一般无人机和FPV无人机的区别
文章目录
- 一般无人机的工作原理
- 关键组件:
- 一般无人机的应用领域
- 一般无人机的操控体验
- FPV无人机的工作原理
- 关键组件:
- FPV无人机的应用领域
- FPV无人机的操控体验
- 性能特点
- FPV无人机的性能特点
- 未来无人机发展方向和通信方式
- 拓展

一般无人机的工作原理
一般无人机通常配备高分辨率摄像头、GPS模块和自动控制系统,通过遥控器或移动设备APP进行操控。用户可预设飞行路径、定点拍摄,使用自动飞行模式完成复杂任务。

关键组件:
高清摄像头:用于拍摄高质量视频和照片。
GPS模块:提供定位信息,实现自动飞行和悬停。
自动控制系统:包括飞行控制器、传感器等,实现自动稳定和路径规划,受到无人机生产厂家限制。
遥控器/APP:用于操控无人机和实时查看视频。
一般无人机的应用领域
a. 空中摄影与摄像
一般无人机广泛应用于电影、电视、广告等行业的空中摄影,提供稳定、高质量的航拍视频和照片。
b. 农业监测
在农业领域,无人机用于农田监测、病虫害检测、农药喷洒等,提高农业生产效率和精准度。
c. 测绘与地理信息系统
无人机在测绘和地理信息系统中应用广泛,用于地形测绘、资源调查、环境监测等,提供高精度的地理数据。
d. 安防与巡检
无人机在安防和巡检领域也有重要应用,用于边境巡逻、电力线路巡检、石油管道监测等,提高巡检效率和安全性。
一般无人机的操控体验
一般无人机的操控体验更加简便和稳定,用户可以通过遥控器或移动设备APP进行操作,适合初学者和专业用户。
优点:
操作简便:自动化功能和稳定的飞行控制系统,使操作更加简便。
多功能性:支持多种飞行模式和功能,如自动飞行、路径规划、定点悬停等。
适合各种用户:适合从初学者到专业用户的不同需求
缺点:
沉浸感较低:相比FPV无人机,缺乏第一人称视角的沉浸感。
操控灵活性较低:在高难度飞行和快速反应操作上不如FPV无人机。
价格:相对完善的产品自然价格要比FPV高
限制条件:受制于控制系统厂家的限制较多,比如高度,禁航区域,外挂设备拓展能力较低
FPV无人机的工作原理
FPV无人机通过摄像头采集视频信号,并通过无线电或数字信号实时传输到操控者的显示设备,如FPV眼镜或屏幕。操控者通过遥控器进行飞行操作,通过第一人称视角实时监控飞行情况。没有加装GPS,自动巡航,自动返航,自动悬停,完全靠操作手用眼睛和手操作。
关键组件:
FPV摄像头:安装在无人机前部,提供实时视频。
视频传输系统:将摄像头捕捉的视频信号传输到地面设备。
FPV显示设备:FPV眼镜或显示屏,显示视频。
遥控器:操控无人机的飞行方向、速度和高度。
无GPS/传感器,无自动控制系统/路径规划等功能
飞控系统:一般使用通用飞控系统
FPV无人机的应用领域
a. 竞速比赛
FPV无人机竞速是一项高速、刺激的运动,操控者通过第一人称视角进行高速飞行和精确操作。这种比赛需要极高的反应速度和操控技巧。
b. 探索与冒险
FPV无人机可以深入到人类难以到达的地方,如洞穴、森林深处等,进行探索和拍摄,为探险爱好者提供新的视角和体验。
c. 空中摄影
虽然一般无人机在空中摄影方面表现出色,但FPV无人机也可以用于特定场景的动态拍摄,提供独特的视角和画面。
e.特殊冲突区域
普通无人机受制于飞控系统厂家设置,而FPV则可以自定义,在无相关GPS和高度计的情况下自定义限制基本无效
FPV无人机的操控体验
FPV无人机的操控体验高度仿真,操控者通过第一人称视角进行飞行操作,仿佛置身于无人机内部。这种体验不仅增加了飞行的乐趣,也提高了操控的精确性和灵活性。
优点:
高度沉浸:第一人称视角提供了身临其境的飞行体验。
灵活操控:适合高难度飞行和快速反应操作。
即时反馈:实时视频传输提供即时飞行反馈。
飞控系统:可以自定义,可以不设置禁航区域和高度
价格:比普通无人机少了很多配置,甚至可以自行便宜组装,价格低
自定义:可自定义更多功能和外设功能
限制条件:几乎没有受限,如果有那就是玩家本身的技术能力
缺点:
飞控学习曲线陡峭:需要较高的操控技巧和反应速度。
容易眩晕:长时间使用FPV眼镜可能导致眩晕和不适。
自定义技术门槛高:如果需要更多附加功能严重依赖于玩家自身的电子电路和嵌入式水平
性能特点
一般无人机的性能特点
a. 稳定性与自动化
一般无人机设计上强调飞行稳定性和自动化功能,通过GPS和飞行控制系统实现稳定悬停、自动返航和路径规划等功能。
b. 高分辨率摄像
一般无人机通常配备高分辨率摄像头,提供高质量的照片和视频,适合专业摄影和摄像。
c. 长续航时间
一般无人机的电池容量较大,续航时间较长,适合长时间飞行任务,如测绘、巡检等。
FPV无人机的性能特点
a. 高速与灵活
FPV无人机设计上强调高速和灵活性,能够进行高速度的飞行和急转弯,适合竞速比赛和高难度飞行。
b. 低延迟视频传输
FPV无人机的视频传输系统具有低延迟特点,确保操控者能够即时获取飞行画面,做出快速反应。
c. 高度自定义
FPV无人机通常允许用户进行高度自定义和改装,包括摄像头、视频传输系统、电机、控制器等,满足不同需求。
未来无人机发展方向和通信方式
今后光纤制导会成为无人机发展的方向吗?
答案是不会。光纤制导此举更像是一个受现有技术限制,而被逼无柰的做法。根据当前的发展趋势,以及近十年来历次现代化的现状可以预测,未来将是智能化、信息化技术的角逐,减少任务途中人工操作流程,任务途中断开远程操作的媒介完全靠机器智能完成,自然也也就没有所谓的电子信号干扰和遥控拦截了。
无人机更是要向智能化、自动化和无人化发展。除了将无人机作为低端消耗品使用之外,无人机未来可在智能化侦察、查打、定点突破和综合保障上发挥更大作用,其可以潜入危险区域实时收集情报,为行动提供可靠的情报信息;还可以形成无人机集群作战,目的是减少人工操作,减少作业途中信号干扰,提高作战效率;另外,未来还应将实现无人机与人、态势、综合分析、自动化作决策的协同作战作为目标。
拓展
成本200元左右,自制FPV小无人机保姆级教程
https://post.smzdm.com/p/ag8l3lk6/
相关文章:
一般无人机和FPV无人机的区别
文章目录 一般无人机的工作原理关键组件:一般无人机的应用领域一般无人机的操控体验 FPV无人机的工作原理关键组件:FPV无人机的应用领域FPV无人机的操控体验性能特点FPV无人机的性能特点 未来无人机发展方向和通信方式拓展 一般无人机的工作原理 一般无…...

数据结构初阶排序全解
目录 1>>排序前言 2>>插入排序 2.1>>直接插入排序 2.2>>希尔排序 3>>选择排序 3.1>>直接选择排序 3.2>>堆排序 4>>交换排序 4.1冒泡排序 4.2快速排序 5>>归并排序 6>>测试 test.c sort.h sort.c 7…...

MySQL的SQL语句之触发器的创建和应用
触发器 Trigger 一.触发器 作用:当检测到某种数据表发生数据变化时,自动执行操作,保证数据的完整性,保证数据的一致性。 1.创建一个触发器 如上图所示,查看这个create的帮助信息的时候,这个create trig…...
myWebserver 介绍
项目总结 项目准备过程中,主要阅读了《Linux 高性能服务器编程》游双 一书。源码参考的是:TinyWebServer,我在此源码的基础上做了一定的优化和修改。 我的代码:Github: myWebserver: 我的C服务器项目 我的 Webserver 项目总结&…...
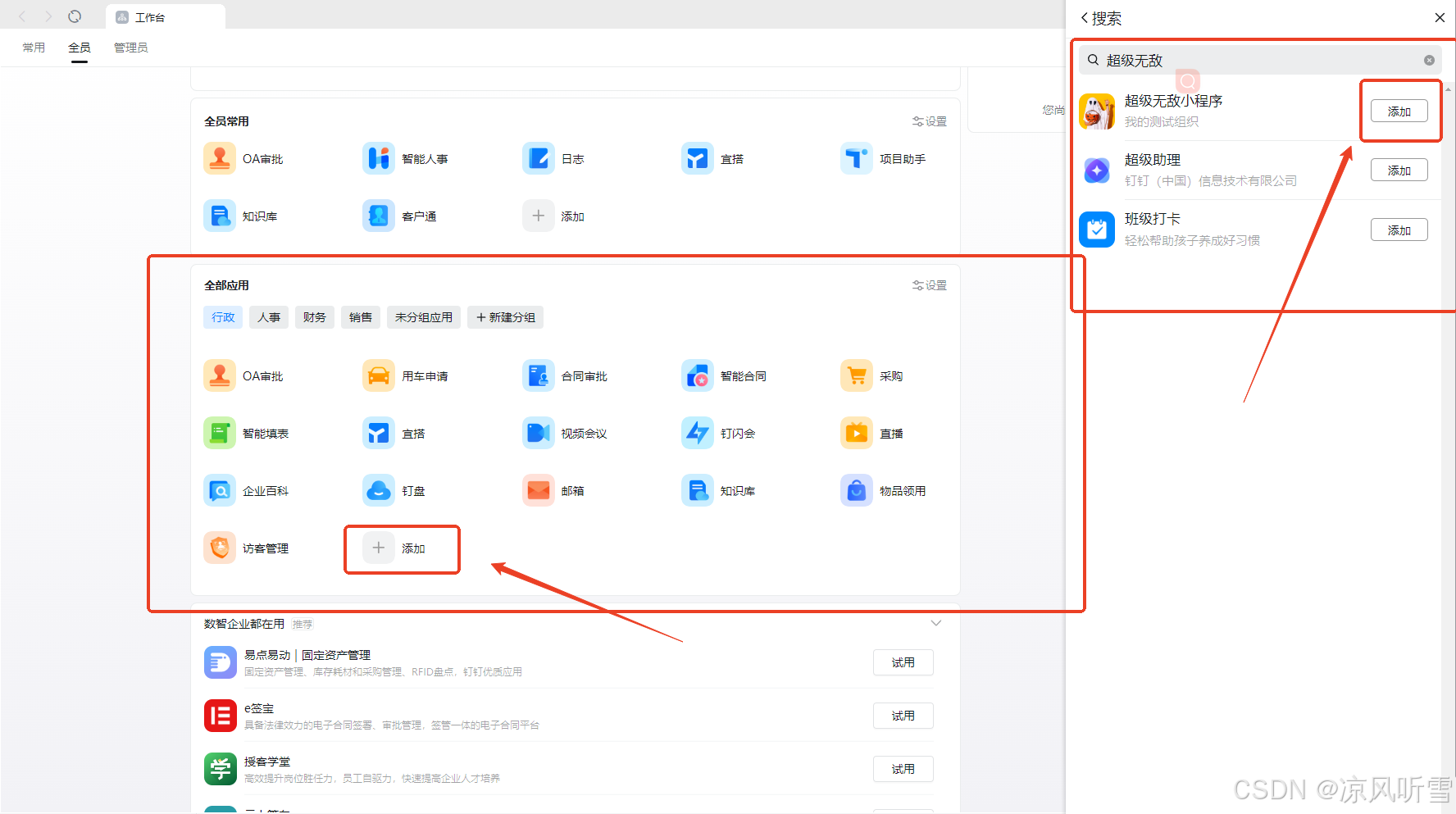
钉钉平台开发小程序
一、下载小程序开发者工具 官网地址:小程序开发工具 - 钉钉开放平台 客户端类型 下载链接 MacOS x64 https://ur.alipay.com/volans-demo_MiniProgramStudio-x64.dmg MacOS arm64 https://ur.alipay.com/volans-demo_MiniProgramStudio-arm64.dmg Windows ht…...

九识智能与徐工汽车达成战略合作,共绘商用车未来新蓝图
近日,九识智能与徐工汽车签署战略合作协议,标志着双方在智能驾驶技术与新能源商用车融合应用、联合生产及市场推广等方面迈入深度合作的新篇章,将共同引领智能驾驶技术商业化浪潮。 近年来,在国家智能化发展战略的引领下ÿ…...
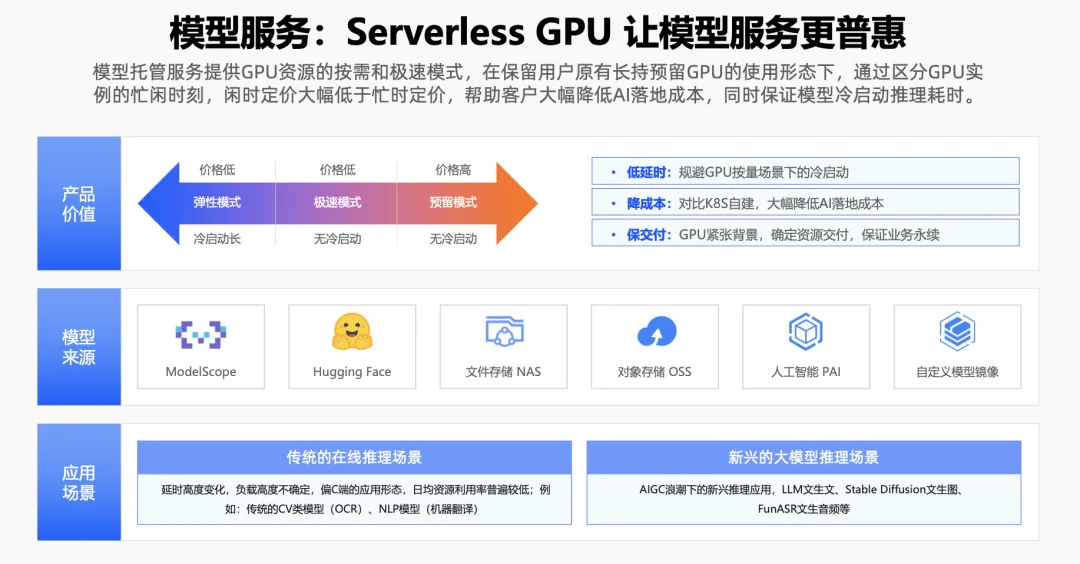
Serverless + AI 让应用开发更简单
本文整理自 2024 云栖大会,阿里云智能高级技术专家,史明伟演讲议题《Serverless AI 让应用开发更简单》 随着云计算和人工智能(AI)技术的飞速发展,企业对于高效、灵活且成本效益高的解决方案的需求日益增长。本文旨在…...

外包功能测试就干了4周,技术退步太明显了。。。。。
先说一下自己的情况,大专生,21年通过校招进入武汉某软件公司,干了差不多3个星期的功能测试,那年国庆,感觉自己不能够在这样下去了,长时间呆在一个舒适的环境会让一个人堕落!而我才在一个外包企业干了4周的功…...

外观模式及运用场景
外观模式(Facade Pattern)是一种结构性设计模式,它为复杂子系统提供一个统一的接口,从而简化与这些子系统的交互。通过外观模式,客户端可以更轻松地使用复杂系统,而不必了解其内部实现。接下来,…...

PyQt5实战——多脚本集合包,UI以及工程布局(二)
个人博客:苏三有春的博客 系列往期: PyQt5实战——多脚本集合包,前言与环境配置(一) 布局 2.1 UI页面布局 整体框架分为分为三个部分,垂直分布。 第一个部分为功能选择按钮(如UTF-8转换&#…...

Python 数据结构对比:列表与数组的选择指南
文章目录 💯前言💯Python中的列表(list)和数组(array)的详细对比1. 数据类型的灵活性2. 性能与效率3. 功能与操作4. 使用场景5. 数据结构选择的考量6. 实际应用案例7. 结论 💯小结 💯…...

gem5运行简单RISC-V全系统模拟
简单记录gem5中运行最简单的RISC-V Full System Simulation的过程 首先是编译RISC-V和m5term,这部分不多写了,官网均有对应教程。 之后直接使用官方在configs/example/gem5_library目录下的riscv-fs.py 运行如下命令 ./build/RISCV/gem5.opt configs/…...

洛谷 P1195 口袋的天空
自用。 题目传送门:口袋的天空 - 洛谷 题解:Inori_333 参考题解:题解 P1195 【口袋的天空】 - 洛谷专栏 /*P1195 口袋的天空https://www.luogu.com.cn/problem/P11952024/11/03 submit:inori333 */#include <iostream> #include &…...

ffmpeg视频滤镜:膨胀操作-dilation
滤镜介绍 dilation 官网链接 > FFmpeg Filters Documentation 膨胀滤镜会使图片变的更亮,会让细节别的更明显。膨胀也是形态学中的一种操作,在opencv中也有响应的算子。此外膨胀结合此前腐蚀操作,可以构成开闭操作。 开操作是先腐蚀…...

3.3 windows,ReactOS系统中页面的换出----2,结构体PHYSICAL_PAGE
系列文章目录 提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加 例如:第一章 Python 机器学习入门之pandas的使用 提示:写完文章后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目…...
lvgl
lvgl 目录 lvgl Lvgl移植到STM32 -- 1、下载LVGL源码 -- 2、将必要文件复制到工程目录 -- 3、修改配置文件 将lvgl与底层屏幕结合到一块 -- lvgl也需要有定时器,专门给自己做了一个函数,告诉lvgl经过了多长时间(ms(毫秒)级别) 编写代码 lvgl的中文教程手册网站…...

【django】RESTful API 设计指南
目录 一、协议 二、域名 三、版本(Versioning) 四、路径(Endpoint) 五、HTTP动词 5.1 CRUD操作: 5.2 其他动词: 六、过滤信息(Filtering) 七、状态码(Status Co…...

提升大数据量分页查询性能:深分页优化全解
前言 在处理数据量逐渐增大的数据库表时,优化查询性能是一个常见的挑战。朋友们可能会建议说,创建索引不就能解决问题了吗?然而,当数据量达到相当规模时,简单的索引可能不足以应对所有情况。这时,可能会有…...

WPF 实现冒泡排序可视化
WPF 实现冒泡排序可视化 实现冒泡排序代码就不过多讲解,主要是实现动画效果思路,本demo使用MVVM模式编写,读者可自行参考部分核心代码,即可实现如视频所示效果。 对于新手了解算法相关知识应该有些许帮助,至于其它类型…...

Claude 3.5 新功能 支持对 100 页的PDF 图像、图表和图形进行可视化分析
Claude 3.5 Sonnet发布PDF图像预览新功能,允许用户分析长度不超过100页的PDF中的视觉内容。 此功能使用户能够轻松上传文档并提取信息,特别适用于包含图表、图形和其他视觉元素的研究论文和技术文档。 视觉PDF分析:用户现在可以从包含各种视觉…...

探索Mod Assistant:Beat Saber模组管理工具的高效解决方案
探索Mod Assistant:Beat Saber模组管理工具的高效解决方案 【免费下载链接】ModAssistant Simple Beat Saber Mod Installer 项目地址: https://gitcode.com/gh_mirrors/mo/ModAssistant Beat Saber模组管理工具Mod Assistant是一款专为PC版Beat Saber设计的…...

为什么你的旁遮普语语音听起来像“机械诵经”?ElevenLabs隐藏参数`stability=0.35`+`similarity_boost=0.72`调优公式首次披露
更多请点击: https://intelliparadigm.com 第一章:旁遮普语语音合成的“机械诵经”现象本质 当旁遮普语(Gurmukhi script)文本被输入主流TTS系统时,常出现一种高度重复、节奏僵硬、缺乏韵律起伏的输出效果——业内戏称…...

书成紫微动,律定凤凰驯:海棠山铁哥的道,从来不是嘴上说的,是写在作品里的
文坛从不缺大道理,也不缺高谈阔论的传道者,历来最缺的,是知行合一、落地成真的真大道。一、乱象:言道者多,行道者少口头标榜实际行径文脉传承随波逐流初心坚守妥协功利拒绝流量收割热度敬畏真诚唯数据论 语言可以伪装人…...

Outfit字体技术实现:9种字重的几何无衬线字体架构设计与应用实践
Outfit字体技术实现:9种字重的几何无衬线字体架构设计与应用实践 【免费下载链接】Outfit-Fonts The most on-brand typeface 项目地址: https://gitcode.com/gh_mirrors/ou/Outfit-Fonts 在现代数字产品设计中,字体选择往往决定了界面的视觉层次…...
)
告别SD卡!用Ubuntu主机给Jetson Orin Nano刷机,保姆级避坑指南(SDK Manager篇)
告别SD卡!用Ubuntu主机给Jetson Orin Nano刷机,保姆级避坑指南(SDK Manager篇) 当第一次拿到Jetson Orin Nano Developer Kit时,很多开发者会本能地选择SD卡刷机方案——毕竟这是最"傻瓜式"的操作。但经历过…...
)
Mac小白必看:手把手教你用终端命令重建丢失的Recovery HD分区(附详细路径解释)
Mac用户自救指南:彻底掌握Recovery HD分区修复全流程 当你发现CommandR组合键失效时,那种无助感我深有体会。去年帮朋友修复一台二手MacBook时,我们花了整整一个下午才搞明白为什么恢复模式无法启动——原来前主人为了腾出空间删除了Recovery…...

14502黄大年茶思屋145期难题 第二题 QLC盘多namespace并发备电量优化问题 标准化解题框架
总标题:黄大年茶思屋145期难题第二题 AI无偏差版脱敏题目标准化解题详细写作框架 子标题:QLC盘多namespace并发备电量优化问题 标准化解题框架 摘要 本文严格遵循AI无偏差脱敏标准化写作范式,完整复刻本期第二道脱敏原题全文,逐项…...

GetQzonehistory终极指南:三步快速备份QQ空间全部历史说说
GetQzonehistory终极指南:三步快速备份QQ空间全部历史说说 【免费下载链接】GetQzonehistory 获取QQ空间发布的历史说说 项目地址: https://gitcode.com/GitHub_Trending/ge/GetQzonehistory 在数字记忆时代,QQ空间承载了无数用户的青春回忆和成长…...

为什么你的ElevenLabs免费额度突然归零?4个未公开的触发条件,第2条99%人中招!
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs免费额度突然归零的真相揭秘 近期大量开发者反馈 ElevenLabs 的免费 API 额度(10,000 characters/month)在未达用量上限时被强制重置为 0,且控制台不显示…...

学校AIGC检测标准差异解读:不同高校AI率标准对比2026年如何针对性免费处理完整指南
学校AIGC检测标准差异解读:不同高校AI率标准对比2026年如何针对性免费处理完整指南 同一段文字,不同平台检测AI率相差20%以上。这不是玄学,有原因可解释。 关于高校AIGC检测标准差异解读,理解了背后逻辑,很多「奇怪现…...