OpenCV(python)从入门到精通——运算操作
- 加法减法操作
import cv2 as cv
import numpy as npx = np.uint8([250])
y = np.uint8([10])x_1 = np.uint8([10])
y_1 = np.uint8([20])# 加法,相加最大只能为255
print(cv.add(x,y))# 减法,相互减最小值只能为0
print(cv.subtract(x_1,y_1))
- 图像加法

import cv2 as cv
import numpy as npimg1 = cv.imread("./images/1.jpg")img2 = cv.imread("./images/1_test.jpg")img = cv.add(img1,img2)cv.imshow("pic",img)
cv.waitKey(0)

- 图像权重相加,因为我使用的都是同一张图片
import cv2 as cv
import numpy as npimg1 = cv.imread("./images/1.jpg")img2 = cv.imread("./images/1_test.jpg")# img = cv.add(img1,img2)
img = cv.addWeighted(img1,0.5,img2,0.8,gamma=0)
cv.imshow("pic",img)
cv.waitKey(0)

- 按位与操作
import cv2 as cv
import numpy as npimg1 = cv.imread("./images/1.jpg")img2 = cv.imread("./images/1_test.jpg")# img = cv.add(img1,img2)
# img = cv.addWeighted(img1,0.5,img2,0.8,gamma=0)
rows,cols,channels = img2.shape
roi = img1[0:rows,0:cols]
img2gray = cv.cvtColor(img2,cv.COLOR_BGR2GRAY)
ret,mask = cv.threshold(img2gray,10,255,cv.THRESH_BINARY|cv.THRESH_OTSU)
mask_inv = cv.bitwise_not(mask)img1_bg = cv.bitwise_and(roi,roi,mask=mask_inv)
cv.imshow("img1_bg",img1_bg)
cv.waitKey(0)
- 按位取反操作
import cv2 as cv
import numpy as npimg1 = cv.imread("./images/1.jpg")img2 = cv.imread("./images/1_test.jpg")# img = cv.add(img1,img2)
# img = cv.addWeighted(img1,0.5,img2,0.8,gamma=0)
rows,cols,channels = img2.shape
roi = img1[0:rows,0:cols]
img2gray = cv.cvtColor(img2,cv.COLOR_BGR2GRAY)
ret,mask = cv.threshold(img2gray,10,255,cv.THRESH_BINARY|cv.THRESH_OTSU)
mask_inv = cv.bitwise_not(mask)img1_bg = cv.bitwise_not(roi,roi,mask=mask_inv)
cv.imshow("img1_bg",img1_bg)
cv.waitKey(0)
- 按位或
import cv2 as cv
import numpy as npimg1 = cv.imread("./images/1.jpg")img2 = cv.imread("./images/1_test.jpg")# img = cv.add(img1,img2)
# img = cv.addWeighted(img1,0.5,img2,0.8,gamma=0)
rows,cols,channels = img2.shape
roi = img1[0:rows,0:cols]
img2gray = cv.cvtColor(img2,cv.COLOR_BGR2GRAY)
ret,mask = cv.threshold(img2gray,10,255,cv.THRESH_BINARY|cv.THRESH_OTSU)
cv.imshow("img3",roi)
cv.imshow("img1",mask)
mask_inv = cv.bitwise_not(mask)img1_bg = cv.bitwise_or(roi,roi,mask=mask_inv)
cv.imshow("img1_bg",img1_bg)
cv.waitKey(0)
- 按位异或
import cv2 as cv
import numpy as npimg1 = cv.imread("./images/1.jpg")img2 = cv.imread("./images/1_test.jpg")# img = cv.add(img1,img2)
# img = cv.addWeighted(img1,0.5,img2,0.8,gamma=0)
rows,cols,channels = img2.shape
roi = img1[0:rows,0:cols]
img2gray = cv.cvtColor(img2,cv.COLOR_BGR2GRAY)
ret,mask = cv.threshold(img2gray,10,255,cv.THRESH_BINARY|cv.THRESH_OTSU)
cv.imshow("img3",roi)
cv.imshow("img1",mask)
mask_inv = cv.bitwise_xor(mask,mask)img1_bg = cv.bitwise_or(roi,roi,mask=mask_inv)
cv.imshow("img1_bg",img1_bg)
cv.waitKey(0)相关文章:
OpenCV(python)从入门到精通——运算操作
加法减法操作 import cv2 as cv import numpy as npx np.uint8([250]) y np.uint8([10])x_1 np.uint8([10]) y_1 np.uint8([20])# 加法,相加最大只能为255 print(cv.add(x,y))# 减法,相互减最小值只能为0 print(cv.subtract(x_1,y_1))图像加法 import cv2 as…...

基础2:值类型与右值引用
1.函数返回 在讲解右值之前,要知道下面这个函数要进行几次拷贝以及为什么? int get_x() {int x 20;return x; }int aget_x(); 答案:两次 # 第一次 int tmpa; # 第二次 int xtmp;2.左值与右值 🍏2.1 能取地址操作的就是左值 …...

GitHub年度报告发布!Python首次超越JavaScript
全球开发者数量激增,GenAI 项目呈爆炸式增长趋势,推动编程语言的应用格局也发生了巨大变化,最新的 GitHub Octoverse 报告来了! 1、Python 首次超越 JavaScript,成为 GitHub 平台最顶级编程语言 不同于流传“AI 即将取…...
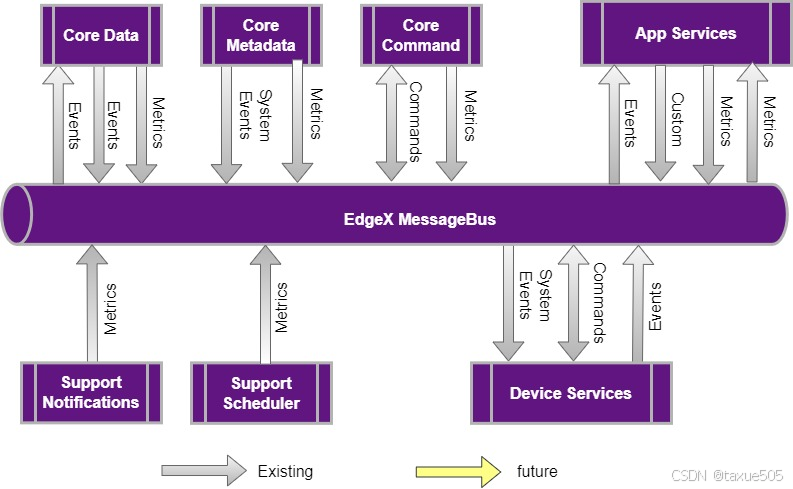
EdgeX Message Bus 消息总线
EdgeX Message Bus 消息总线 一、概述 EdgeX MessageBus 内部消息总线,用于 EdgeX 服务之间的内部通信。 EdgeX 服务是指来自 EdgeX 的任何核心/支持/应用程序/设备服务或使用 EdgeX SDK 构建的任何自定义应用程序或设备服务。 EdgeX MessageBus 用于内部 EdgeX 服务与服务之间…...

【JavaEE进阶】关于Maven
目录 🌴什么是Maven 🌲为什么要学Maven 🎍创建一个Maven项目 🎄Maven核心功能 🚩项目构建 🚩依赖管理 🎋Maven Help插件 🍀Maven 仓库 🚩本地仓库 Ὢ…...

YOLOv9-0.1部分代码阅读笔记-autoanchor.py
autoanchor.py utils\autoanchor.py 目录 autoanchor.py 1.所需的库和模块 2.def check_anchor_order(m): 3.def check_anchors(dataset, model, thr4.0, imgsz640): 4.def kmean_anchors(dataset./data/coco128.yaml, n9, img_size640, thr4.0, gen1000, verboseTrue…...

Electronjs+Vue如何开发PC桌面客户端(Windows,Mac,Linux)
electronjs官网 https://www.electronjs.org/zh/ Electron开发PC桌面客户端的技术选型非常适合已经有web前端开发人员的团队。能够很丝滑的过渡。 Electron是什么? Electron是一个使用 JavaScript、HTML 和 CSS 构建桌面应用程序的框架。 嵌入 Chromium 和 Node.…...

谷歌浏览器 安装谷歌浏览器特定版本后禁止自动更新
问题描述 我们通过离线安装谷歌浏览器后,第一次打开浏览器时会默认下载最新版本,等到我们重启浏览器后它会自动更新。在项目中为了能固定浏览器版本,所以要禁止谷歌浏览器的更新,网上找了好多方法都没用,自己摸索出来…...

Linux计算时间差
Linux计算时间差 1、Linux计算时间差2、时间差的应用 1、Linux计算时间差 在Linux中,计算时间差通常是为了统计、监控或调试。时间差可以用来衡量任务执行的时间,或者两个事件之间的间隔。例如,响应时间、执行时间、定时任务与延时处理等 以…...
Python的3D可视化库【vedo】2-5 (plotter模块) 坐标转换、场景导出、添加控件
文章目录 4 Plotter类的方法4.7 屏幕和场景中的坐标点转换4.7.1 屏幕坐标转为世界坐标4.7.2 世界坐标转为屏幕坐标4.7.3 屏幕坐标取颜色 4.8 导出4.8.1 导出2D图片4.8.2 导出3D文件 4.9 添加控件4.9.1 添加内嵌子窗口4.9.2 添加选择区4.9.3 添加比例尺4.9.4 为对象添加弹出提示…...

【VUE】13、安装nrm管理多个npm源
nrm(npm registry manager)是一个 npm 源管理器,它允许用户快速地在不同的 npm 源之间进行切换,以提高包管理的速度和效率。以下是对 nrm 使用的详细介绍: 1、安装nrm 在使用 nrm 之前,需要先确保已经安装…...

【SQL/MySQL 如何使用三种触发器】SQL语句实例演示
触发器介绍 – 触发器是与表有关的数据库对象,指在insert/update/delete之前(BEFORE)或之后(AFTER),触发并执行触发器中定义的SQL语句集合。 – 使用别名OLD和NEW来引用触发器中发生变化的记录内容,这与其他的数据库是相似的。现在触发器还只…...
Docker容器五种网络驱动模式详解
Docker 网络用于在容器之间以及容器与外部网络之间提供通信功能。它允许容器在隔离的网络环境中运行,同时也能根据需要与其他容器或外部网络进行交互。通过使用网络驱动,Docker 可以创建不同类型的网络,以满足各种应用场景的需求。 传统上&am…...

netfilter简介及流程图
Netfilter 是 Linux 内核中用于网络包过滤和操作的框架,由 Rusty Russell 于1998年创立,旨在改进旧的 ipchains 和 ipfwadm 实现。它采用模块化设计,具有良好可扩展性,并在2000年3月合并进Linux 2.3.x内核版本。 Netfilter的主要…...

Vue 前端代码规范
在 Vue 前端开发中,遵循代码规范可以提高代码的可读性、可维护性和团队协作效率。以下是一些详细的 Vue 前端代码规范,涵盖了多个方面: ### 1. **项目结构** - **目录结构**:- src/ 目录下应包含 components/、views/、store/、router/、ass…...
JAVA:组合模式(Composite Pattern)的技术指南
1、简述 组合模式(Composite Pattern)是一种结构型设计模式,旨在将对象组合成树形结构以表示“部分-整体”的层次结构。它使客户端对单个对象和组合对象的使用具有一致性。 设计模式样例:https://gitee.com/lhdxhl/design-pattern-example.git 2、什么是组合模式 组合模式…...
)
js常用方法之: 预览大图(uniapp原生方法封装)
方法: //预览图片 pic可传单个图片地址字符串 或 图片数组(带index) previewPic: function(pic, index) {if (!pic) return;if (index undefined) {let array [];array.push(pic);uni.previewImage({urls: array,current: array[0]});} else {uni.previewImage({urls: pic,…...
python 高级用法
1、推导列表 ans [ x for x in range(6)] print(ans)ans [ x for x in range(6) if x > 2] print(ans)ans [ x*y for x in range(6) if x > 2 for y in range(6) if y < 3] print(ans) 2、map 函数 a list(map(list,"abc")) print(a) b list(map(ch…...

TISAX认证最新消息
一、TISAX认证概述 TISAX(Trusted Information Security Assessment Exchange)认证是由德国汽车工业协会(VDA)主导开发的一种信息安全评估标准。该认证旨在确保汽车供应链中的信息安全,帮助汽车产业链中的企业保护其敏…...

Python中所有子图标签Legend显示详解
在数据可视化中,图例(legend)是一个非常重要的元素,它能够帮助读者理解图表中不同元素的含义。特别是在使用Python进行可视化时,matplotlib库是一个非常强大的工具,能够轻松创建包含多个子图的图表…...

Sora 2 + Premiere = 新一代“AI剪辑OS”?深度拆解其MediaCore架构、Timeline Graph API及动态权重调度算法
更多请点击: https://intelliparadigm.com 第一章:Sora 2 Premiere 新一代“AI剪辑OS”?概念演进与范式重构 传统视频编辑正经历一场静默但深刻的底层迁移——当 Sora 2 的原生时空建模能力与 Adobe Premiere Pro 的专业时间线引擎深度耦合…...

别再“另存为”了!职场人90%的无效内耗都源于这一个操作。企业文档如何管理?
加班到晚上八点,职场人小林终于改完了项目方案,随手点了“另存为”,命名为“方案_最终版.doc“后发到了工作群。本以为可以安心下班,群里却炸锅了:“小林,你这个最终版和我手里的不一样啊?”“我…...

PHPExcel批量数据导入终极指南:验证、清洗与入库全流程 [特殊字符]
PHPExcel批量数据导入终极指南:验证、清洗与入库全流程 🚀 【免费下载链接】PHPExcel ARCHIVED 项目地址: https://gitcode.com/gh_mirrors/ph/PHPExcel PHPExcel是一款强大的PHP库,专门用于处理Excel文件的读取、写入和操作。虽然该项…...

如何快速批量添加专业水印:3分钟掌握摄影作品保护终极指南
如何快速批量添加专业水印:3分钟掌握摄影作品保护终极指南 【免费下载链接】semi-utils 一个批量添加相机机型和拍摄参数的工具,后续「可能」添加其他功能。 项目地址: https://gitcode.com/gh_mirrors/se/semi-utils semi-utils是一款专为摄影师…...

从 SU01 到 SAP HANA,DBMS 用户管理里的 SSO 选项到底在管什么
项目里讨论 SSO 时,大家很容易把它想成一个单点登录按钮,好像在某处勾选一下,用户就能从 SAP GUI、Fiori、报表工具一路无感访问到数据库。到了 SAP NetWeaver AS 和 SAP HANA 组合的系统里,这个理解会带来不少误会。因为从 ABAP 侧维护 DBMS 用户的 SSO 选项,只是在用户主…...
)
在服务器上如何去部署Codex(AutoDL or 其他的服务器)
在本地 VSCode 中使用 Codex 时,如果通过 Remote-SSH 连接 AutoDL 或其他远端服务器,常常会遇到 Codex 无法正常响应、请求中断、地区限制、stream disconnected before completion 等问题。其根本原因通常是:Codex 的请求实际发生在远端服务…...

告别裸机轮询:在STM32F103上为AHT20温湿度采集加入FreeRTOS实时任务管理
从裸机轮询到RTOS任务管理:STM32F103与AHT20温湿度传感器的架构升级实战 在嵌入式开发领域,如何从简单的功能实现进阶到健壮的软件架构设计,是每个开发者必须面对的挑战。本文将带你完成一次典型的架构升级——将基于STM32F103的AHT20温湿度传…...
)
2026年小白程序员必看:5项吃香AI技能,助你薪资翻倍(建议收藏)
2026年小白程序员必看:5项吃香AI技能,助你薪资翻倍(建议收藏) 随着AI大模型重构职场规则,掌握相关技能将极大提升工作效率和薪资。本文为小白和程序员推荐了5项最吃香的AI技能:RAG、提示词工程、多模态大模…...

联想M920x黑苹果EFI配置终极指南:轻松实现macOS完美兼容
联想M920x黑苹果EFI配置终极指南:轻松实现macOS完美兼容 【免费下载链接】M920x-Hackintosh-EFI Hackintosh Opencore EFIs for M920x 项目地址: https://gitcode.com/gh_mirrors/m9/M920x-Hackintosh-EFI 想要在联想M920x迷你主机上体验macOS系统吗…...

终极开源Spotify音乐下载指南:永久保存你的音乐收藏
终极开源Spotify音乐下载指南:永久保存你的音乐收藏 【免费下载链接】spotify-downloader Download your Spotify playlists and songs along with album art and metadata (from YouTube if a match is found). 项目地址: https://gitcode.com/gh_mirrors/spotif…...