基于STM32F103控制L298N驱动两相四线步进电机
文章目录
- 前言
- 一、模块参数
- 二、接口说明
- 三、准备工作
- 四、直流电机驱动
- 引脚接线
- 效果展示
- 五、两相四线步进电机驱动
- 步进电机相关概念
- 拍数驱动时序
- 引脚接线
- 效果展示
- 六、参考示例
前言
L298N 是一种常见的双 H 桥电机驱动模块,广泛用于驱动直流电机和步进电机。它基于 ST 的 L298N 芯片,具有高电流承载能力和灵活的控制模式,适合机器人、自动化设备等领域。
一、模块参数
1、驱动芯片:L298N 双 H 桥直流电机驱动芯片
2、驱动电压 Vs:+5V~+35V ; 如需要板内取电,则供电范围Vs:+7V~+35V
3、驱动电流Io:2A(MAX)
4、逻辑电压Vss:+5V~+7V(可板内取电+5V)
5、逻辑电流:0~36mA
6、控制信号输入电压范围:
低电平:-0.3V≤Vin≤1.5V
高电平:2.3V≤Vin≤Vss
7、使能信号输入电压范围:
低电平:-0.3≤Vin≤1.5V(控制信号无效)
高电平:2.3V≤Vin≤Vss(控制信号有效)
8、最大功耗:20W(温度 T=75℃时)
9、存储温度:-25℃~+130℃
二、接口说明

关于模块供电说明:
供电一:板上除了L298N外,还有7805的5V稳压芯片,当供电为5V到7V区间的时候模块内置的7805芯片不能正常工作的。所以供电端接5-7V外部电源只负责给电机供电,然后逻辑端外接5V逻辑电源。
供电二:当供电电压为7-12V时,插上板载5V使能的跳线帽,此时的逻辑端不但不用外接5V电源,还可以输出5V为单片机进行供电。
供电三:当供电在大于12V的时候,此时必须断开板载5V使能跳线帽,再在逻辑端子接入5V电源给芯片供电。如果不断开板载使能跳线帽的话,可能会损坏内置的7805的稳压芯片。
注意:板子没有升降压功能,供电范围要根据接的电机选择,避免供电过低过高带不动电机或烧坏电机,如驱动12V的电机,则接12V的电源。
三、准备工作
STM32F103最小系统板、L298N驱动模块、2个直流电机或1个两相四线步进电机、EC11旋转编码器模块以及供电电源。
四、直流电机驱动
该驱动板可驱动 2 路直流电机,使能端 ENA、ENB 为高电平时有效,控制方式及直流电机状态表如下所示:

若要对直流电机进行 PWM 调速,需设置 IN1 和 IN2,确定电机的转动方向,然后对使能端输出 PWM 脉冲,即可实现调速。注意当使能信号为 0 时,电机处于自由停止状态;当使能信号为 1,且 IN1 和 IN2 为 00 或 11 时,电机处于制动状态,阻止电机转动。IN1和IN2控制输出A,IN3和IN4控制输出B。
引脚接线
| L298N | STM32F103 / 电源 / 直流电机 |
|---|---|
| 输出A,B | 连接电机1,2 |
| 12V供电 | 电源正 |
| 供电GND | 电源负 |
| 旋转编码器A,B,S | PB3,PB1,PB0 |
| 通道A,B使能 | 去掉跳线帽,使能A接PA6,使能B接PA7 ,PWM调速 |
| IN1,IN2 | PA0,PA1 |
| IN3,IN4 | PA2,PA3 |
效果展示

五、两相四线步进电机驱动
步进电机相关概念
相数——步进电机的N、S磁场的激磁线圈对数,如两相四线步进电机,就有两对极N、S磁场的激磁线圈,四线A+、A-、B+、B-,A+A-,B+B-是连通的,在不知道四线哪两两线为一对激磁线圈,通过短接两两线有明显阻力变化的则为一对线圈。
拍数——转子转动一周,定子绕组通电的次数,以两相电机为例,有两相四拍运行方式即(A+)—(B+)—(A-)—(B-),两相八拍运行方式(A+)—(A+B+)—(B+)–(B+A-)—(A-)—(A-B-)—(B-)–(B-A+),以此循环。
步距角——步进电机接收到一个脉冲信号后,驱动电机按设定的方向转动的一个固定角度。如两相四线步进电机的基本步距角是1.8°,即一个脉冲走1.8°。
同时,为了减弱或消除步进电机的低频振动开发了细分驱动技术。细分后电机运行时的实际步距角是基本步距角的几分之一,微步即1/4-step、1/8-step、1/16-step等。 比如,两相步进电机的基本步距角是1.8°,如果没有细分,则是200个脉冲走一圈360°。细分是通过驱动器靠精确控制电机的相电流所产生的,如果是10细分,则发一个脉冲电机走0.18°,即2000个脉冲走一圈360°,电机的精度能否达到或接近0.18°,还取决于细分驱动器的细分电流控制精度等其它因素。
| 细分驱动 | 单圈步数=360°÷角度 |
|---|---|
| 四拍(1细分) | 1.8°—— 单圈200步 |
| 八拍(2细分) | 0.9°—— 单圈400步 |
| 十六拍(4细分) | 0.45°—— 单圈800步 |
| 三十二拍(8细分) | 0.225°—— 单圈1600步 |
| 六十四拍(16细分) | 0.1125°—— 单圈3200步 |
拍数驱动时序
单4拍(整步)方式驱动时序

双4拍(整步)方式驱动时序

电机转动方向如下所示,(A+)—(B+)—(A-)—(B-),以此循环,

| 特性 | 单四拍 | 双四拍 |
|---|---|---|
| 通电相数 | 每次一相 | 每次两相 |
| 功耗 | 较低 | 较高 |
| 步进角 | 一致 | 一致 |
| 力矩 | 较小 | 较大 |
| 定位稳定性 | 一般 | 更高 |
8拍(半步)方式驱动时序

电机转动方向如下所示,(A+)—(A+B+)—(B+)–(B+A-)—(A-)—(A-B-)—(B-)—(B-A+),以此循环,

反转时,控制时序倒过来控制就可实现反向转动。
引脚接线
| L298N | STM32F103 / 电源 / 两相四线电机 |
|---|---|
| 12V供电 | 电源正 |
| 供电GND | 电源负 |
| 旋转编码器A,B,S | PB3,PB1,PB0 |
| 通道A,B使能 | 把跳线帽插回去 |
| IN1,IN2 | PA0,PA1 |
| IN3,IN4 | PA2,PA3 |
| OUT1,OUT2 | A+,A- |
| OUT3,OUT4 | B+,B- |
效果展示

六、参考示例
main.c
#include "stm32f10x.h" // Device header
#include "encoder.h"
#include "l298n.h"
#include "usart.h"
#include "timer.h"
#include "pwm.h"int32_t RxData;int main(void)
{NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);usart_Init();L298N_Init();Encoder_Init();Timer_Inti();PWM_Init();while(1){ RxData =Encoder_Get();//直流电机控制正反转,调速TIM_SetCompare1(TIM3,RxData);if(Encoder_GetKey() == 0){Motor1_Zturn();Motor2_Zturn();}else{Motor1_Rturn();Motor2_Rturn();}//步进电机控制正反转
// if(Encoder_GetKey() == 0)
// {
// switch(RxData)
// {
// case 1:
// ZturndouControl_4();
// break;
// case 2:
// RturndouControl_4();
// break;
// }
// }else{
// switch(RxData)
// {
// case 1:
// ZturnControl_8();
// break;
// case 2:
// RturnControl_8();
// break;
// }
// }}
}l298n.c
#include "l298n.h"
#include "delay.h"
#include "timer.h"void L298N_Init(void)
{//通过旋转编码器控制步进电机正转,翻转,加减速,停止GPIO_InitTypeDef GPIO_InitStructurn;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitStructurn.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_InitStructurn.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3;GPIO_InitStructurn.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructurn);
}void Motor1_Stop(void) //电机1停止
{IN1(0);IN2(0);
}void Motor2_Stop(void) //电机2停止
{IN3(0);IN4(0);
}void ALL_Stop(void) //两个电机全停止
{IN1(0);IN2(0);IN3(0);IN4(0);
}void Motor1_Zturn(void) //电机1正转
{IN1(1);IN2(0);
}void Motor1_Rturn(void) //电机1反转
{IN1(0);IN2(1);
}void Motor2_Zturn(void) //电机2正转
{IN3(1);IN4(0);
}void Motor2_Rturn(void) //电机2反转
{IN3(0);IN4(1);
}void Control_4(void) //单四拍
{if(Timer_GetCounter()<2500){IN1(1);IN2(0);IN3(0);IN4(0);delay_ms(10);}else if(Timer_GetCounter()>2500 && Timer_GetCounter()<5000){IN1(0);IN2(1);IN3(0);IN4(0);delay_ms(10);}else if(Timer_GetCounter()>5000 && Timer_GetCounter()<7500){IN1(0);IN2(0);IN3(1);IN4(0);delay_ms(10);}else if(Timer_GetCounter()>7500 && Timer_GetCounter()<10000){IN1(0);IN2(0);IN3(0);IN4(1);delay_ms(10);}
}void ZturndouControl_4(void) //正双四拍
{if(Timer_GetCounter()<2500){IN1(0);IN2(1);IN3(1);IN4(0);delay_ms(10);}else if(Timer_GetCounter()>2500 && Timer_GetCounter()<5000){IN1(0);IN2(1);IN3(0);IN4(1);delay_ms(10);}else if(Timer_GetCounter()>5000 && Timer_GetCounter()<7500){IN1(1);IN2(0);IN3(0);IN4(1);delay_ms(10);}else if(Timer_GetCounter()>7500 && Timer_GetCounter()<10000){IN1(1);IN2(0);IN3(1);IN4(0);delay_ms(10);}
}void RturndouControl_4(void) //反双四拍
{if(Timer_GetCounter()<2500){IN1(1);IN2(0);IN3(1);IN4(0);delay_ms(10);}else if(Timer_GetCounter()>2500 && Timer_GetCounter()<5000){IN1(1);IN2(0);IN3(0);IN4(1);delay_ms(10);}else if(Timer_GetCounter()>5000 && Timer_GetCounter()<7500){IN1(0);IN2(1);IN3(0);IN4(1);delay_ms(10);}else if(Timer_GetCounter()>7500 && Timer_GetCounter()<10000){IN1(0);IN2(1);IN3(1);IN4(0);delay_ms(10);}
}void ZturnControl_8(void) //正八拍
{if(Timer_GetCounter()<1250){IN1(1);IN2(0);IN3(0);IN4(0);delay_ms(10);}else if(Timer_GetCounter()>1250 && Timer_GetCounter()<2500){IN1(1);IN2(0);IN3(1);IN4(0);delay_ms(10);}else if(Timer_GetCounter()>2500 && Timer_GetCounter()<3750){IN1(0);IN2(0);IN3(1);IN4(0);delay_ms(10);}else if(Timer_GetCounter()>3750 && Timer_GetCounter()<5000){IN1(0);IN2(1);IN3(1);IN4(0);delay_ms(10);}else if(Timer_GetCounter()>5000 && Timer_GetCounter()<6250){IN1(0);IN2(1);IN3(0);IN4(0);delay_ms(10);}else if(Timer_GetCounter()>6250 && Timer_GetCounter()<7500){IN1(0);IN2(1);IN3(0);IN4(1);delay_ms(10);}else if(Timer_GetCounter()>7500 && Timer_GetCounter()<8750){IN1(0);IN2(0);IN3(0);IN4(1);delay_ms(10);}else if(Timer_GetCounter()>8750 && Timer_GetCounter()<10000){IN1(1);IN2(0);IN3(0);IN4(1);delay_ms(10);}
}void RturnControl_8(void) //反八拍
{if(Timer_GetCounter()<1250){IN1(1);IN2(0);IN3(0);IN4(1);delay_ms(10);}else if(Timer_GetCounter()>1250 && Timer_GetCounter()<2500){IN1(0);IN2(0);IN3(0);IN4(1);delay_ms(10);}else if(Timer_GetCounter()>2500 && Timer_GetCounter()<3750){IN1(0);IN2(1);IN3(0);IN4(1);delay_ms(10);}else if(Timer_GetCounter()>3750 && Timer_GetCounter()<5000){IN1(0);IN2(1);IN3(0);IN4(0);delay_ms(10);}else if(Timer_GetCounter()>5000 && Timer_GetCounter()<6250){IN1(0);IN2(1);IN3(1);IN4(0);delay_ms(10);}else if(Timer_GetCounter()>6250 && Timer_GetCounter()<7500){IN1(0);IN2(0);IN3(1);IN4(0);delay_ms(10);}else if(Timer_GetCounter()>7500 && Timer_GetCounter()<8750){IN1(1);IN2(0);IN3(1);IN4(0);delay_ms(10);}else if(Timer_GetCounter()>8750 && Timer_GetCounter()<10000){IN1(1);IN2(0);IN3(0);IN4(0);delay_ms(10);}
}相关文章:
基于STM32F103控制L298N驱动两相四线步进电机
文章目录 前言一、模块参数二、接口说明三、准备工作四、直流电机驱动引脚接线效果展示 五、两相四线步进电机驱动步进电机相关概念拍数驱动时序引脚接线效果展示 六、参考示例 前言 L298N 是一种常见的双 H 桥电机驱动模块,广泛用于驱动直流电机和步进电机。它基于…...

libreoffice在Windows和Linux环境的安装和结合Springboot使用教程
前言: 在公司做开发时,遇到一个需求,要求上传的文件有图片,也有word和pdf。预览信息时,既要求能水印展示出来,又要求能大图水印预览。思索许久,我决定采取全部打水印然后转成图片Base64&#x…...

前端开发 -- 自动回复机器人【附完整源码】
一:效果展示 本项目实现了一个简单的网页聊天界面,用户可以在输入框中输入消息,并点击发送按钮或按下回车键来发送消息。机器人会根据用户发送的消息内容,通过关键字匹配来生成自动回复。 二:源代码分享 <!DOCTYP…...
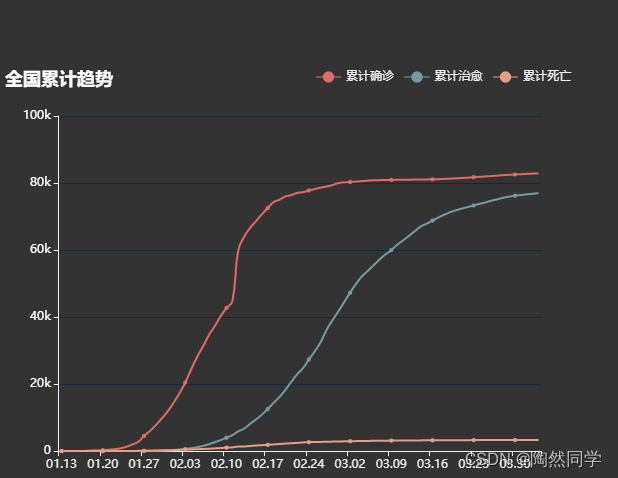
vue+echarts实现疫情折线图
效果: 代码: <<template><div><div id"left1" style "height:800px;width:100%"></div></div> </template><script> //疫情数据//export default {data() {return {data:{//疫情数据…...

服务器nfs文件共享
1. 配置 NFS 服务器(NFS Server) 在 Ubuntu/Debian 上: sudo apt update sudo apt install nfs-kernel-server在 CentOS/RHEL 上: sudo yum install nfs-utils1.2 创建共享目录 选择一个要共享的目录,并确保该目录的权限正确设置。例如,假设我们要共享 /srv/nfs 目录…...
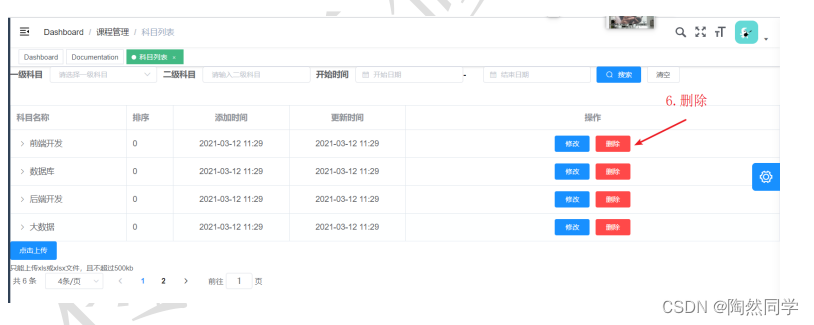
基于Vue+SSM+SpringCloudAlibaba的科目课程管理系统
功能1:科目列表 功能2:条件查询 功能3:分页查询 功能4:excel批量导入 功能5:修改 功能6:删除...

vue3配置caddy作为静态服务器,在浏览器地址栏刷新出现404
vue3配置caddy作为静态服务器,在浏览器地址栏刷新出现404 1 情况描述2 原因3 配置 1 情况描述 在vue打包之后,形成dist文件,采用caddy作为静态资源服务器。在浏览器中输入域名时可以访问网站,但是,进过路由导航栏内部…...

深入理解委托:C# 编程中的强大工具
在面向对象编程中,委托(Delegate) 是一个非常强大且灵活的概念,特别是在 C# 编程语言中。它不仅仅是函数指针的替代品,还提供了更高层次的抽象,使得代码更加简洁、灵活和可维护。在这篇博客中,我…...
【Java 数据结构】合并两个有序链表
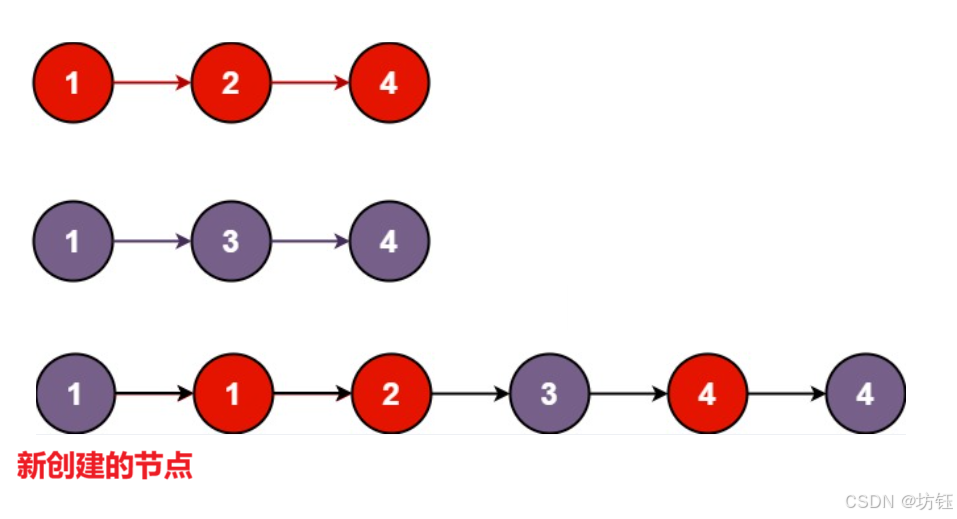
🔥博客主页🔥:【 坊钰_CSDN博客 】 欢迎各位点赞👍评论✍收藏⭐ 目录 1. 题目 2. 解析 3. 代码实现 4. 小结 1. 题目 将两个升序链表合并为一个新的 升序 链表并返回。新链表是通过拼接给定的两个链表的所有节点组成的。 示…...
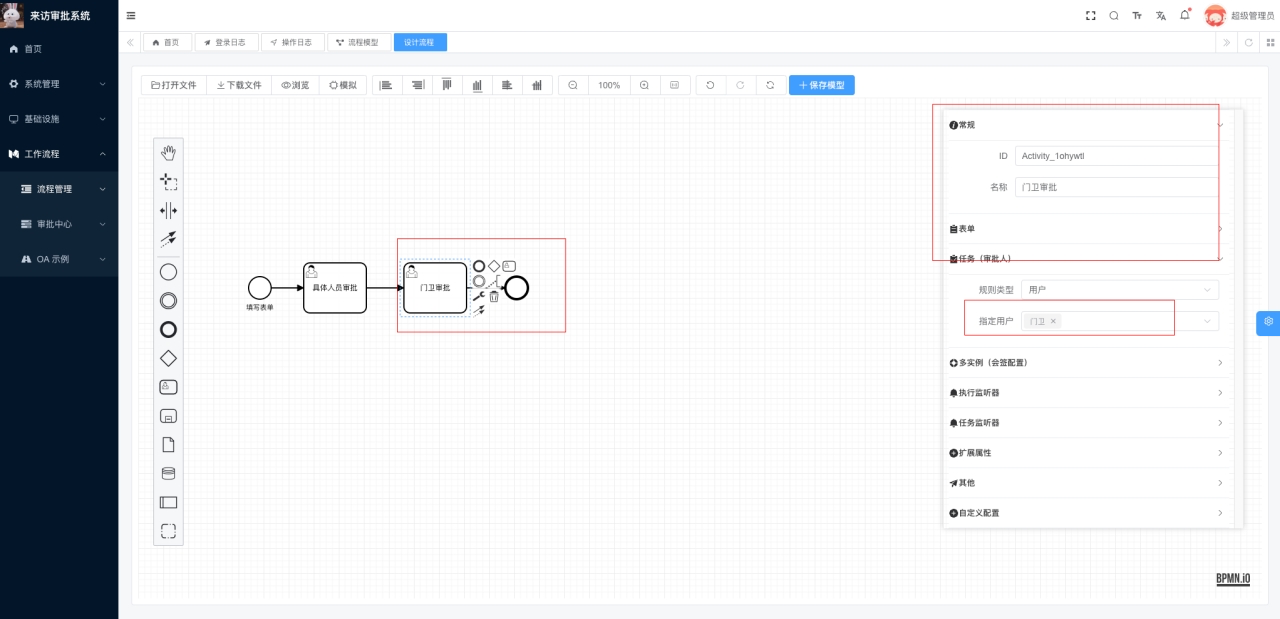
基于微信小程序的校园访客登记系统
基于微信小程序的校园访客登记系统 功能列表 用户端功能 注册与登录 :支持用户通过手机号短信验证码注册和登录。个人资料管理 :允许用户编辑和更新个人信息及其密码。站内信消息通知:通知公告。来访预约:提交来访预约支持车牌…...

uniapp 判断多选、选中取消选中的逻辑处理
一、效果展示 二、代码 1.父组件: :id=“this.id” : 给子组件传递参数【id】 @callParentMethod=“takeIndexFun” :给子组件传递方法,这样可以在子组件直接调用父组件的方法 <view @click="$refs.member.open()"...

php8.0版本更新了哪些内容
PHP 8.0版本是PHP语言的一个重要更新,它引入了许多新特性和改进,旨在提高性能、增强代码的可读性和可维护性。以下是PHP 8.0版本更新的主要内容: 一、性能提升 JIT编译器:PHP 8.0引入了Just-In-Time(JIT)…...
Browser Use:AI智能体自动化操作浏览器的开源工具
Browser Use:AI智能体自动化操作浏览器的开源工具 Browser Use 简介1. 安装所需依赖2. 生成openai密钥3. 编写代码4. 运行代码5. 部署与优化5.1 部署AI代理5.2 优化与扩展总结Browser Use 简介 browser-use是一个Python库,它能够帮助我们将AI代理与浏览器自动化操作结合起来;…...

Android笔记(四十):ViewPager2嵌套RecyclerView滑动冲突进一步解决
背景 ViewPager2内嵌套横向滑动的RecyclerView,会有滑动冲突的情况,引入官方提供的NestedScrollableHost类可以解决冲突问题,但是有一些瑕疵,滑动横向RecyclerView到顶部,按住它不放手继续往左拖再往右拖,这…...

POS系统即销售点系统 文档与数据库设计
POS系统即销售点系统,是一种用于商业交易的软硬件集成系统,主要用于管理销售、库存、客户信息等,以下是其详细介绍: 1. 系统组成 硬件部分 : 收银终端:包括传统的台式收银机、平板电脑、智能手机等设备&a…...

安全合规遇 AI 强援:深度驱动行业发展新引擎 | 倍孜网络CEO聂子尧出席ICT深度观察报告会!
12月24日,2025中国信通院深度观察报告会科技伦理与合规发展分论坛在北京举办。本次分论坛主题为“伦理先行,合规致远”,聚焦互联网广告合规治理、移动终端应用生态治理、短视频平台责任限度等前沿话题进行分享与探讨。工业和信息化部领导&…...
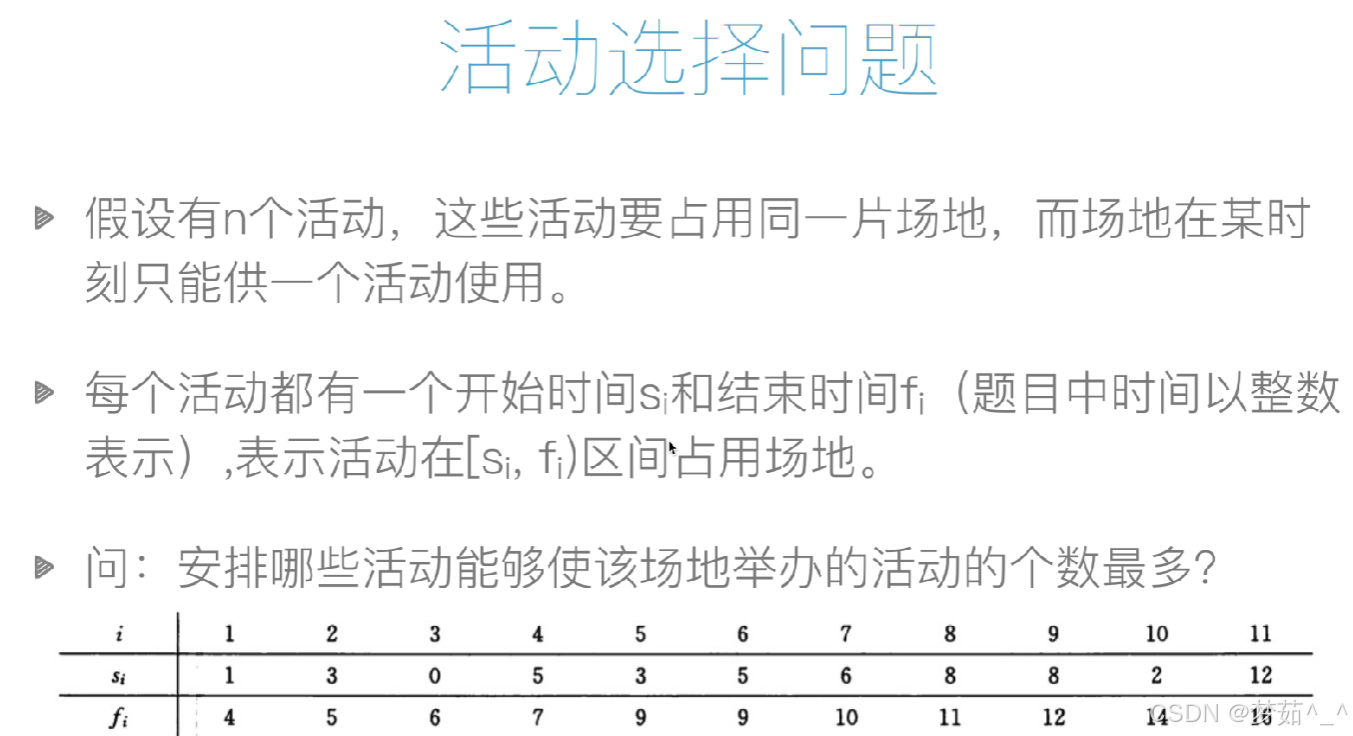
算法进阶:贪心算法
贪心算法是一种简单而直观的算法思想,它在每一步选择中都采取在当前状态下最优的选择,以期望最终得到全局最优解。贪心算法通常适用于一些具有最优子结构的问题,即问题的最优解可以通过一系列局部最优解的选择得到。 贪心算法的基本思路是&a…...
)
C++ 设计模式:工厂方法(Factory Method)
链接:C 设计模式 链接:C 设计模式 - 抽象工厂 链接:C 设计模式 - 原型模式 链接:C 设计模式 - 建造者模式 工厂方法(Factory Method)是创建型设计模式之一,它提供了一种创建对象的接口…...

手机联系人 查询 添加操作
Android——添加联系人_android 添加联系人-CSDN博客 上面连接添加联系人已测试 是可以 Android : 获取、添加、手机联系人-ContentResolver简单应用_contentresolver 添加联系人-CSDN博客...
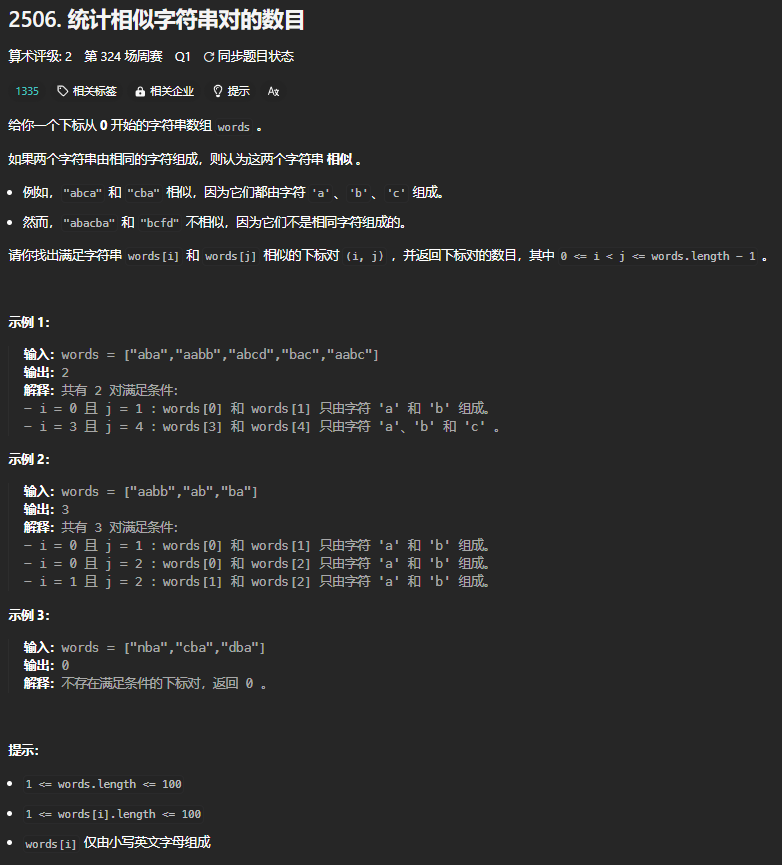
【LeetCode】2506、统计相似字符串对的数目
【LeetCode】2506、统计相似字符串对的数目 文章目录 一、哈希表位运算1.1 哈希表位运算 二、多语言解法 一、哈希表位运算 1.1 哈希表位运算 每个字符串, 可用一个 int 表示. (每个字符 是 int 的一个位) 哈希表记录各 字符组合 出现的次数 步骤: 遇到一个字符串, 得到 ma…...

计算机二级C语言常考选择题
经原国家教育委员会(现教育部)批准、由教育部考试中心主办、面向社会、用于考查非计算机专业应试人员计算机应用知识与技能的全国性计算机水平考试体系,是全国计算机等级考试(National Computer Rank Examination,以下…...

海康工业相机LabVIEW二次开发实战——参数配置优化与图像高效存储
1. 海康工业相机与LabVIEW开发环境搭建 第一次接触海康工业相机时,我也被它丰富的功能接口和复杂的参数体系搞得晕头转向。但实际用LabVIEW开发后发现,只要掌握几个关键点,就能快速上手。海康官方提供的MVS客户端是个好东西,安装后…...
)
TikTok搜索数据爬虫实战:用PHP+Node搞定那个烦人的x-bogus签名(附完整代码)
TikTok搜索数据爬虫实战:PHP与Node.js协同破解x-bogus签名 1. 为什么x-bogus成为爬虫开发者的噩梦 每次尝试抓取TikTok搜索数据时,开发者都会遇到那个令人头疼的x-bogus参数。这个看似随机的字符串实际上是TikTok反爬系统的核心防线之一。它通过对请求参…...
)
C# AI推理加速架构设计图(.NET 11专属GPU/CPU/NPU三模调度蓝图)
第一章:C# AI推理加速架构设计图总览C# AI推理加速架构以“跨层协同、软硬共生”为核心设计理念,构建从模型加载、计算调度到硬件执行的全栈优化通路。该架构并非简单封装原生推理引擎,而是通过抽象统一的IR(Intermediate Represe…...

Cosmos-Reason1-7B效果展示:对‘为什么这个递归会栈溢出’提问,输出调用深度热力图分析
Cosmos-Reason1-7B效果展示:对为什么这个递归会栈溢出提问,输出调用深度热力图分析 提示:本文所有展示效果均基于真实测试,Cosmos-Reason1-7B模型能够深入分析递归函数的调用过程,并通过热力图直观展示栈溢出原因 1. 工…...
)
C# 13不安全代码审计清单:7项Roslyn Analyzer新规+4类CI/CD拦截阈值配置(附GHA自动化检测脚本)
第一章:C# 13不安全代码管控配置概览C# 13延续了对内存安全的高度重视,在默认启用/unsafe-(即禁用不安全上下文)的前提下,将不安全代码的启用明确纳入项目级显式管控范畴。开发者必须主动声明许可,并通过多…...

别再当‘炼丹师’了!用SHAP值给你的PyTorch模型做个‘CT扫描’,一眼看懂特征在干嘛
用SHAP值透视PyTorch模型:从黑箱到透明决策的工程实践 当你的深度学习模型在测试集上表现优异,却在生产环境中频频失误时,是否曾怀疑过那些隐藏在权重矩阵背后的"暗箱操作"?传统模型评估指标就像体检报告上的数字&#…...
)
算术运算符(i++与++i)
i与i在独立使用时结果一致;作为表达式使用时:j 8(1)k j 等于 j j1,再k j 。先自增,再赋值 ,j9,k9(2) k j 等于 k j,再j j1 。先赋值&#…...

AI 时代,计算机专业学生该怎么学?恫
整体排查思路 我们的目标是验证以下三个环节是否正常: 登录成功时:服务器是否正确生成了Session并返回了包含正确 JSESSIONID的Cookie给浏览器。 浏览器端:浏览器是否成功接收并存储了该Cookie。 后续请求:浏览器在执行查询等操作…...

实战Electron跨进程通信实现SerialPort串口数据交互
1. 为什么Electron 9.0需要跨进程通信处理串口? 第一次用Electron对接工业秤重设备时,我直接把SerialPort代码写在渲染进程,结果控制台突然报错——就像被泼了盆冷水。原来从Electron 9.0开始,安全策略禁止渲染进程直接调用原生No…...