基于stm32的多旋翼无人机(Multi-rotor UAV based on stm32)
在现代无人机技术中,多旋翼无人机因其稳定性和操控性而受到广泛应用。STM32微控制器因其强大的处理能力和丰富的外设接口,成为实现多旋翼无人机控制的理想选择。本文将详细介绍如何基于STM32实现多旋翼无人机的控制,包括硬件设计、软件设计和控制算法。
1. 硬件设计
多旋翼无人机的硬件设计包括以下几个关键部分:
- 微控制器:选择STM32系列微控制器,考虑其处理能力、内存大小、外设接口等因素。
- 电源电路:设计电源电路,包括电池、稳压器、电源监控等。
- 传感器集成:集成IMU(惯性测量单元)、气压计、GPS等传感器,并设计合适的接口电路。
- 电机驱动电路:设计电机驱动电路,确保电机稳定运行。
2. 软件设计
软件设计涉及以下几个方面:
- Bootloader:编写Bootloader以支持固件的升级。
- 传感器驱动:开发传感器的驱动程序,实现数据的采集。
- 数据处理:实现数据融合算法,如卡尔曼滤波,以提高传感器数据的准确性。
- 控制算法:实现PID控制算法,用于无人机的姿态控制。
- 通信协议:实现Mavlink或其他通信协议,用于数据传输。
- 用户接口:设计遥控器或地面站的接口,用于控制和监控无人机。
3. 控制算法
3.1 姿态控制
使用PID算法控制无人机的俯仰、横滚和偏航。以下是姿态控制的简化代码示例:
// PID控制结构体
typedef struct {float Kp;float Ki;float Kd;float integral;float prev_error;
} PID;// PID控制函数
void PID_Compute(PID *pid, float setpoint, float measured_value) {float error = setpoint - measured_value;pid->integral += error;float derivative = error - pid->prev_error;float output = pid->Kp * error + pid->Ki * pid->integral + pid->Kd * derivative;// 饱和输出if (output > MAX_OUTPUT) output = MAX_OUTPUT;else if (output < -MAX_OUTPUT) output = -MAX_OUTPUT;pid->prev_error = error;// 应用控制输出到电机control_motors(output);
}
3.2 角速度控制
角速度控制是姿态控制的下一个环节,它将姿态控制的输出转换为电机的控制信号。以下是角速度控制的简化代码示例:
void attitudeRatePID(Axis3f *actualRate, attitude_t *desiredRate, control_t *output) {// 角速度环 PIDoutput->roll = pidOutLimit(pidUpdate(&pidRateRoll, desiredRate->roll - actualRate->x));output->pitch = pidOutLimit(pidUpdate(&pidRatePitch, desiredRate->pitch - actualRate->y));output->yaw = pidOutLimit(pidUpdate(&pidRateYaw, desiredRate->yaw - actualRate->z));
}
3.3 姿态控制量和油门值整合
整合姿态控制量和油门值,以控制电机的转速。以下是整合控制的简化代码示例:
void powerControl(control_t *control) {s16 r = control->roll / 2.0f;s16 p = control->pitch / 2.0f;motorPWM.m1 = limitThrust(control->thrust - r - p + control->yaw);motorPWM.m2 = limitThrust(control->thrust - r + p - control->yaw);motorPWM.m3 = limitThrust(control->thrust + r + p + control->yaw);motorPWM.m4 = limitThrust(control->thrust + r - p - control->yaw);if (motorSetEnable) {motorPWM = motorPWMSet;}motorsSetRatio(MOTOR_M1, motorPWM.m1);motorsSetRatio(MOTOR_M2, motorPWM.m2);motorsSetRatio(MOTOR_M3, motorPWM.m3);motorsSetRatio(MOTOR_M4, motorPWM.m4);
}
4. 注意事项
- 传感器校准:确保所有传感器都经过精确校准,以提供准确的数据。
- 控制参数调整:PID参数需要根据实际飞行情况进行调整,以达到最佳的控制效果。
- 电源管理:合理设计电源电路,确保无人机在飞行过程中电源稳定。
通过上述步骤,我们可以基于STM32实现多旋翼无人机的控制,包括姿态控制、角速度控制和电机控制。这为开发高性能无人机提供了坚实的基础。
✅作者简介:热爱科研的嵌入式开发者,修心和技术同步精进
❤欢迎关注我的知乎:对error视而不见
代码获取、问题探讨及文章转载可私信。
☁ 愿你的生命中有够多的云翳,来造就一个美丽的黄昏。
🍎获取更多嵌入式资料可点击链接进群领取,谢谢支持!👇
点击领取更多详细资料
相关文章:
)
基于stm32的多旋翼无人机(Multi-rotor UAV based on stm32)
在现代无人机技术中,多旋翼无人机因其稳定性和操控性而受到广泛应用。STM32微控制器因其强大的处理能力和丰富的外设接口,成为实现多旋翼无人机控制的理想选择。本文将详细介绍如何基于STM32实现多旋翼无人机的控制,包括硬件设计、软件设计和…...

第二十四章 v-model原理及v-model简化表单类组件封装
目录 一、v-model 原理 二、表单类组件封装 三、v-model简化组件封装代码 一、v-model 原理 原理:v-model本质上是一个语法糖。例如应用在输入框上,就是 value属性 和 input事件 的合写。 作用:提供数据的双向绑定 ① 数据变&#x…...
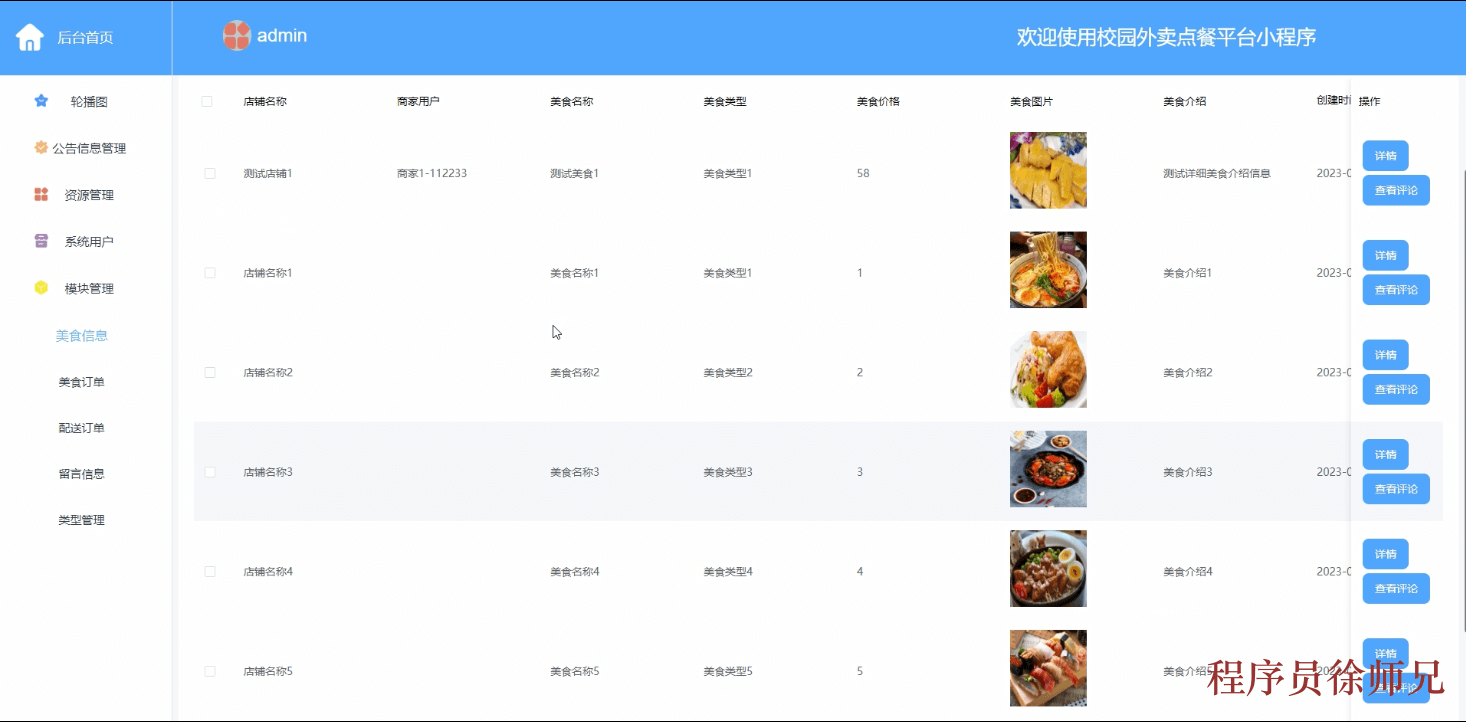
Java基于SpringBoot 的校园外卖点餐平台微信小程序(附源码,文档)
大家好,我是Java徐师兄,今天为大家带来的是Java基于SpringBoot 的校园外卖点餐平台微信小程序。该系统采用 Java 语言 开发,MySql 作为数据库,系统功能完善 ,实用性强 ,可供大学生实战项目参考使用。 博主介…...

细说STM32单片机USART中断收发RTC实时时间并改善其鲁棒性的方法
目录 一、工程目的 1、 目标 2、通讯协议及应对错误指令的处理目标 二、工程设置 三、程序改进 四、下载与调试 1、合规的指令 2、 proBuffer[0]不是# 3、proBuffer[4]不是; 4、指令长度小于5 5、指令长度大于5 6、proBuffer[2]或proBuffer[3]不是数字 7、;位于p…...

无人机场景 - 目标检测数据集 - 夜间车辆检测数据集下载「包含VOC、COCO、YOLO三种格式」
数据集介绍:无人机场景夜间车辆检测数据集,真实场景高质量图片数据,涉及场景丰富,比如夜间无人机场景城市道路行驶车辆图片、夜间无人机场景城市道边停车车辆图片、夜间无人机场景停车场车辆图片、夜间无人机场景小区车辆图片、夜…...

Dubbo 构建高效分布式服务架构
一、引言 随着软件系统的复杂性不断增加,传统的单体架构已经难以满足大规模业务的需求。分布式系统架构通过将系统拆分成多个独立的服务,实现了更好的可扩展性、可维护性和高可用性。在分布式系统中,服务之间的通信和协调是一个关键问题&…...
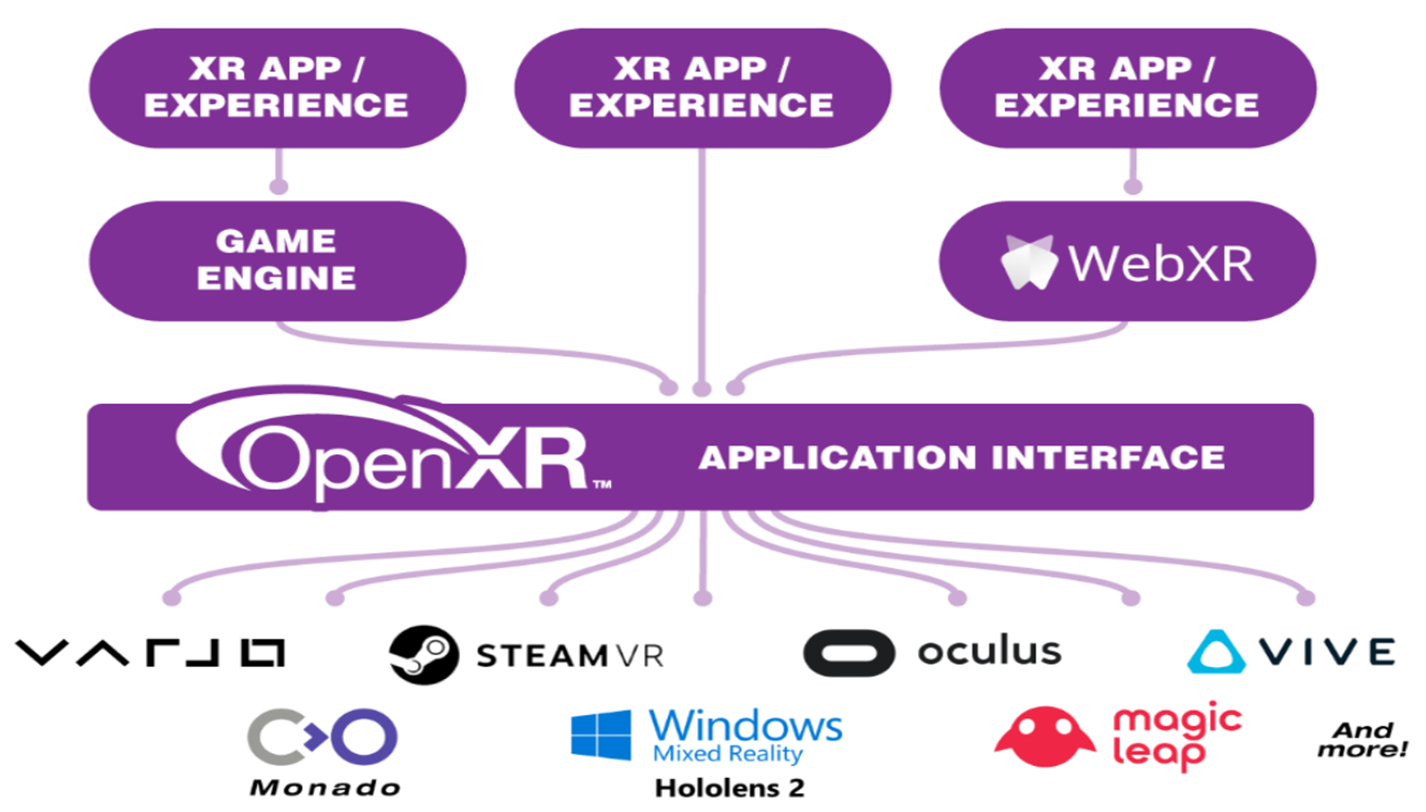
Unity XR Interaction Toolkit 开发教程(1):OpenXR 与 XRI 概述【3.0 以上版本】
文章目录 📕Unity XR 开发架构🔍底层插件(对接硬件)🔍高层 SDK(面向应用交互层) 📕OpenXR📕XR Interaction Toolkit🔍特点🔍XRI 能够实现的交互类…...

自扶正救生艇,保障水上救援的安全卫士_鼎跃安全
在应急事件中,自扶正救生艇能够发挥关键的救援和保障作用,确保救援人员和被困人员的生命安全,尤其在极端天气或突发水上事故中展现出明显优势。 在救援过程中如果遭遇翻船,救生艇能够迅速恢复正常姿态,确保救援人员不会…...

《Qwen2-VL》论文精读【下】:发表于2024年10月 Qwen2-VL 迅速崛起 | 性能与GPT-4o和Claude3.5相当
1 前言 《Qwen2-VL》论文精读【上】:发表于2024年10月 Qwen2-VL 迅速崛起 | 性能与GPT-4o和Claude3.5相当 上回详细分析了Qwen2-VL的论文摘要、引言、实验,下面继续精读Qwen2-VL的方法部分。 文章目录 1 前言2 方法2.1 Model Architecture2.2 改进措施2…...

WebSocket消息帧的组成结构
WebSocket消息帧是WebSocket协议中的一个基本单位,它定义了数据在客户端和服务器之间传递的格式。每个数据帧包含了不同类型的数据和各种控制信息。以下是WebSocket消息帧的组成结构: WebSocket 帧结构 FIN、RSV1、RSV2、RSV3 和 opcode(第一…...

如何利用低代码开源框架实现高效开发?
随着数字化转型步伐的加快,越来越多的企业开始关注提高软件开发效率的方法。低代码平台因其能够大幅减少编码量而受到欢迎,而开源框架则因其灵活性和社区支持成为开发者的首选。如何利用低代码开源框架实现高效开发,成为许多企业和开发者面临…...

使用 RabbitMQ 有什么好处?
大家好,我是锋哥。今天分享关于【使用 RabbitMQ 有什么好处?】面试题。希望对大家有帮助; 使用 RabbitMQ 有什么好处? 1000道 互联网大厂Java工程师 精选面试题-Java资源分享网 RabbitMQ 是一种流行的开源消息代理,广…...

机器学习周报(RNN的梯度消失和LSTM缓解梯度消失公式推导)
文章目录 摘要Abstract 1 RNN的梯度消失问题2 LSTM缓解梯度消失总结 摘要 在深度学习领域,循环神经网络(Recurrent Neural Network, RNN)被广泛应用于处理序列数据,特别是在自然语言处理、时间序列预测等任务中。然而,…...

一篇文章理解前端中的 File 和 Blob
概述: js处理文件、二进制数据和数据转换的时候,提供了一些API和对象,例如:File、Blob、FileReader、ArraryBuffer、Base64、Object URL 和 DataURL。现在主要介绍File和Blob这两个对象。 1.Blob介绍 在js中,Blob&am…...

串口屏控制的自动滑轨(未完工)
序言 疫情期间自己制作了一个自动滑轨,基于无线遥控的,但是整体太大了,非常不方便携带,所以重新设计了一个新的,以2020铝型材做导轨的滑轨,目前2020做滑轨已经很成熟了,配件也都非常便宜&#x…...

DFA算法实现敏感词过滤
DFA算法实现敏感词过滤 需求:检测一段文本中是否含有敏感词。 比如检测一段文本中是否含有:“滚蛋”,“滚蛋吧你”,“有病”, 可使用的方法有: 遍历敏感词,判断文本中是否含有这个敏感词。 …...

Python自动化运维:技能掌握与快速入门指南
#编程小白如何成为大神?大学生的最佳入门攻略# 在当今快速发展的IT行业中,Python自动化运维已经成为了一个不可或缺的技能。本文将为您详细介绍Python自动化运维所需的技能,并提供快速入门的资源,帮助您迅速掌握这一领域。 必备…...

在linux系统中安装pygtftk软件
1.下载和安装 网址: https://dputhier.github.io/pygtftk/index.html ## 手动安装 git clone http://gitgithub.com:dputhier/pygtftk.git pygtftk cd pygtftk # Check your Python version (>3.8,<3.9) pip install -r requirements.txt python setup.py in…...

decodeURIComponentSafe转义%问题记录URI malformed
decodeURIComponentSafe转义%问题记录 问题背景 当我们解析包涵 % 字符的字符串时,会出现错误如下 Uncaught URIError: URI malformed 解决方案: function decodeURIComponentSafe(s) {if (!s) {return s;}return decodeURIComponent(s.replace(/%(?…...

自由学习记录(18)
动画事件的碰撞器触发 Physics 类的常用方法 RaycastHit hit; if (Physics.Raycast(origin, direction, out hit, maxDistance)) {Debug.Log("Hit: " hit.collider.name); } Physics.Raycast:从指定点向某个方向发射射线,检测是否与碰撞体…...

联想刃7000k BIOS深度解锁技术实现与性能优化指南
联想刃7000k BIOS深度解锁技术实现与性能优化指南 【免费下载链接】Lenovo-7000k-Unlock-BIOS Lenovo联想刃7000k2021-3060版解锁BIOS隐藏选项并提升为Admin权限 项目地址: https://gitcode.com/gh_mirrors/le/Lenovo-7000k-Unlock-BIOS 联想刃7000k作为一款高性能游戏主…...

怎样快速恢复损坏视频:3步实用MP4修复方案
怎样快速恢复损坏视频:3步实用MP4修复方案 【免费下载链接】untrunc Restore a truncated mp4/mov. Improved version of ponchio/untrunc 项目地址: https://gitcode.com/gh_mirrors/un/untrunc 你是否经历过相机突然断电导致视频文件损坏?或者传…...

计算机光标自动化控制:从模拟点击到智能交互的技术实现与应用
1. 项目概述与核心价值最近在GitHub上看到一个挺有意思的项目,叫“Computer-cursor-tech-support”。初看这个标题,你可能会有点摸不着头脑:电脑光标和技术支持,这两者是怎么联系到一起的?是开发了一个新的光标样式&am…...

基于Puppeteer与GPT的微信AI助手:从自动化到智能回复的完整实现
1. 项目概述:一个能帮你自动回复微信消息的AI助手 如果你也和我一样,每天被淹没在微信的群聊、私聊和各种公众号消息里,但又不想错过重要信息,或者希望有一个“智能分身”能帮你处理一些重复性的咨询,那么这个项目你一…...

除了 Docker 还能用什么?一文看懂容器技术的“四大门派”
除了 Docker 还能用什么?一文看懂容器技术的“四大门派” 在云原生时代,Docker 几乎成了容器的代名词。但实际上,容器技术是一片茂密的森林,除了 Docker,还有许多针对特定痛点(如安全、性能、隔离性&#x…...

2026年5月AI Agent技术全景:多模态与自主决策的范式跃迁
核心结论:2026年5月,AI Agent技术正在从"工具调用"向"自主决策"跃迁。六大趋势——多模态感知、长期记忆、多Agent协作、安全对齐、开发者生态、边缘部署——正在重塑Agent技术栈。12大主流框架(LangGraph、AutoGPT、Met…...

别再手动画UML了!用IDEA Diagrams插件自动生成类关系图,附赠符号含义速查表
高效架构可视化:IDEA Diagrams插件全指南与UML符号解析 在软件开发过程中,清晰的架构设计是团队协作和代码维护的基石。传统的手绘UML类图不仅耗时费力,更难以与快速迭代的代码保持同步。JetBrains IDEA内置的Diagrams插件正是为解决这一痛点…...

从自动化到智能代理:构建家庭智能中枢的架构与实践
1. 项目概述与核心价值最近在折腾智能家居和自动化流程,发现市面上的很多方案要么太“重”,需要依赖特定品牌的生态闭环;要么太“散”,各种工具和脚本堆在一起,管理起来一团乱麻。直到我遇到了一个名为“Home-agent-as…...
)
手把手教你用Zynq-7100 FPGA实现100Mbps OOK信号定时同步(含完整Verilog代码)
基于Zynq-7100的OOK信号定时同步实战:从算法到FPGA实现全解析 在无线通信系统中,定时同步是数字接收机设计中最关键的环节之一。当我们需要在Xilinx Zynq-7100 FPGA平台上实现100Mbps OOK信号的接收处理时,面临的最大挑战是如何在仅有50MHz外…...

NotebookLM智能体插件:AI驱动的自动化知识处理与任务执行
1. 项目概述:当NotebookLM遇上智能体,知识处理的范式革命最近在AI圈子里,一个名为“notebooklm-agent-plugin”的项目引起了我的注意。乍一看,这个名字结合了Google的NotebookLM和当下火热的“智能体”(Agentÿ…...