基于Matlab计算机视觉的车道线识别与前车检测系统研究
随着自动驾驶技术的发展,车道线识别和前车检测成为智能驾驶系统中的核心技术之一。本实训报告围绕基于计算机视觉的车道线识别与前车检测系统展开,旨在通过处理交通视频数据,实时检测车辆所在车道及其与前车的相对位置,从而为车道偏离预警和前车碰撞预警提供支持。
系统主要由车道线识别模块和前车检测模块构成。车道线识别通过使用图像处理与机器学习方法(如ACF检测器),检测车辆所在的车道及车道边界;前车检测则通过视频帧中的车辆定位框,结合车辆位置、速度等信息,判断前车的距离与运动状态。此外,系统还实现了基于鸟瞰图的车辆定位与车道标记识别,为车辆行驶安全提供有效保障。
实验结果表明,系统能够准确识别不同条件下的车道线及前车信息,具有较高的准确性和实时性,能够为自动驾驶系统提供关键的环境感知能力。本项目的研究与实现为智能驾驶领域中的车道保持与碰撞预警系统提供了有效的技术支持。
算法流程

运行效果
运行 main.m
图1:原始视频帧显示

内容:这是原始摄像头视角下的道路场景,呈现了自然环境中的车辆和车道。
细节:
(1)红色线条标注了左侧车道线。
(2)绿色方框表示检测到的前方车辆,并显示了车辆的位置(X=9.90, Y=1.62),单位可能为米。
(3)图像清晰地展示了道路、天空和周围环境,提供了基础数据供后续处理。
目的:展示原始视频数据和初步的车辆检测结果,提供输入图像。
图2:鸟瞰图原始分割:

内容:这是从普通摄像头视角转换到鸟瞰视角后的图像,车道线的初步分割结果。
细节:
(1)蓝色线条表示检测到的车道线特征。
(2)黄色方框标注了感兴趣区域(ROI),该区域用于进一步分析车道线。
(3)图像已经转为灰度格式,为后续处理提供简化的视觉信息。
目的:展示图像从摄像头视角到鸟瞰图的转换过程,以及初步的车道线分割结果。灰度图和ROI标注为后续的车道检测做准备。
图3:车道线拟合结果
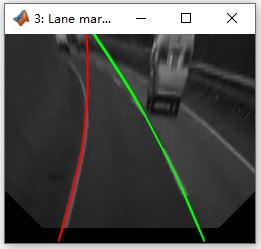
内容:同样是鸟瞰视角,展示了车道线的最终拟合结果。
细节:
(1)红色线条表示拟合后的左侧车道线。
(2)绿色线条表示拟合后的右侧车道线。
(3)图像展示了车道线拟合的最终结果,车道线已经被有效识别和标记。
目的:展示车道线拟合的精确结果,标示出车道的边界,帮助实现车辆定位和路径规划。
这三张图清晰地展示了整个车道检测和车辆定位系统的处理流程:
(1)原始图像采集和车辆检测:通过摄像头获取道路场景,检测到车辆并标注其位置。
(2)图像转换到鸟瞰视角并进行车道线特征提取:将原始图像转换为鸟瞰图,提取车道线的特征,并标记感兴趣区域。
(3)车道线拟合和最终结果标注:对车道线进行数学模型拟合,得到最终的车道边界,便于后续的驾驶决策。
系统成功实现的功能:
(1)准确的车辆检测和定位:通过边界框准确定位车辆的位置。
(2)稳定的车道线检测:从鸟瞰视角中检测到稳定的车道线特征。
(3)从普通视角到鸟瞰图的转换:实现了将图像从普通摄像头视角转换为鸟瞰视角的过程。
(4)车道线的数学模型拟合:通过拟合算法精确地表示车道线,提高车道检测的准确性。
通过这些步骤,系统能够实现精确的车道检测和车辆定位,为自动驾驶或辅助驾驶系统提供可靠的数据支持。
相关文章:
基于Matlab计算机视觉的车道线识别与前车检测系统研究
随着自动驾驶技术的发展,车道线识别和前车检测成为智能驾驶系统中的核心技术之一。本实训报告围绕基于计算机视觉的车道线识别与前车检测系统展开,旨在通过处理交通视频数据,实时检测车辆所在车道及其与前车的相对位置,从而为车道…...

模糊测试中常见的10种变异mutation策略
1. 引入 基于变异策略的模糊测试,有两个重点: (1)seed:种子,初始的合法输入序列。 (2)mutation:对已经存在的输入序列,进行微调。 所以,mutatio…...
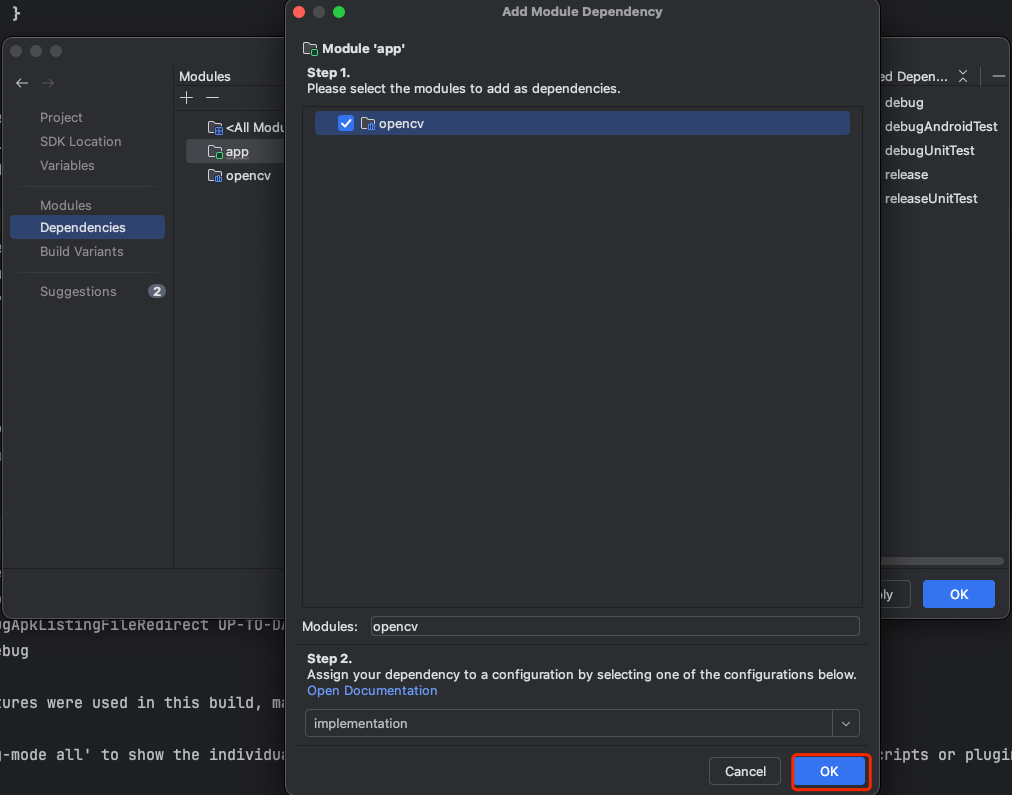
opencv-android编译遇到的相关问题处理
1、opencv-android sdk下载 下载地址:https://opencv.org/releases/ 下载安卓SDK即可 2、解压下载好的SDK 3、导入opencv的SDK到安卓项目中 导入步骤在/OpenCV-android-sdk/sdk/build.gradle文件的注释中写的非常详细,大家可安装官方给出的步骤导入。…...

把 py脚本生成windows 可执行的文件
1 确保生成的exe文件,不会立即退出 input("Please input any key to exit!")2 安装 PyInstaller 确保已经安装了 PyInstaller。可以使用 pip 来安装它: pip install pyinstaller3 执行命令 这里的 --onefile 选项表示将所有依赖项打包到一…...

云计算的发展历史与未来展望
云计算的起源与发展 云计算的概念最早可以追溯到20世纪60年代,当时的计算机科学家约翰麦卡锡(John McCarthy)提出了“按需提供计算能力”的构想。尽管这一理念在当时的技术条件下无法实现,但为云计算的未来发展奠定了理论基础。 …...

基于飞腾S2500处理器的全国产加固服务器
近日,西安康德航测电子科技有限公司凭借其深厚的行业底蕴和创新精神,正式推出了基于飞腾S2500处理器的全国产加固服务器。这一产品的问世,不仅标志着我国在信息技术领域的自立自强迈出了坚实的一步,更以其卓越的性能、坚固的设计和…...
gitlab-cicd部署安装与具体操作
一、安装 本例中是用安装包直接在ubuntu下安装的,也可以用docker镜像。 curl -LJO https://gitlab-runner-downloads.s3.amazonaws.com/latest/rpm/gitlab-runner_amd64.rpmrpm -i gitlab-runner_amd64.rpm 安装runner后,需要跟在runner所在服务器安装…...

2022高等代数上【南昌大学】
2022 高等代数 证明: p ( x ) p(x) p(x) 是不可约多项式的充要条件是对任意的多项式 f ( x ) , g ( x ) f(x), g(x) f(x),g(x),若 p ( x ) ∣ f ( x ) g ( x ) p(x) \mid f(x)g(x) p(x)∣f(x)g(x),则有 p ( x ) ∣ f ( x ) p(x) \mid f(x) p(x)∣f(x) 或 p ( x ) ∣ g (…...
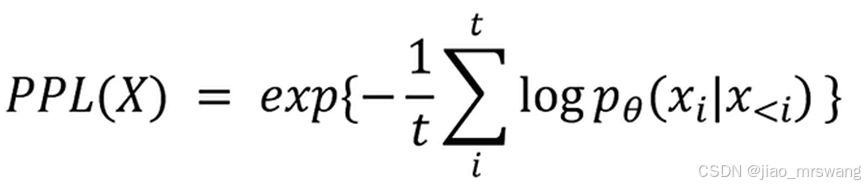
文本生成类(机器翻译)系统评估
在机器翻译任务中常用评价指标:BLEU、ROGUE、METEOR、PPL。 这些指标的缺点:只能反应模型输出是否类似于测试文本。 BLUE(Bilingual Evaluation Understudy):是用于评估模型生成的句子(candidate)和实际句子(referen…...
11.7【miniob】【debug】
这里的vector是实际值,而relation是指针,所以要解引用,*$1,并在最后调用其析构函数 emplace_back 和 push_back 都是用于在容器(如 std::vector)的末尾添加元素的方法,但它们的工作方式有所不同…...

OSHI 介绍与使用
OSHI 介绍 OSHI(Operating System and Hardware Information)是一个开源的Java库,用于从操作系统和硬件层面获取系统资源的详细信息。它提供了对操作系统、硬件、CPU、内存、磁盘、网络接口等多种信息的访问,且不依赖于平台特定的…...
Hadoop生态圈框架部署(八)- Hadoop高可用(HA)集群部署
文章目录 前言一、部署规划二、Hadoop HA集群部署(手动部署)1. 下载hadoop2. 上传安装包2. 解压hadoop安装包3. 配置hadoop配置文件3.1 虚拟机hadoop1修改hadoop配置文件3.1.1 修改 hadoop-env.sh 配置文件3.3.2 修改 core-site.xml 配置文件3.3.3 修改 …...
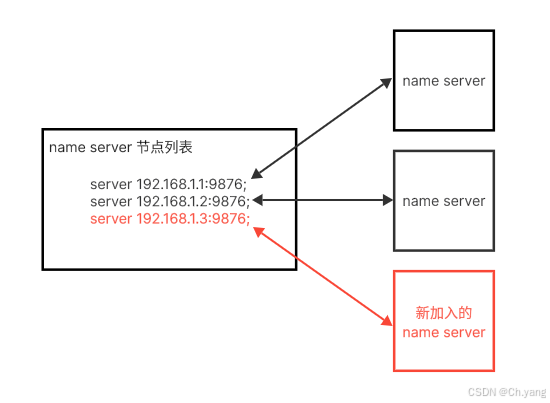
【RocketMQ】Name Server 无状态特点及如何让 Broker Consumer Producer 感知新节点
文章目录 前言1. Name Server 无状态特点2. Name Server 地址服务3. Name Server 手动配置后记 前言 看了 《RocketMQ 消息中间件实战派(上册)》前面一点,书中代码太多容易陷入细节。 这里简单描述下 RocketMQ Name Server 无状态表现在什么…...
蓝牙定位的MATLAB程序,四个锚点、三维空间
这段代码通过RSSI信号强度实现了在三维空间中的蓝牙定位,展示了如何使用锚点位置和测量的信号强度来估计未知点的位置。代码涉及信号衰减模型、距离计算和最小二乘法估计等基本概念,并通过三维可视化展示了真实位置与估计位置的关系。 目录 程序描述 运…...
机器学习--绪论
开启这一系列文章的初衷,是希望搭建一座通向机器学习世界的桥梁,为有志于探索这一领域的读者提供系统性指引和实践经验分享。随着人工智能和大数据技术的迅猛发展,机器学习已成为推动技术创新和社会变革的重要驱动力。从智能推荐系统到自然语…...
详解)
Unity 设计模式-命令模式(Command Pattern)详解
命令模式(Command Pattern)是一种行为型设计模式,它将请求封装成对象,从而使得可以使用不同的请求、队列或日志请求,以及支持可撤销的操作。命令模式通常包含四个主要角色:命令(Command…...

线程信号量 Linux环境 C语言实现
既可以解决多个同类共享资源的互斥问题,也可以解决简易的同步问题 头文件:#include <semaphore.h> 类型:sem_t 初始化:int sem_init(sem_t *sem, int pshared, unsigned int value); //程序中第一次对指定信号量调用p、v操…...
karmada-descheduler
descheduler规则 karmada-descheduler 定期检测所有部署,通常是每2分钟一次,并确定目标调度集群中无法调度的副本数量。它通过调用 karmada-scheduler-estimator 来完成这个过程。如果发现无法调度的副本,它将通过减少 spec.clusters 的配…...

【热门主题】000075 探索嵌入式硬件设计的奥秘
前言:哈喽,大家好,今天给大家分享一篇文章!并提供具体代码帮助大家深入理解,彻底掌握!创作不易,如果能帮助到大家或者给大家一些灵感和启发,欢迎收藏关注哦 💕 目录 【热…...

Android okhttp请求
下面是一个用 OkHttp 封装的 GET 请求方法,适用于 Android 项目。该方法包括基本的网络请求、错误处理,并支持通过回调返回结果。 封装 GET 请求的工具类 添加依赖 在你的 build.gradle 文件中,确保添加了 OkHttp 的依赖: imple…...

Unity地形草刷不上?根源是单顶点Mesh硬限制
1. 问题不是“刷不上去”,而是Unity地形系统对Mesh草的底层限制逻辑被误解了“Unity地形使用Mesh网格刷草刷不上”——这句话在Unity社区里每年至少被重复提问3000次以上。我第一次遇到它是在2019年做一款开放世界生存游戏时,美术同事把精心建模的蒲公英…...

微信聊天记录丢了怎么找回?这份教程很实用
你是否经历过这样的崩溃瞬间:手机清理空间时不小心删了微信聊天记录,或者重装微信后发现重要的对话全部消失?别慌,本文将系统梳理微信聊天记录丢失的常见原因,并提供多种经过验证的恢复方案,从微信官方自带…...

别再纠结Unity和Godot了!用Python写游戏,从零开始30分钟搞定你的第一个Ren`Py视觉小说
用Python写游戏:30分钟打造你的第一款RenPy视觉小说 当Python开发者想要涉足游戏创作时,往往会面临一个尴尬的选择:要么学习C#配合Unity,要么用GDScript适应Godot,这些额外的语言学习曲线常常让人望而却步。但鲜为人知…...

Vue-antd样式系统深度解析:从主题定制到组件样式覆盖的完整指南
Vue-antd样式系统深度解析:从主题定制到组件样式覆盖的完整指南 【免费下载链接】vue-antd Vue UI Component & Ant.Design 项目地址: https://gitcode.com/gh_mirrors/vu/vue-antd Vue-antd作为Ant Design的Vue实现,提供了一个强大而灵活的样…...

CANN/cannbot-skills Skill测试框架
Skill 测试框架 【免费下载链接】cannbot-skills CANNBot 是面向 CANN 开发的用于提升开发效率的系列智能体,本仓库为其提供可复用的 Skills 模块。 项目地址: https://gitcode.com/cann/cannbot-skills 基于变更文件识别受影响的 skills,执行对应…...

【Midjourney拟物化风格实战指南】:20年视觉设计专家亲授3大材质渲染公式与5步出图工作流
更多请点击: https://kaifayun.com 第一章:拟物化风格的本质与Midjourney语义解码 拟物化(Skeuomorphism)并非简单的视觉仿拟,而是一种通过材质、光影、物理反馈等多维语义锚点唤起用户认知惯性的交互范式。在AI图像生…...

linuxcnc开发环境搭建
linux cnc ,数控机床开源控制软件,实时系统。下载linuxcnc.iso镜像,在虚拟机里安装。安装成功运行起来。安装了amd64版本的qtcreator运行提示少libxcb:sudo apt update sudo apt install libxcb-cursor0打开窗口成功新建 一个工程…...

POLYGON Military资源包:军事仿真级3D资产的精度逻辑与战术应用
1. 这个资源包不是“拿来就能用”的万能钥匙,而是军事仿真级资产的起点你刚在Unity Asset Store页面看到POLYGON Military资源包封面——几辆写实风格的装甲车停在沙尘弥漫的战壕边,一个全副武装的士兵正蹲姿持枪警戒,远处是半坍塌的混凝土掩…...

深夜连上服务器,我再也不想敲命令行
前言 那是晚上十一点,我第五次输错IPtables规则,服务器直接失联了。赶紧给机房打电话,求助工程师帮忙重启。电话里听着对方说"下次小心点",我只能苦笑——命令行这东西,真不是熬夜能hold住的。 就在这时&a…...
:仅支持至2024年Q3 API v2退役前)
【限时开放】ElevenLabs波斯文语音调试秘钥包(含Persian SSML扩展标签库、RTL音频波形对齐工具、实时音素诊断CLI):仅支持至2024年Q3 API v2退役前
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs波斯文语音支持的演进与技术边界 ElevenLabs自2022年推出多语言TTS服务以来,波斯文(Farsi)长期处于实验性支持阶段。早期版本仅能通过自定义音色音素级微调…...