软间隔支持向量机
软间隔支持向量机
我们先直接给出软间隔支持向量机的形式:
P = min ω , b , ζ 1 2 ∥ ω ∥ 2 2 − C ∑ i = 1 m ζ i s . t . y i ( ω x i + b ) ≥ 1 − ζ i , i = 1 , 2 , 3.. m ζ i ≥ 0 , i = 1 , 2 , 3.. m P = \min_{\omega,b,\zeta} \frac{1}{2}\Vert \omega \Vert_2^2 - C\sum_{i=1}^m\zeta_i\\ s.t. y_i(\omega x_i+b) \geq 1-\zeta_i,i=1,2,3..m\\ \zeta_i \geq 0,i=1,2,3..m P=ω,b,ζmin21∥ω∥22−Ci=1∑mζis.t.yi(ωxi+b)≥1−ζi,i=1,2,3..mζi≥0,i=1,2,3..m
线性可分的对立面一定是线性不可分,这个时候无论如何改变超平面与支持向量,数据都无法从线性可分转为线性不可分。但是对于完全杂乱的数据来说,我们往往还会遇到一种情况就是数据中存在一小部分的特异点而导致数据线性不可分,如图所示: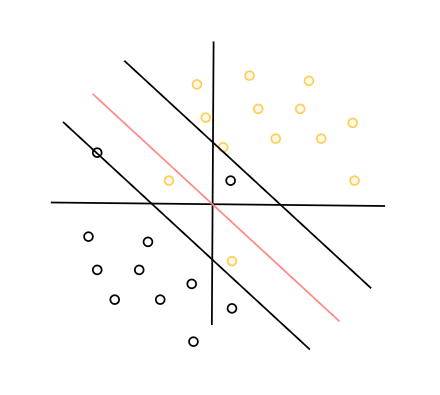
在这种情况下如果直接选择线性不可分的算法反而会让我们的问题更复杂,同时也可能导致过拟合的问题,那么我们不妨放松一定的硬间隔限制,允许错误分类。或者说,允许尽可能少的错误分类,从而获得更好的泛化效果。
对于正分类点的错误分类来说,我们可以划分为三种,如图上Case1,Case2,Case3三个点,分别代表了允许特异点进入超平面与正支持向量之间,允许特异点进入超平面与负支持向量之间,允许特异点进入负分类区间。
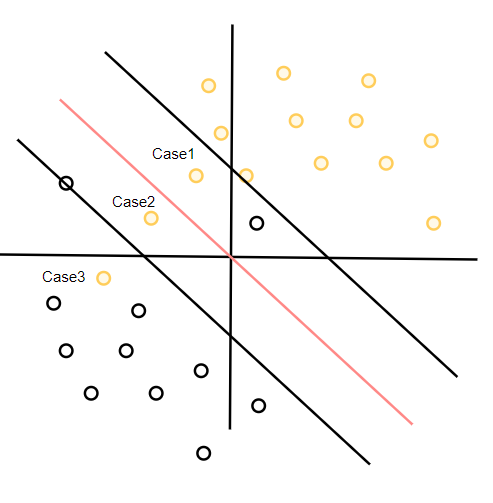
针对三种情况我们分别分析,同时引入松弛变量。引入松弛变量的目的就是为了放松硬间隔的区间限制,让原本只能出现在过支持向量与超平面平行的平面正侧的点可以出现在其他地方,为了方便分析我们假设最优超平面如图所示 ω X + b = 0 \omega X+b=0 ωX+b=0保持不动,研究如何调整限制条件,以允许线性不可分样本可以存在。
1. Case1
我们将Case1的特征向量代入超平面得到 ω X c + b = P \omega X_c+b=P ωXc+b=P,显然 0 < P < 1 0<P<1 0<P<1,此时 0 ≤ Y c ( ω X c + b ) < 1 0\leq Y_c(\omega X_c+b)<1 0≤Yc(ωXc+b)<1
原来我们要求正分类点在正支持向量右上方的时候限制条件为: Y c ( ω X c + b ) ≥ 1 Y_c(\omega X_c+b)\geq 1 Yc(ωXc+b)≥1
将Case1的点纳入限制范围,则限制条件变为 Y c ( ω X c + b ) ≥ 0 Y_c(\omega X_c+b) \geq 0 Yc(ωXc+b)≥0
我们假设松弛变量 0 ≤ ζ ≤ 1 0\leq \zeta \leq 1 0≤ζ≤1,那么限制条件就可以转换为: Y c ( ω X c + b ) ≥ 1 − ζ Y_c(\omega X_c+b) \geq 1-\zeta Yc(ωXc+b)≥1−ζ
此时我们允许误分类点进入正支持向量平面与超平面之间
2. Case2
我们将Case2的特征向量代入超平面得到 ω X c + b = P \omega X_c+b=P ωXc+b=P,显然 − 1 < P < 0 -1<P<0 −1<P<0,此时 − 1 ≤ Y c ( ω X c + b ) < 0 -1\leq Y_c(\omega X_c+b)<0 −1≤Yc(ωXc+b)<0
原来我们要求正分类点在超平面右上方的时候限制条件为: Y c ( ω X c + b ) ≥ 0 Y_c(\omega X_c+b) \geq 0 Yc(ωXc+b)≥0
将Case2的点纳入限制范围,则限制条件变为 Y c ( ω X c + b ) ≥ − 1 Y_c(\omega X_c+b) \geq -1 Yc(ωXc+b)≥−1
我们假设松弛变量 0 ≤ ζ ≤ 2 0\leq \zeta \leq 2 0≤ζ≤2,那么限制条件就可以转换为: Y c ( ω X c + b ) ≥ 1 − ζ Y_c(\omega X_c+b) \geq 1-\zeta Yc(ωXc+b)≥1−ζ
此时我们允许误分类点进入负支持向量平面与超平面之间
3. Case3
我们将Case1的特征向量代入超平面得到 ω X c + b = P \omega X_c+b=P ωXc+b=P,显然 P < − 1 P<-1 P<−1,此时$ Y_c(\omega X_c+b)<-1$
原来我们要求正分类点在负支持向量右上方平面的时候限制条件为: Y c ( ω X c + b ) ≥ − 1 Y_c(\omega X_c+b) \geq -1 Yc(ωXc+b)≥−1
我们假设松弛变量$0\leq \zeta ,那么限制条件就可以转换为: ,那么限制条件就可以转换为: ,那么限制条件就可以转换为:Y_c(\omega X_c+b) \geq 1-\zeta$
此时我们允许误分类点进入负分类区间
4. 限制松弛变量
之前的内容我们是从已经引入松弛变量的角度分析为什么在模型中要求 ζ i ≥ 0 \zeta_i \geq 0 ζi≥0,现在我们来分析松弛变量是如何引入目标函数的。
显然我们现在对每一个特异点都设置了一个松弛变量 ζ i \zeta_i ζi使得原来的模型能够容纳这些错误的情况,但是如果不对这种放松进行惩罚,在面对线性不可分的数据时,模型可以随意让样本点可以随意靠近或穿过超平面。
样本点随意靠近或穿过超平面,这就忽略了我们不同类别的数据点到这个超平面的最小距离(即间隔)最大这个核心目标。因为不加限制的话,会导致几何间隔 2 ∥ ω ∥ \frac{2}{\Vert \omega \Vert} ∥ω∥2不断的变小。
那为什么会导致几何间隔 2 ∥ ω ∥ \frac{2}{\Vert \omega \Vert} ∥ω∥2不断的变小呢?
假设我们已经有超平面可以将两类数据大部分分开,则正负支持向量之间的间隔恰好为 2 ∥ ω ∥ \frac{2}{\Vert \omega \Vert} ∥ω∥2,当我们不惩罚 ζ i \zeta_i ζi,并且想要把这个数据点也正确分类。为了使 y i ( ω x i + b ) ≥ 1 − ζ i ζ i ≥ 0 y_i(\omega x_i+b) \geq 1-\zeta_i \quad \zeta_i \geq 0 yi(ωxi+b)≥1−ζiζi≥0成立,我们不得不增大 ζ i \zeta_i ζi,同时调整超平面。调整超平面可能就会导致我们的几何间隔变小,这会与我们间隔最大化这个问题相违背。所以必须增加惩罚。我们为每一个松弛变量添加惩罚,同时设置一个参数可以控制惩罚的力度,进而我们就得到了:
P ∗ = max 1 ∥ ω ∥ ∥ + C ∑ i = 1 N ζ i s . t . y i ( ω x i + b ) ≥ 1 − ζ i , i = 1 , 2 , 3.. N ζ i ≥ 0 , i = 1 , 2 , 3.. N P^* = \max_{} \frac{1}{\Vert \omega \Vert}\Vert + C\sum_{i=1}^N\zeta_i\\ s.t. y_i(\omega x_i+b) \geq 1-\zeta_i,i=1,2,3..N\\ \zeta_i \geq 0,i=1,2,3..N P∗=max∥ω∥1∥+Ci=1∑Nζis.t.yi(ωxi+b)≥1−ζi,i=1,2,3..Nζi≥0,i=1,2,3..N
我们的问题其实转为了在 ω \omega ω和松弛变量 ζ \zeta ζ 之间寻求一个平衡,而C是来控制这个平衡的程度。最终我们将问题转为我们一开始的最小化问题P。
5. 求解P
根据拉格朗如对偶法构建拉格朗日函数:
L ( ω , b , ζ , α , μ ) = 1 2 ∥ ω ∥ 2 2 + C ∑ i = 1 N ζ i − ∑ i = 1 m α i [ y i ( ω x i + b ) − 1 + ζ i ] − ∑ i = 1 m μ i ζ i a n d μ i ≥ 0 , ζ i ≥ 0 L(\omega,b,\zeta,\alpha,\mu) =\frac{1}{2}\Vert \omega \Vert_2^2 +C\sum_{i=1}^N\zeta_i-\sum_{i=1}^m\alpha_i[y_i(\omega x_i+b) - 1+\zeta_i]-\sum_{i=1}^m \mu_i\zeta_i \\and \\\mu_i \geq0,\zeta_i \geq 0 L(ω,b,ζ,α,μ)=21∥ω∥22+Ci=1∑Nζi−i=1∑mαi[yi(ωxi+b)−1+ζi]−i=1∑mμiζiandμi≥0,ζi≥0
则优化的目标函数为: min ω , b , ζ max μ i , ζ i L ( ω , b , ζ , α , μ ) \min_{\omega,b,\zeta}\max_{\mu_i,\zeta_i} L(\omega,b,\zeta,\alpha,\mu) minω,b,ζmaxμi,ζiL(ω,b,ζ,α,μ)
符合Slater条件转为对偶问题: max μ i , ζ i min ω , b , ζ L ( ω , b , ζ , α , μ ) \max_{\mu_i,\zeta_i}\min_{\omega,b,\zeta} L(\omega,b,\zeta,\alpha,\mu) maxμi,ζiminω,b,ζL(ω,b,ζ,α,μ)
先求最小化问题:
∂ L ∂ w = 0 ⇒ w = ∑ i = 1 m α i y i x i ∂ L ∂ b = 0 ⇒ ∑ i = 1 m α i y i = 0 ∂ L ∂ ξ = 0 ⇒ C − α i − μ i = 0 \frac{\partial L}{\partial w} = 0 \;\Rightarrow w = \sum\limits_{i=1}^{m}\alpha_iy_ix_i \\ \frac{\partial L}{\partial b} = 0 \;\Rightarrow \sum\limits_{i=1}^{m}\alpha_iy_i = 0 \\ \frac{\partial L}{\partial \xi} = 0 \;\Rightarrow C- \alpha_i - \mu_i = 0 ∂w∂L=0⇒w=i=1∑mαiyixi∂b∂L=0⇒i=1∑mαiyi=0∂ξ∂L=0⇒C−αi−μi=0
代入消去 ω , b \omega,b ω,b
L ( ω , b , ζ , α , μ ) = ∑ i = 1 m α i − 1 2 ∑ i = 1 , j = 1 m α i α j y i y j x i T x j L(\omega,b,\zeta,\alpha,\mu) = \sum\limits_{i=1}^{m}\alpha_i - \frac{1}{2}\sum\limits_{i=1,j=1}^{m}\alpha_i\alpha_jy_iy_jx_i^Tx_j L(ω,b,ζ,α,μ)=i=1∑mαi−21i=1,j=1∑mαiαjyiyjxiTxj
仔细观察这个式子会发现其实与支持向量机最终得到的公式是一样的,但是不同的是约束条件:
max α ∑ i = 1 m α i − 1 2 ∑ i = 1 , j = 1 m α i α j y i y j x i T x j s . t . ∑ i = 1 m α i y i = 0 C − α i − μ i = 0 α i ≥ 0 ( i = 1 , 2 , . . . , m ) μ i ≥ 0 ( i = 1 , 2 , . . . , m ) \max _{\alpha} \sum\limits_{i=1}^{m}\alpha_i - \frac{1}{2}\sum\limits_{i=1,j=1}^{m}\alpha_i\alpha_jy_iy_jx_i^Tx_j \\ s.t. \; \sum\limits_{i=1}^{m}\alpha_iy_i = 0 \\ C- \alpha_i - \mu_i = 0 \\\alpha_i \geq 0 \;(i =1,2,...,m) \\\mu_i \geq 0 \;(i =1,2,...,m) αmaxi=1∑mαi−21i=1,j=1∑mαiαjyiyjxiTxjs.t.i=1∑mαiyi=0C−αi−μi=0αi≥0(i=1,2,...,m)μi≥0(i=1,2,...,m)
对于三个约束来说代入消去 μ \mu μ可以得到唯一一个约束也就是: 0 ≤ α i ≤ C 0 \leq \alpha_i \leq C 0≤αi≤C,然后我们就可以通过SMO算法来解出最终的 α 和 b \alpha 和b α和b
相关文章:
软间隔支持向量机
软间隔支持向量机 我们先直接给出软间隔支持向量机的形式: P min ω , b , ζ 1 2 ∥ ω ∥ 2 2 − C ∑ i 1 m ζ i s . t . y i ( ω x i b ) ≥ 1 − ζ i , i 1 , 2 , 3.. m ζ i ≥ 0 , i 1 , 2 , 3.. m P \min_{\omega,b,\zeta} \frac{1}{2}\Ve…...

在C++上实现反射用法
0. 简介 最近看很多端到端的工作,发现大多数都是基于mmdet3d来做的,而这个里面用的比较多的形式就是反射机制,这样其实可以比较好的通过类似plugin的形式完成模型模块的插入。当然我们这里不是来分析python的反射机制的。我们这篇文章主要来…...

【学术会议介绍,SPIE 出版】第四届计算机图形学、人工智能与数据处理国际学术会议 (ICCAID 2024,12月13-15日)
第四届计算机图形学、人工智能与数据处理国际学术会议 2024 4th International Conference on Computer Graphics, Artificial Intelligence and Data Processing (ICCAID 2024) 重要信息 大会官网:www.iccaid.net 大会时间:2024年12月13-15日 大会地…...
)
网络百问百答(一)
什么是链接? 链接是指两个设备之间的连接,它包括用于一个设备能够与另一个设备通信的电缆类型和协议。OSI参考模型的层次是什么? 有7个OSI层:物理层,数据链路层,网络层,传输层,会话层…...

【深圳大学】数据结构A+攻略(计软版)
1. 考试 1.1 形式 分为平时,笔试,机试三部分。其中: 平时占30%,包含平时OJ测验和课堂练习,注意这个可能会因老师的不同和课题组的新策略而改变。笔试占60%,是分值占比的主要部分。机试占10%。 1.2 题型…...

解读《ARM Cortex-M3 与Cortex-M4 权威指南》——第4章 架构
推荐大佬做的讲解 可以帮助加深理解 ARM架构及汇编 Cortex-M3 和 Cortex-M4 处理器都是基于ARMv7-M架构 需要完成对编程模型、异常(如中断)如何处理、存储器映射、如何使用外设以及如何使用微控制器供应商提供的软件驱动库文件等 Cortex-M3和Cortex-M4处理器有两种操作状态…...

探索 Python HTTP 的瑞士军刀:Requests 库
文章目录 探索 Python HTTP 的瑞士军刀:Requests 库第一部分:背景介绍第二部分:Requests 库是什么?第三部分:如何安装 Requests 库?第四部分:Requests 库的基本函数使用方法第五部分:…...

PostgreSQL 页损坏如何修复
PostgreSQL 错误:关系 base/46501/52712 中的块 480 存在无效的页。 当我们在使用 PostgreSQL 数据库的时候,如果服务器发生 CRASH 或者断电等异常情况的时候,有可能会遇到上面的这个报错信息。那么我们如何去修复这个数据呢,以及…...

Leetcode 75 Sort colors
题意:荷兰国旗问题,给一个数组[0,0,2,1,0],构造成[0,0,0,1,2]的形式,分成三块 https://leetcode.com/problems/sort-colors/description/ 题解: 在任意时刻,i 左边的数都是 0,k 右边的数都是 …...

如何进行数据库连接池的参数优化?
以下是进行数据库连接池参数优化的一些方法: 一、确定合适的初始连接数: 考虑因素:数据库的规模、应用程序的启动需求以及预期的初始负载。如果数据库规模较小且应用程序启动时对数据库的即时访问需求不高,可以将初始连接数设置…...
有了miniconda,再也不用担心python、nodejs、go的版本问题了
哈喽,大家好!我是「励志前端小黑哥」,我带着最新发布的文章又来了! 专注前端领域10年,专门分享那些没用的前端知识! 今天要分享的内容,是一个免费的环境管理工具,它叫Miniconda&…...

openresty入门教程:init_by_lua_block
init_by_lua_block 是 Nginx 配置中用于在 Nginx 启动时执行 Lua 脚本的一个指令。这个指令通常用于初始化全局变量、设置共享内存,或者执行一些需要在服务器启动时完成的准备工作。 以下是一个简单的 init_by_lua_block 使用示例: 1. 安装 Nginx 和 L…...

sol机器人pump机器人如何实现盈利的?什么是Pump 扫链机器人?
什么是Pump 扫链机器人,它的盈利逻辑优化策略是什么? Pump 扫链机器人,通过智能化、自动化的买卖操作帮助投资者实现快速盈利。在此基础上,我们对该机器人的盈利逻辑进行了深度优化,涵盖了买入策略和止盈策略的各个方面…...

Spring-boot 后端java配置接口返回jsp页面
Spring-boot 后端java配置接口返回jsp页面 spring boot 基于spring MVC的基础上进行了改进, 将Controller 与ResponseBody 进行了合并成一个新的注解 RestController。 当用户请求时,需要有视图渲染的,与请求数据的请求分别使用 1.在appli…...

LabVIEW车辆侧翻预警系统
在工业和实验室环境中,搬运车辆、叉车和特种作业车辆经常在负载和高速转弯过程中发生侧翻事故,导致设备损坏和人员伤害。为提高工作环境的安全性,开发了一种基于LabVIEW的工业车辆侧翻预警系统,能够实时监测车辆状态并发出预警&am…...

亲测有效:Maven3.8.1使用Tomcat8插件启动项目
我本地maven的settings.xml文件中的配置: <mirror><id>aliyunmaven</id><mirrorOf>central</mirrorOf><name>阿里云公共仓库</name><url>https://maven.aliyun.com/repository/public</url> </mirror>…...

Find My电子体温计|苹果Find My技术与体温计结合,智能防丢,全球定位
电子体温计由温度传感器,液晶显示器,纽扣电池,专用集成电路及其他电子元器件组成。能快速准确地测量人体体温,与传统的水银玻璃体温计相比,具有读数方便,测量时间短,测量精度高,能记…...

jmeter常用配置元件介绍总结之后置处理器
系列文章目录 安装jmeter jmeter常用配置元件介绍总结之后置处理器 8.后置处理器8.1.CSS/JQuery提取器8.2.JSON JMESPath Extractor8.3.JSON提取器8.4.正则表达式提取器8.5.边界提取器8.5.Debug PostProcessor8.6.XPath2 Extractor8.7.XPath提取器8.8.结果状态处理器 8.后置处理…...

html5多媒体标签
文章目录 HTML5新增多媒体标签详解:视频标签与音频标签视频标签<video>音频标签<audio>代码案例 HTML5新增多媒体标签详解:视频标签与音频标签 HTML5引入了多项新特性,其中多媒体标签的引入为网页开发带来了革命性的变化。这些标…...

51c自动驾驶~合集10
我自己的原文哦~ https://blog.51cto.com/whaosoft/11638131 #端到端任务 说起端到端,每个从业者可能都觉得会是下一代自动驾驶量产方案绕不开的点!特斯拉率先吹响了方案更新的号角,无论是完全端到端,还是专注于planner的模型&a…...

【Lovable CRM系统搭建终极指南】:20年实战沉淀的7大避坑法则与即插即用架构模板
更多请点击: https://intelliparadigm.com 第一章:Lovable CRM系统搭建的底层逻辑与价值定位 Lovable CRM并非传统CRM的功能叠加,而是以“人本交互”为原点重构客户关系管理范式——其底层逻辑根植于可扩展的微服务架构、领域驱动设计&#…...

小白程序员必看:收藏这份分词知识框架,轻松入门大模型!
分词是NLP和大型语言模型处理文本的第一步。本文系统介绍了分词的基本概念,详细解析了英文和中文的分词方法,包括词级、字符级和子词级分词的原理与区别。特别强调了子词级分词(如BPE、WordPiece)在解决OOV问题和保留语义结构方面…...

BarrageGrab:15+平台直播弹幕一体化采集方案,毫秒级延迟的WebSocket直连技术
BarrageGrab:15平台直播弹幕一体化采集方案,毫秒级延迟的WebSocket直连技术 【免费下载链接】BarrageGrab 抖音快手bilibili直播弹幕wss直连,非系统代理方式,无需多开浏览器窗口 项目地址: https://gitcode.com/gh_mirrors/ba/B…...

如何用Python自动化脚本高效抢购热门演出门票?智能抢票解决方案揭秘
如何用Python自动化脚本高效抢购热门演出门票?智能抢票解决方案揭秘 【免费下载链接】Automatic_ticket_purchase 大麦网抢票脚本 项目地址: https://gitcode.com/GitHub_Trending/au/Automatic_ticket_purchase 还在为热门演唱会门票秒光而烦恼吗࿱…...

终极免费游戏串流方案:5分钟搭建你的私人云游戏服务器
终极免费游戏串流方案:5分钟搭建你的私人云游戏服务器 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 你是否厌倦了被设备限制的游戏体验?想在客厅大屏电视…...

终极RPG Maker MV/MZ游戏资源解密工具:三步搞定加密文件提取
终极RPG Maker MV/MZ游戏资源解密工具:三步搞定加密文件提取 【免费下载链接】RPG-Maker-MV-Decrypter You can decrypt RPG-Maker-MV Resource Files with this project ~ If you dont wanna download it, you can use the Script on my HP: 项目地址: https://g…...

CANN/pypto Tensor索引功能
pypto.Tensor索引功能说明 【免费下载链接】pypto PyPTO(发音: pai p-t-o):Parallel Tensor/Tile Operation编程范式。 项目地址: https://gitcode.com/cann/pypto Tensor索引是Tensor的核心操作之一,用于从Tensor中筛选、…...

AArch64 TRCCNTCTLR寄存器详解与调试技巧
1. AArch64 TRCCNTCTLR寄存器概述在AArch64架构中,TRCCNTCTLR(Trace Counter Control Register)是嵌入式跟踪扩展(FEAT_ETE)功能的重要组成部分。作为系统调试和性能分析的核心组件,它负责控制跟踪计数器的…...

边缘AI闭环数控系统:基于IIoT的轻量级CNC智能改造实践
1. 项目概述:这不是在改装一台机床,而是在给金属切削装上“神经系统”“AI-Driven Machining: Building a Closed-Loop CNC System with IIoT Feedback (Building the CNC)”——这个标题里没有一个词是虚的。它不是讲怎么用AI生成G代码,也不…...

游戏AI如何迁移战略逻辑到现实决策系统
1. 项目概述:当机器开始玩我们的游戏,背后不是炫技,而是逻辑的迁移“当机器开始玩我们的游戏”——这句话乍听像科幻片开场白,但现实中它早已不是新闻。AlphaGo击败李世石那盘棋之后,很多人以为AI下棋只是算法碾压人类…...