【scene_manager】与 MoveIt 机器人的规划场景进行交互
scene_manager
Scene Manager包是由 Robotnik 创建的 ROS 包,旨在帮助构建和与 MoveIt 机器人的规划场景进行交互。
背景信息
MoveIt 规划场景
- 是一个用于存储机器人周围世界的表示(外部碰撞)以及机器人自身状态(内部碰撞和当前位置)的对象。
- 碰撞环境可以使用 MoveIt 碰撞对象或 Octomap 构建。
- 规划场景在路径规划期间被 MoveIt 使用,以获取无碰撞的轨迹。
- 准确表示世界是非常重要的。
- MoveIt 允许用户与规划场景中存在的碰撞对象进行交互(附加、分离对象)。
Scene Manager
- 便于创建规划场景以及与规划场景的交互。
- 继承自
moveit::planning_interface::PlanningSceneInterface类的 C++ 类。 - 提供一个 API,允许用户轻松与 MoveIt 规划场景进行交互。
优势
- MoveIt 碰撞对象可以在 YAML 文件中轻松定义,并且可以随时修改。
- 允许用户构建相同对象的矩阵(适用于托盘化应用)。
- 添加了与对象交互的新功能(例如:相对于对象移动,启用/禁用与对象的碰撞检测等)。
- 暴露 ROS 服务以调用所有 Scene Manager 功能,外部用户可以轻松与环境交互。
- 包含 RViz 中对象名称的可视化。
- 在 TF 树中发布相对于世界的对象框架。
如何将 Scene Manager 添加到项目中
-
将 scene_manager 和 scene_manager_msgs 包添加到 catkin 工作空间。
-
在将使用 Scene Manager 的 ROS 包中,在
CMakeLists.txt和package.xml文件中添加对上述包的依赖。 -
将 Scene Manager 库添加到您正在开发的 CPP 节点中:
#include <corosect_manipulation/scene_manager.h> -
创建 SceneManager 类的对象:
ros::NodeHandle nh; // 初始化 Scene Manager bool wait = true; std::unique_ptr<SceneManager> scene_manager_ = std::make_unique<SceneManager>(nh, wait);
Scene Manager YAML
允许用户轻松将碰撞对象添加到规划场景中,每个对象需要添加以下属性:
- spawn: 默认情况下,对象在 Scene Manager 初始化场景时被添加到规划场景中。
- static: 静态对象无法被操作,也无法改变其在空间中的位置。
- frame_id: 对象在场景中的位置相对于此坐标轴定义。
- geometry: 几何形状(盒子)或网格文件的路径(
package://ros_package_name/route_to_file_folder/mesh_file_name.stl)。 - pose: 相对于
frame_id坐标轴的 xyz 位移或 rpy 方向。 - layout: 可用于添加当前对象的矩阵(例如:带有箱子的托盘)。

Scene Manager 功能
Scene Manager 类提供以下方法:
- SceneManager::initScene(): 将 YAML 文件中定义的对象添加到规划场景中。
- SceneManager::addObjects(vector object_ids): 将特定对象添加到规划场景中。
- SceneManager::removeObjects(vector object_ids): 从规划场景中移除特定对象。
- SceneManager::attachObjects(vector object_ids): 将碰撞对象附加到末端执行器。
- SceneManager::detachObjects(vector object_ids): 从末端执行器分离碰撞对象。
- SceneManager::moveRelativeTo(string object_id, rel_pose): 以相对于给定对象的
frame_id的相对姿态移动末端执行器。 - SceneManager::allowCollision(string link_id, vector objects_id): 允许机器人链接或碰撞对象与其他碰撞对象之间发生碰撞。
- SceneManager::restoreCollision(string link_id, vector objects_id): 恢复机器人链接或碰撞对象与其他碰撞对象之间的碰撞避免。
Scene Manager ROS 服务
Scene Manager 提供 ROS 服务以调用所有 Scene Manager 功能,外部用户可以轻松与机械臂和场景进行交互。
/scene_manager/add_objects/scene_manager/remove_objects/scene_manager/attach_objects/scene_manager/detach_objects/scene_manager/modify_object/scene_manager/move_relative_to
相关文章:
【scene_manager】与 MoveIt 机器人的规划场景进行交互
scene_manager Scene Manager包是由 Robotnik 创建的 ROS 包,旨在帮助构建和与 MoveIt 机器人的规划场景进行交互。 背景信息 MoveIt 规划场景 是一个用于存储机器人周围世界的表示(外部碰撞)以及机器人自身状态(内部碰撞和当…...

数据结构单向链表的插入和删除(一)
链表 一、链表结构: (物理存储结构上不连续,逻辑上连续;大小不固定)二、单链表:三、单项链表的代码实现:四、开发可用的链表:四、单链表的效率分析: 一、链表结构&#x…...
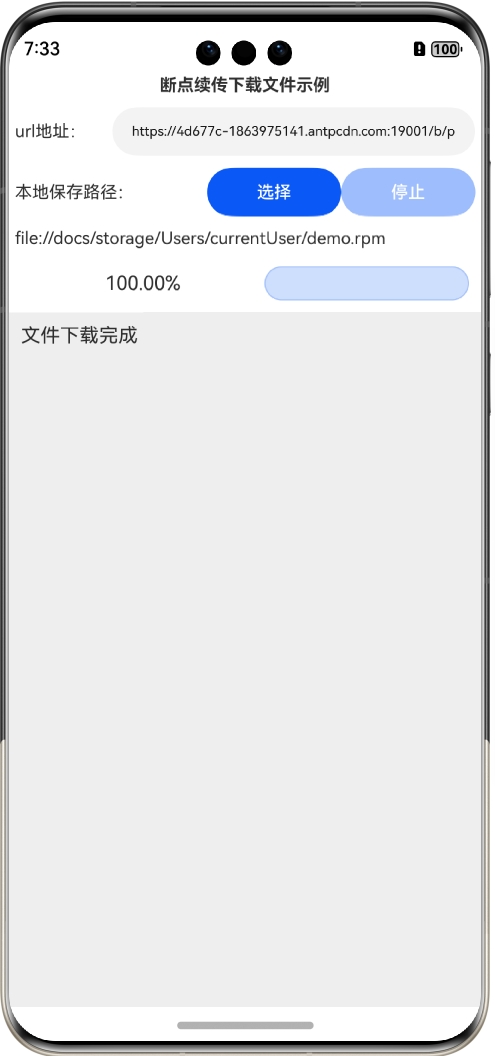
鸿蒙网络编程系列30-断点续传下载文件示例
1. 断点续传简介 在文件的下载中,特别是大文件的下载中,可能会出现各种原因导致的下载暂停情况,如果不做特殊处理,下次还需要从头开始下载,既浪费了时间,又浪费了流量。不过,HTTP协议通过Range…...
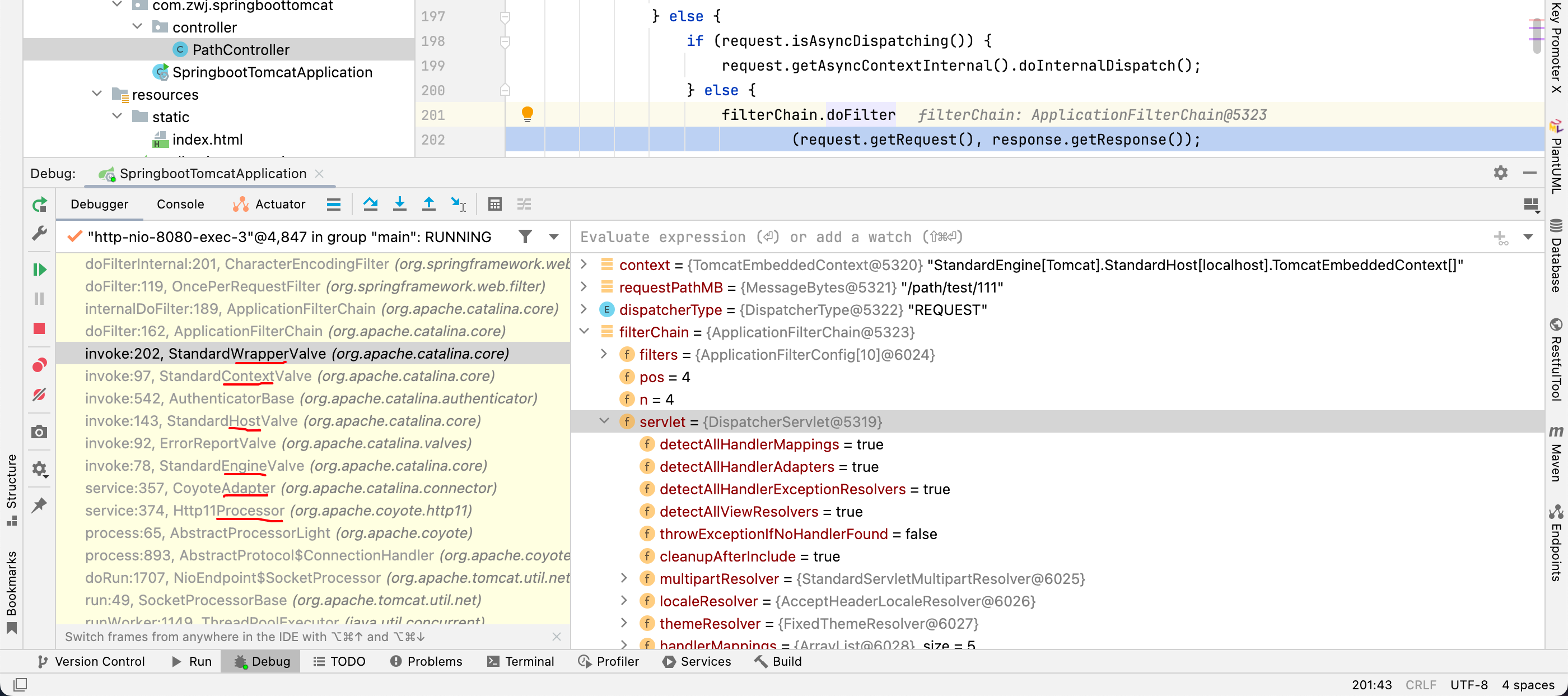
深入拆解TomcatJetty(二)
深入拆解Tomcat&Jetty(二) 专栏地址:https://time.geekbang.org/column/intro/100027701 1、Tomcat支持的IO模型和应用层协议 IO模型: NIO:非阻塞 I/O,采用 Java NIO 类库实现。NIO2:异…...

单元化架构,分布式系统的新王!
0 关键收获 单元化架构通过减少故障的爆炸半径来增加系统弹性单元化架构是那些任何停机时间都被认为是不可接受的,或者可以显著影响最终用户的系统的一个好选择单元化架构通过强制使用固定大小的单元作为部署单元,并倾向于扩展而不是扩展的方法…...

【力扣打卡系列】滑动窗口与双指针(乘积小于K的子数组)
坚持按题型打卡&刷&梳理力扣算法题系列,语言为go,Day6 乘积小于K的子数组 题目描述解题思路 双指针移动,遍历右端点right,滑动左端点left子数组的个数:固定右端点r,子数组的个数其实就是从l到r的元…...

浅谈微前端【qiankun】的应用
一、为什么要使用微前端 微前端的核心理念是将一个大型的单体前端应用拆分成多个独立的小型应用,以便各个应用能够独立开发、部署和更新。这带来了以下几个好处: 独立开发与部署:各个团队可以独立开发自己的子应用,快速上线新功能…...

【JavaEE】——四次挥手,TCP状态转换,滑动窗口,流量控制
阿华代码,不是逆风,就是我疯 你们的点赞收藏是我前进最大的动力!! 希望本文内容能够帮助到你!! 目录 一:断开连接的本质 二:四次挥手 1:FIN 2:过程梳理 …...
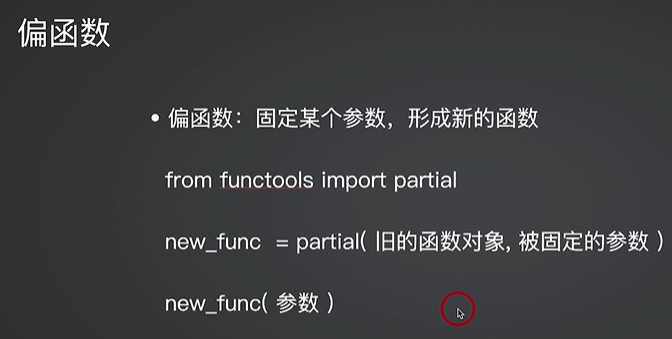
D42【python 接口自动化学习】- python基础之函数
day42 高阶函数 学习日期:20241019 学习目标:函数﹣- 55 高阶函数:函数对象与函数调用的用法区别 学习笔记: 函数对象和函数调用 # 函数对象和函数调用 def foo():print(foo display)# 函数对象 a foo print(a) # &…...
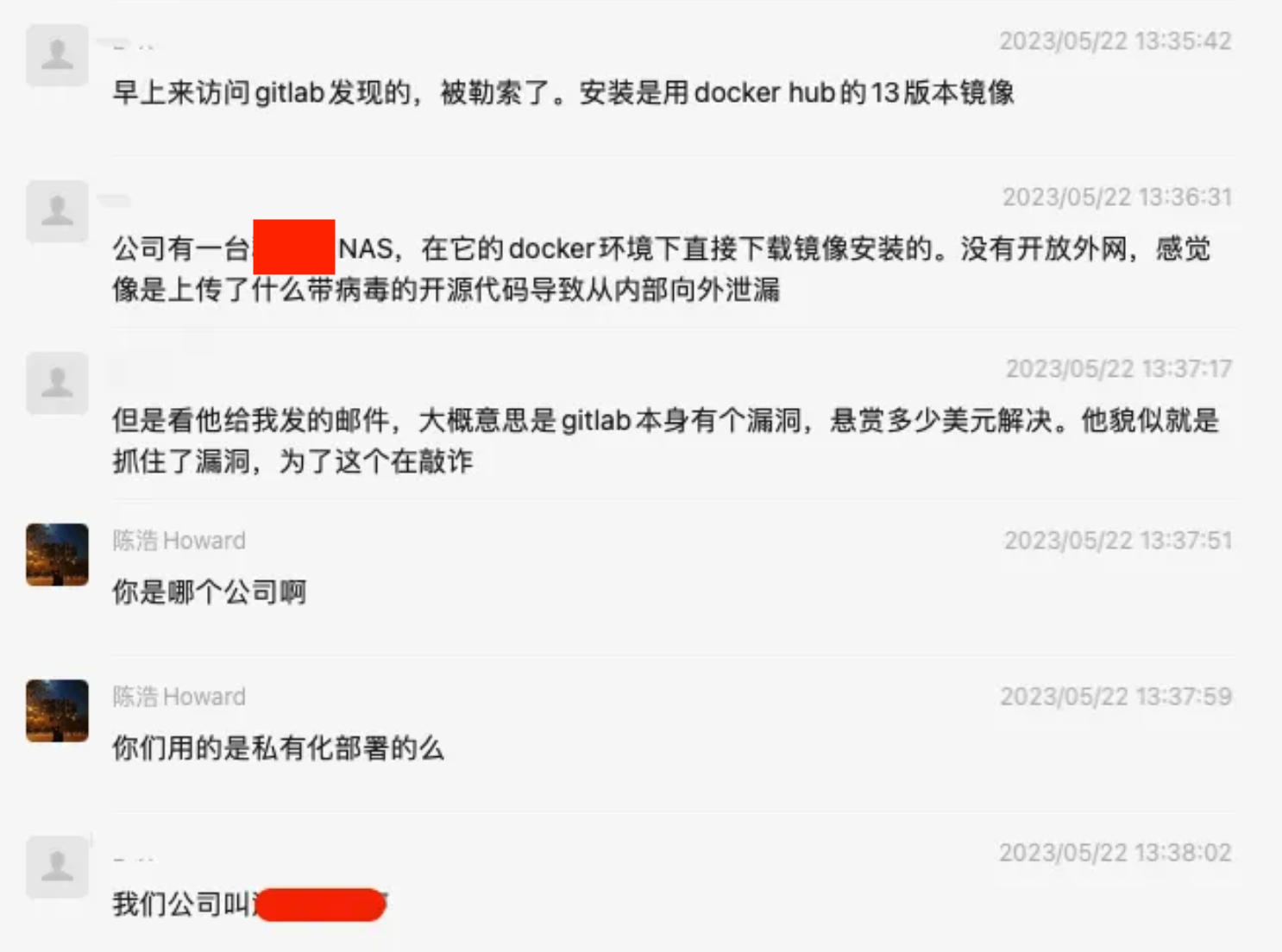
GitLab 老旧版本如何升级?
极狐GitLab 正式对外推出 GitLab 专业升级服务 https://dl.gitlab.cn/cm33bsfv! 专业的技术人员为您的 GitLab 老旧版本实例进行专业升级!服务详情可以在官网查看详细解读! 那些因为老旧版本而被攻击的例子 话不多说,直接上图&a…...

现今 CSS3 最强二维布局系统 Grid 网格布局
深入学习 CSS3 目前最强大的布局系统 Grid 网格布局 Grid 网格布局的基本认识 Grid 网格布局: Grid 布局是一个基于网格的二位布局系统,是目前 CSS 最强的布局系统,它可以同时对列和行进行处理(它将网页划分成一个个网格,可以任…...

【图解版】力扣第146题:LRU缓存
力扣第146题:LRU缓存 一、LRU算法1. 基本概念2. LRU 和 LFU 的区别:3. 为什么 LRU 不需要记录使用频率? 二、Golang代码实现三、代码图解1. LRUCache、DLinkedNode两个结构体2. 初始化结构体对象3. addToHead函数4. removeNode函数5. moveToH…...

数据库知识点整理
DDL DDL-数据库操作 show databases ------------ 查看所有数据库 select database(); ----------查看当前数据库 create database 数据库名;---- 创建数据库 use 数据库名; --------------使用数据库 drop database 数据库名;--…...

【JVM】内存模型
文章目录 内存模型的基本概念案例 程序计数器栈Java虚拟机栈局部变量表栈帧中局部变量表的实际状态栈帧中存放的数据有哪些 操作数栈帧数据 本地方法栈 堆堆空间是如何进行管理的? 方法区静态变量存储 直接内存直接内存的作用 内存模型的基本概念 在前面的学习中,我们知道了字…...

代码随想录:二叉树的四种遍历
144. 二叉树的前序遍历 /*** Definition for a binary tree node.* struct TreeNode {* int val;* TreeNode *left;* TreeNode *right;* TreeNode() : val(0), left(nullptr), right(nullptr) {}* TreeNode(int x) : val(x), left(nullptr), right(nullpt…...

【Linux】从多线程同步到生产者消费者模型:多线程编程实践
目录 1.线程的同步 1.1.为什么需要线程的同步? 2.2.条件变量的接口函数 2.生产消费模型 2.1 什么是生产消费模型 2.2.生产者消费者模型优点 2.3.为何要使用生产者消费者模型 3.基于BlockingQueue的生产者消费者模型 3.1为什么要将if判断变成whileÿ…...
如何在word里面给文字加拼音?
如何在word里面给文字加拼音?在现代社会,阅读已经成为了我们日常生活中不可或缺的一部分。尤其是在学习汉语的过程中,拼音的帮助显得尤为重要。为了帮助大家更好地理解和掌握汉字的发音,许多教师和学生都希望能够在Word文档中为文…...

Detr论文精读
摘要: 作者提到,该方法将物体检测看做直接的集合预测,在传统的目标检测算法中,会先生成候选区域,然后对每个候选区域进行单独的预测(包括物体的分类和预测框的回归),集合预测就是直…...

找寻孤独伤感视频素材的热门资源网站推荐
在抖音上,伤感视频总是能够引起观众的共鸣,很多朋友都在寻找可以下载伤感视频素材的地方。作为一名资深的视频剪辑师,今天我来分享几个提供高清无水印伤感素材的网站,如果你也在苦苦寻找这些素材,不妨看看以下推荐&…...

大模型~合集13
我自己的原文哦~ https://blog.51cto.com/whaosoft/12302606 #TextRCNN、TextCNN、RNN 小小搬运工周末也要学习一下~~虽然和世界没关 但还是地铁上看书吧, 大老勿怪 今天来说一下 文本分类必备经典模型 模型 SOTA!模型资源站收录情况 模型来源论文 RAE ht…...

24小时不间断运行:OpenClaw+Qwen3-32B的稳定性监测报告
24小时不间断运行:OpenClawQwen3-32B的稳定性监测报告 1. 测试背景与实验设计 去年12月,当我第一次在RTX4090D上部署Qwen3-32B模型时,就萌生了一个想法:能否让OpenClaw像人类助手一样持续稳定工作?这个看似简单的需求…...

OpenClaw监控方案:百川2-13B-4bits模型运行状态可视化
OpenClaw监控方案:百川2-13B-4bits模型运行状态可视化 1. 为什么需要监控OpenClaw百川模型组合? 去年冬天的一个深夜,我的OpenClaw自动化任务突然卡死。第二天检查时发现是百川2-13B模型显存溢出导致进程崩溃——这种"事后发现"的…...

自动化内容创作:OpenClaw+Qwen3.5-9B批量处理游记照片生成博客
自动化内容创作:OpenClawQwen3.5-9B批量处理游记照片生成博客 1. 为什么需要自动化内容创作流水线 去年夏天我从西藏旅行回来,手机里存了800多张照片。当我坐在电脑前准备写游记时,面对海量素材突然感到无从下手——每张照片都需要回忆拍摄…...
)
C++信号量实战:如何用Semaphore解决多线程打印ABC问题(附完整代码)
C信号量实战:如何用Semaphore解决多线程打印ABC问题(附完整代码) 多线程编程中,同步机制的选择往往决定了程序的性能和可靠性。信号量(Semaphore)作为一种经典的同步原语,在解决特定类型的问题时…...
)
告别CNN!用Swin-Unet在PyTorch 1.7上搞定医学图像分割(附完整代码与预训练权重)
医学图像分割实战:基于Swin-Unet的高效Transformer解决方案 医学影像分析领域正经历一场从传统卷积神经网络到Transformer架构的范式转变。去年在ECCV会议上亮相的Swin-Unet,作为首个纯Transformer的U型分割网络,在多项医学图像分割任务中超越…...

视频下载重命名全攻略,VS Code 使用 Chrome DevTools MCP 实现浏览器自动化。
视频下载与重命名方法 手动下载 打开浏览器访问课程平台,找到目标视频《计算机网络技术》。点击下载按钮选择保存路径,等待下载完成。右键点击文件选择“重命名”,输入新名称如“人工智能-03-04_20250920_计算机网络技术.mp4”。 Python自动化…...

tmux和screen对比
tmux和screen都是优秀的终端复用器,核心功能相似:在单个终端窗口中创建多个持久化的虚拟终端会话,实现会话保持、窗口分割和多任务管理。 核心对比概括: tmux:设计更现代,功能更强大灵活,配置…...

将软件需求“翻译”成硬件语言:一份让设计团队无法拒绝的黄金文档
该文章同步至公众号OneChan ——如何用硬件工程师的思维,赢得他们的尊重与代码 你提交的不是一份“需求清单”,而是一份“缺陷预防方案”和“效率提升指南”。 引言:一次代价高昂的“翻译失败” 数年前,我参与一个关键IP的开发。…...

Arduino嵌入式Google日历客户端:轻量级流式JSON解析
1. 项目概述 GoogleCalendarClient 是一个面向 Arduino 微控制器平台的轻量级 C 库,专为在资源受限的嵌入式系统中访问 Google Calendar REST API 而设计。其核心目标并非实现完整的 OAuth2 流程或全功能日历管理,而是提供一种 工程上可行、内存可预测…...
✅)
计算机毕业设计:Python城市交通客流预测分析平台 Flask框架 可视化 Requests爬虫 Arima模型 LSTM 深度学习(建议收藏)✅
博主介绍:✌全网粉丝10W,前互联网大厂软件研发、集结硕博英豪成立工作室。专注于计算机相关专业项目实战6年之久,选择我们就是选择放心、选择安心毕业✌ > 🍅想要获取完整文章或者源码,或者代做,拉到文章底部即可与…...