通过解调使用正则化相位跟踪技术进行相位解包裹
1. 绪论
光学计量学通常使用光学干涉仪来测量各种物理量。1,2 根据应用的不同,可以使用多种类型的干涉仪,但它们的共同目标是产生一个由被测物理量调制的条纹图案。使用这种光束编码程序可以检测到的物理量范围非常广:深度测量、应变分析、温度梯度、表面变形等等。
干涉图可以用以下数学表达式表示:
I ( x , y ) = a ( x , y ) + b ( x , y ) c o s [ p h i ( x , y ) ] + n ( x , y ) ( 1 ) \\I(x, y)=a(x, y)+b(x, y) cos [phi(x, y)]+n(x, y)(1) I(x,y)=a(x,y)+b(x,y)cos[phi(x,y)]+n(x,y)(1)
其中 a ( x , y ) a(x, y) a(x,y) 是缓慢变化的背景照明, b ( x , y ) b(x, y) b(x,y) 是幅度调制,它也是一个低频信号, ϕ ( x , y ) \phi(x, y) ϕ(x,y) 是与被测物理量相关的相位项。项 n ( x , y ) n(x, y) n(x,y) 是一个加性噪声,尽管它也可能是乘性的,就像电子散斑干涉测量法 (ESPI) 的情况一样。然后将连续干涉图在 CCD 摄像机上成像,并使用视频帧抓取器数字化,以便在数字计算机中进行进一步分析。计算机辅助条纹分析的目的是自动检测干涉图上发生的二维相位变化 ϕ ( x , y ) \phi(x, y) ϕ(x,y),这是由于被测物理量的空间变化引起的。
有许多技术可以用来测量有趣的空间相位变化 p h i ( x , y ) \\phi(x, y) phi(x,y)。其中,我们可以提到相位步进干涉测量法 (PSI),3,4 它至少需要三个相位步进干涉图。干涉图之间的相位差必须在整个干涉图中已知。在这种情况下,可以估计每个可分辨图像像素的调制相位。当干涉仪的大气湍流和机械条件在获得三个相位步进干涉图所需的时间内保持恒定,PSI 是首选技术。当上述要求无法满足时,如果将载波条纹引入条纹图案以获得载波频率干涉图,则可以仅分析一个干涉图。然后可以使用诸如傅里叶变换、5 同步、6,7 空间相位偏移、8-11 相位锁定环路 (PLL)、12,13 等等这些众所周知的技术来分析该干涉图。
除了 PLL 技术外,所有其他方法(傅里叶变换、同步、PSI 和空间相位偏移)都会给出检测到的相位包裹(真实相位的模 2 π 2 \pi 2π),因为相位估计过程中涉及反正切函数。包裹相位和非包裹相位之间的关系可以表示为:
ϕ ( x , y ) = ϕ W ( x , y ) + 2 π k ( x , y ) , ( 2 ) \phi(x, y)=\phi_{W}(x, y)+2 \pi k(x, y), (2) ϕ(x,y)=ϕW(x,y)+2πk(x,y),(2)
其中 ϕ ( x , y ) \phi(x, y) ϕ(x,y) 是非包裹相位, ϕ W ( x , y ) \phi_{W}(x, y) ϕW(x,y) 是包裹相位, k ( x , y ) k(x, y) k(x,y) 是一个整数值校正场。对于从高质量条纹数据计算出的相位图,解包裹问题很简单;在这些相位图中,水平和垂直方向上相邻相位样本之间的绝对相位差小于 π,除了预期的 2 π 2 \pi 2π 不连续点。因此,解包裹是一个简单的问题,即在遇到的每个不连续点上添加或减去 2 π 2 \pi 2π 偏移量,14,15 或者对包裹相位差进行积分。16,17
当相邻像素之间的绝对相位差在反正切函数的不连续点以外的点大于 π 时,解包裹变得更加困难。这些不连续点可能是由高频、高幅度噪声、相位跳跃不连续和条纹图案中的区域欠采样引入的。Ghiglia 等人 18 考虑通过在开始解包裹过程之前隔离这些错误的不连续点来解包裹相位。当围绕大小为 L 的正方形路径的包裹相位差之和不等于零时,就会检测到错误的不连续点或相位不一致。不一致会产生相位误差(意外相位跳跃),这些误差会沿着解包裹方向(在顺序解包裹中)传播。因此,解包裹过程变得依赖于路径,即,根据所选的解包裹方向,可能会获得不同的解包裹相位场。
Ghiglia 等人 17 通过应用 Fried19 和 Hudgin20 的相位梯度最小二乘积分 21-23 的思想,为获得鲁棒的路径无关相位解包裹器迈出了重要的一步。参考文献 17 中所需的相位梯度是作为包裹估计相位的 x 和 y 方向上的包裹相位差获得的。然后对这个包裹的梯度场进行最小二乘积分,以获得所寻找的连续相位。最近,Marroquin 等人 24,25 通过在所寻找的解中添加一个正则化项,以势能范数的形式来扩展包裹相位梯度最小二乘积分技术。当使用这种技术时,可以滤除解包裹相位中的一些噪声,以及对无效相位数据(如孔洞)进行插值,这些数据在内部具有明确的行为。
最小二乘积分 17 或其正则化扩展 25 的一个缺点是假设相邻像素之间的相位差小于 π 的绝对值。也就是说,这些技术将包裹相位的包裹差视为真实梯度场。不幸的是,当解包裹严重噪声的相位图时,情况并非如此。这里获得的相位梯度实际上是在高噪声和高相位梯度区域中包裹的。这是在 ESPI 中遇到的非常嘈杂的情况,其中可能存在如此大量的噪声,以至于相邻像素之间的相位差可能大于 π 弧度,而不是预期的 2 π 2 \pi 2π 跳跃。
这里提出的解包裹系统可以看作是先前报道的 PLL 系统的推广。12,13 正则化相位跟踪 (RPT) 系统在估计相位中具有明显更高的信噪比,相对于傅里叶变换、同步或 PSI 技术而言。原因是 RPT 系统的行为类似于一个极窄带通滤波器,跟踪宽带条纹图案信号。迄今为止,RPT 系统已在多个不同应用中得到报道,26-28 范围从单个闭合条纹干涉图的解调到 PSI。在所有这些应用中,RPT 技术已被证明比以前众所周知的干涉测量技术 3-18 对噪声更鲁棒,并且对条纹图案边界不敏感。
所提出的 RPT 方法的一个优点是它在干涉图边缘没有相位失真。当干涉图中存在无效条纹数据区域(如阴影和孔洞)时,这一点特别有用。当使用 ESPI 分析机械零件中的应变时,这是一个常见的情况。但是,这里提出的 RPT 技术仅限于解调平滑波前。也就是说,我们没有考虑分段连续函数的解调。
然而,Servin 等人 26 已经将类似的 RPT 技术应用于直接解包裹相位图(无需生成两个中间条纹图案);这里介绍的 RPT 更易于理解,并且对噪声更鲁棒。
2. 使用正则化相位跟踪技术的解调解包裹
如上所述,使用这里提出的技术解包裹给定相位图的第一步是将包裹相位转换为两个相位偏移的条纹图案。我们可以通过使用被解包裹的相位图的余弦和正弦来获得这些条纹图案,即:
I C ( x , y ) = c o s [ ϕ W ( x , y ) ] , I S ( x , y ) = s i n [ ϕ W ( x , y ) ] , \begin{aligned} I_{C}(x, y) &= cos[\phi_{W}(x, y)], \\ I_{S}(x, y) &= sin[\phi_{W}(x, y)], \end{aligned} IC(x,y)IS(x,y)=cos[ϕW(x,y)],=sin[ϕW(x,y)], (3)
其中 ϕ W ( x , y ) \phi_{W}(x, y) ϕW(x,y) 是被解包裹的相位图。
现在,解包裹问题可以看作是使用 RPT 技术 28 对两个相位偏移的条纹图案进行解调。现在,我们概述 RPT 技术的基本原理,该技术用于解调-解包裹这些相位偏移的条纹图案。
鉴于所提出的技术使用正则化相位跟踪器,我们简要解释对相位估计问题进行正则化的动机。为了在条纹分析中正则化相位检测问题,有必要找到一个合适的能量或成本函数,该函数至少使用两个有助于约束估计相位场的项。这些项与以下内容相关:
(1) 估计函数与观测值之间的保真度。
(2) 调制相位场的平滑度。
然后,我们假设所寻找的相位函数是使成本函数最小化的函数。
特别是在这里提出的解包裹 RPT 技术中,我们假设局部条纹图案 [公式 (3)] 可以被认为是空间单色的,因此它们的辐照度可以被建模为一个在相位空间中由平面调制的余弦函数。该余弦函数的幅度必须接近观测到的辐照度 [陈述 (1)]。这样的相位平面必须适应条纹图案中的每个区域,因为它的局部频率在二维空间中连续变化。所提出的成本函数的第二项指的是预期解包裹检测相位的平滑度和连续性 [陈述 (2)]。具体来说,所提出的成本函数,由解包裹相位 ϕ 0 ( x , y ) \phi_{0}(x, y) ϕ0(x,y) 在每个位置 ( x , y ) (x, y) (x,y) 处最小化,是:

其中 L 是一个具有有效条纹数据(良好的幅度调制)的二维格点, N x , y N_{x, y} Nx,y 是围绕坐标 ( x , y ) (x, y) (x,y) 的邻域区域,其中正在解包裹相位, m ( x , y ) m(x, y) m(x,y) 是一个指示场,如果位置 ( x , y ) (x, y) (x,y) 已经被解包裹,则等于 1,否则等于 0。函数 ω x ( x , y ) \omega_{x}(x, y) ωx(x,y) 和 ω y ( x , y ) \omega_{y}(x, y) ωy(x,y) 是沿 x 和 y 方向估计的局部频率。最后,λ 是一个正则化参数,它与 N x , y N_{x, y} Nx,y 的大小一起控制检测到的解包裹相位的平滑度。
公式 (4) 中的前两项试图使局部条纹模型在最小二乘意义上尽可能接近邻域 N x , y N_{x, y} Nx,y 中的观测到的辐照度 [陈述 (1)]。第三项在仅使用由 m ( x , y ) m(x, y) m(x,y) 标记的先前检测到的像素时,强制执行平滑度和连续性的假设 [陈述 (2)]。换句话说,第三项强化了这样一个事实,即解包裹的相位值 ϕ 0 ( x , y ) \phi_{0}(x, y) ϕ0(x,y) 必须在最小二乘意义上尽可能接近邻域 N x , y N_{x, y} Nx,y 中的适应相位平面 p ( x , y , ϵ , e t a ) p(x, y, \epsilon, \\eta) p(x,y,ϵ,eta)。还要注意,局部相位平面同时适应观测数据(通过其余弦和正弦模型)以及由 m ( x , y ) m(x, y) m(x,y) 标记的已经估计的相位值 ϕ 0 ( x , y ) \phi_{0}(x, y) ϕ0(x,y)。这样做是为了找到与观测到的条纹辐照度相兼容的最平滑相位。
为了解调-解包裹由公式 (3) 给出的条纹图案,我们必须找到成本函数 U ( x , y ) U(x, y) U(x,y) 关于场 ϕ 0 ( x , y ) \phi_{0}(x, y) ϕ0(x,y)、 ω x ( x , y ) \omega_{x}(x, y) ωx(x,y) 和 ω y ( x , y ) \omega_{y}(x, y) ωy(x,y) 的最小值。为此,我们提出了一种解调算法,该算法通过以下顺序方式优化每个 L 中的 U ( x , y ) U(x, y) U(x,y),然后获得我们所谓的第一个全局解包裹相位估计。
对 L 上的第一个全局解包裹相位估计的执行方式如下:首先,将指示函数 m ( x , y ) m(x, y) m(x,y) 设置为零 [ m ( x , y ) = 0 在 L 中 ] [m(x, y)=0 在 L 中] [m(x,y)=0在L中]。然后选择一个种子或起点 ( x 0 , y 0 ) (x_{0}, y_{0}) (x0,y0) 在 L 内部,开始对条纹图案进行解调。然后,函数 U ( x 0 , y 0 ) U(x_{0}, y_{0}) U(x0,y0) 关于 ϕ 0 ( x 0 , y 0 ) \phi_{0}(x_{0}, y_{0}) ϕ0(x0,y0)、 ω x ( x 0 , y 0 ) \omega_{x}(x_{0}, y_{0}) ωx(x0,y0)、 ω y ( x 0 , y 0 ) \omega_{y}(x_{0}, y_{0}) ωy(x0,y0) 进行优化。已访问的位置被标记为已解包裹;也就是说,我们将 m ( x 0 , y 0 ) m(x_{0}, y_{0}) m(x0,y0) 设置为 1。一旦种子像素被解包裹,顺序相位解包裹将按以下步骤进行:
- 选择 L 内部的 ( x , y ) (x, y) (x,y) 像素(随机或以预定的扫描顺序)。
- 如果 m ( x , y ) = 1 m(x, y)=1 m(x,y)=1,则返回第一个语句。如果 m ( x , y ) = 0 m(x, y)=0 m(x,y)=0,则测试以确定 m ( x ′ , y ′ ) = 1 m(x', y')=1 m(x′,y′)=1 是否适用于任何相邻像素 ( x ′ , y ′ ) (x', y') (x′,y′)。如果没有任何相邻像素已被估计,则返回第一个语句。如果 m ( x ′ , y ′ ) = 1 m(x', y')=1 m(x′,y′)=1 适用于相邻像素,则将 [ ϕ 0 ( x ′ , y ′ ) [\phi_{0}(x', y') [ϕ0(x′,y′)、 ω x ( x ′ , y ′ ) \omega_{x}(x', y') ωx(x′,y′)、 ω y ( x ′ , y ′ ) ] \omega_{y}(x', y')] ωy(x′,y′)] 作为初始条件来最小化 U ( x , y ) U(x, y) U(x,y) 关于 [ ϕ 0 ( x , y ) [\phi_{0}(x, y) [ϕ0(x,y)、 ω x ( x , y ) \omega_{x}(x, y) ωx(x,y)、 ω y ( x , y ) ] \omega_{y}(x, y)] ωy(x,y)]。
- 设置 m ( x , y ) = 1 m(x, y)=1 m(x,y)=1。
- 返回第一个语句,直到 L 中的所有像素都被估计出来。
直观地理解第一个迭代的另一种方式是将其视为一个晶体生长 (CG) 过程,其中新的分子以最小化局部晶体能量的特定方向添加到主体中,该方向由相邻和先前定位的分子决定。在图 1 中,我们可以看到一个关于先前定义的二维区域的空间分布的特定示例,在这些区域中,当我们选择特定的顺序扫描时,条纹图案正在被解调。

为了优化位置 ( x , y ) (x, y) (x,y) 处的 U ( x , y ) U(x, y) U(x,y) 关于 ( ϕ 0 (\phi_{0} (ϕ0、 ω x \omega_{x} ωx、 ω y ) \omega_{y}) ωy),我们使用了一个简单的梯度下降:

其中 τ = 0.05 \tau=0.05 τ=0.05 是步长,k 是迭代次数。通常只需要公式 (6) 中的两次迭代(除了对起始种子点的解调,这可能需要大约 10 次迭代)。这是因为公式 (6) 中的初始条件是从一个邻域解包裹像素中获取的,因此初始条件已经非常接近公式 (4) 的稳定点。在实践中,公式 (6) 中第一个关系中的 τ 参数可以乘以大约 10 来加速梯度搜索的收敛速度。
第一个全局相位估计 [当公式 (6) 与 CG 算法一起使用时] 通常非常接近实际的调制相位;如果需要,可以执行额外的全局迭代来改进解包裹过程。可以执行额外的迭代,再次使用公式 (6),但现在将优化后的三元组 ( ϕ 0 (\phi_{0} (ϕ0、 ω x \omega_{x} ωx、 ω y ) \omega_{y}) ωy) 作为同一位置 ( x , y ) (x, y) (x,y) 的初始条件(而不是像在第一个全局 CG 迭代中那样在邻域位置)。请注意,对于额外的解包裹迭代,公式 (4) 中的指示函数 m ( x , y ) m(x, y) m(x,y) 现在在 L 中等于 1。因此,只要 L 中的所有位置在每次全局迭代中都被访问,就可以以任何所需的顺序扫描格点。在实践中
仅需要三到四次额外的全局迭代才能在二维格点 L 中的每个位置 ( x , y ) (x, y) (x,y) 处达到 U ( x , y ) U(x, y) U(x,y) 的稳定最小值。
为了方便起见,我们可以评论一下成本函数 U ( x , y ) U(x, y) U(x,y),它是在先前关于解包裹的研究中提出的,其中使用了 RPT 系统。26 我们使用了以下形式的成本函数:

其中 V ( x ) = [ x − 2 π i n t ( x / π ) ] 2 V(x)=[x-2 \pi int(x / \pi)]^{2} V(x)=[x−2πint(x/π)]2, i n t ( y ) int(y) int(y) 取 y 的整数部分。公式 (7) 中的所有其他变量和函数与为公式 (4) 定义的变量和函数相同。如参考文献 26 中所示,用于优化公式 (7) 的顺序技术与本文中使用的技术相同。公式 (7) 相对于公式 (4) 的两个主要缺点是,包装运算符 V ( ⋅ ) V(·) V(⋅) 不如公式 (4) 中的 sin(.) 和 cos(.) 函数那样容易相对于三元组 ( ϕ 0 (\phi_{0} (ϕ0、 ω x \omega_{x} ωx、 ω y ) \omega_{y}) ωy) 推导出来,而且计算机模拟表明,从公式 (4) 推导出的优化系统(RPT 系统)比从公式 (7) 推导出的优化系统对噪声更鲁棒。关于从公式 (4) 推导出的 RPT 系统的噪声鲁棒性更高的一个假设可能是由于使用了两个数据场, I C ( x , y ) I_{C}(x, y) IC(x,y) 和 I S ( x , y ) I_{S}(x, y) IS(x,y)。[鉴于公式 (6) 中给出的 RPT 动态系统的非线性,对这一点进行数学证明可能非常困难]。在公式 (6) 中给出的 RPT 动态系统中,我们保留了与 RPT 系统 26-28 通常相关的相同边缘鲁棒性。
3. 讨论
现在我们可以给出该 RPT 解包裹系统的频域解释。在 CG 算法中,由于从估计的三元组 ( ϕ 0 , ω x , ω y ) (\phi_{0}, \omega_{x}, \omega_{y}) (ϕ0,ωx,ωy)(来自一个相邻检测到的像素)获得梯度搜索系统的初始条件,使得 RPT 系统寻找与观测到的辐照度相兼容的最平滑调制相位。在频域中,RPT 解包裹技术可以被解释为一个窄带通自适应滤波器,跟踪相位偏移干涉图的瞬时相位和频率。被检测到的信号的频谱可能比跟踪 RPT 检测滤波器宽得多。该窄带通相位跟踪系统具有很大的惯性,因此它可以平滑地移动到条纹图案的二维频谱中。具有自适应窄带通滤波器跟踪更宽信号频谱的另一个优点是检测到的相位的信噪比有很大提高。换句话说,使用窄带通相位跟踪系统,在解调可能具有明显更宽频谱的信号时,该系统具有自适应窄带通滤波器的噪声抑制能力。解包裹相位中的信噪比增益是众所周知的,并且在现在广泛使用的电信中,相位跟踪系统通常被使用。
最后,正如我们在第 4 和 5 节中看到的那样,RPT 技术对边界边缘效应几乎不敏感,这在标准相位移技术中是一个严重的缺点,在这些技术中,在实践中必须对条纹图案使用卷积低通滤波器来滤除一些相位噪声。

如上所述,参数 λ 和邻域 N x , y N_{x, y} Nx,y 的大小与检测到的相位的带宽以及 RPT 算法的鲁棒性相关。例如,对于非常嘈杂的条纹图案, N x , y N_{x, y} Nx,y 的大小应该很大,以便 RPT 系统能够跟踪平滑的调制相位,并忽略快速变化的噪声。如果邻域 N x , y N_{x, y} Nx,y 的大小太小,系统可能会被相位噪声困住。换句话说, N x , y N_{x, y} Nx,y 的大小与要恢复的预期相位的尺度以及噪声量有关。另一方面,一旦 N x , y N_{x, y} Nx,y 的大小被选择,公式 (4) 中 λ 参数的值就不那么重要了。在整个过程中使用了 λ = 1 \lambda=1 λ=1。这里给出了计算机模拟和实验结果。RPT 技术的计算速度与邻域 N x , y N_{x, y} Nx,y 的大小和格点 L 的大小成线性关系。在所呈现的实验中, N x , y N_{x, y} Nx,y 的大小范围从 9 × 9 到 17 × 17 像素。
就像在 CG 过程中一样,RPT 技术的第一次迭代非常关键。如果它成功,第一次 RPT 迭代将使整个解包裹系统移动到正确的吸引子,因此进一步的细化计算(计算额外的全局迭代)将使估计的相位仅略微移动。如果 RPT 系统到达错误的吸引子,RPT 系统将被困在该局部最小值中,并且进一步的迭代可能无法将系统拉出来。在这种情况下,可能需要尝试另一个邻域大小 N x , y N_{x, y} Nx,y 来达到所需的吸引子。
4. 计算机模拟
我们进行了一次计算机模拟,将这里提出的 RPT 解包裹器与众所周知的相位解包裹技术(即包裹相位差的最小二乘积分)进行比较。18 图 2 展示了一个无噪声的计算机生成的包裹相位 p h i ( x , y ) \\phi(x, y) phi(x,y)。我们向该相位添加了范围在 (0.0, 1.55) 弧度内的白噪声和均匀分布的随机噪声。使用该噪声相位,我们生成了三个相位偏移的条纹图案,如下所示:


我们使用 128 × 128 个像素,每个像素有 256 个灰度级来计算这些条纹图案。对噪声条纹图案进行了 3 × 3 卷积平均器进行低通滤波。此外,对 3 × 3 平均器进行了三次卷积,并与相位偏移的





条纹图案 [公式 (8)] 进行卷积。进行低通滤波是为了从三个可用的条纹图案中获得最佳的相位估计,方法是使用最小二乘解包裹技术。得到的条纹图案如图 3 所示。然后,使用以下公式估计这些条纹图案的调制相位:

其中运算符 L P F [ ⋅ ] L P F[\cdot] LPF[⋅] 表示低通滤波过程。然后使用包裹相位差的最小二乘积分对该包裹相位进行解包裹,结果如图 4 所示。如上所述,对解包裹的相位进行了重新包裹,以便与图 2 中显示的真实调制相位进行比较。我们可以看到真实相位的动态范围显著地
下降了。这种下降是由于在严重噪声的情况下,包裹差运算符是真实相位梯度的糟糕估计器,因为高噪声会导致一些相位差出现在 ( − π , π ) (-\pi, \pi) (−π,π) 弧度范围之外,因此包裹运算符将给出错误的相位梯度。我们尝试了使用 3 × 3 平均器低通滤波器对公式 (8) 中的条纹图案进行不同次数的卷积,但发现估计的解包裹相位在所有情况下都更差。

另一方面,我们使用这里提出的 RPT 解包裹方法对由以下公式给出的噪声包裹相位进行了测试:

正如我们所看到的,这次我们没有使用低通滤波过程,因为我们的技术以这种方式效果更好。这里提出的 RPT 解包裹器得到的解包裹相位(再次重新包裹以用于比较目的)如图 5 所示。正如图 5 所示,这里提出的 RPT 解包裹器在很大程度上保留了真实相位的动态范围。对于第一个全局 CG 迭代,使用了 11 × 11 个像素的邻域 N x , y N_{x, y} Nx,y。随后,需要三次全局迭代来改进估计的解包裹相位。如上所述,在应用 RPT 解包裹器之前,不需要对条纹图案进行低通滤波。这是一个优点,因为我们不必担心低通滤波器的最佳通带以平滑条纹图案。
第五章是关于实验结果的。
5. 实验结果
图 6 展示了一组三幅相位偏移的电子散斑干涉图。ESPI 图像采用减法 ESPI 模式从一块边缘夹紧的铝板上获得。该板用一个放置在它后部表面的烙铁头加热。这些干涉图之间的相位偏移是 p i / 2 \\pi / 2 pi/2 弧度。我们使用以下三步公式来获得图 7 中所示的相位图:
ϕ W ( x , y ) = a r c t a n [ I 1 ( x , y ) − I 3 ( x , y ) 2 I 2 ( x , y ) − I 1 ( x , y ) − I 3 ( x , y ) ] , ( 11 ) \phi_{W}(x, y)=arctan \left[\frac{I_{1}(x, y)-I_{3}(x, y)}{2 I_{2}(x, y)-I_{1}(x, y)-I_{3}(x, y)}\right], \quad(11) ϕW(x,y)=arctan[2I2(x,y)−I1(x,y)−I3(x,y)I1(x,y)−I3(x,y)],(11)
其中 ϕ W ( x , y ) \phi_{W}(x, y) ϕW(x,y) 代表估计的包裹相位图。
图 8(a) 和 8(b) 展示了公式 (11) 中给出的包裹相位的正弦和余弦条纹图案。这些条纹图案是输入到公式 (6) 中所示的 RPT 解包裹系统中的,没有任何预处理。图 9 展示了解包裹的相位(重新包裹以与图 6 中的条纹图案进行比较),该相位是使用这里提出的 RPT 解包裹技术获得的。图 10 展示了检测到的解包裹相位的网格图。对于第一个全局 CG 迭代,使用了 5 × 5 个像素的邻域 N x , y N_{x, y} Nx,y。随后,使用了四次全局迭代来改进估计的解包裹相位。获得图 9 中所示的解包裹相位所需的计算时间约为 1 分钟,使用的是 180 MHz 的奔腾-Pro 机器。

图 10. 图 9 中所示的解包裹相位的网格图。
相关文章:
通过解调使用正则化相位跟踪技术进行相位解包裹
1. 绪论 光学计量学通常使用光学干涉仪来测量各种物理量。1,2 根据应用的不同,可以使用多种类型的干涉仪,但它们的共同目标是产生一个由被测物理量调制的条纹图案。使用这种光束编码程序可以检测到的物理量范围非常广:深度测量、应变分析、温…...

VMware替代 | 双一流大学采用ZStack ZSphere虚拟化平台加速医学应用算法分析
某双一流大学医学部在面对日益增长的医学应用算法分析需求时,选择采用ZStack ZSphere虚拟化平台,以满足其高性能计算和GPU业务应用的迫切需求。该平台凭借其轻量化、卓越性能及易用性,成功解决了医学部在虚拟化及GPU应用场景中的挑战。随着平…...

UNIAPP框架uView初步集成与开发设计
uView UI,是uni-app生态最优秀的UI框架,全面的组件和便捷的工具会让您信手拈来,如鱼得水。本文章分享UNIAPP集成使用uView页面动态开发设计。 一、使用HBuilder X 直接导入插件,下载后重启 uView - DCloud 插件市场 二、配置样…...

C05S08-LVS负载均衡
一、LVS 1. LVS概述 LVS(Linux Virtual Server、Linux虚拟服务)是一种基于Linux系统集群的负载均衡方案,属于四层的负载均衡。 集群:将相同组件部署在不同的服务器上,提供统一的服务,以及同样的功能&…...
C 语言代码诗韵:数字功能的雅集华章
函数基本操作练习 主要内容: 本任务主要练习函数的申请、定义、调用等,主要包含以下功能: 1)编写函数,输入一个整数,求各个数字之和; 2)编写函数,计算1!2&…...

ps案例制作
宣传海报 暖色调海报商品展示图...

【C++】列表初始化、声明、范围for、array容器
列表初始化、声明、范围for、array容器 一、统一的列表初始化1.1 使用{ }初始化1.2 initializer_list容器 二、声明2.1 auto关键字2.2 decltype关键字2.3 nullptr关键字 三、范围for四、array容器和forward_list容器 一、统一的列表初始化 1.1 使用{ }初始化 在C98中…...

C++智能指针详解
一、智能指针简介 智能指针是一个类似于指针的类,将指针交给这个类对象进行管理,我们就可以像使用指针一样使用这个类,并且它会自动释放资源。 智能指针运用了 RAII 的思想(资源获得即初始化)。RAII 是指,用对象的生命周期来管理资…...

基础库正则表达式
我们已经可以用requests 库来获取网页的源代码,得到 HTML 代码。但我们真正想要的数据是包含在 HTML代码之中的,要怎样才能从 HTML,代码中获取想要的信息呢?正则表达式就是其中一个有效的方法。 本篇博客我们将了解一下正则表达式的相关用法。正则表达…...

【spring专题】spring如何解析配置类和扫描包路径
文章目录 目标重要的组件加载配置类启动解析组件定位配置类解析配置类 扫描过程总结 目标 这是我们使用注解方式启动spring容器的核心代码 AnnotationConfigApplicationContext applicationContext new AnnotationConfigApplicationContext(MyConfig.class); User user (Us…...

MyBatis框架的入门
目录 MyBatis第一章:框架的概述1. MyBatis框架的概述 第二章:MyBatis的入门程序1. 创建数据库和表结构2. MyBatis的入门步骤 MyBatis 第一章:框架的概述 1. MyBatis框架的概述 MyBatis是一个优秀的基于Java的持久层框架,内部对…...
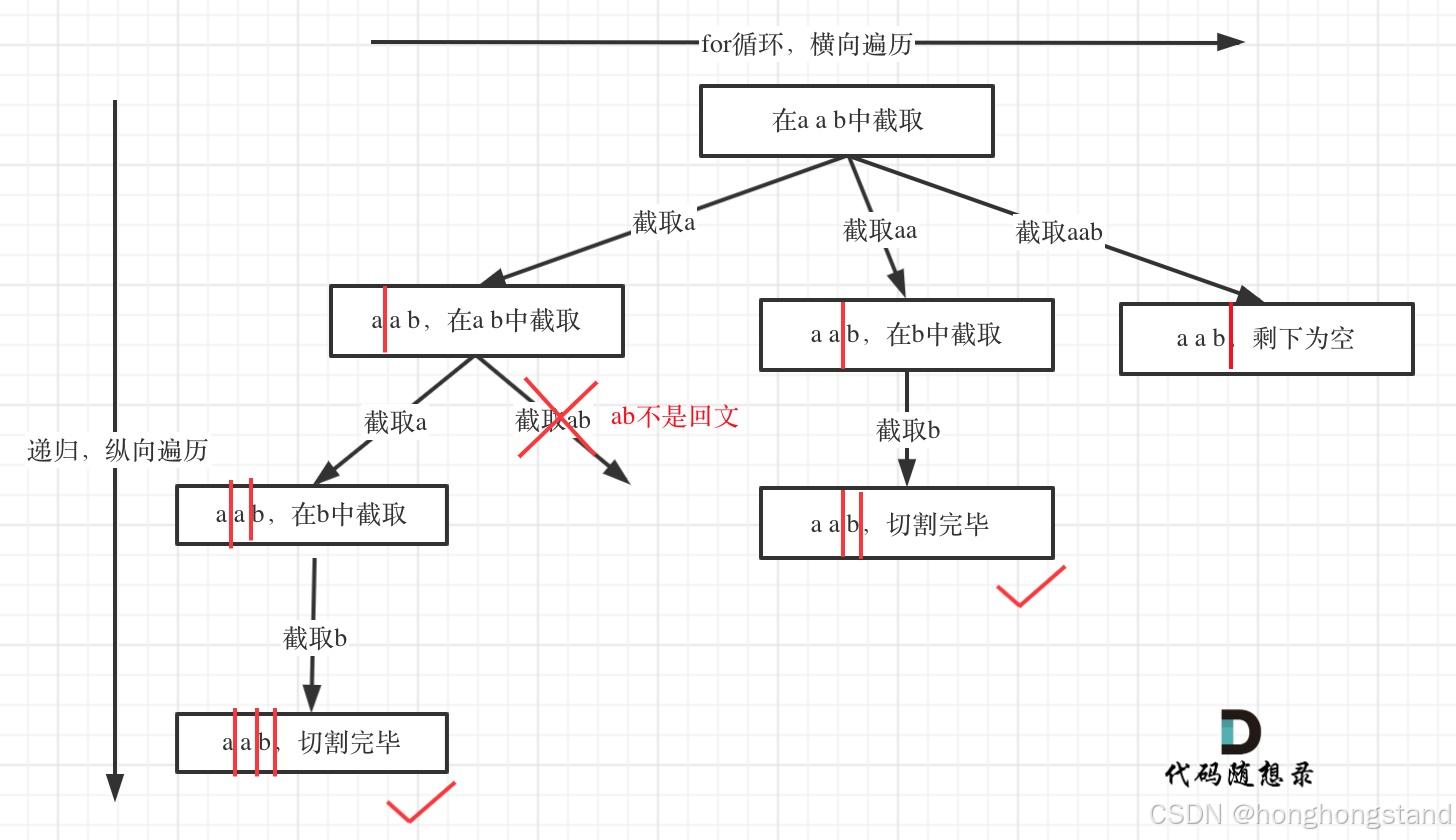
代码随想录D22-23 回溯算法01-02 Python
理论回顾 回溯法也可以叫做回溯搜索法,它是一种搜索的方式。回溯是递归的副产品,只要有递归就会有回溯。 回溯的本质是穷举,穷举所有可能,然后选出我们想要的答案,如果想让回溯法高效一些,可以加一些剪枝…...

【网络云计算】2024第50周-每日【2024/12/13】小测-理论-写10个Bash Shell脚本-解析
文章目录 1. 计算1到100的和2. 列出当前目录下所有文件和文件夹3. 检查文件是否存在4. 备份文件到指定目录(简单示例)5. 打印系统当前日期和时间6. 统计文件中的行数7. 批量重命名文件(将.txt后缀改为.bak)8. 查找进程并杀死&…...
FFT 和 IFFT 的缩放因子)
MATLAB转换C语言--问题(一)FFT 和 IFFT 的缩放因子
1. MATLAB 中的 FFT 和 IFFT 在 MATLAB 中,fft 和 ifft 函数具有以下缩放行为: fft:执行快速傅里叶变换(FFT),不进行缩放。ifft:执行逆快速傅里叶变换(IFFT),…...

轻松上手:使用 Vercel 部署 HTML 页面教程
😀 在学习前端的过程中,部署项目往往是一个令人头疼的问题。然而,Vercel 为我们提供了一个便捷且免费的解决方案。 Vercel 是一个强大的云平台,专门用于前端项目的部署和托管。它不仅支持多种前端框架和静态网站生成器࿰…...

如何运用 HTM?
一、HTM 概述 HTM(Hierarchical Temporal Memory,分层时序记忆)是一种基于神经科学原理构建的计算模型,旨在模拟大脑的学习和记忆机制,以处理复杂的时间序列数据和模式识别任务。它具有独特的架构和算法,能…...
12.16【net】【study】
路由表是路由器或者其他互联网网络设备上存储的一张表,它记录了到达特定网络目的地的路径。路由表中的每一行(即一个路由条目)包含了目的地网络地址、子网掩码、下一跳地址、出接口等信息。 Destinations(目的地)和 R…...

2023和2024历年美赛数学建模赛题,算法模型分析!
文末获取历年优秀论文解析,可交流解答 2023年题目分析 MCM(Mathematical Contest in Modeling) 问题 A:遭受旱灾的植物群落 概述:要求建立预测模型,模拟植物群落在干旱和降水充裕条件下随时间的变化。类…...

Node.js内置模块
1.内置模块 Node.js的中文网参考手册:https://nodejs.cn//api 帮助文档 API文档:查看对应的模块,左边是模块,右边是模块的成员 源码:https://github.com/nodejs/node/tree/main/lib 查看 例如: http.js 创建web服务器的模块 -->进入源码中,搜索…...

测评|携程集团25年社招在线测评北森题库、真题分析、考试攻略
携程集团社招入职测评北森题库主要考察以下几个方面: 1. **言语理解**:这部分主要测试应聘者运用语言文字进行思考和交流、迅速准确地理解和把握文段要旨的能力。 2. **资料分析**:包括文字题和图表题,考察应聘者快速找出关键信息…...

libiec61850开源库核心功能完全实战指南:从协议解析到电力系统通信应用
libiec61850开源库核心功能完全实战指南:从协议解析到电力系统通信应用 【免费下载链接】libiec61850 Official repository for libIEC61850, the open-source library for the IEC 61850 protocols 项目地址: https://gitcode.com/gh_mirrors/li/libiec61850 …...

泉盛UV-K5/K6固件自定义:解锁专业对讲机功能的终极指南
泉盛UV-K5/K6固件自定义:解锁专业对讲机功能的终极指南 【免费下载链接】uv-k5-firmware-custom 全功能泉盛UV-K5/K6固件 Quansheng UV-K5/K6 Firmware 项目地址: https://gitcode.com/gh_mirrors/uvk5f/uv-k5-firmware-custom 你是否曾想过,一台…...

全志Tiger-ISP调试工具安装与使用全攻略
1. 全志Tiger-ISP调试工具入门指南 第一次接触全志Tiger-ISP调试工具时,我也是一头雾水。这个工具主要用于图像信号处理器(ISP)的调试和优化,是开发智能摄像头、行车记录仪等视觉设备的必备利器。简单来说,它能让你像调色师一样精细调整图像的…...
)
YOLOv8实战:从数据增强到模型部署的完整Pipeline(附代码)
YOLOv8实战:从数据增强到模型部署的完整Pipeline(附代码) 计算机视觉领域的目标检测技术近年来取得了显著进展,其中YOLO系列算法因其高效性和准确性备受关注。作为该系列的最新成员,YOLOv8在保持实时检测速度的同时&am…...

ENVI实战:利用传感器波谱响应函数实现光谱曲线精准重采样
1. 为什么需要光谱重采样? 在遥感数据分析中,我们经常会遇到一个头疼的问题:不同传感器采集的光谱数据分辨率不一致。比如实验室用光谱仪测量的叶片反射率可能有上千个波段,而Landsat-8卫星只能获取11个波段的数据。这就好比用高清…...

如何验证Qwen3-4B部署效果?MMLU基准测试实战指南
如何验证Qwen3-4B部署效果?MMLU基准测试实战指南 1. 为什么需要验证模型效果? 当你成功部署了Qwen3-4B模型后,最关心的问题肯定是:这个模型到底表现如何?能不能满足我的需求?这时候就需要一个客观的评估方…...

Spring_couplet_generation 构建RESTful API最佳实践
Spring_couplet_generation 构建RESTful API最佳实践 最近在做一个挺有意思的小项目,想把一个春联生成模型包装成服务,方便其他应用调用。这让我重新思考了如何把一个AI模型能力,通过API的方式,既规范又稳定地提供出去。相信不少…...
)
Java函数计算迁移避坑清单:12个被官方文档隐瞒的关键限制(含Classloader隔离失效实录)
第一章:Java函数计算迁移避坑清单:12个被官方文档隐瞒的关键限制(含Classloader隔离失效实录)Java函数计算(如阿里云FC、AWS Lambda Java Runtime)在迁移传统Spring Boot应用时,常因底层沙箱机制…...

4个维度解析YetAnotherKeyDisplayer:开源实时按键可视化工具全指南
4个维度解析YetAnotherKeyDisplayer:开源实时按键可视化工具全指南 【免费下载链接】YetAnotherKeyDisplayer The application for displaying pressed keys of the keyboard 项目地址: https://gitcode.com/gh_mirrors/ye/YetAnotherKeyDisplayer YetAnothe…...

实战指南:如何快速解决WebApi在IIS部署中的HTTP 500.19配置错误
1. 遇到HTTP 500.19错误时先别慌 第一次把WebApi部署到IIS服务器就遇到HTTP 500.19错误,相信很多开发者都会心头一紧。这个错误通常伴随着"配置数据无效"的提示,看起来挺吓人,但实际上解决起来并不复杂。我刚开始接触IIS部署时也踩…...