Linux——GPIO输入输出裸机实验
学习了正点原子Linux环境下的GPIO的输入输出的裸机实验学习,现在进行一下小结:
启动文件start.S的编写
.global _start
.global _bss_start
_bss_start:.word __bss_start.global _bss_end
_bss_end:.word __bss_end_start:/*设置处理器进入SVC模式*/mrs r0, cpsr /*读取cpsr到r0*/bic r0, r0, #0x1f /*清除cpsr的bit4-0*/orr r0, r0, #0x13 /*使用SVC模式*/msr cpsr, r0 /*将r0写入到cpsr*//*清除bss段*/ldr r0, =_bss_startldr r1, =_bss_endmov r2, #0
bss_loop:stmia r0!, {r2}cmp r0, r1ble bss_loop/*设置sp指针*/ldr sp, =0x80200000b main /*跳转到C语言main函数*/.global指令用于定义全局变量
.word指令定义了两个符号
_bss_start和_bss_end,它们都初始化为对应的符号__bss_start和__bss_end的地址(在后面讲到的链接脚本文件imx6u.lds中有为这两个符号赋值地址)。这些符号通常用于标识程序中BSS段的开始和结束。BSS段(Block Started by Symbol)是程序数据段的一部分,用于存储未初始化的全局变量和静态变量。在程序启动时,BSS段会被清零,并且其大小会被计算到程序的总内存占用中,尽管它在磁盘上的表示可能非常小或甚至没有。
程序启动会先从启动文件开始执行,默认从_start处开始执行。
Makefile编写
通过make指令可以执行目录下的Makefile文件,我们可以在Makefile文件里编写编译过程的一系列指令,方便开发。
Makefile文件以及相应的注释如下:
#变量赋值,?=如果前面已经有赋值,则用前面的,没有就用等号后面的
CROSS_COMPILE ?= arm-linux-gnueabihf-
TARGET ?= beepCC := $(CROSS_COMPILE)gcc
LD := $(CROSS_COMPILE)ld
OBJCOPY := $(CROSS_COMPILE)objcopy
OBJDUMP := $(CROSS_COMPILE)objdump
#保存头文件所在目录的变量
# \ 表示本行和下一行属于同一行。为换行符
INCUDIRS := project \imx6u \bsp/clk \bsp/led \bsp/delay \bsp/beep#保存源文件所在目录的变量
SRCDIRS := project \bsp/clk \bsp/led \bsp/delay \bsp/beep#将变量INCUDIRS里的值都加上-I前缀
#加-I是以为makefile语法指定头文件目录时候前面要加-I
#patsubst语法:在INCUDIRS中所有的单词前加上-I,因为%为通配符
INCLUDE := $(patsubst %,-I%,$(INCUDIRS))
#foreach作用是将SRCDIRS变量的值赋值给dir然后执行最后的表达式wildcard,
#wildcard的作用是将dir目录下的所有.S文件(前面带着目录)都存入SFILES变量
SFILES := $(foreach dir, $(SRCDIRS), $(wildcard $(dir)/*.S))
CFILES := $(foreach dir, $(SRCDIRS), $(wildcard $(dir)/*.c))
#notdir作用是删除SFILES变量的目录成分,只留文件名
SFILENDIR := $(notdir $(SFILES))
CFILENDIR := $(notdir $(CFILES))
#将没有目录的SFILENDIR的值都加上obj/前缀,并将.S.c替换成.o
SOBJS := $(patsubst %.S,obj/%.o,$(SFILENDIR))
COBJS := $(patsubst %.c,obj/%.o,$(CFILENDIR))
#保存所有的.o文件
OBJS := $(SOBJS) $(COBJS)
#如果当前目录找不到目标文件和依赖文件,就到指定的路径去找
VPATH := $(SRCDIRS)
#伪目标
.PHONY:clean
# 目标文件 : 依赖文件
#-T后面接链接脚本
#-o 指定输出文件名
#$^表示所有的依赖文件,指令的作用是链接所有的依赖文件成可执行文件.elf
#-O表示指定输出的格式为纯二进制文件
#-S表示剥除符号表和重定义表,无调试信息
#$@表示目标文件
#-D表示输出汇编文件 -m表示指定目标架构arm
#>是shell中的重定向操作符,将输出文件重定向到文件.dis
$(TARGET).bin : $(OBJS)$(LD) -Timx6u.lds -o $(TARGET).elf $^$(OBJCOPY) -O binary -S $(TARGET).elf $@$(OBJDUMP) -D -m arm $(TARGET).elf > $(TARGET).dis#-Wall表示显示警告信息
#-nostdlib表示在链接时不使用标准库
#-c表示只进行编译和汇编,不进行链接
#$@表示目标文件 $<表示规则中的第一个依赖文件
$(SOBJS) : obj/%.o : %.S$(CC) -Wall -nostdlib -c -O2 $(INCLUDE) -o $@ $<
$(COBJS) : obj/%.o : %.c$(CC) -Wall -nostdlib -c -O2 $(INCLUDE) -o $@ $<
#清除编译生成的各种文件
clean:rm -rf $(TARGET).elf $(TARGET).bin $(TARGET).dis $(OBJS)
#打印编译过程生成的变量
print:@echo INCLUDE = $(INCLUDE)@echo SFILES = $(SFILES)@echo CFILES = $(CFILES) @echo SFILENDIR = $(SFILENDIR)@echo CFILENDIR = $(CFILENDIR) @echo SOBJS = $(SOBJS)@echo COBJS = $(COBJS) @echo OBJS = $(OBJS) 链接脚本imx6u.lds
SECTIONS{. = 0x87800000;.text :{obj/start.o*(.text)}.rodata ALIGN(4) : {*(.rodata*)}.data ALIGN(4) : {*(.data)}__bss_start=.;.bss ALIGN(4) : {*(.bss) *(COMMON)}__bss_end=.;
}链接脚本的主要作用有定义链接起始地址、调整链接顺序(第一个要连接的文件必须是start.o)
.为定位计数器,默认定位计数器为0,给这个特殊符号赋值0x87800000,后面的链接起始地址就会是0x87800000
代码段可以分为text段、只读数据段、数据段和BSS段'
ALIGN(4)的作用是4字节对齐
BSS段(Block Started by Symbol)是程序数据段的一部分,用于存储未初始化的全局变量和静态变量。在程序启动时,BSS段会被清零,并且其大小会被计算到程序的总内存占用中,尽管它在磁盘上的表示可能非常小或甚至没有
GPIO输入输出配置的库函数
配置复用功能函数
IOMUXC_SetPinMux(IOMUXC_GPIO1_IO03_GPIO1_IO03,0);上面示例中的 IOMUXC_GPIO1_IO03_GPIO1_IO03是一个宏定义,如下:
上面的操作是我们通过传递参数,将对应模式的值放到我们的寄存器地址。也就是将0x5写到0x020E0068为地址的寄存器里,查看参考手册
就是向我们这个寄存器写入0x5,将其复用为GPIO1_IO03



配置电气属性函数
IOMUXC_SetPinConfig(IOMUXC_GPIO1_IO03_GPIO1_IO03,0x10B0);与我们的复用功能函数类似,也是通过传入参数到我们相关的配置寄存器地址中,如下:
为地址为0x020E02F4的配置寄存器写入0x10b0


通过查看参考手册进行对应的电气属性配置
写入0x10B0是配置为输出模式
写入0xF080是配置为输入模式,上拉,使能迟滞比较器



GPIO寄存器组

 通过结构体指针操作寄存器组,进而配置GPIO为输入还是输出模式,1为输出模式。0为输入模式
通过结构体指针操作寄存器组,进而配置GPIO为输入还是输出模式,1为输出模式。0为输入模式
相关文章:
Linux——GPIO输入输出裸机实验
学习了正点原子Linux环境下的GPIO的输入输出的裸机实验学习,现在进行一下小结: 启动文件start.S的编写 .global _start .global _bss_start _bss_start:.word __bss_start.global _bss_end _bss_end:.word __bss_end_start:/*设置处理器进入SVC模式*/m…...

华为鸿蒙HarmonyOS NEXT升级HiCar:打造未来出行新体验
随着科技的不断进步,智能出行已成为我们生活中不可或缺的一部分。华为凭借其在智能科技领域的深厚积累,推出了全新的鸿蒙HarmonyOS NEXT系统,旨在为用户打造一个“人车家”的无缝协同出行体验。这一系统的核心亮点之一,就是其内置…...

【项目组件】第三方库——websocketpp
目录 第三方协议:websocket websocket简介 websocket特点 websocket协议切换 websocket协议格式段 websocketpp库介绍 endpoint server connection websocketpp库搭建服务器流程 基本框架实现 业务处理回调函数的实现 http_callback open_callback …...
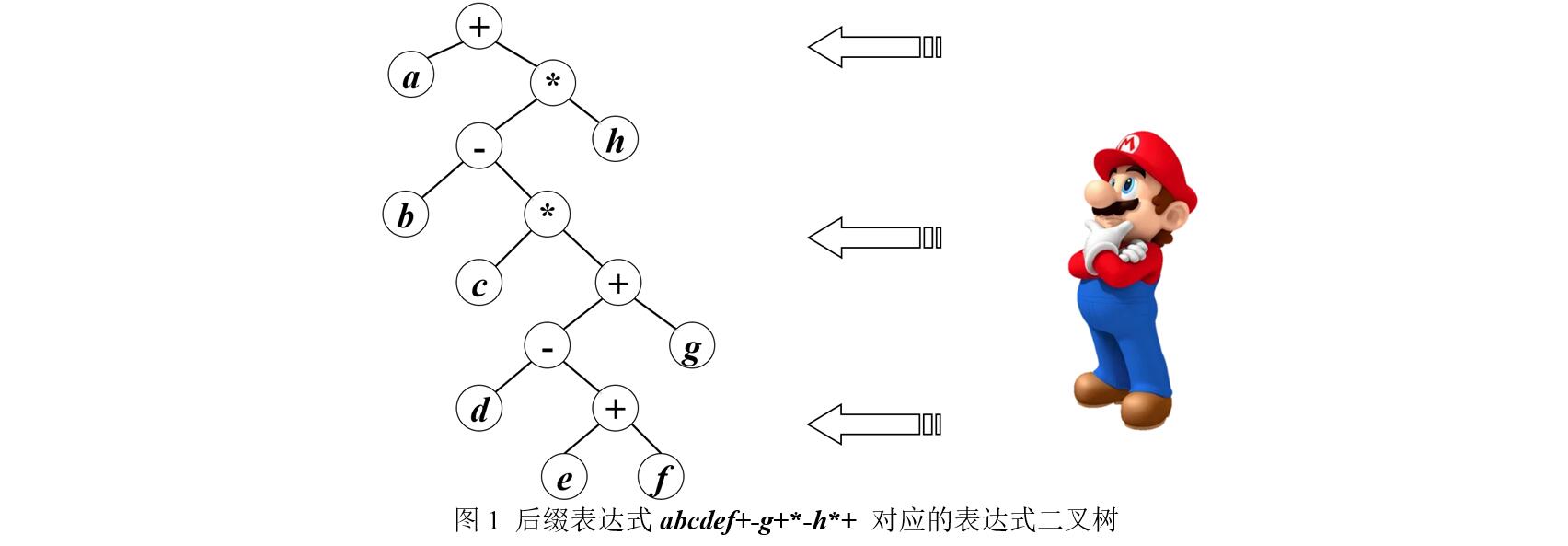
计算机23级数据结构上机实验(第3-4周)
A 二叉树删除子树 编写程序对给定二叉树执行若干次删除子树操作,输出每次删除子树后剩余二叉树的中根序列。二叉树结点的数据域值为不等于0的整数。每次删除操作是在上一次删除操作后剩下的二叉树上执行。 输入格式: 输入第1行为一组用空格间隔的整数,表…...

【大数据学习 | HBASE高级】region split机制和策略
1. region split机制 HRegionServer拆分region的步骤是,先将该region下线,然后拆分,将其子region加入到hbase:meta表中,再将他们加入到原本的HRegionServer中,最后汇报Master。 split前:hbase:meta表有…...

flink实战 -- flink SQL 实现列转行
在 SQL 任务里面经常会遇到一列转多行的需求,下面就来总结一下在 Flink SQL 里面如何实现列转行的,先来看下面的一个具体案例. 需求 原始数据格式如下: namedatatest[{"content_type":"flink","url":"111"},{"content_type&quo…...

React中右击出现自定弹窗
前言 在react中点击右键,完成阻止浏览器的默认行为,完成自定义的悬浮框(Menu菜单). 版本 "react": "^18.2.0", "umijs/route-utils": "^4.0.1", "antd": "^5.18.1", "ant-design/pro-components": &q…...

Unity类银河战士恶魔城学习总结(P128 Switch UI with KeyBoard用键盘切换UI)
【Unity教程】从0编程制作类银河恶魔城游戏_哔哩哔哩_bilibili 教程源地址:https://www.udemy.com/course/2d-rpg-alexdev/ 本章节实现了用键盘切换角色UI,技能树UI,合成面板UI和设置UI UI.cs 1. 变量与字段 characterUI,skill…...

基于Springboot+微信小程序的急救常识学习系统 (含源码数据库)
1.开发环境 开发系统:Windows10/11 架构模式:MVC/前后端分离 JDK版本: Java JDK1.8 开发工具:IDEA 数据库版本: mysql5.7或8.0 数据库可视化工具: navicat 服务器: SpringBoot自带 apache tomcat 主要技术: Java,Springboot,mybatis,mysql,vue 2.视频演示地址 3.功能 该系统…...

【云计算解决方案面试整理】3-7主流云计算平台、云计算架构、安全防护
准备面云计算解决方案的岗位,整理了一些,也请大佬们指点。 文档分为 云计算基础概念、云计算技术原理、主流云计算平台(以天翼云为例)、云计算架构(弹性设计、高可用设计、高性能设计)、安全防护几个方面。 三、主流云计算平台 1.阿里云云计算平台 强大的计算能力:拥有…...

数据库范式、MySQL 架构、算法与树的深入解析
一、数据库范式 在数据库设计中,范式是一系列规则,用于确保数据的组织和存储具有良好的结构、完整性以及最小化的数据冗余。如果不遵循范式设计,数据可能会以平铺式罗列,仅使用冒号、分号等简单分隔。这种方式存在诸多弊端&#…...

设计模式之责任链模式(Chain Of Responsibility)
一、责任链模式介绍 1、责任链模式介绍 职责链模式(chain of responsibility pattern) 定义: 避免将一个请求的发送者与接收者耦合在 一起,让多个对象都有机会处理请求。将接收请求的对象连接成一条链,并且沿着这条链 传递请求,直到有一个对…...

SQLite 全文检索:快速高效的文本查询方案
文章目录 什么是全文检索?如何启用 FTS?插入数据执行全文检索关联原始表与 FTS 表数据更新结论 说明: 本文以博客内容全文检索为例。 什么是全文检索? 全文检索是指对文本数据进行索引和查询的一种技术。与常规的 LIKE 查询不同,…...

【微信小程序】报修管理
一、报修管理 报修管理是为方便业主联系维修师傅的一个服务,业主确认需要维修的房到后,再指定维修项目以及上门的时间待待师傅联系上门服务即可。 1.1 在线报修 业主通过在线的方式填写报修的信息,包括房屋信息、维修项目、联系电话、上门…...

C++——视频问题总结
1、C和C的区别 CC面向过程对象注重程序的实现逻辑程序的整体设计内容C语言采用了一种有序的编程方法——结构化编程:将一个大型程序分解为一个个小型的,易于编写的模块,所有模块有序调动,形成了一个程序的完整的运行链C将问题分解…...

Ubuntu24.04 network:0 unclaimed wireless adapter no found
前言: 所遇问题原因在于,折腾显卡cuda版本,导致nvidia驱动没了,使用sudo ubuntu-drivers autoinstall后,驱动有了,但是reboot后无线网卡无法识别,此外usb无线网络也无法使用,ifconfi…...

Java 使用MyBatis-Plus数据操作关键字冲突报错You have an error in your SQL syntax问题
问题 这个报错是出现在Java Spring boot项目中,使用MyBatis-Plus通过创建的实体类对数据库的操作过程中,通过实体创建数据库表是没有问题的,而在接口调用服务类操作数据库的时候,会出现报错。报错详情如下: 服务请求异…...

深入浅出 ChatGPT 底层原理:Transformer
Transformer 在人工智能和自然语言处理领域,Transformer架构的出现无疑是一个里程碑式的突破。它不仅推动了GPT(Generative Pre-trained Transformer)等大型语言模型的发展,还彻底改变了我们处理和理解自然语言的方式。 GPT与Transformer GPT 近几年,人工智能技…...

opc da 服务器数据 转 IEC61850项目案例
目录 1 案例说明 2 VFBOX网关工作原理 3 应用条件 4 查看OPC DA服务器的相关参数 5 配置网关采集opc da数据 6 用IEC61850协议转发数据 7 网关使用多个逻辑设备和逻辑节点的方法 8 在服务器上运行仰科OPC DA采集软件 9 案例总结 1 案例说明 在OPC DA服务器上运行OPC …...
SystemVerilog学习笔记(十一):接口
在Verilog中,模块之间的通信是使用模块端口指定的。 Verilog模块连接的缺点 声明必须在多个模块中重复。存在声明不匹配的风险。设计规格的更改可能需要修改多个模块。 接口 SystemVerilog引入了 interface 结构,它封装了模块之间的通信。一个 inter…...

深入浅出DPCM与DAPM:图解高通音频架构如何实现动态功耗管理与低延迟播放
深入浅出DPCM与DAPM:图解高通音频架构如何实现动态功耗管理与低延迟播放 在智能穿戴设备和移动终端领域,音频系统的功耗优化一直是工程师面临的重大挑战。想象一下,当你的智能手表在待机状态下播放通知铃声时,如果每次都需要唤醒主…...
)
Perplexity体育搜索冷启动难题终结方案:从数据源注册到热点事件自动聚类,全程12分钟极速上线(含CLI脚本)
更多请点击: https://intelliparadigm.com 第一章:Perplexity体育新闻搜索 Perplexity 是一款以实时网络检索与精准问答能力见长的 AI 搜索工具,其在体育新闻领域的应用显著区别于传统搜索引擎——它不依赖静态索引,而是动态调用…...

Tomcat 超精简总结
1. 定位轻量级 Java Web 服务器 / Servlet 容器只跑 Java 项目(jsp、servlet、springboot 内嵌)处理 动态请求,不擅长静态资源2. 核心作用解析 Servlet、JSP监听端口,接收浏览器请求调用 Java 代码执行业务返回页面 / 数据给客户端…...

从概率图到优化问题:信息矩阵、Hessian矩阵与协方差矩阵的内在统一
1. 概率图模型中的信息矩阵与协方差矩阵 我第一次接触信息矩阵是在做视觉SLAM项目时,当时被一堆矩阵运算绕得头晕。后来才发现,理解它们的关系就像拼乐高——每个零件都有明确的位置和作用。让我们从一个简单的因子图例子开始,看看这些矩阵如…...

UVM验证效率提升:利用仿真器保存恢复机制消除冗余配置周期
1. 验证环境中的冗余周期之痛:一个普遍存在的效率瓶颈在芯片验证领域,尤其是使用UVM(Universal Verification Methodology)构建的复杂验证环境中,我们常常会面临一个看似不起眼、实则消耗巨大的问题:冗余的…...

CANN/catlass精度分析基础
精度分析基础 【免费下载链接】catlass 本项目是CANN的算子模板库,提供NPU上高性能矩阵乘及其相关融合类算子模板样例。 项目地址: https://gitcode.com/cann/catlass 写在前面 该文档主要说明CATLASS样例开发中精度分析的基础知识,包括样例精度…...

Cat-Catch终极指南:5步快速掌握网页资源抓取技巧
Cat-Catch终极指南:5步快速掌握网页资源抓取技巧 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 你是否曾在网上看到一个精彩的视频教程…...

Windows桌面终极整理方案:NoFences免费开源桌面分区工具完全指南
Windows桌面终极整理方案:NoFences免费开源桌面分区工具完全指南 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 你是否每天都在混乱的Windows桌面上寻找需要的文…...

瑞萨RH850芯片HSM软件实现:从硬件隔离到安全通信
1. RH850芯片HSM模块的硬件基础 第一次接触瑞萨RH850芯片的HSM(Hardware Security Module)功能时,我被它精妙的硬件设计所震撼。这颗芯片内部其实藏着两个"大脑":主处理器(Host)和专为安全设计的…...

终极LXMusic音源配置指南:三步解决全网音乐播放难题
终极LXMusic音源配置指南:三步解决全网音乐播放难题 【免费下载链接】LXMusic音源 lxmusic(洛雪音乐)全网最新最全音源 项目地址: https://gitcode.com/guoyue2010/lxmusic- 你是否经常遇到音乐软件资源不全、音质不佳的问题ÿ…...