编译安装并刷写高通智能机器人SDK
The Qualcomm Intelligent Robotics Product SDK (QIRP SDK) 高通智能机器SDK基于ROS2进行开发,此SDK适用于高通linux发行版本,QIRPSDK中提供以下内容:
ROS 包中用于支持机器人应用程序开发的参考代码
- 用于评估机器人平台的端到端场景示例
- 集成交叉编译工具链,包括常见的编译工具,例如 aarch64-oe-linux-gcc、make、cmake 和 ROS 核心
- 集成开发的工具和脚本
QIRP SDK整体架构如下图所示:

Qualcomm® Intelligent Multimedia SDK (IM SDK) :提供用于优化应用开发的 Qualcomm 硬件加速插件。
Qualcomm® Intelligent Robotics Function SDK: 为 Qualcomm 机器人平台提供机器人功能 ROS 节点。该 SDK 基于 ROS2,这是一个开源的操作系统。
Qualcomm® AI Engine Direct SDK: 为 Qualcomm 芯片组和 AI 加速核心上的 AI/ML 用例提供软件架构。它提供了一个统一的 API,具有模块化和可扩展的单独加速器库,形成了全栈 AI 解决方案的可重用基础。它支持 runtime,如 Qualcomm Neural Processing SDK 和 TensorFlow Lite AI Engine Direct Delegate。
编译和安装QIRPSDK
前提条件:需要Ubunt22.04的主机和至少50GB的磁盘空间
Ubuntu 主机需要进行一些配置操作,确保所需的软件工具已安装和配置,可以使用。
1.安装以下软件包,准备好运行 Yocto 版本所需的主机环境
sudo apt update
sudo apt install gawk wget git diffstat unzip texinfo gcc build-essential \
chrpath socat cpio python3 python3-pip python3-pexpect xz-utils \
debianutils iputils-ping python3-git python3-jinja2 libegl1-mesa \
libsdl1.2-dev pylint xterm python3-subunit mesa-common-dev zstd \
liblz4-tool locales tar python-is-python3 file libxml-opml-simplegen-perl \
vim whiptail
2.设置语言环境:
sudo locale-gen en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LC_ALL=en_US.UTF-8
export LANG=en_US.UTF-8
3更新 git 配置:
# Check if your identity is configured in. gitconfig
git config --get user.email
git config --get user.name
# Run the following commands if you do not have your account identity set in .gitconfig
git config --global user.email <Your email ID>
git config --global user.name <"Your Name">
# Add the following UI color option for output of console (optional)
git config --global color.ui auto
# Add the following git configurations to fetch large size repositories and to avoid unreliable connections
git config --global http.postBuffer 1048576000
git config --global http.maxRequestBuffer 1048576000
git config --global http.lowSpeedLimit 0
git config --global http.lowSpeedTime 999999
编译基础镜像
1.设置repo
mkdir -p ~/bin
cd ~/bin
#Note if you already have a previous directory of repo_tool, you can delete it
rm -rf ~/bin/repo_tool
git clone https://android.googlesource.com/tools/repo.git -b v2.41 repo_tool
cd repo_tool
git checkout -b v2.41
export PATH=~/bin/repo_tool:$PATH
如果您所在的区域阻止了对 android.googlesource 的访问,请尝试以下配置以从 Codelinaro 镜像获取存储库
git config --global url.https://git.codelinaro.org/clo/la/tools/repo.insteadOf https://android.googlesource.com/tools/repo
如果上述方法不起作用,也可以尝试用命令行安装repo
sudo apt install curl
mkdir -p ~/bin
curl https://raw.githubusercontent.com/GerritCodeReview/git-repo/v2.41/repo -o ~/bin/repo && chmod +x ~/bin/repo
export PATH=~/bin:$PATH
注意:最新的repo只支持python3
2.下载 Qualcomm Yocto 和支持层:
mkdir <workspace>
cd <workspace>
repo init -u https://github.com/quic-yocto/qcom-manifest -b qcom-linux-kirkstone -m <robotics-release-manifest>
repo sync -c -j8
有关最新版的<robotics-release-manifest>请参考Qualcomm Documentation
举例:
这里采用‘qcom-6.6.28-QLI.1.1-Ver.1.1_robotics-product-sdk-1.1’版本
repo init -u https://github.com/quic-yocto/qcom-manifest -b qcom-linux-kirkstone -m qcom-6.6.28-QLI.1.1-Ver.1.1_robotics-product-sdk-1.1.xml
repo sync -c -j8
下载完后检查layer文件夹下这些层是否存在
meta-qcom
meta-qcom-hwe
meta-qcom-distro
meta-ros
meta-qcom-robotics
meta-qcom-robotics-distro
meta-qcom-robotics-sdk
meta-qcom-qim-product-sdk
meta-qcom-qim-product-sdk
3.设置编译环境:
cd <workspace>
MACHINE=qcm6490 DISTRO=qcom-robotics-ros2-humble source setup-robotics-environment
4编译机器人镜像和 QIRP SDK 组件
../qirp-build qcom-robotics-full-image
编译过程中可能会出现网络错误导致fetch error,多尝试几次即可。
编译完成后可查看以下文件是否存在
QIRP SDK artifacts: <workspace>/build-qcom-robotics-ros2-humble/tmpglibc/deploy/qirpsdk_artifacts/qirp-sdk_<version>.tar.gz
Robotics image:<workspace>/build-qcom-robotics-ros2-humble/tmpglibc/deploy/images/qcm6490/qcom-robotics-full-image
刷写镜像(需要RB3Gen2设备)
确保在 Linux 主机上配置了 Qualcomm 制造供应商 ID 05c6 的 udev USB 规则
1.导航到 udev USB 规则目录
cd /etc/udev/rules.d
ls
如果 51-qcom-usb.rules 文件不存在,使用 sudo vi 51-qcom-usb.rules 创建该文件并将以下内容添加到文件中:
SUBSYSTEMS=="usb", ATTRS{idVendor}=="05c6", ATTRS{idProduct}=="9008", MODE="0666", GROUP="plugdev"
重新启动udev
sudo systemctl restart udev
2.将设备进入EDL模式
adb shell reboot edl
3.验证设备是否已进入 QDL 模式
lsusb
输出以下内容表示成功进入QDL
Bus 002 Device 014: ID 05c6:9008 Qualcomm, Inc. Gobi Wireless Modem (QDL mode)
4.确保ModemManager 未在运行
有些 Linux 发行版本随附 ModemManager,即一款用于配置移动宽带的工具。当设备以 USB 模式连接时,它会被识别为 Qualcomm Modem,ModemManager 会尝试配置该设备。由于这会干扰 QDL 刷写,因此您必须在连接设备之前禁用 ModemManager。如果使用的 Linux 发行版本带有 systemd,则可使用以下命令停止 ModemManager:
sudo systemctl stop ModemManager
如果您需要 ModemManager,则可在刷写完成后再次启动它。
5. 导航到工作区中的以下位置可找到 QDL 工具并刷写镜像
# cd <workspace_path>/build-qcom-wayland/tmp-glibc/deploy/images/<MACHINE>/<IMAGE>
# build_path: For DISTRO=qcom-wayland, it is build-qcom-wayland.
# For DISTRO=qcom-robotics-ros2-humble, it is build-qcom-robotics-ros2-humble
# qdl <prog.mbn> [<program> <patch> ...]
# Example: build_path is build-qcom-wayland
cd <workspace_path>/build-qcom-wayland/tmp-glibc/deploy/images/qcm6490/qcom-multimedia-image
./qdl prog_firehose_ddr.elf rawprogram*.xml patch*.xml
如果您在终端窗口上看到 partition 1 is now bootable(如以下消息所示),则表示刷写成功
LOG: INFO: Calling handler for setbootablestoragedrive
LOG: INFO: Using scheme of value = 1
partition 1 is now bootable
LOG: INFO: Calling handler for power
LOG: INFO: Will issue reset/power off 100 useconds, if this hangs check if watchdog is enabled
LOG: INFO: bsp_target_reset() 1
刷写操作成功后,运行 lsusb 命令以在终端窗口上查看设备信息:
Bus 002 Device 006: ID 05c6:901d Qualcomm, Inc. QCM6490_fd2913cf
作者:王纪尧 高通工程师
相关文章:
编译安装并刷写高通智能机器人SDK
The Qualcomm Intelligent Robotics Product SDK (QIRP SDK) 高通智能机器SDK基于ROS2进行开发,此SDK适用于高通linux发行版本,QIRPSDK中提供以下内容: ROS 包中用于支持机器人应用程序开发的参考代码 用于评估机器人平台的端到端场景示例集…...

软考:案例题分析1101
22年第一题:架构设计与评估 分析文字,识别需求和质量属性?这里需要记忆质量属性有那些,区分需求和质量属性,能区分出质量属性之间的区别。 我的回答: 差距分析: 根据题目中功能的特点ÿ…...
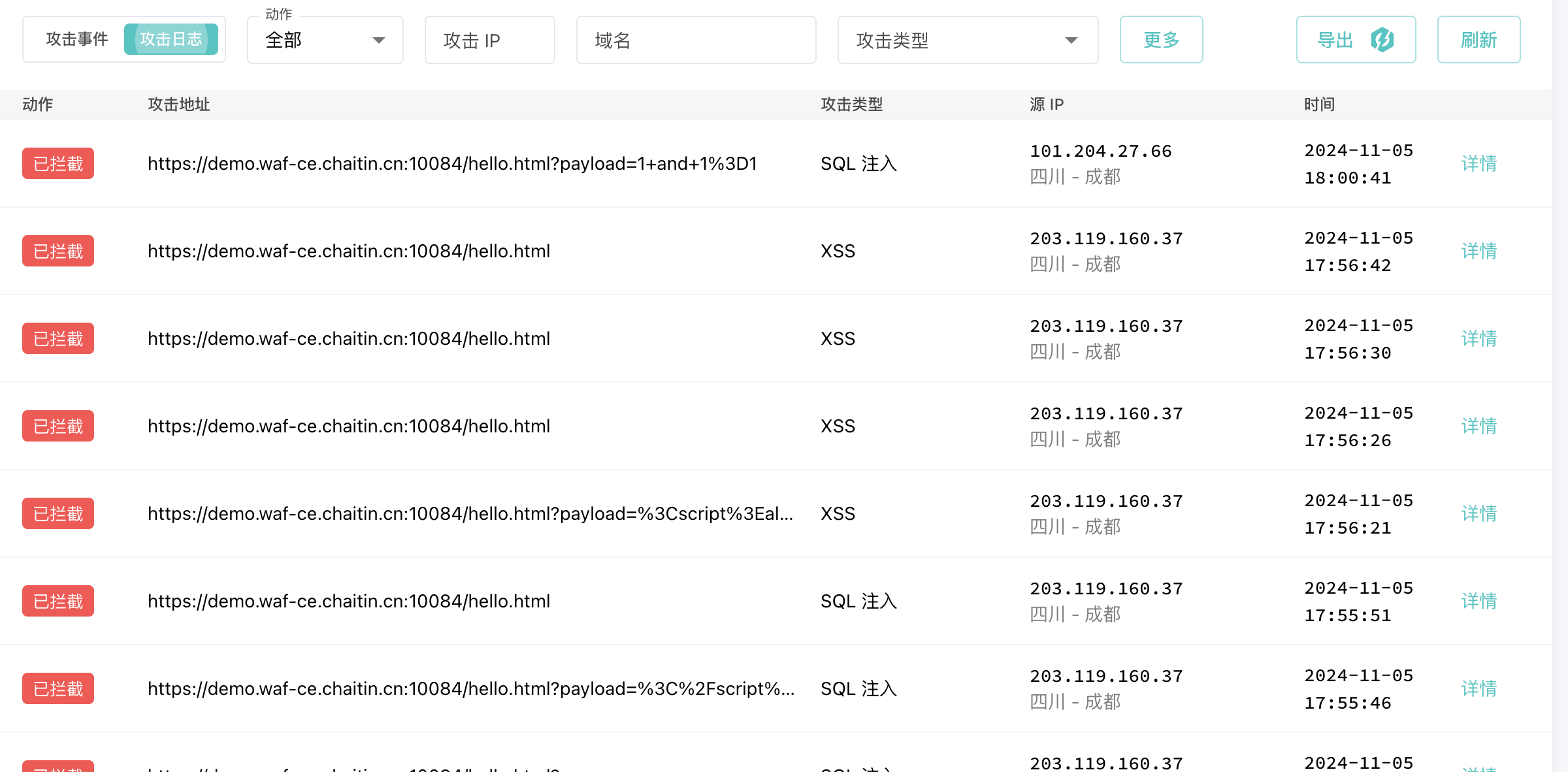
如何检查雷池社区版 WAF 是否安装成功?
容器运行状态检查: 使用命令行检查:打开终端,连接到安装雷池的服务器。运行 docker ps 命令,查看是否有与雷池相关的容器正在运行。 如果能看到类似 safeline-mgt、safeline-tengine 等相关容器,并且状态为 Up&#x…...
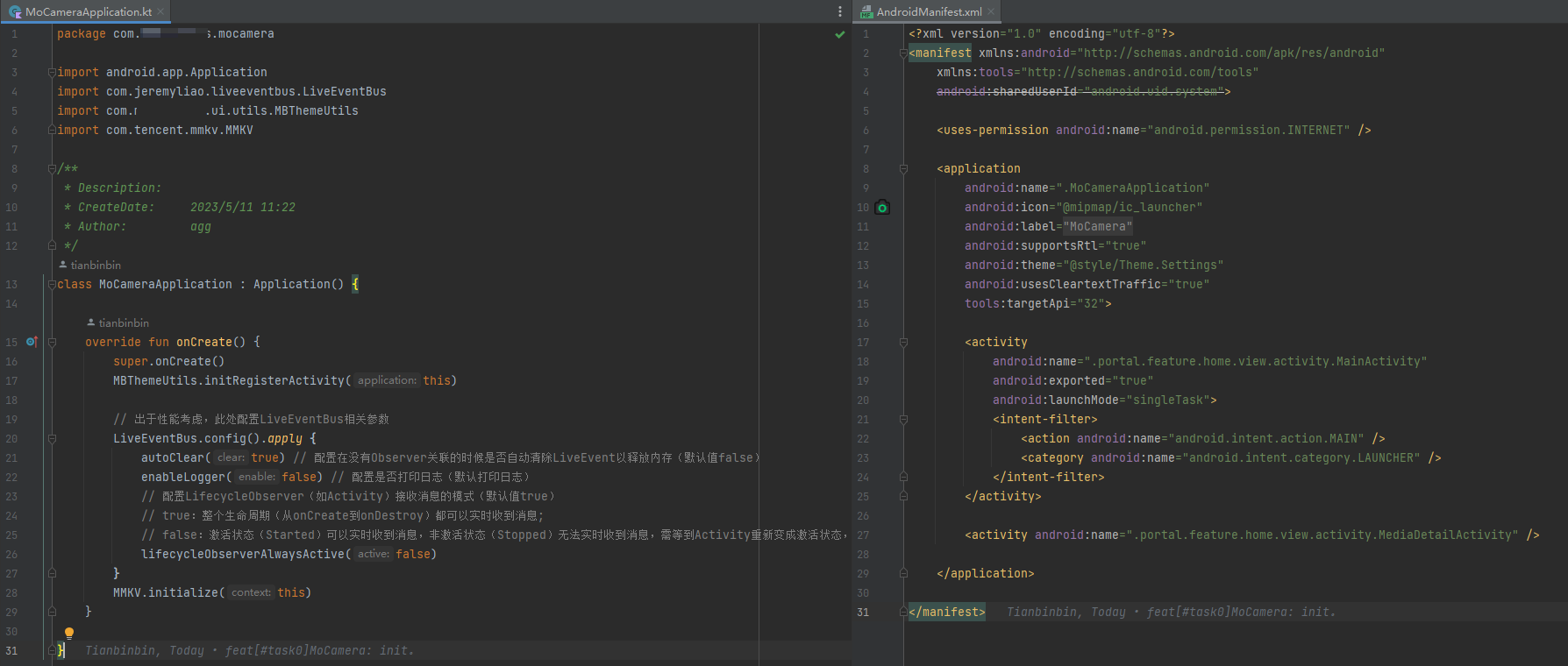
一周内从0到1开发一款 AR眼镜 相机应用?
目录 1. 📂 前言 2. 💠 任务拆分 2.1 产品需求拆分 2.2 开发工作拆分 3. 🔱 开发实现 3.1 代码目录截图 3.2 app 模块 3.3 middleware 模块 3.4 portal 模块 4. ⚛️ 拍照与录像 4.1 前滑后滑统一处理 4.2 初始化 View 以及 Came…...

vue3中setup的作用是什么?
Vue 3.0中的setup函数是一个全新的选项,它是在组件创建时执行的一个函数,用于替代Vue2.x中的beforeCreate和created钩子函数。setup函数的作用是将组件的状态和行为进行分离,使得组件更加清晰和易于维护。 在本文中,我们将详细讲解…...
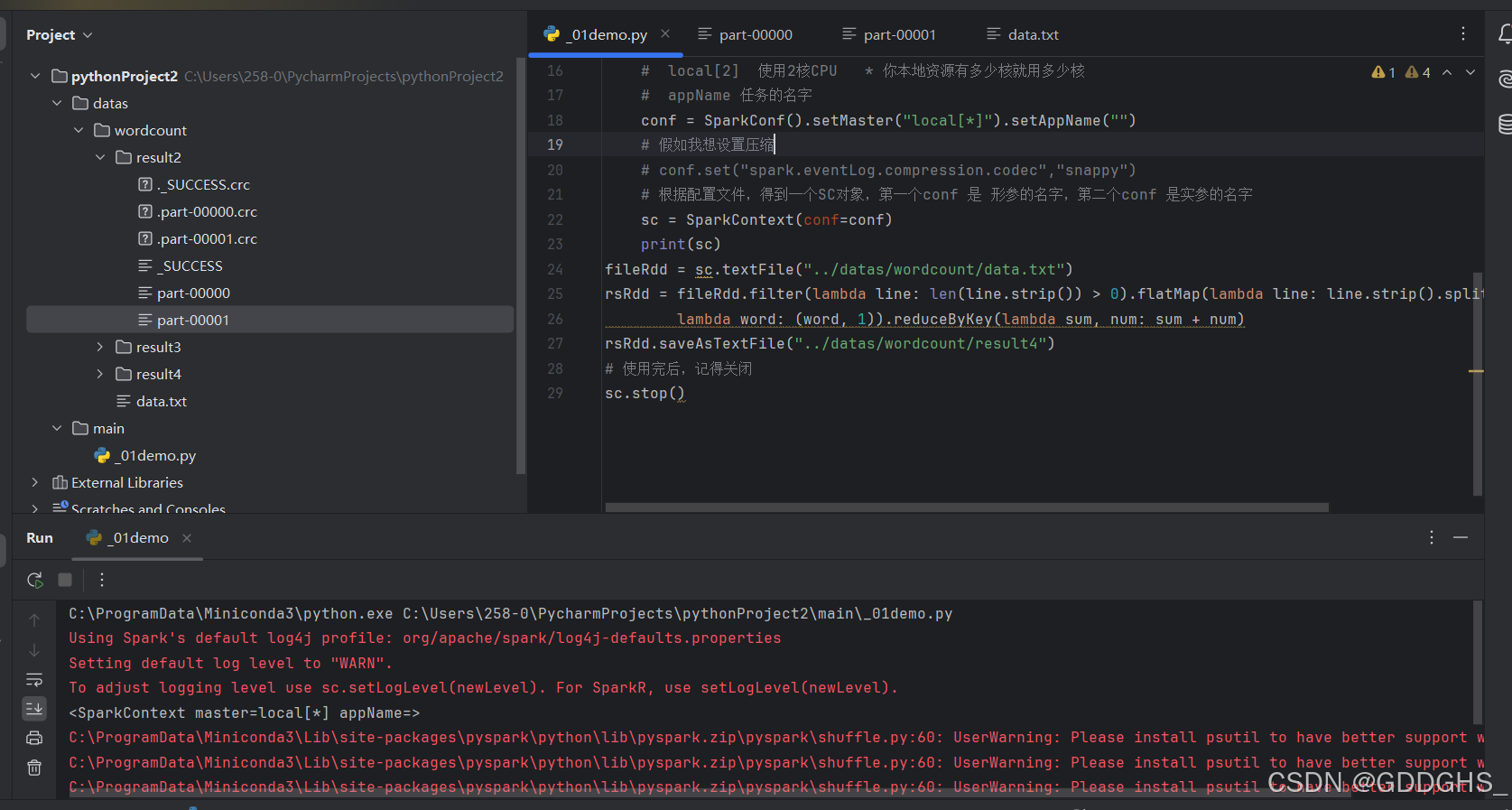
java.io.FileNotFoundException: Could not locate Hadoop executable: (详细解决方案)
1,当你在pycharm 上运行spark代码时候出现下面这个报错。 解决方案 我们要先去hadoop的bin目录下去看看里面是否有 winutils.exe 这个错误 就是缺少winutils.exe 所以报这个错误,把它放到你的hadoop的bin目录下问题就解决了...
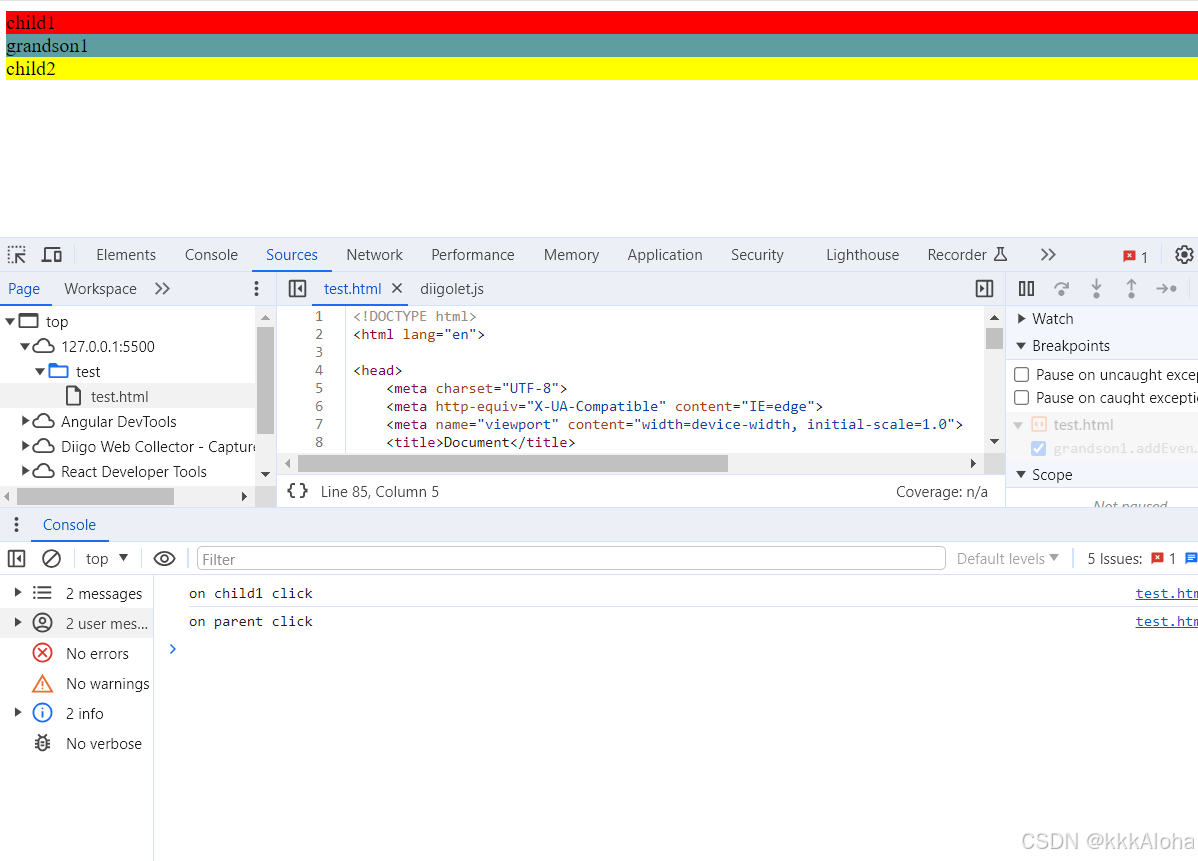
事件捕获vs 事件冒泡,延申事件委托
事件捕获vs事件冒泡 拿点击事件举例子,点击dom树的某个目标节点: 事件捕获:从根节点到目标节点扩散事件冒泡:从目标节点到根节点扩散 扩散就是说,途中的节点,相应的点击事件都会被触发 但是,只…...
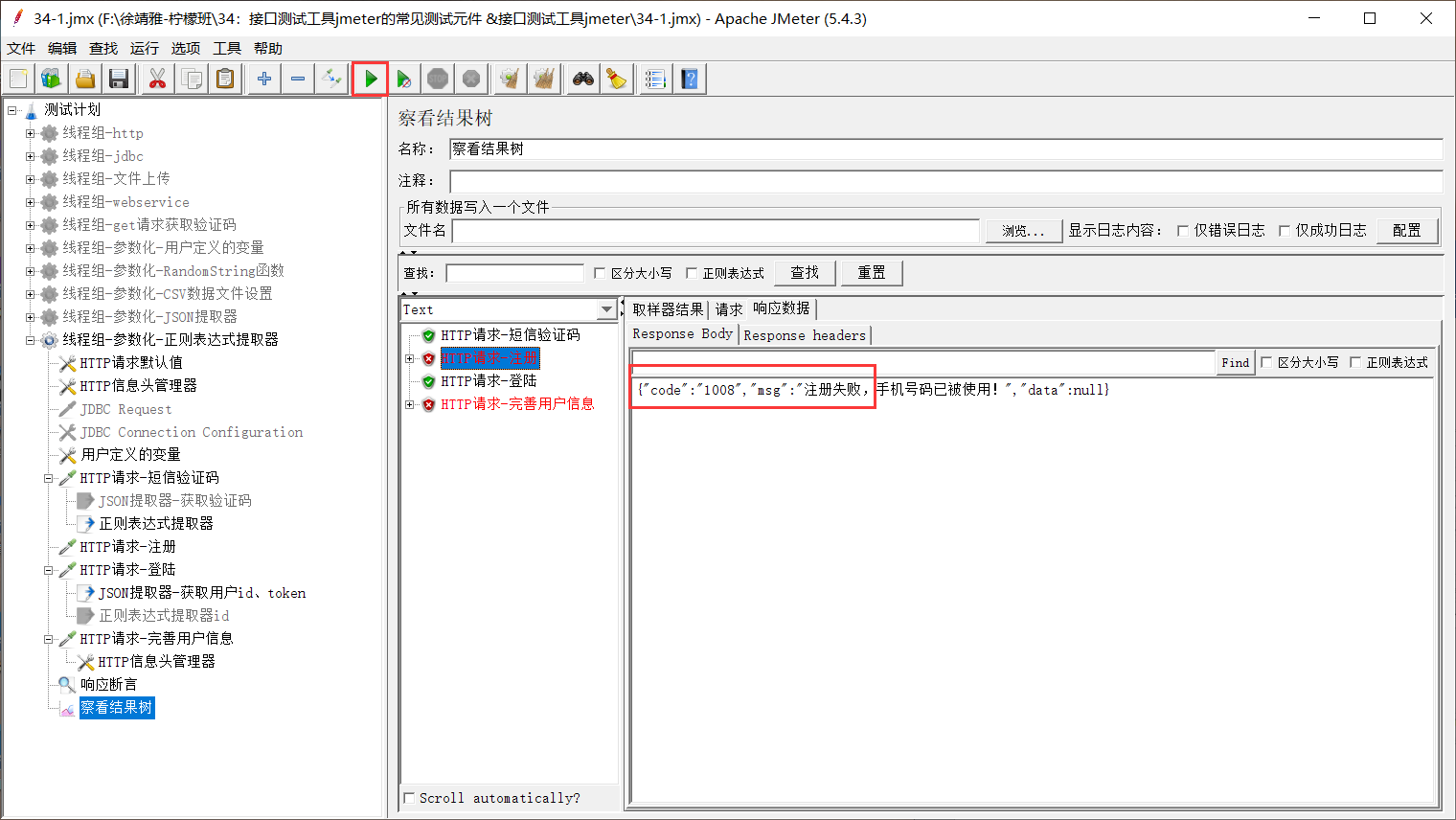
接口测试(十一)jmeter——断言
一、jmeter断言 添加【响应断言】 添加断言 运行后,在【察看结果树】中可得到,响应结果与断言不一致,就会红色标记...

使用buildx构建多架构平台镜像
1. 查看buildx插件信息 比较新的docker-ce版本默认已经集成了buildx插件 [rootdocker ~]# docker buildx version github.com/docker/buildx v0.11.2 9872040 [rootdocker ~]#2. 增加多平台镜像构建支持 通过tonistiigi/binfmt:latest初始化一个基于容器的构建环境ÿ…...
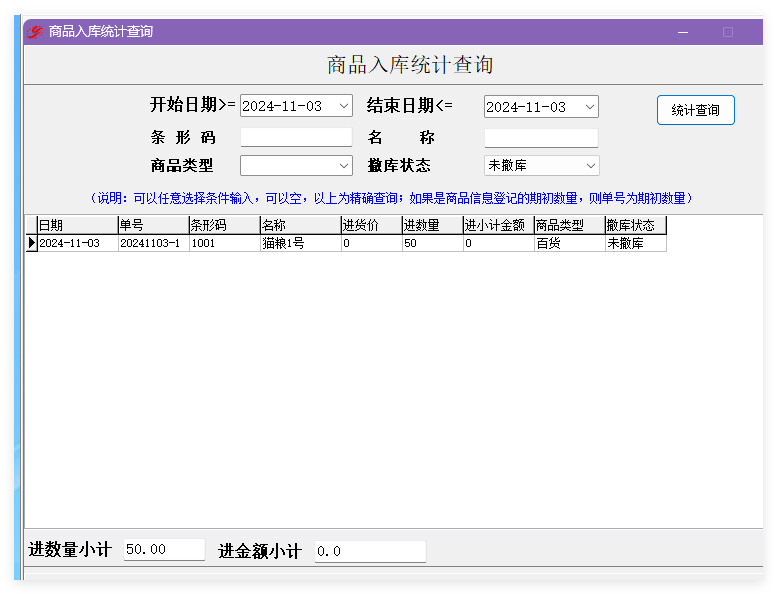
宠物领养救助管理软件有哪些功能 佳易王宠物领养救助管理系统使用操作教程
一、概述 佳易王宠物领养救助管理系统V16.0,集宠物信息登记、查询,宠物领养登记、查询, 宠物领养预约管理、货品进出库库存管理于一体的综合管理系统软件。 概述: 佳易王宠物领养救助管理系统V16.0,集宠物信息登记…...

Spring Boot中实现多数据源连接和切换的方案
Spring Boot中实现多数据源连接和切换的方案 在Spring Boot项目中,随着业务需求的增长,我们往往需要连接多个数据库,即实现多数据源连接和切换。这种需求可能源于数据库的读写分离、微服务架构下的服务拆分、数据分库分表等场景。本文将详细…...

科技资讯|谷歌Play应用商店有望支持 XR 头显,AR / VR设备有望得到发展
据 Android Authority 报道,谷歌似乎正在为其 Play 商店增加对 XR 头显的支持。该媒体在 Play 商店的代码中发现了相关的线索,包括一个代表头显的小图标以及对“XR 头显”的提及。 谷歌也可能改变了此前拒绝将 Play 商店引入 Meta Quest 头显的决定。今…...

关于read/write 网络IO、硬盘IO的区别
对于read/write API,在数据在不超过指定的长度的时候有多少读多少,没有数据则会一直等待。 因此,对于网络IO,由于我们无法知道网络对面什么时候准备好数据,什么时候发起数据。所以使用read/write的话,可能…...
常抛异常情况以及处理方法汇总)
vue2开发 对接后端(go语言)常抛异常情况以及处理方法汇总
背景 在Vue2开发中,与后端(Go语言)接口对接时出现异常通常是由于前后端之间的数据交互出现了问题。常见的异常包括数据格式不匹配、请求方法不匹配、请求头部信息错误、跨域请求问题等。 常见异常 如出现报错提示: json : can…...

LSTM:解决梯度消失与长期依赖问题
LSTM:解决梯度消失与长期依赖问题 长短期记忆网络(LSTM)是一种特殊类型的递归神经网络(RNN),设计用来克服标准RNN在处理长序列数据时遇到的梯度消失问题。下面是对您提供的LSTM特性描述的详细解释…...

Kafka在大数据处理中的作用及其工作原理
Kafka在大数据处理中扮演着至关重要的角色,其作用及工作原理可以从以下几个方面进行解释: 一、Kafka的作用 消息队列: Kafka作为一个高性能、高可伸缩性的消息队列,能够有效地解耦数据生产者和消费者之间的关系,实现…...

w~自动驾驶~合集5
我自己的原文哦~ https://blog.51cto.com/whaosoft/12304427 # 智能驾驶仿真测试的『虚幻』与『真实』 先给大家讲个故事:某主机厂计划构建一套智能驾驶仿真环境,但需同时满足“对外展示”和“项目使用”两方面需求,与供应商商讨一个月后&…...

Java优先队列的使用
1. 优先队列的定义 PriorityQueue继承了Queue接口,底层默认是一个小根堆。 PriorityQueue<Integer> queuenew PriorityQueue<>(); 2. 常用方法 方法描述boolean offer(E e)入队列E poll()出队列E peek()得到队首元素 int size() 返回集合中的元素个…...
20241105,LeetCode 每日一题,用 Go 实现两数之和的非暴力解法
题目 给定一个整数数组 nums 和一个整数目标值 target,请你在该数组中找出 和为目标值 target 的那 两个 整数,并返回它们的数组下标。 你可以假设每种输入只会对应一个答案,并且你不能使用两次相同的元素。 你可以按任意顺序返回答案。 …...
mysql之命令行基础指令
一:安装好mysql后,注册好账号密码。 二:在命令行进行登录的指令如下 mysql -u用户名 -p 例如:mysql -uroot -p; 然后按下回车,进入输入密码。 三:基本指令: 1:查看当前账户的所有…...

抖音无水印视频解析终极指南:5分钟快速上手DouYinBot
抖音无水印视频解析终极指南:5分钟快速上手DouYinBot 【免费下载链接】DouYinBot 该项目仅自用,不提供抖音视频下载 项目地址: https://gitcode.com/gh_mirrors/do/DouYinBot 在短视频创作日益普及的今天,如何快速获取抖音无水印视频、…...

BetterGI:为忙碌原神玩家设计的智能自动化解决方案
BetterGI:为忙碌原神玩家设计的智能自动化解决方案 【免费下载链接】better-genshin-impact 📦BetterGI 更好的原神 - 自动拾取 | 自动剧情 | 全自动钓鱼(AI) | 全自动七圣召唤 | 自动伐木 | 自动刷本 | 自动采集/挖矿/锄地 | 一条龙 | 全连音游 | 自动…...

Android HTTPS抓包失败根源:系统证书信任链详解
1. 为什么HTTPS抓包总在“证书验证失败”这一步卡死? 你肯定试过:Wireshark抓不到App的加密流量,Fiddler在Windows上跑得好好的,一换到Android手机就提示“您的连接不是私密连接”,Charles反复弹出证书安装提醒却始终无…...

SpringBoot+Vue学校课程管理系统源码+论文
代码可以查看文章末尾⬇️联系方式获取,记得注明来意哦~🌹 分享万套开题报告任务书答辩PPT模板 作者完整代码目录供你选择: 《SpringBoot网站项目》1800套 《SSM网站项目》1500套 《小程序项目》1600套 《APP项目》1500套 《Python网站项目》…...

五八同城登录接口逆向:RSA加密、动态salt与sign验签实战
1. 这不是“爬个登录”那么简单:五八同城登录接口逆向的真实战场你点开浏览器开发者工具,F12,Network 面板里筛选 XHR,找到那个/login请求,点开看 Headers 和 Payload —— 然后傻眼了:password字段是一串 …...

SSH连接报kex_exchange_identification的4步根因定位法
1. 这个报错不是SSH客户端的问题,而是服务器在“拒之门外” “kex_exchange_identification”——这串字符第一次出现在终端里时,我正帮一位刚转行做运维的同事排查一台新部署的Ubuntu云服务器。他反复执行 ssh userip ,每次都在输入密码前…...

电池阻抗测量技术:伪随机序列与信号处理应用
1. 电池阻抗测量技术概述电池阻抗测量作为电化学系统状态监测的核心手段,其原理基于对电池施加特定激励信号并测量响应信号,通过分析两者的幅值和相位关系来获取阻抗谱。这种频域分析方法能够反映电池内部电荷转移、扩散过程等动力学特性,为电…...

AI安全实战:生成式AI安全防御的实战技巧
AI安全实战:生成式AI安全防御的实战技巧📝 本章学习目标:本章聚焦实战应用,通过案例帮助读者将理论转化为实践能力。通过本章学习,你将全面掌握"AI安全实战:生成式AI安全防御的实战技巧"这一核心…...
)
告别踩坑:手把手教你为openEuler 22.03 LST配置RealVNC 6.11远程桌面(含序列号激活)
深度指南:在openEuler 22.03 LTS上部署RealVNC企业级远程桌面方案对于需要在Linux环境下实现远程图形化管理的用户而言,RealVNC作为一款成熟的商业解决方案,提供了比开源工具更稳定的连接性能和更完善的安全机制。本文将基于openEuler 22.03 …...

别再为医学影像格式发愁了!3D Slicer 5.x 保姆级数据导入与格式转换指南
医学影像处理实战:3D Slicer 5.x全格式兼容指南与高效工作流医学影像研究的第一步往往就卡在数据导入环节——当你从医院PACS系统拿到DICOM序列,从合作方收到NRRD压缩包,或是下载公开数据集的NIFTI文件时,3D Slicer中那些灰色的&q…...