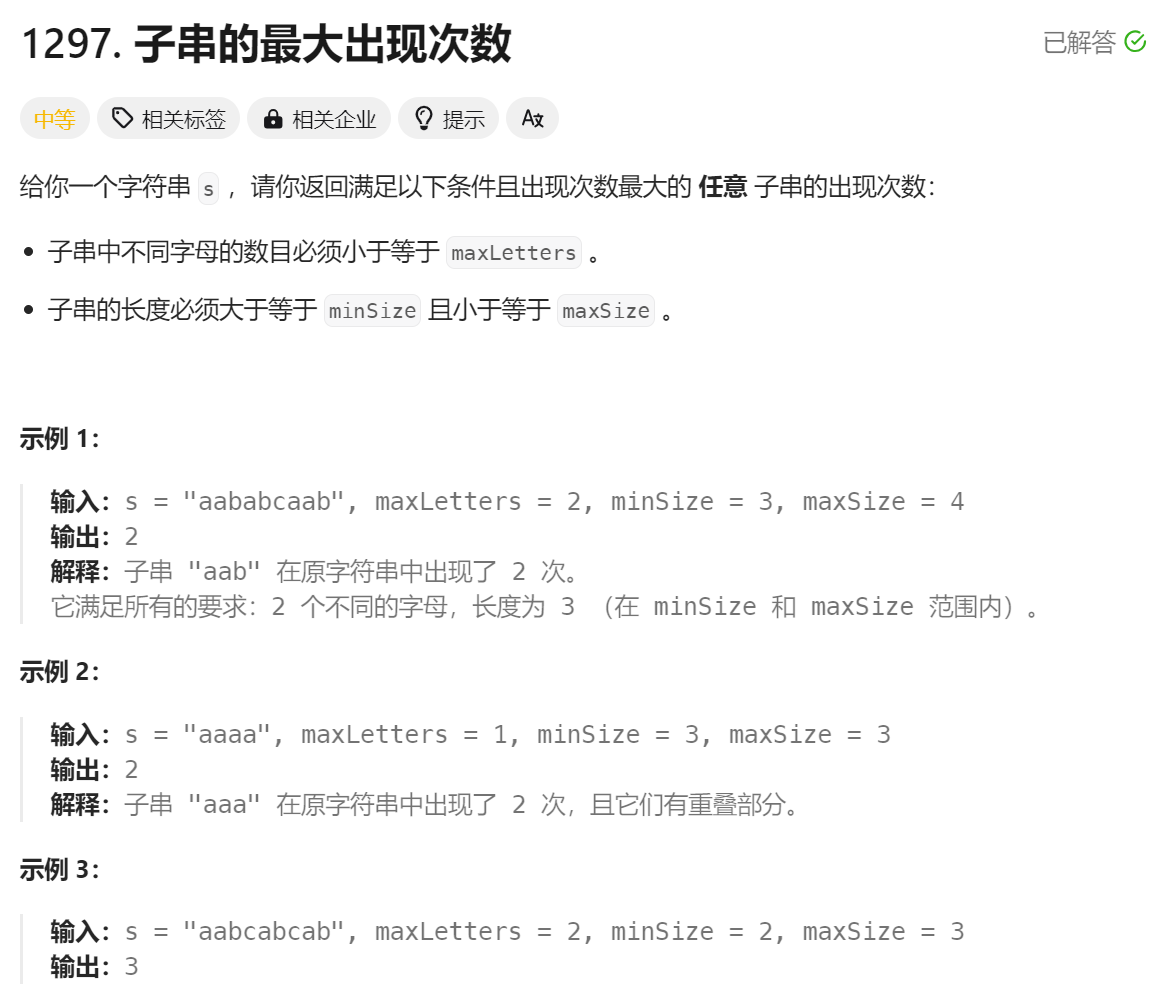
题目:1297. 子串的最大出现次数
> Problem: 1297. 子串的最大出现次数 题目:1297. 子串的最大出现次数 题目描述 给定一个字符串 s,要求找到满足以下条件的任意子串的出现次数,并返回该子串的最大出现次数: 子串中不同字母的数目必须小于等于 maxLetters。…...

一力破万法,高并发系统优化通解思路
高并发系统优化:从理论到Java实践 针对高并发场景,以下策略能够有效提升系统的稳定性和响应速度: 加集群 结果:通过增加服务器数量,实现负载均衡,提高系统整体处理能力。过程: 配置负载均衡器&…...

P8635 [蓝桥杯 2016 省 AB] 四平方和
对于一个给定的正整数,可能存在多种平方和的表示法。 要求你对 44个数排序使得 0≤a≤b≤c≤d。 输入 #1复制 5 输出 #1 0 0 1 2 输入 #2 12 输出 #2 0 2 2 2 输入 #3 773535 输出 #3 1 1 267 838 代码 #include<bits/stdc.h> using namespace …...

ElasticSearch是什么?
1.概述 Elasticsearch 是一个基于 Apache Lucene 构建的开源分布式搜索引擎和分析引擎。它专为云计算环境设计,提供了一个分布式的、高可用的实时分析和搜索平台。Elasticsearch 可以处理大量数据,并且具备横向扩展能力,能够通过增加更多的硬…...

2024年四非边缘鼠鼠计算机保研回忆(记录版 碎碎念)
Hi,大家好,我是半亩花海。写下这篇博客时已然是金秋十月,心中的石头终于落地,恍惚间百感交集。对于保研这条路,我处于摸着石头过河、冲击、随缘的这些状态。计算机保研向来比其他专业难,今年形势更是艰难。…...

clickhouse常用脚本语句
1.创建库和删除库 drop database IF EXISTS rt_db CREATE DATABASE rt_db ENGINE = Ordinary; CREATE DATABASE rt_db ENGINE = Atomic;2.创建表 CREATE TABLE IF NOT EXISTS intellect_alarm_info ( `id` UInt64 , `client_info_id...

GeneMark软件的秘钥gm_key失效怎么办?
GeneMark软件的gm_key失效怎么办 1. 下载网址(为软件的下载界面):http://topaz.gatech.edu/GeneMark/license_download.cgi 2.下载界面 根据自己的需求下载对应的版本和类型的gm_key秘钥 3.填写注册信息 4. 点击下载软件和密钥 5. 将秘钥…...

线性回归逻辑回归-笔记
一、线性回归(Linear Regression) 1. 定义 线性回归是一种用于回归问题的算法,旨在找到输入特征与输出值之间的线性关系。它试图通过拟合一条直线来最小化预测值与真实值之间的误差。 2. 模型表示 线性回归模型假设目标变量(输…...

如何将数据从 AWS S3 导入到 Elastic Cloud - 第 1 部分:Elastic Serverless Forwarder
作者:来自 Elastic Hemendra Singh Lodhi 这是多部分博客系列的第一部分,探讨了将数据从 AWS S3 导入 Elastic Cloud 的不同选项。 Elasticsearch 提供了多种从 AWS S3 存储桶导入数据的选项,允许客户根据其特定需求和架构策略选择最合适的方…...

Linux基础-正则表达式
正则表达式概述 正则表达式是处理字符串的一种工具,可以用于查找、删除、替换特定的字符串,主要用于文件内容的处理。与之不同的是,通配符则用于文件名称的匹配。正则表达式通过使用特殊符号,帮助用户轻松实现对文本的操作。 一…...

【HTML格式PPT离线到本地浏览】
文章目录 概要实现细节小结 概要 最近在上课时总是出现网络不稳定导致的PPT无法浏览的情况出现,就想到下载到电脑上。但是PPT是一个HTML的网页,无法通过保存网页(右键另存为mhtml只能保存当前页)的形式全部下载下来,试…...

如何在Vue项目中封装axios
文章目录 一、axios简介基本使用 二、封装axios的原因三、封装axios的方法1. 设置接口请求前缀2. 设置请求头和超时时间3. 封装请求方法4. 添加请求拦截器5. 添加响应拦截器小结 一、axios简介 axios 是一个基于 XMLHttpRequest 的轻量级HTTP客户端,适用于浏览器和…...

linux 配置ssh免密登录
一、 cd /root/.ssh/ #不存在就创建mkdir /root/.ssh ssh-keygen #连续按4个回车 ll二、将公钥发送到目标服务器下 #公钥上传到目标服务器 ssh-copy-id root192.168.31.142 #回车完也是要输入密码的 #测试一下免密登录: ssh root192.168.31.142 成功...

【AI绘画】Midjourney进阶:三分线构图详解
博客主页: [小ᶻZ࿆] 本文专栏: AI绘画 | Midjourney 文章目录 💯前言💯什么是构图为什么Midjourney要使用构图 💯三分线构图特点使用场景提示词书写技巧测试 💯小结 💯前言 【AI绘画】Midjourney进阶&a…...
)
享元模式(C++)
定义:享元模式是一种结构型设计模式,它使用共享对象,用以尽可能减少内存使用和提高性能。享元模式通过共享已经存在的对象实例,而不是每次需要时都创建新对象实例,从而避免大量重复对象的开销。 对比: 与单…...

SmarterRouter:基于软件定义与模块化构建智能路由器系统
1. 项目概述:一个更聪明的路由器,它到底想做什么?如果你和我一样,折腾过家里的网络,从刷第三方固件到组软路由,那你肯定对“路由器”这三个字有复杂的感情。它本该是默默无闻的网络基石,却常常因…...

基于PIR传感器与LIFX智能灯泡的物联网运动感应照明系统实战
1. 项目概述与核心价值如果你对智能家居自动化感兴趣,并且想亲手打造一个既实用又有趣的照明项目,那么这个基于Adafruit FunHouse和LIFX智能灯泡的运动感应照明系统,绝对是一个绝佳的起点。它不仅仅是一个“开灯关灯”的简单触发器࿰…...

Emacs AI编程助手:ai-code-interface.el深度集成指南
1. 项目概述:一个为Emacs注入AI灵魂的代码接口如果你是一位Emacs的深度用户,同时又对AI辅助编程抱有极大的热情,那么你很可能已经厌倦了在浏览器、终端和编辑器之间反复横跳的割裂体验。tninja/ai-code-interface.el这个项目,正是…...

终极显卡调校指南:如何用NVIDIA Profile Inspector释放游戏性能
终极显卡调校指南:如何用NVIDIA Profile Inspector释放游戏性能 【免费下载链接】nvidiaProfileInspector 项目地址: https://gitcode.com/gh_mirrors/nv/nvidiaProfileInspector NVIDIA Profile Inspector是一款专为NVIDIA显卡用户设计的免费优化工具&…...

三维重建实时映射技术在智慧水利中的核心应用
三维重建实时映射技术在智慧水利中的核心应用在国家大力推进数字孪生水利建设、实现水安全精准保障的背景下,智慧水利已从传统监测、调度向全域感知、智能预判、协同处置、一屏统管升级。智慧水利的核心目标,是实现对江河湖库、灌区、泵站、堤坝、闸站等…...

终极指南:如何使用League-Toolkit英雄联盟工具箱快速提升游戏效率
终极指南:如何使用League-Toolkit英雄联盟工具箱快速提升游戏效率 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 还在为英雄联盟中…...

如何在Windows 11上让经典游戏重获新生:DDrawCompat兼容性解决方案详解
如何在Windows 11上让经典游戏重获新生:DDrawCompat兼容性解决方案详解 【免费下载链接】DDrawCompat DirectDraw and Direct3D 1-7 compatibility, performance and visual enhancements for Windows Vista, 7, 8, 10 and 11 项目地址: https://gitcode.com/gh_m…...

构建个人技能库:用GitHub+Markdown打造开发者的第二大脑
1. 项目概述:从“我的Copaw技能”看个人技能库的构建与管理最近在GitHub上看到一个挺有意思的项目,叫“my-copaw-skill”。这个项目名本身就很有故事感,“Copaw”这个词,我猜是“Code”和“Paw”(爪子)的结…...

详解C++作用域与生命周期
Pascal之父Nicklaus Wirth曾经提出一个公式,展示出了程序的本质:程序算法数据结构。后人又给出一个公式与之遥相呼应:软件程序文档。这两个公式可以简洁明了的为我们展示程序和软件的组成。程序的运行过程可以理解为算法对数据的加工过程&…...

5分钟掌握浏览器串口调试:提升嵌入式开发效率300%的终极指南
5分钟掌握浏览器串口调试:提升嵌入式开发效率300%的终极指南 【免费下载链接】SerialAssistant A serial port assistant that can be used directly in the browser. 项目地址: https://gitcode.com/gh_mirrors/se/SerialAssistant 你是否还在为串口调试工具…...