Navigation2 算法流程
转自 https://zhuanlan.zhihu.com/p/405670882
此文仅作学习笔记
启动流程
在仿真环境中启动导航包的示例程序,执行nav2_bringup/bringup/launch/tb3_simulation_launch.py文件。ROS2的launch文件支持采用python语言来编写以支持更加复杂的功能,本文件的主要功能如下:
- 声明各参数变量赋值
- 启动gazebo
- 并加载模型
- 启动robot_state_publisher ros包,加载URDF文件发布静态机器人坐标变换关系
- 启动rviz
- 包含
bringup_launch.py文件并传递参数
在bringup_launch.py文件中包含了导航相关的算法启动内容。在文件中实现的主要功能为
- 加载参数
- 如果采用SLAM构建地图则启动SLAM算法文件
slam_launch.py - 不使用SLAM算法,则运行定位算法启动文件
localization_launch.py。 - 运行导航算法启动文件
navigation_launch.py
这里我们仅看导航和定位两个文件。
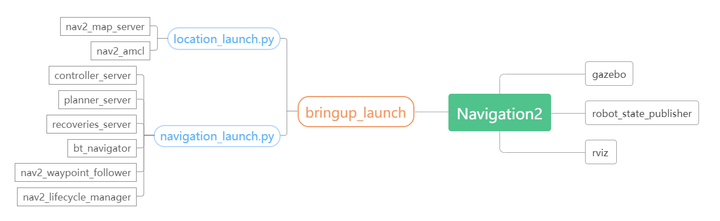
在location_launch.py文件中启动两个节点,nav2_map_server和nav2_amcl。在navigation_launch.py文件中则启动controller_server、planner_server、recoveries_server、bt_navigator和nav2_waypoint_follower算法包。至于nav2_lifecycle_manager包则为其他所有包的节点管理功能,可以暂时不理会。
因此,Navigation2启动流程如下
定位部分
定位部分代码较为简单,具体功能主要是
- 发布地图信息(
nav2_map_server) - 发布机器人位置信息(
nav2_amcl)
这一部分需要注意的仅仅是AMCL定位时的坐标变换关系,在单纯的里程计中发布的是/odom_frame到\base_frame的坐标关系,而acml确定的是地图坐标系/map_frame和/odom_frame的关系,即可以认为里程计
确定从起始位置出发的局部定位信息,而amcl算法确定局部定位信息和全局地图之间的坐标关系。

导航部分
调用接口流程
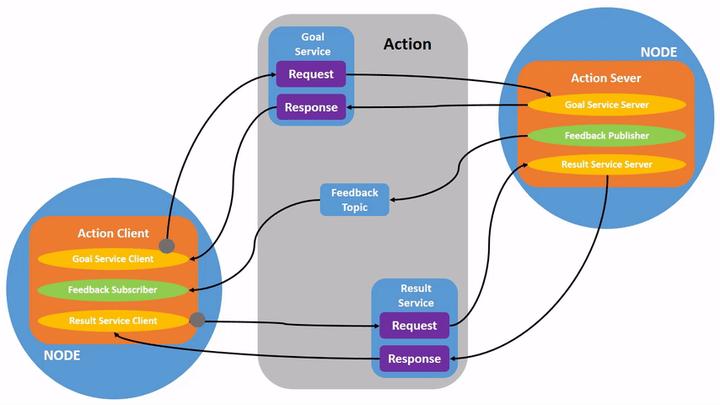
Action 机制
Navigation2 高度依赖于ROS的Action通信机制
,因此有必要对其有个大致了解。
基本的通信流程为
- 客户端发布启动消息给服务端
- 服务端响应启动消息,并执行动作
- 服务端在执行动作时返回当前执行动作进度
- 服务端执行动作结束,返回执行结果
- 客户端响应执行结果
根据action消息的特点,将导航节点分为两个部分,一是具体的算法实现作为服务端,二是算法调用逻辑控制
实现作为客户端
算法执行服务端
planner_server路径规划服务器,接受客户端的路径规划请求后计算路径并发布。
接收Action
compute_path_to_posecompute_path_through_poses
发布消息
plan
controller_server机器人控制
服务器,接受客户端开始跟随当前路径的请求,然后发布控制机器人运动指令。
接收Action
follow_path
接收消息
odom(实际上是定位消息)speed_limit
发布控制指令
cmd_vel
recoveries_server故障恢复服务器,在机器人运动异常时进行处理。
接收Action
spinbackupwait
发布控制指令
cmd_vel
根据上述三个模块功能的描述,可以大致的想到导航功能的实现分为首先调用路径规划
算法得到一个可行路线,然后调用跟随路径接口,在跟随的同时监控机器人是否出现异常,若出现异常则打断机器人跟随路径并执行故障恢复,要么后退要么旋转或者等待动态障碍物走开。而Navigation2中的实现则更为具体和详细。
算法调用逻辑客户端
Navigation2 的导航控制逻辑采用行为树实现,该方法常被用在游戏开发中,类似于状态机
的功能但更为强大。
行为树
Navigation2中实现了四种行为树插件,分别为,动作,条件,控制,修饰。接下来简单介绍各自的功能,详细的行为树功能可参考BehaviorTree.CPP库的描述 。
动作行为树的叶子节点,调用一个动作就代表执行一段算法或者控制机器人运动。
条件判断子节点是否执行的条件
控制子节点执行的流程控制,顺序执行
,或循环执行
修饰修饰当前子节点,比如设置子节点循环执行5次,或者修改子节点
返回值
在Navigation2中实现许多的行为树插件,主要有
- 动作:
- 动作:
bt_navigator
将上述行为树
插件组合起来,便可以得到完整的导航控制逻辑,采用xml文件配置得到。
具体采用流程图
的形式表达如下

至此,我们便大致理清了导航包的逻辑。目前对于整体的导航框架,还剩下代价地图
功能没有进行描述。
代价地图
代价地图分为局部代价地图
和全局代价地图,分别在全局路径规划和局部路径规划中新建单独的线程进行计算。代价地图采用多图层的结构,用来确定可行区域以及手动设置限速区域,手动设置静止入内区域等。
相关文章:
Navigation2 算法流程
转自 https://zhuanlan.zhihu.com/p/405670882 此文仅作学习笔记 启动流程 在仿真环境中启动导航包的示例程序,执行nav2_bringup/bringup/launch/tb3_simulation_launch.py文件。ROS2的launch文件支持采用python语言来编写以支持更加复杂的功能,本文件…...

OpenAI swarm+ Ollama快速构建本地多智能体服务 - 1. 服务构建教程
OpenAI开源了多智能体编排的工程swarm,今天介绍一下swarm与OLLAMA如何结合使用的教程,在本地构建自己的多智能体服务,并给大家实践演示几个案例。 安装步骤 安装ollama,在官网下载对应操作系统的版本即可,下载后用ol…...

HTB:Wifinetic[WriteUP]
目录 连接至HTB并启动靶机 1.What is the name of the OpenWRT backup file accessible over FTP? 使用nmap对靶机21、22端口进行脚本、服务信息扫描 2.Whats the WiFi password for SSID OpenWRT? 3.Which user reused the WiFi password on thier local account? 4.…...

专业学习|马尔可夫链(概念、变体以及例题)
一、马尔可夫链的概念及组成 (一)学习资料分享 来源:024-一张图,但讲懂马尔可夫决策过程_哔哩哔哩_bilibili 马尔可夫链提供了一种建模随机过程的方法,具有广泛的应用。在实际问题中,通过转移概率矩阵及初…...

RK3576 安卓SDK编译环境搭建
编译 Android14 对机器的配置要求较高: 建议预留500G存储 多分配CPU和内存 建议使用 Ubuntu 20.04 操作系统或更高版本 sudo apt-get updatesudo apt-get install make gcc sudo apt-get install g++ patchelf gawk texinfo chrpath diffstat binfmt-support sudo apt-get …...

Renesas R7FA8D1BH (Cortex®-M85) 上光电编码器测速功能
目录 概述 1 软硬件 1.1 软硬件环境信息 1.2 开发板信息 1.3 调试器信息 2 硬件架构 2.1 硬件框架结构 2.2 测速功能原理介绍 2.2.1 理论描述 2.2.2 实现原理 2.2.3 系统硬件结构 3 软件实现 3.1 FSP配置项目 3.2 代码实现 3.2.1 初始化函数 3.2.2 功能函数 3.…...

软件测试学习笔记丨Linux三剑客-sed
本文转自测试人社区,原文链接:https://ceshiren.com/t/topic/32521 一、简介 sed(Stream editor)是一个功能强大的文本流编辑器,主要用于对文本进行处理和转换。它适用于自动化处理大量的文本数据,能够支持…...

Vue脚手架学习 vue脚手架配置代理、插槽、Vuex使用、路由、ElementUi插件库的使用
目录 1.vue脚手架配置代理 1.1 方法一 1.2 方法二 2.插槽 2.1 默认插槽 2.2 具名插槽 2.3 作用域插槽 3.Vuex 3.1 概念 3.2 何时使用? 3.3 搭建vuex环境 3.4 基本使用 3.5 getters的使用 3.6 四个map方法的使用 3.6.1 mapState方法 3.6.2 mapGetter…...

使用yml文件安装环境时,如何添加conda和pip的镜像源
博客参考 添加conda镜像源 name: NAME channels:- conda-forge- pytorch- https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main- https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/r- https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/msys2- defaults depende…...

c语言经典100例
1.字符串转为数字 #include <stdio.h>int strToInt(char *s) {int num0;int sign1;int step1;if (*s -){sign -1;s;}while (*s > 0&&*s < 9){num num*10(*s-0);step 10;s;}return num*sign; }int main() {char a[10] "-1234";char *s a ;pr…...

百易云资产管理运营系统 ufile.api.php SQL注入漏洞复现
0x01 产品描述: 百易云资产管理运营系统,是专门针对企业不动产资产管理和运营需求而设计的一套综合解决方案。该系统能够覆盖资产的全生命周期管理,包括资产的登记、盘点、评估、处置等多个环节,同时提供强大的运营分析功能&#…...

【分布式微服务云原生】《Redis RedLock 算法全解析:应对时钟漂移与网络分区挑战》
《Redis RedLock 算法全解析:应对时钟漂移与网络分区挑战》 摘要: 本文深入探讨 Redis 的 RedLock 算法,详细阐述其步骤及工作原理,同时重点分析该算法如何处理时钟漂移和网络分区这两个常见的分布式系统问题。读者将通过本文深入…...

OceanBase 的写盘与传统数据库有什么不同?
背景 在数据库开发过程中,“写盘”是一项核心操作,即将内存中暂存的数据安全地转储到磁盘上。在诸如MySQL这样的传统数据库管理系统中,写盘主要有以下几步:首先将数据写入缓存池;其次,为了确保数据的完整性…...

用Java爬虫API,轻松获取taobao商品SKU信息
在电子商务的世界里,SKU(Stock Keeping Unit,库存单位)是商品管理的基础。对于商家来说,SKU的详细信息对于库存管理、价格策略制定、市场分析等都有着重要作用。taobao作为中国最大的电子商务平台之一,提供…...

OpenHarmony 入门——ArkUI 自定义组件内同步的装饰器@State小结(二)
文章大纲 引言一、组件内状态装饰器State1、初始化2、使用规则3、变量的传递/访问规则说明4、支持的观察变化的场景5、State 变量的值初始化和更新机制6、State支持联合类型实例 引言 前一篇文章OpenHarmony 入门——ArkUI 自定义组件之间的状态装饰器小结(一&…...

【Linux驱动开发】嵌入式Linux驱动开发基本步骤,字符设备开发入门,点亮LED
【Linux驱动开发】嵌入式Linux驱动开发基本步骤,字符设备开发入门,点亮LED 文章目录 开发环境驱动文件编译驱动安装驱动自动创建设备节点文件 驱动开发驱动设备号地址映射,虚拟内存和硬件内存地址字符驱动旧字符驱动新字符驱动 应用程序开发…...

搬砖14、Python网络编程入门
网络编程入门 计算机网络基础 计算机网络是独立自主的计算机互联而成的系统的总称,组建计算机网络最主要的目的是实现多台计算机之间的通信和资源共享。今天计算机网络中的设备和计算机网络的用户已经多得不可计数,而计算机网络也可以称得上是一个“复…...

Transformer: Attention is All you need
Transformer Transformer是基于Encoder-Decoder结构的,将Seq2Seq中的RNN/GRU部分更换为Self-Attention部分 位置编码 Positional Encoding Self-attention丢失了位置信息 CNN 卷积神经网络可以保存相邻的位置信息 RNN 是顺序输入的,是包含了位置信息…...

C++:排序算法
目录 一、插入排序 1.直接插入排序 2.希尔排序 二、交换排序 1.冒泡排序 2.快速排序 三、选择排序 1.简单选择排序 2.堆排序 四、归并排序 1.二路归并排序的递归实现 2.二路归并排序的非递归实现 一、插入排序 1.直接插入排序 直接插入排序的基本思想是ÿ…...
期货日内稳赢策略:双15交易法详解
Eagle Trader的考试不仅涵盖了CFD交易,期货交易的考生人数也颇为可观。与外汇市场相比,期货在国内市场的普及程度更高,参与的群体也更为广泛。这得益于期货市场在国内相对成熟的监管体系,使得交易员对期货有了更深入的了解和信任。…...

AI赋能5G核心网故障诊断:从PCAP解析到智能根因分析的工程实践
1. 项目概述:当AI遇见5G核心网故障诊断在5G核心网的运维与测试一线干了这么多年,最头疼的莫过于面对海量的PCAP抓包文件。一个复杂的信令流程下来,动辄几千甚至上万个数据包,工程师需要像侦探一样,逐帧审视协议交互&am…...

告别拍脑袋规划!用ArcGIS做绿道选线:如何科学量化坡度、水域、道路成本并加权计算
科学规划绿道的ArcGIS高阶技法:从成本栅格构建到最优路径生成绿道规划从来不是简单的"两点之间直线最短",而是需要综合考虑地形、生态、人文等多维因素的复杂决策过程。传统规划中常见的"拍脑袋"决策方式,往往导致建成后…...

BLE蓝牙扫描深度剖析:扫描原理、核心参数、前后台差异
一、前言BLE设备交互分为两大角色:广播端(外设Peripheral)与扫描端(中心Central)。上一篇博客详解了四大广播模式,本文聚焦配套核心能力——BLE扫描机制。绝大多数蓝牙开发疑难问题:前台能扫后台…...

物联网与云技术赋能咖啡后处理:CeriTech 的实时监控系统实践
1. 项目概述:用物联网与云技术重塑咖啡后处理在印尼的咖啡农场里,传统的发酵与干燥过程很大程度上依赖“感觉”和“经验”。一位有经验的农人可能会用手触摸、用鼻子闻,或者根据天气和日照时间来估算发酵是否完成、干燥是否均匀。这种方法固然…...

Java数组工具类实战:设计不可实例化的静态工具类
实现一个工具类 MathUtils,满足以下要求: 1. 所有方法均为静态,且该类不能从外部实例化(提示:使用私有构造器)。 2. 提供三个静态方法:- maxArray(int[] arr):返回较大值;…...

别再盲跑了!手把手教你用Arduino Zero在IDE 2.0里设置断点单步调试
告别盲跑时代:Arduino Zero与IDE 2.0的源码级调试实战指南 当你的Arduino项目逻辑越来越复杂,仅靠串口打印调试就像在迷宫里摸黑前行——直到遇见Arduino Zero与IDE 2.0的调试组合。本文将揭示如何用这套工具实现 源码级精准调试 ,即使你手…...

SSH工具对比:新手用户和熟练运维,选型逻辑有什么不同
结论 新手用户和熟练运维在选择 SSH 工具时,关注点往往完全不同。 新手更在意的是:能不能顺利连接、界面是否直观、文件和配置是否容易找到、网站出问题时能不能快速定位。 而熟练运维更在意的是:连接效率、命令自由度、多服务器管理能力、原…...

鸿蒙系统微博应用锁常见问题解答
为微博设置应用锁后,不少用户会有各种疑问:忘记密码怎么办?会不会影响消息推送?能不能只锁定某些功能?应用锁耗电吗?本文将针对这些高频问题逐一解答,帮助您更好地使用鸿蒙系统(Harm…...
损坏诊断全解)
半导体元件(二极管/三极管/MOS管/IC)损坏诊断全解
半导体元件(二极管、三极管、MOS 管、集成电路)是 PCB 的核心功能单元,对过压、过流、ESD、高温极度敏感,损坏后直接导致电路功能失效、短路烧板。很多工程师维修时盲目更换芯片,不仅成本高,还易误判。一…...

榨干Codex!OpenAI工程师亲授Codex真正用法
你可能把 Codex 当编程助手用,改改代码,跑跑测试。但它的能力远不止于此。OpenAI 的客户支持工程师 Jason(jxnlco)告诉你,Codex 其实是一套完整的电脑工作系统,从语音输入到自动化,从浏览器操控…...