halcon单相机+机器人*眼在手外标定心得
目的
得到相机坐标系下的点与机器人底座base的转换关系,camera_in_base
两个不确定的定量
1,相机与机器人底座base之间的相对位置是固定的,既camera_in_base
2,机械手末端与标定物 tool_in_obj是固定的
辅助确定量
工作台与相机的位姿关系
`为什么要有辅助确定量,因为标定时标定板obj是拿在机器人手上的,我们的目的是要把工作台上的薄片物体在相机中的空间坐标点,转换到机器人底座坐标下
** 如何实现_只需要把标准的标定板,放在工作台平面上,拍照,确定工作台平面相对于固定相机的pose。那只要放在这个工作台上的物件,它与相机的pose就是确定的**
总结一下我们有了什么
从标定中获得了 相机与机器人底座之间的pose
从对工作台的标定中获得了 工作台与相机之间的pose
转换过程
工作台上照片上的一个点,通过相机内参,和工作台相对于相机的外参,转换到相机坐标系下,再从相机转换到机器人底座坐标系下!
懂了吗?
相关文章:

halcon单相机+机器人*眼在手外标定心得
目的 得到相机坐标系下的点与机器人底座base的转换关系,camera_in_base 两个不确定的定量 1,相机与机器人底座base之间的相对位置是固定的,既camera_in_base 2,机械手末端与标定物 tool_in_obj是固定的 辅助确定量 工作台与相…...

pytest入门十:配置文件
pytest.ini:pytest的主配置文件,可以改变pytest的默认行为conftest.py:测试用例的一些fixture配置 pytest.ini marks mark 打标的执行 pytest.mark.add add需要些marks配置否则报warning [pytest] markersadd:测试打标 测试用例中添加了 p…...
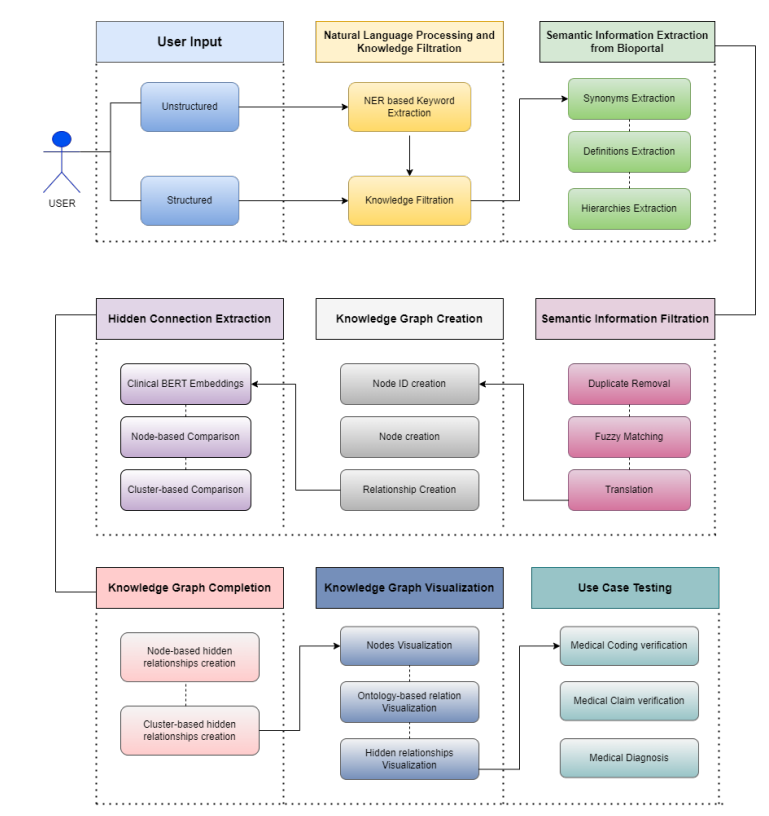
基于Clinical BERT的医疗知识图谱自动化构建方法,双层对比框架
基于Clinical BERT的医疗知识图谱自动化构建方法,双层对比框架 论文大纲理解1. 确认目标2. 目标-手段分析3. 实现步骤4. 金手指分析 全流程核心模式核心模式提取压缩后的系统描述核心创新点 数据分析第一步:数据收集第二步:规律挖掘第三步&am…...

介绍 Html 和 Html 5 的关系与区别
HTML(HyperText Markup Language)是构建网页的标准标记语言,而 HTML5 是 HTML 的最新版本,包含了一些新的功能、元素、API 和属性。HTML5 相对于早期版本的 HTML(比如 HTML4)有许多重要的改进和变化。以下是…...

C05S13-MySQL数据库备份与恢复
一、MySQL数据备份 1. 数据备份概述 数据备份的主要目的是灾难恢复,也就是当数据库等出现故障导致数据丢失,能够通过备份恢复数据。 数据备份可以分为物理备份和逻辑备份。物理备份,又称为冷备份,需要关闭数据库进行备份&#…...

【MySQL — 数据库基础】深入理解数据库服务与数据库关系、MySQL连接创建、客户端工具及架构解析
目录 1. 数据库服务&数据库&表之间的关系 1.1 复习 my.ini 1.2 MYSQL服务基于mysqld启动而启动 1.3 数据库服务的具体含义 1.4 数据库服务&数据库&表之间的关系 2. 客户端工具 2.1 客户端连接MySQL服务器 2.2 客…...
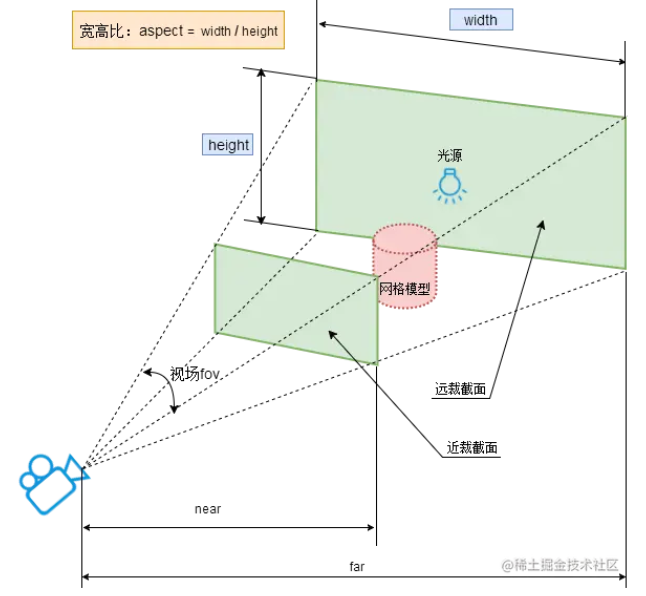
Three.js相机Camera控件知识梳理
原文:https://juejin.cn/post/7231089453695238204?searchId20241217193043D32C9115C2057FE3AD64 1. 相机类型 Three.js 主要提供了两种类型的相机:正交相机(OrthographicCamera)和透视相机(PerspectiveCamera&…...

Unity 开发Apple Vision Pro空间锚点应用Spatial Anchor
空间锚点具有多方面的作用 虚拟物体定位与固定: 位置保持:可以把虚拟物体固定在现实世界中的特定区域或位置。即使使用者退出程序后再次打开,之前锚定过的虚拟物体仍然能够出现在之前所锚定的位置,为用户提供连贯的体验。比如在一…...
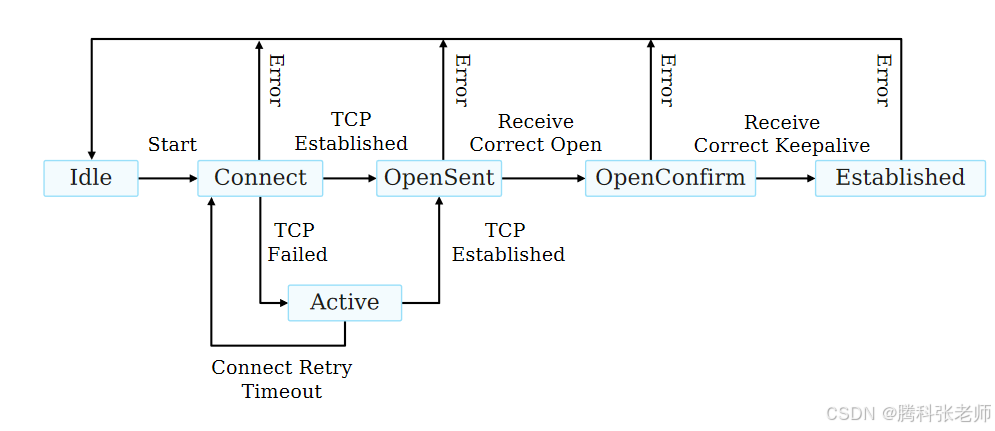
BGP的六种状态分别是什么?
此文章主要简单介绍下BGP的六种状态 1.Idle BGP会话的初始状态,路由器在此状态下不与任何BGP邻居通信,通常标识会话还没有开始或由于错误而未能启动,一般来说,缺乏去往BGP对等体的路由是导致BGP路由器其状态一直处于idle状态的常…...
IDEA搭建SpringBoot,MyBatis,Mysql工程项目
目录 一、前言 二、项目结构 三、初始化项目 四、SpringBoot项目集成Mybatis编写接口 五、代码仓库 一、前言 构建一个基于Spring Boot框架的现代化Web应用程序,以满足[公司/组织名称]对于[业务需求描述]的需求。通过利用Spring Boot简化企业级应用开发的优势&…...

Reactor
文章目录 正确的理解发送double free问题 1.把我们的reactor进行拆分2.链接管理3.Reactor的理论 listensock只需要设置_recv_cb,而其他sock,读,写,异常 所以今天写nullptr其实就不太对,添加为空就没办法去响应事件 获…...

在ESP32使用AT指令集与服务器进行TCP/IP通信时,<link ID> 解释
在ESP32使用AT指令集与服务器进行TCP/IP通信时,<link ID> 是一个非常重要的参数。它用于标识不同的连接实例,特别是在多连接场景下(如同时建立多个TCP或UDP连接)。每个连接都有唯一的<link ID>,通过这个ID…...

[SZ901] JTAG合并功能(类似FPGA菊花链)
SZ901 JTAG支持将JTAG端口组合,最多将四个JTAG变成一个 设置如下 Vivado 识别结果如下 两块板子,变成一组,,可以同时抓取信号,调试! SZ901 已上架淘宝,搜素“SZ901”哦...

paimon中的Tag
TAG 在传统数仓场景中,从传统数据库中导入的事实表数据一般是全量导入,按天分区每天都存储一份全量数据,paimon对此提供了Tag机制,创建TAG时,会对当前数据做一份全量快照,在之后对表的数据进行更新也不会影…...

3分钟读懂数据分析的流程是什么
数据分析是基于商业目的,有目的地进行收集、整理、加工和分析数据,提炼出有价值的 信息的一个过程。整个过程大致可分为五个阶段,具体如下图所示。 1.明确目的和思路 在开展数据分析之前,我们必须要搞清楚几个问题,比…...

uniapp入门 01创建项目模版
0安装 hbuilder x 标准版 1.创建模版工程 2.创建官方 案例工程 index.uvuewen 文件解析 <!-- 模版 标签 --> <template><view></view></template><!-- 脚本 --> <script>export default {data() {return {}},onLoad() {},methods:…...

React 19新特性探索:提升性能与开发者体验
React作为最受欢迎的JavaScript库之一,不断推出新版本以应对日益复杂的应用需求。React 19作为最新的版本,引入了一系列令人兴奋的新特性和改进,旨在进一步提升应用的性能、开发效率和用户体验。 本文将深入探讨React 19的新特性,…...

Hive是什么,Hive介绍
官方网站:Apache Hive Hive是一个基于Hadoop的数据仓库工具,主要用于处理和查询存储在HDSF上的大规模数据。Hive通过将结构化的数据文件映射为数据库表,并提供类SQL的查询功能,使得用户可以使用SQL语句来执行复杂的MapReduce任…...

[LeetCode-Python版] 定长滑动窗口1(1456 / 643 / 1343 / 2090 / 2379)
思路 把问题拆解成三步:入-更新-出。 入:下标为 i 的元素进入窗口,更新相关统计量。如果 i<k−1 则重复第一步。更新:更新答案。一般是更新最大值/最小值。出:下标为 i−(k-1) 的元素离开窗口,更新相关…...

imx6ull qt多页面控制系统(正点原子imx系列驱动开发)
开题答辩完了也考完了四六级,赶紧来更新一下一个月前留下的坑吧 QAQ首先,因为毕业设计需要用到这些知识所以就从网络上找了一个智能车机系统,借鉴了一下大佬的项目思路,缝缝补补一个月终于完成了这一内容。 在这里先感谢从两位大佬…...

ESP32-S2深度睡眠唤醒与音频输出:CircuitPython开发实战避坑指南
1. 项目概述 如果你正在用CircuitPython捣鼓ESP32-S2这类板子,想做个低功耗传感器节点或者带点声音提示的小玩意儿,那你大概率会踩到我接下来要聊的这些坑。从想让板子“睡醒”的奇怪限制,到死活不出声的音频输出,再到某天早上起…...

Mediapipe手势识别踩坑实录:解决Python 3.10+和OpenCV版本兼容性问题
Mediapipe手势识别实战:Python高版本环境兼容性全指南 当你在Python 3.10或更高版本中尝试运行Mediapipe手势识别项目时,可能会遇到各种令人沮丧的错误。从模块导入失败到函数弃用警告,再到依赖冲突,这些问题往往让开发者陷入无休…...

OBS Multi RTMP插件:终极多平台直播同步解决方案
OBS Multi RTMP插件:终极多平台直播同步解决方案 【免费下载链接】obs-multi-rtmp OBS複数サイト同時配信プラグイン 项目地址: https://gitcode.com/gh_mirrors/ob/obs-multi-rtmp 在当今的多平台直播时代,内容创作者面临着同时向多个平台推送直…...

终极 ChatGPT-Google 扩展日志分析指南:深度洞察用户行为与功能使用统计 [特殊字符]
终极 ChatGPT-Google 扩展日志分析指南:深度洞察用户行为与功能使用统计 🔍 【免费下载链接】chatgpt-google-extension This project is deprecated. Check my new project ChatHub: 项目地址: https://gitcode.com/gh_mirrors/ch/chatgpt-google-ext…...

科技早报晚报|2026年5月14日:调试工作台、Agent 证据格式与多智能体编排,今晚更值得做成产品的 3 个技术机会
科技早报晚报|2026年5月14日:调试工作台、Agent 证据格式与多智能体编排,今晚更值得做成产品的 3 个技术机会 一句话导读:今晚真正值得看的,不是又一个“更会写代码”的 Agent,而是 AI 工具链开始补上的三块…...

【花雕动手做】几美元芯片就能跑的AI Agent:ESP-Claw如何用“聊天”重新定义硬件
当AI Agent突破虚拟世界的边界,开始直接控制物理设备,智能硬件的发展范式正被彻底改写。无需复杂编程,只需一句自然语言,就能让廉价硬件完成预设任务——这不是科幻场景,而是乐鑫科技开源项目ESP-Claw正在落地的现实。 作为一款开源项目,ESP-Claw在GitHub上线仅一个月便…...

基于MCP协议与微软Graph API构建安全可控的AI助手Outlook集成方案
1. 项目概述:为AI助手开启你的Outlook个人账户 如果你和我一样,每天被Outlook邮箱、日历和待办事项淹没,同时又希望AI助手能真正帮上忙——比如自动整理邮件、安排日程、甚至起草回复——那么你肯定遇到过工具链断裂的烦恼。市面上的自动化方…...

长期使用Taotoken聚合服务对开发运维负担的实际减轻感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用Taotoken聚合服务对开发运维负担的实际减轻感受 1. 从多线维护到单一入口的转变 在引入Taotoken之前,我们的开…...

【GVA】商业级综合后台的整体技术生态和功能拼图
GVA(Gin-Vue-Admin)正是一个完美的“全家桶教科书”。我们来了解一下这个综合后台里最核心的 8 大技术拼图。让我们一起去摸清这些组件的职责一、 综合后台的 8 大硬核技术拼图1. 配置管理中心 —— Viper“你们项目的配置文件(MySQL、Redis …...

基于NLP与知识图谱的业务文档智能管理:从静态文档到动态知识网络
1. 项目概述:一套面向业务文档的“瑞士军刀”最近在整理团队的知识库和项目文档时,我反复被一个问题困扰:我们花大量时间写的需求文档、设计稿、会议纪要,最后都变成了一个个孤立的文件,躺在云盘或协作工具的角落里。当…...