深度与视差的关系及其转换
深度与视差的关系及其转换
在计算机视觉和立体视觉中,深度和视差是两个重要的概念。理解这两者之间的关系对于实现立体图像处理、三维重建以及深度估计至关重要。在这篇博客中,我们将深入探讨深度和视差的概念,并介绍它们之间的转换关系。
什么是视差?
视差(Disparity)是指在立体视觉中,同一个物体在左右两个相机图像中位置的差异。由于两台相机拍摄同一个物体时,摄像头的位置稍有不同(即相机之间有一定的基线),因此同一个物体在两个图像中的位置会发生偏移。这种偏移量,称为视差。
视差值通常是通过左右图像对中的匹配算法计算得到的,匹配过程中会确定左右图像中对应点的位置差异。视差值越大,物体离相机越近;视差值越小,物体离相机越远。
什么是深度?
深度(Depth)是指物体与相机之间的实际距离。在立体视觉中,深度可以通过测量视差来估算。通过视差,我们可以反推出物体与相机之间的空间关系,即物体的深度信息。
深度信息在许多计算机视觉应用中都很重要,例如三维重建、目标识别和增强现实等。为了获得准确的深度信息,需要结合相机的内外部参数,如焦距和基线。
视差与深度的转换关系
在立体视觉中,深度和视差之间的关系是基于三角测量原理的。给定两个相机的视角,物体的深度可以通过视差计算出来。公式如下:
Z = f ⋅ B d Z = \frac{f \cdot B}{d} Z=df⋅B
其中:
- ( Z ) 是物体的深度,表示物体到相机的实际距离。
- ( f ) 是相机的焦距,通常以像素为单位。
- ( B ) 是相机基线,表示左右相机之间的实际距离。
- ( d ) 是视差,表示左右图像中同一点的水平坐标差。
变量解析
-
焦距 ( f ):相机的焦距决定了相机成像的放大能力,焦距越长,图像中的物体越大。焦距越长,深度感知越好,但也可能导致视差变小。
-
基线 ( B ):基线是指两台相机之间的实际距离。基线越长,视差越大,深度估计越准确。在实际应用中,通常希望基线尽可能大,以获得更清晰的深度信息。
-
视差 ( d ):视差是左右图像中同一点位置的差异。视差越大,物体越靠近相机;视差越小,物体越远。视差值通过立体匹配算法计算得到。
-
深度 ( Z ):深度表示物体与相机之间的实际距离。根据视差值、焦距和基线,可以通过公式计算出深度信息。
视差与深度的关系
- 视差越大,物体离相机越近。这是因为较大的视差值意味着左右图像中物体的位置差异较大,说明物体距离相机较近,深度值较小。
- 视差越小,物体越远。较小的视差值表示物体在左右图像中的位置差异较小,意味着物体离相机较远,深度值较大。
因此,通过计算视差,结合相机的焦距和基线参数,我们可以准确地估算出物体的深度信息。
视差与深度的计算示例
假设我们有以下参数:
- 相机的焦距 ( f = 1000 ) 像素
- 相机基线 ( B = 0.1 ) 米
- 视差 ( d = 50 ) 像素
根据视差与深度的转换公式:
Z = f ⋅ B d = 1000 × 0.1 50 = 2 米 Z = \frac{f \cdot B}{d} = \frac{1000 \times 0.1}{50} = 2 \text{ 米} Z=df⋅B=501000×0.1=2 米
因此,物体到相机的深度为 2 米。
应用场景
视差和深度的关系在许多领域中都有广泛应用,尤其在立体视觉和三维重建中尤为重要。以下是一些常见的应用场景:
- 立体图像处理:通过左右图像计算视差,进而获得深度信息。利用这些深度信息,可以重建场景的三维结构。
- 三维重建:利用多个视角拍摄的图像,可以通过计算视差来生成场景的三维模型。深度图可以为每个像素点提供与相机的距离。
- 增强现实(AR):通过获取场景的深度信息,增强现实系统能够更好地将虚拟物体与现实场景进行融合。
- 自动驾驶:自动驾驶车辆通常配备多台相机,用于获取周围环境的三维深度信息,以进行路径规划和障碍物检测。
总结
深度和视差是计算机视觉中的重要概念,二者之间的关系可以通过简单的数学公式来转换。视差反映了左右图像中物体位置的差异,而深度则表示物体与相机之间的实际距离。通过立体视觉算法,我们可以从视差中提取深度信息,并应用于多种视觉任务,包括三维重建、目标识别和增强现实等。
理解视差与深度的转换关系,是实现高效、准确的三维重建和深度估计的基础。这不仅对于计算机视觉领域的研究人员非常重要,也对许多实际应用(如自动驾驶、机器人导航等)至关重要。
相关文章:

深度与视差的关系及其转换
深度与视差的关系及其转换 在计算机视觉和立体视觉中,深度和视差是两个重要的概念。理解这两者之间的关系对于实现立体图像处理、三维重建以及深度估计至关重要。在这篇博客中,我们将深入探讨深度和视差的概念,并介绍它们之间的转换关系。 …...

安全见闻全解析
跟随 泷羽sec团队学习 声明! 学习视频来自B站up主 泷羽sec 有兴趣的师傅可以关注一下,如涉及侵权马上删除文章,笔记只是方便各位师傅的学习和探讨,文章所提到的网站以及内容,只做学习交流,其他均与本人以及…...

搭建Tomcat(四)---Servlet容器
目录 引入 Servlet容器 一、优化MyTomcat ①先将MyTomcat的main函数搬过来: ②将getClass()函数搬过来 ③创建容器 ④连接ServletConfigMapping和MyTomcat 连接: ⑤完整的ServletConfigMapping和MyTomcat方法: a.ServletConfigMappin…...

PT2044A 单触控单输出IC
1 产品概述 ● PT2044A 是一款单通道触摸检测芯片。该芯片内建稳压电路,提供稳定电压给触摸感应电路使用。同时内部集成高效完善的触摸检测算法,使得芯片具有稳定的触摸检测效果。该芯片专为取代传统按键而设计,具有宽工作电压与低功耗的特性…...

docker安装mysql5.7
1、宿主机创建映射目录 mkdir -p /data/mysql/log mkdir -p /data/mysql/data mkdir -p /data/mysql/conf这里我放在了/data/mysql目录下 2、拉取mysql镜像 docker pull mysql:5.7注意是5.7版本,如果是8版本操作会略有不同,下篇文章介绍安装8版本的操…...
安卓 文件管理相关功能记录
文件管理细分为图片、视频、音乐、文件四类 目录 权限 静态声明权限 动态检查和声明权限方法 如何开始上述动态申请的流程 提示 图片 获取图片文件的对象列表 展示 删除 视频 获取视频文件的对象列表 获取视频file列表 按日期装载视频文件列表 展示 播放 删除…...

GB28181系列三:GB28181流媒体服务器ZLMediaKit
我的音视频/流媒体开源项目(github) GB28181系列目录 目录 一、ZLMediaKit介绍 二、 ZLMediaKit安装、运行(Ubuntu) 1、安装 2、运行 3、配置 三、ZLMediaKit使用 一、ZLMediaKit介绍 ZLMediaKit是一个基于C11的高性能运营级流媒体服务框架,项目地址…...

ScottPlot学习的常用笔记
ScottPlot学习的常用笔记 写在前面版本的选择第一个障碍:版本问题。 ScottPlot4.0的官方网站与示例官方起始页cookbook5.0Demo4.1 demo以4.1为例,解压和运行如下: 下载源代码和编译先说结论: 写在前面 之前调研的TraceCompass&am…...

二、mapbox-gl实现白膜立体建筑
有时候我们只有二维的面数据,怎么实现类似高德地图中的白膜立体建筑呢?在mapbox-gl中很容易实现,具体如下。 要在Vue中结合Mapbox显示自定义的GeoJSON数据,并实现建筑物的白膜效果,我们需要执行以下步骤: …...

mybatisplus 分库查询
mybatisplus 分库查询 比如我们的项目有两个数据库 不同的表在不同的库 我们是可以使用mybatisplus来实现 首选引入pom <dependency><groupId>com.baomidou</groupId><artifactId>dynamic-datasource-spring-boot-starter</artifactId><vers…...

计算属性 (vue3)
二 实例 1route.query.type...

RabbitMQ 安装、配置和使用介绍 使用前端js直接调用方式
1. 安装 RabbitMQ 1.1 安装 Erlang RabbitMQ 是基于 Erlang 语言开发的,因此首先需要安装 Erlang。 在 Ubuntu 上安装 Erlang: bash sudo apt-get update sudo apt-get install erlang 在 CentOS 上安装 Erlang: bash sudo yum insta…...

电脑显示器选购指南2024
选择显示器是五花八门的显示参数,如何选择,以下给出参数说明,及部分参考: 1. 尺寸和分辨率 尺寸(英寸) 根据使用距离和用途选择合适的屏幕尺寸: 21-24 英寸:适合小桌面空间、日常…...
vue2中如何实现自定义指令
实现自动聚焦功能 1.不用自定义指令 使用生命周期钩子mounted 2.使用自定义指令 1. 使用全局组件 首先在main.js中注册 然后在组件中直接使用v-指令名 2. 使用局部注册 局部注册和全局注册类似 如果很多组件需要自定义,建议使用自定义指令注册在全局...
QT从入门到精通(一)——Qlabel介绍与使用
1. QT介绍——代码测试 Qt 是一个跨平台的应用程序开发框架,广泛用于开发图形用户界面(GUI)应用程序,也支持非图形应用程序的开发。Qt 提供了一套工具和库,使得开发者能够高效地构建高性能、可移植的应用程序。以下是…...

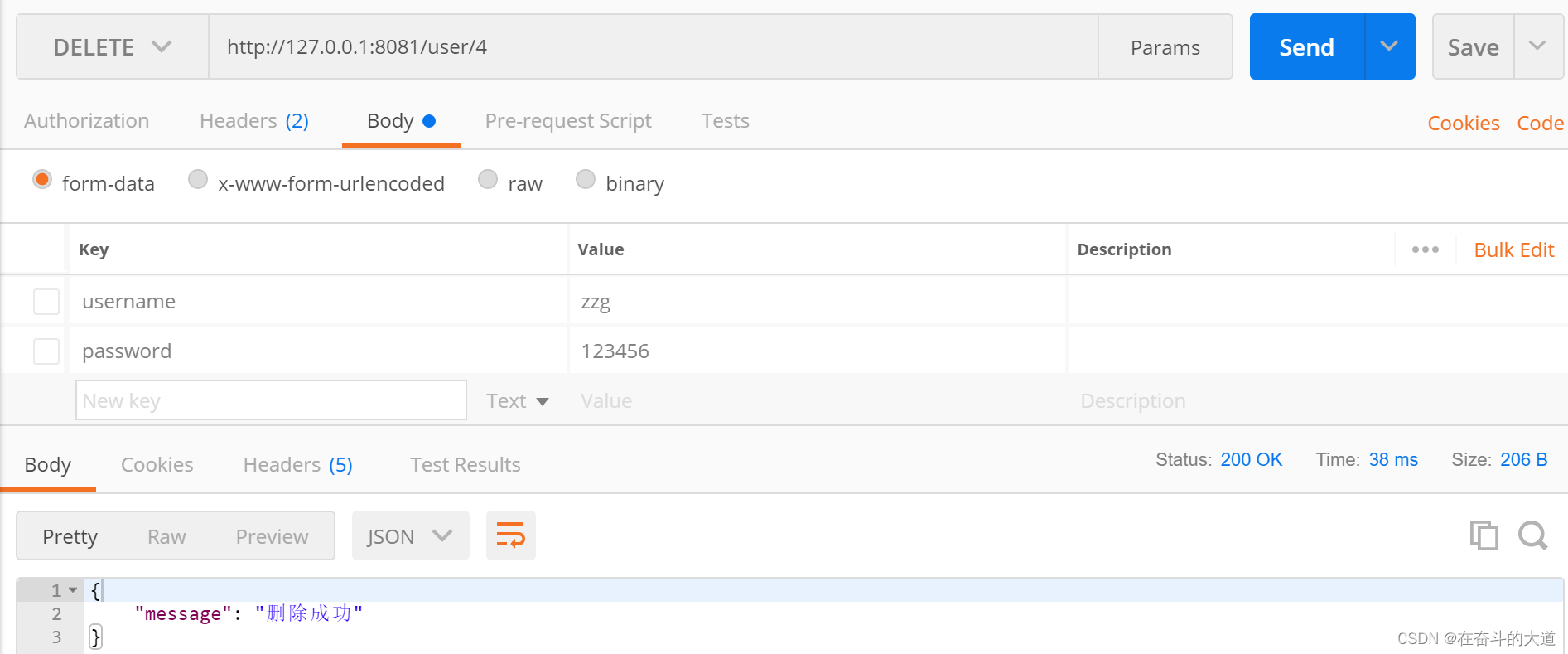
【jpa】springboot使用jpa示例
目录 1. 请求示例2. pom依赖3. application.yaml4.controller5. service6. repository7. 实体8. 启动类 1. 请求示例 curl --location --request POST http://127.0.0.1:8080/user \ --header User-Agent: Apifox/1.0.0 (https://apifox.com) \ --header Content-Type: applic…...
Python Flask Web框架快速入门
Flask 入门Demo Flask 开发环境搭建,执行如下指令: pip install flask# 第一节: Flask 快速入门from flask import Flask app Flask(__name__)app.route(/flask) def hello_flask():return Hello Flaskapp.run()核心代码剖析: 从flask包导…...
ansible自动化运维(五)roles角色管理
目录 Roles角色管理 创建nginx的角色目录 定义任务配置文件: 定义jinjia2模板: 定义nginx yml文件 检查语法,执行命令 检验结果: Roles角色管理 角色(roles)是ansible自1.2版本开始引入的新特性&…...
前端学习一
一 进程与线程 线程是进程执行的最小单位,进程是系统分配任务的最小单位。 一个进程可执行最少一个线程。线程分为子线程和主线程。 主线程关闭则子线程关闭。 二 浏览器进程 浏览器是多进程多线程应用。 进程包括: 浏览器进程 负责程序交互渲染…...

【OSS】php使用oss存储
阿里云oss官方文档:文档 1、前期工作 创建阿里云账号,登录创建bucket,注意修改权限,要不然可能读取不到 申请accessKeyId和accessKeySecret accessKey 2、项目中安装OSS扩展 composer require aliyuncs/oss-sdk-php3、基础使…...

大学生论文降重技巧:用AI辅助,重复率轻松降到10%以下
2026年AI学术辅助工具已进入“精准合规改写、核心语义完整保留”的全新发展阶段,彻底解决了大学生论文降重“耗时长、改写生硬、易踩学术红线”的普遍难题。据中国高校图书馆协会2026年调研数据显示,超7成大学生在论文写作过程中会遇到重复率超标的问题&…...

万象视界灵坛实操手册:使用Prometheus+Grafana监控CLIP推理延迟、GPU利用率、QPS指标
万象视界灵坛实操手册:使用PrometheusGrafana监控CLIP推理延迟、GPU利用率、QPS指标 1. 监控系统概述 在现代AI应用部署中,实时监控系统性能指标是确保服务稳定运行的关键。对于万象视界灵坛这样的多模态智能感知平台,我们需要重点关注三个…...

什么是模型存储
模型存储的理解 模型存储是指将训练好的机器学习模型保存到磁盘,以便后续直接使用而无需重新训练。 为什么需要模型存储? # 没有模型存储:每次使用都要重新训练 model train_model(data) # 可能需要几小时 prediction model.predict(ne…...

SEO 和网站推广有什么区别_如何判断一个网站的 SEO 质量
SEO 和网站推广有什么区别 在数字营销的广阔天地中,SEO(搜索引擎优化)和网站推广是两个常被提及的概念。它们虽然都旨在提升网站的流量和知名度,但实际上,它们之间有着显著的区别。理解这两者的异同,对于有…...

golang.org/x/net WebSocket开发完全手册:实现实时双向通信
golang.org/x/net WebSocket开发完全手册:实现实时双向通信 【免费下载链接】net [mirror] Go supplementary network libraries 项目地址: https://gitcode.com/gh_mirrors/ne/net 在现代Web应用开发中,实时双向通信已成为提升用户体验的关键技术…...

3 个高级思路,让你的 AI 绘画 / 视频从此充满想象力
前言 如今 AI 视频与绘画工具的画质越来越卷,清晰度、光影、细节几乎都已触达天花板。但真正能让人记住、能脱颖而出的作品,靠的从来不是画质,而是想象力。 当所有人都在追求 “大片感” 时,你只需要换一种思路 ——用创意打破平…...

基于Cadence 617的带隙基准电压源设计:从理论推导到仿真验证
1. 带隙基准电压源设计基础 第一次接触带隙基准电压源设计时,我被这个看似简单的电路难住了。基准电压源就像电子系统中的"定海神针",无论温度如何变化,它都能提供稳定的参考电压。在模拟IC设计中,带隙基准(Bandgap Ref…...

RC滤波器设计实战:从基础到高阶应用
1. RC滤波器设计基础与核心概念在嵌入式系统设计中,信号滤波是每个硬件工程师必须掌握的核心技能。我从业十余年处理过无数传感器信号,发现90%的噪声问题都可以通过合理设计的RC滤波器解决。与动辄使用运放或DSP方案相比,无源RC滤波器以极低成…...

基于合法无代码平台滥用的新型钓鱼攻击机理与防御体系研究
摘要 2026 年 3 月卡巴斯基实验室披露针对 Bubble.io 等正规无代码开发平台的恶意滥用钓鱼攻击,攻击者依托平台高信誉域名、SSL 证书与可视化开发能力,快速生成高仿真钓鱼页面,绕过传统邮件网关与终端检测,实现账号凭证、多因素认…...

OpenClaw性能优化:Qwen3.5-9B-AWQ-4bit的AWQ量化效果实测
OpenClaw性能优化:Qwen3.5-9B-AWQ-4bit的AWQ量化效果实测 1. 为什么需要量化模型? 当我第一次在OpenClaw中尝试接入Qwen3.5-9B模型时,就遇到了一个现实问题:我的MacBook Pro风扇开始疯狂转动,内存占用直接飙升到16GB…...