ORB-SLAM3源码学习:G2oTypes.cc: void EdgeInertial::computeError 计算预积分残差
前言
这部分函数涉及了g2o的内容以及IMU相关的推导内容,需要你先去进行这部分的学习。
1.函数声明
void EdgeInertial::computeError()2.函数定义
涉及到的IMU的公式:



{// TODO Maybe Reintegrate inertial measurments when difference between linearization point and current estimate is too big// 当线性化点与当前估计之间的差异过大时,可能需要重新积分惯性测量值。// 在父类中使用了using,故这里可以直接使用保护成员变量// 获取因子图的顶点const VertexPose* VP1 = static_cast<const VertexPose*>(_vertices[0]); //位姿Ticonst VertexVelocity* VV1= static_cast<const VertexVelocity*>(_vertices[1]); //速度viconst VertexGyroBias* VG1= static_cast<const VertexGyroBias*>(_vertices[2]); //零偏Bgiconst VertexAccBias* VA1= static_cast<const VertexAccBias*>(_vertices[3]); //零偏Baiconst VertexPose* VP2 = static_cast<const VertexPose*>(_vertices[4]); //位姿Tjconst VertexVelocity* VV2 = static_cast<const VertexVelocity*>(_vertices[5]); //速度vj// 获取IMU偏置的三个分量并计算预积分的增量// _estimate是类中的一个成员变量,表示该顶点的当前估计值。const IMU::Bias b1(VA1->estimate()[0],VA1->estimate()[1],VA1->estimate()[2],VG1->estimate()[0],VG1->estimate()[1],VG1->estimate()[2]);const Eigen::Matrix3d dR = mpInt->GetDeltaRotation(b1).cast<double>();const Eigen::Vector3d dV = mpInt->GetDeltaVelocity(b1).cast<double>();const Eigen::Vector3d dP = mpInt->GetDeltaPosition(b1).cast<double>();const Eigen::Vector3d er = LogSO3(dR.transpose()*VP1->estimate().Rwb.transpose()*VP2->estimate().Rwb);const Eigen::Vector3d ev = VP1->estimate().Rwb.transpose()*(VV2->estimate() - VV1->estimate() - g*dt) - dV;const Eigen::Vector3d ep = VP1->estimate().Rwb.transpose()*(VP2->estimate().twb - VP1->estimate().twb- VV1->estimate()*dt - g*dt*dt/2) - dP;_error << er, ev, ep;
}结束语
以上就是我学习到的内容,如果对您有帮助请多多支持我,如果哪里有问题欢迎大家在评论区积极讨论,我看到会及时回复。
相关文章:
ORB-SLAM3源码学习:G2oTypes.cc: void EdgeInertial::computeError 计算预积分残差
前言 这部分函数涉及了g2o的内容以及IMU相关的推导内容,需要你先去进行这部分的学习。 1.函数声明 void EdgeInertial::computeError() 2.函数定义 涉及到的IMU的公式: {// TODO Maybe Reintegrate inertial measurments when difference between …...

Unity协程机制详解
Unity的协程(Coroutine)是一种异步编程的机制,允许在多个帧之间分割代码的执行,而不阻塞主线程。与传统的多线程不同,Unity的协程在主线程中运行,并不会开启新的线程。 什么是协程? 协程是一种…...

2024年【高压电工】最新解析及高压电工考试总结
高压电工考试是电力行业从业人员必须通过的资格考试之一,它不仅检验了考生对高压电技术的掌握程度,还考验了考生在实际操作中的安全意识和应急处理能力。为了帮助广大考生更好地备考,本文整理了10道2024年高压电工考试的最新解析及总结试题&a…...

OELOVE 6.0城市列表模板
研究了好久OELOVE6.0源码,一直想将城市列表给单独整出来,做地区排名,但是PHP程序都是加密的,非常难搞,做二开都是要命的处理不了,在这里有一个简单方法可以处理城市列表,并且可以自定义TDK&…...

如何将你的 Ruby 应用程序从 OpenSearch 迁移到 Elasticsearch
作者:来自 Elastic Fernando Briano 将 Ruby 代码库从 OpenSearch 客户端迁移到 Elasticsearch 客户端的指南。 OpenSearch Ruby 客户端是从 7.x 版 Elasticsearch Ruby 客户端分叉而来的,因此代码库相对相似。这意味着当将 Ruby 代码库从 OpenSearch 迁…...

day1数据结构,关键字,内存空间存储与动态分区,释放
小练习 在堆区空间连续申请5个int类型大小空间,用来存放从终端输入的5个学生成绩,然后显示5个学生成绩,再将学生成绩升序排序,排序后,再次显示学生成绩。显示和排序分别用函数完成(两种排序方法࿰…...
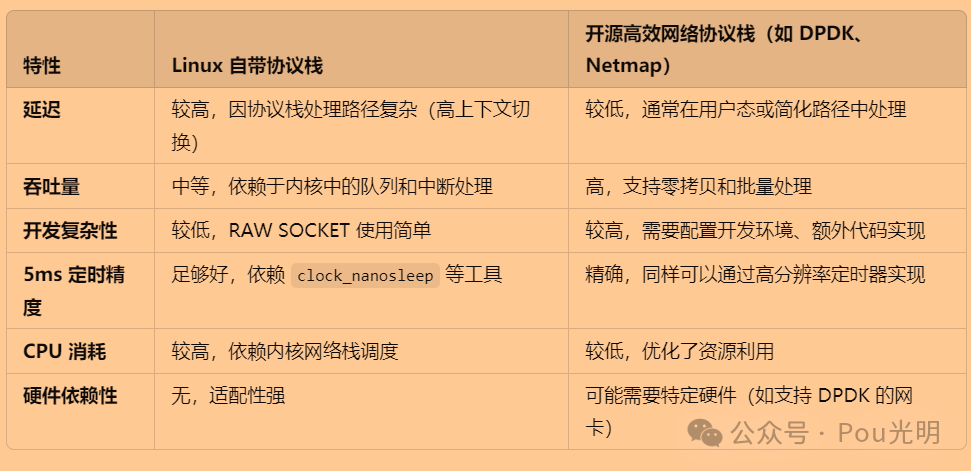
1_linux系统网络性能如何优化——几种开源网络协议栈比较
之前合集《计算机网络从入门到放弃》第一阶段算是已经完成了。都是理论,没有实操,让“程序猿”很难受,操作性不如 Modbus发送的报文何时等到应答和 tcp通信测试报告单1——connect和send。开始是想看linux内核网络协议栈的源码,然…...

【问题记录】07 MAC电脑,使用FileZilla(SFTP)连接堡垒机不成功
项目场景: 使用MAC电脑,以子账号(非root)的形式登录,连接堡垒机CLB(传统型负载均衡),使用FileZilla(SFTP)进行FTP文件传输。 问题描述: MAC电脑…...

前端报错npm ERR cb() never called问题
环境使用node版本v14.21.3,npm版本6.14.18 1.问题描述 1.1使用npm install后报错 npm ERR! cb() never called!npm ERR! This is an error with npm itself. Please report this error at: npm ERR! ? ? <https://npm.community>npm ERR! A complete log…...
康谋方案 | 多源相机数据采集与算法集成测试方案
目录 一、相机组成 二、多源相机采集与测试方案 三、应用案例分享 四、结语 在智能化技术快速发展当下,图像数据的采集与处理逐渐成为自动驾驶、工业等领域的一项关键技术。高质量的图像数据采集与算法集成测试都是确保系统性能和可靠性的关键。随着技术的不断进…...

Graspness 端到端抓取点估计 | 环境搭建 | 模型推理测试
在复杂场景中实现抓取检测,Graspness是一种端到端的方法; 输入点云数据,输出抓取角度、抓取深度、夹具宽度等信息。 开源地址:https://github.com/rhett-chen/graspness_implementation?tabreadme-ov-file 论文地址࿱…...
)
交换机是如何避免数据碰撞的(详细解释 + 示例)
交换机是如何避免数据碰撞的(详细解释 示例) 1. 独立冲突域 交换机的每个端口都形成一个独立的冲突域。这意味着通过交换机连接的每个设备都拥有自己的通信通道,互不干扰。 示例: 假设一个交换机有4个端口,分别连接…...

魅族手机刷官方系统
从魅族官网下载固件 https://flyme.cn/firmware.html 找到自己的型号,里面有历史版本、最新版,按照需求下载。 下载的是update.zip,改名就不能升级了 方法1 直接点击下载的update.zip包就可以升级。 方法2 将文件移动到文件管理的根目录&a…...

女人想要的,是那份懂她的情绪价值
女人想要的,是那份懂她的情绪价值 在情感的世界里,我们常常听到这样的声音:“我不需要你帮我解决问题,我只希望你能懂我。”这句话,简单却深刻,它揭示了女性在情感需求上的一个独特面向——她们渴望的&…...

[python SQLAlchemy数据库操作入门]-10.性能优化:提升 SQLAlchemy 在股票数据处理中的速度
哈喽,大家好,我是木头左! 当处理大量数据时,如股票数据,默认的ORM操作可能会显得效率低下。本文将探讨如何通过一些技巧和策略来优化SQLAlchemy ORM的性能,从而提升其在股票数据处理中的速度。 1. 选择合适的数据类型 在定义模型时,选择合适的数据类型对于性能至关重要…...

【网络取证篇】取证实战之PHP服务器镜像网站重构及绕密分析
【网络取证篇】取证实战之PHP服务器镜像网站重构及绕密分析 在裸聊敲诈、虚假理财诈骗案件类型中,犯罪分子为了能实现更低成本、更快部署应用的目的,其服务器架构多为常见的初始化网站架构,也称为站库同体服务器!也就是说网站应用…...

[python]使用 Pandas 处理 Excel 数据:分割与展开列操作
在数据处理的过程中,时常需要对 Excel 表格中的数据进行清洗与转换,下面介绍使用 Python 中的 Pandas 库对 Excel 文件中的数据进行操作,具体包括分割列、展开数据、清除空格以及格式转换等操作。 目标: 读取一个没有表头的 Exc…...

单片机的选择因素
在选择单片机型号时,需要根据具体的应用需求来选择合适的单片机。单片机(Microcontroller Unit, MCU)是一种将计算机的主要部分集成在一个芯片上的微型计算机,它通常包括处理器、存储器、输入/输出接口等。随着技术的发展…...

软件测试兼容性测试丨分布式测试与多设备管理
本文将从分布式测试的概念、重要性以及实施方法入手,紧接着探讨多设备管理的必要性和管理策略,最后分析其对软件测试行业的前景与影响。 分布式测试简介 什么是分布式测试? 分布式测试是指将测试任务分散到不同的计算机或者设备上进行&…...

Linux驱动开发(13):输入子系统–按键输入实验
计算机的输入设备繁多,有按键、鼠标、键盘、触摸屏、游戏手柄等等,Linux内核为了能够将所有的输入设备进行统一的管理, 设计了输入子系统。为上层应用提供了统一的抽象层,各个输入设备的驱动程序只需上报产生的输入事件即可。 下…...

10分钟快速上手:使用html-to-docx实现HTML到Word文档的无缝转换
10分钟快速上手:使用html-to-docx实现HTML到Word文档的无缝转换 【免费下载链接】html-to-docx HTML to DOCX converter 项目地址: https://gitcode.com/gh_mirrors/ht/html-to-docx 还在为网页内容无法完美转换为Word文档而烦恼吗?每次复制粘贴H…...

百度GEO优化是什么意思
这是很多国内企业主都会问的问题。因为在大多数人的认知中,“搜索百度”,所以一提到GEO,自然联想到百度。百度GEO优化,指的是在百度搜索引擎及其AI生态产品中,围绕百度AI生成的答案模块进行的品牌可见性优化。这包含两…...

5分钟搞定Windows风扇控制:Fan Control终极免费散热优化方案
5分钟搞定Windows风扇控制:Fan Control终极免费散热优化方案 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trend…...

在 Clean Core 约束下扩展 SAP S/4HANA 标准 OData API
我们正在做的事情很具体,S/4HANA 后端已经能够发布产品主数据相关的 Enterprise Event,事件经过 Integration Suite、Event Mesh、Advanced Event Mesh,再进入 Kafka Event Broker,消费系统按照 product type 订阅不同的 material event。链路跑通以后,业务方很快发现一个…...

Montserrat可变字体深度解析:实现响应式排版的最佳实践
Montserrat可变字体深度解析:实现响应式排版的最佳实践 【免费下载链接】Montserrat 项目地址: https://gitcode.com/gh_mirrors/mo/Montserrat Montserrat字体项目是一款源自布宜诺斯艾利斯传统街区的开源字体,以其独特的城市排版风格和灵活的可…...

3步解锁Beyond Compare 5专业版:Python密钥生成器终极指南
3步解锁Beyond Compare 5专业版:Python密钥生成器终极指南 【免费下载链接】BCompare_Keygen Keygen for BCompare 5 项目地址: https://gitcode.com/gh_mirrors/bc/BCompare_Keygen 还在为Beyond Compare 5的30天试用期而烦恼吗?想免费使用这款强…...

苹果M1/M2芯片跑自监督学习:统一内存与Metal后端实战指南
1. 项目概述:为什么苹果自研芯片正在悄悄改写AI训练的底层逻辑最近三个月,我陆续在三台不同配置的Mac上跑通了SimCLR、BYOL和MoCo v3这三套主流自监督学习(SSL)模型的完整训练流程——不是跑个demo,而是用ImageNet-1K子…...

Palantir 现在干的活,本质上就是你描述的那个方向,但它在“深度”和“广度”上比你目前的 MVP 设想走得更远。如果说你想做的是一个“能听懂人话的 SQL 查询工具”,那么 Palantir
Palantir 现在干的活,本质上就是你描述的那个方向,但它在“深度”和“广度”上比你目前的 MVP 设想走得更远。如果说你想做的是一个“能听懂人话的 SQL 查询工具”,那么 Palantir 构建的是一个 “企业级的数字孪生操作系统”。它不仅仅是在“…...

老旧小区门禁改造:业主权益与合规指引
一、费用来源与使用规范小区门禁改造并非全部由业主自费承担,可按合规渠道统筹资金,优先使用公共补贴与专项维修资金。资金使用优先级:政府老旧小区改造财政补贴>住宅专项维修资金>业主自筹财政补贴:老旧小…...
逻辑流中,判断操作符NULLOREMPTY的限制
问题描述: 逻辑流中,判断操作符NULLOREMPTY的限制 解决方案: NULLOREMPTY与NOTNULLOREMPTY都只能判断值是null或者空字符串,判断空对象不生效。建议如果是{}空对象,请使用java表达式去写判断条件。 比如下图:Busin…...