OpenCV-Python实战(11)——边缘检测
一、Sobel 算子

通过 X 梯度核与 Y 梯度核求得图像在,水平与垂直方向的梯度。
img = cv2.Sobel(src=*,ddepth=*,dx=*,dy=*,ksize=*,scale=*,delta=*,borderType=*)
img:目标图像。
src:原始图像。
ddepth:目标图像深度,-1 代表与原始图像深度相同。
dx、dy:x或y 轴方向的求导阶数,可以为:0、1、3 等。0 表示不求导。
ksize:Soble核大小。
scale:导数计算的缩放系数,默认为:1。
delta:常数项,默认为:0。
borderType:边界样式,使用默认即可。
import cv2img = cv2.imread('jin.png')
dst_x = cv2.Sobel(src=img,ddepth=cv2.CV_32F,dx=1,dy=0)
dst_y = cv2.Sobel(src=img,ddepth=cv2.CV_32F,dx=0,dy=1)
# 取梯度的绝对值
dst_x = cv2.convertScaleAbs(dst_x)
dst_y = cv2.convertScaleAbs(dst_y)dst = cv2.addWeighted(dst_x,0.5,dst_y,0.5,0)cv2.imshow('img',img)
cv2.imshow('dst',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()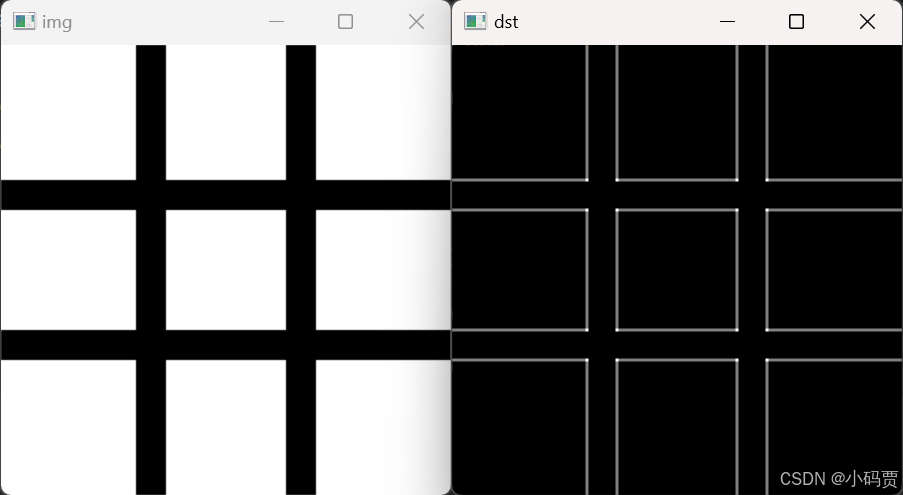
import cv2img = cv2.imread('Lena.png')[::2,::2,:]
dst_x = cv2.Sobel(src=img,ddepth=cv2.CV_32F,dx=1,dy=0)
dst_y = cv2.Sobel(src=img,ddepth=cv2.CV_32F,dx=0,dy=1)
# 取梯度的绝对值
dst_x = cv2.convertScaleAbs(dst_x)
dst_y = cv2.convertScaleAbs(dst_y)dst = cv2.addWeighted(dst_x,0.5,dst_y,0.5,0)cv2.imshow('img',img)
cv2.imshow('Sobel',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()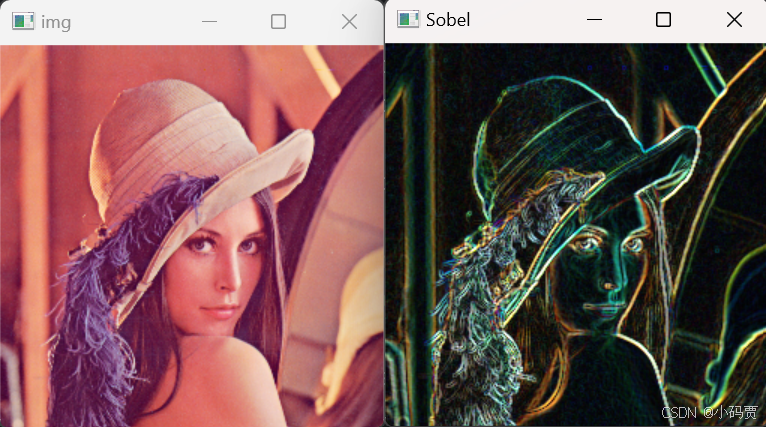
二、Scharr 算子

img = cv2.Scharr(src=*,ddepth=*,dx=*,dy=*,ksize=*,scale=*,delta=*,borderType=*)img:目标图像。
src:原始图像。
ddepth:目标图像深度,-1 代表与原始图像深度相同。
dx、dy:x或y 轴方向的求导阶数,可以为:0、1、3 等。0 表示不求导。
ksize:Soble核大小。
scale:导数计算的缩放系数,默认为:1。
delta:常数项,默认为:0。
borderType:边界样式,使用默认即可。
import cv2img = cv2.imread('Lena.png')[::2,::2,:]
cv2.imshow('img',img)
# Sobel 算子
dst_x = cv2.Sobel(src=img,ddepth=cv2.CV_32F,dx=1,dy=0)
dst_y = cv2.Sobel(src=img,ddepth=cv2.CV_32F,dx=0,dy=1)
dst_x = cv2.convertScaleAbs(dst_x) # 取梯度的绝对值
dst_y = cv2.convertScaleAbs(dst_y)
dst_Sobel = cv2.addWeighted(dst_x,0.5,dst_y,0.5,0)
cv2.imshow('Sobel',dst_Sobel)# Scharr 算子
dst_x = cv2.Scharr(src=img,ddepth=cv2.CV_32F,dx=1,dy=0)
dst_y = cv2.Scharr(src=img,ddepth=cv2.CV_32F,dx=0,dy=1)
dst_x = cv2.convertScaleAbs(dst_x) # 取梯度的绝对值
dst_y = cv2.convertScaleAbs(dst_y)
dst_Scharr = cv2.addWeighted(dst_x,0.5,dst_y,0.5,0)
cv2.imshow('Scharr',dst_Scharr)cv2.waitKey(0)
cv2.destroyAllWindows()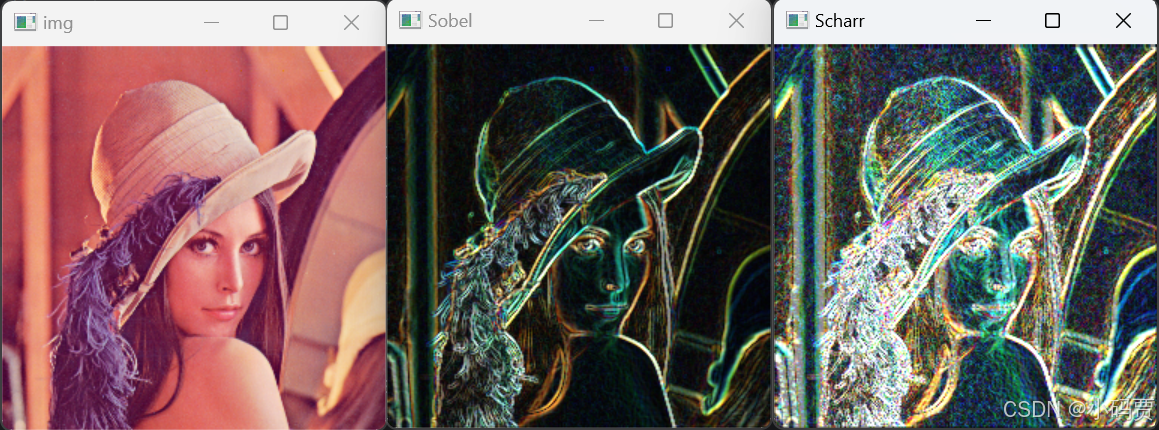
三、Laplacian 算子
img = cv2.Laplacian(src=*,ddepth=*,ksize=*,scale=*,delta=*,borderType=*)img:目标图像。
src:原始图像。
ddepth:目标图像深度,-1 代表与原始图像深度相同。
ksize:Soble核大小。
scale:导数计算的缩放系数,默认为:1。
delta:常数项,默认为:0。
borderType:边界样式,使用默认即可。
import cv2img = cv2.imread('Lena.png')[::2,::2,:]
cv2.imshow('img',img)
# Sobel 算子
dst_x = cv2.Sobel(src=img,ddepth=cv2.CV_32F,dx=1,dy=0)
dst_y = cv2.Sobel(src=img,ddepth=cv2.CV_32F,dx=0,dy=1)
dst_x = cv2.convertScaleAbs(dst_x) # 取梯度的绝对值
dst_y = cv2.convertScaleAbs(dst_y)
dst_Sobel = cv2.addWeighted(dst_x,0.5,dst_y,0.5,0)
cv2.imshow('Sobel',dst_Sobel)# Sobel 算子
dst_x = cv2.Scharr(src=img,ddepth=cv2.CV_32F,dx=1,dy=0)
dst_y = cv2.Scharr(src=img,ddepth=cv2.CV_32F,dx=0,dy=1)
dst_x = cv2.convertScaleAbs(dst_x) # 取梯度的绝对值
dst_y = cv2.convertScaleAbs(dst_y)
dst_Scharr = cv2.addWeighted(dst_x,0.5,dst_y,0.5,0)
cv2.imshow('Scharr',dst_Scharr)# Laplacian 算子
dst = cv2.Laplacian(src=img,ddepth=cv2.CV_32F,ksize=3)
dst_Laplacian = cv2.convertScaleAbs(dst_x) # 取梯度的绝对值
cv2.imshow('Laplacian',dst_Laplacian)cv2.waitKey(0)
cv2.destroyAllWindows()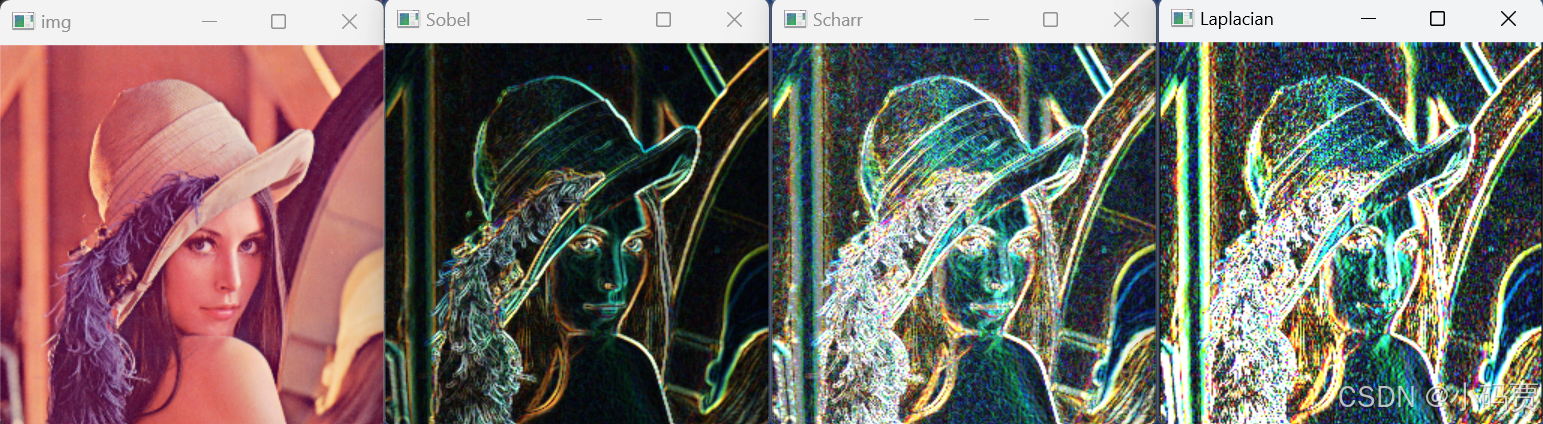
四、Canny 边缘检测 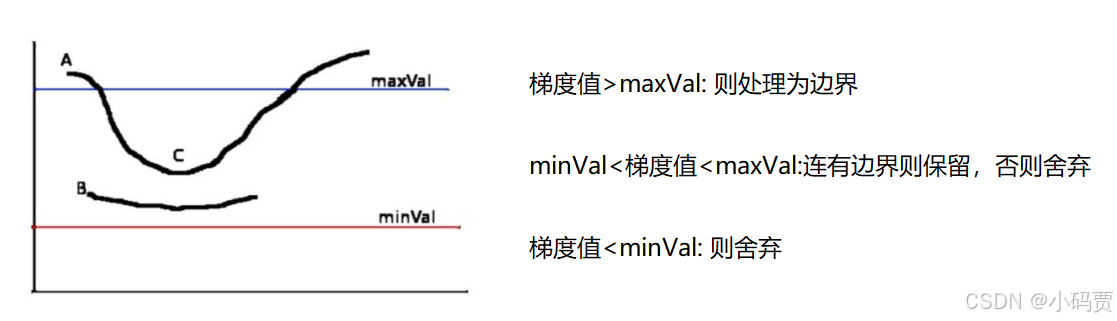
img = cv2.Canny(image=*,edges=*,threshold1=*,threshold2=*,apertureSize=*,L2gradient=False)
img:目标图像。
image:原始图像。
edges:边缘数。
threshold1、threshold2:minVal 和 maxVal。
apertureSize:运算符大小。
L2gradient:梯度公式:默认为False,;如果为Ture则:
import cv2img = cv2.imread('Lena.png')[::2,::2,:]
cv2.imshow('img',img)
# Sobel 算子
dst_x = cv2.Sobel(src=img,ddepth=cv2.CV_32F,dx=1,dy=0)
dst_y = cv2.Sobel(src=img,ddepth=cv2.CV_32F,dx=0,dy=1)
dst_x = cv2.convertScaleAbs(dst_x) # 取梯度的绝对值
dst_y = cv2.convertScaleAbs(dst_y)
dst_Sobel = cv2.addWeighted(dst_x,0.5,dst_y,0.5,0)
cv2.imshow('Sobel',dst_Sobel)# Sobel 算子
dst_x = cv2.Scharr(src=img,ddepth=cv2.CV_32F,dx=1,dy=0)
dst_y = cv2.Scharr(src=img,ddepth=cv2.CV_32F,dx=0,dy=1)
dst_x = cv2.convertScaleAbs(dst_x) # 取梯度的绝对值
dst_y = cv2.convertScaleAbs(dst_y)
dst_Scharr = cv2.addWeighted(dst_x,0.5,dst_y,0.5,0)
cv2.imshow('Scharr',dst_Scharr)# Laplacian 算子
dst = cv2.Laplacian(src=img,ddepth=cv2.CV_32F,ksize=3)
dst_Laplacian = cv2.convertScaleAbs(dst_x) # 取梯度的绝对值
cv2.imshow('Laplacian',dst_Laplacian)# Canny 算子
dst_Canny = cv2.Canny(image=img,threshold1=50,threshold2=100)
cv2.imshow('Canny',dst_Canny)cv2.waitKey(0)
cv2.destroyAllWindows()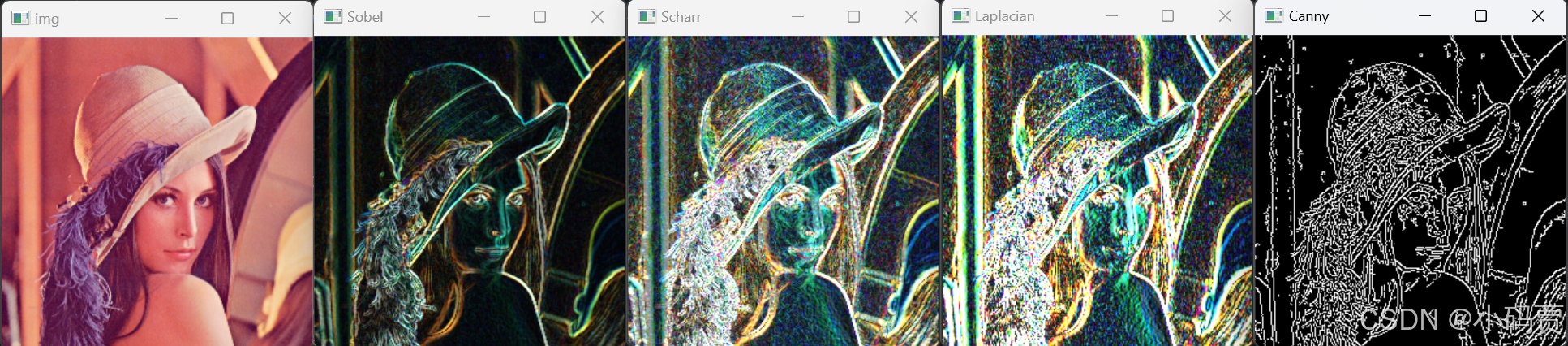

相关文章:
OpenCV-Python实战(11)——边缘检测
一、Sobel 算子 通过 X 梯度核与 Y 梯度核求得图像在,水平与垂直方向的梯度。 img cv2.Sobel(src*,ddepth*,dx*,dy*,ksize*,scale*,delta*,borderType*)img:目标图像。 src:原始图像。 ddepth:目标图像深度,-1 代表…...

【智行安全】基于Synaptics SL1680的AI疲劳驾驶检测方案
随著车载技术的快速进步,驾驶安全越来越受到重视,而疲劳驾驶是造成交通事故的重要原因之一。传统的驾驶监控技术因精度不足或反应迟缓,无法满足实时监测需求。因此,结合人工智能技术的疲劳驾驶检测系统成为行业新方向,…...

机器学习随机森林回归时间序列预模型中时间滑动窗口作用以及参数设置
一、时间序列模型中时间滑动窗口作用 在时间序列模型中,时间滑动窗口(Sliding Window)起到了至关重要的作用。它是一种常见且有效的数据表示技术,通过将时间序列数据分割成多个固定大小的窗口,来捕捉和分析数据中的模式…...

【Rust自学】7.5. use关键字 Pt.2 :重导入与换国内镜像源教程
喜欢的话别忘了点赞、收藏加关注哦,对接下来的教程有兴趣的可以关注专栏。谢谢喵!(・ω・) 7.5.1. 使用pub use重新导入名称 使用use将路径导入作用域内后。该名称在词作用域内是私有的。 以上一篇文章的代码为例: m…...

自定义luacheck校验规则
安装运行环境 安装环境及源码解析,参考:LuaCheck校验原理解析 自定义校验规则 从代码中可以看出,定义一条规则有以下关键点: 需要定义告警信息:由键值对组成,key为告警编码(不一定为纯数字&…...

python钉钉机器人
上代码 #coding:utf-8 import sys import time import hmac import hashlib import base64 import urllib.parse import requeststimestamp str(round(time.time() * 1000)) secret 你的secret secret_enc secret.encode(utf-8) string_to_sign {}\n{}.format(timestamp, …...

汇编学习笔记
汇编 1. debug指令 -R命令(register) 查看、改变CPU寄存器的内容 r ax 修改AX中的内容 -D命令(display) 查看内存中的内容 -E命令(enter) 改写内存中的内容 -U命令(unassenble反汇编) 将内存中的机器指令翻译成汇编指令 -T命令(trace跟踪) 执行一条机器指令 -A命令…...

混合并行训练框架性能对比
混合并行训练框架性能对比 1. 框架类型 DeepSpeed、Megatron - LM、Colossal - AI、SageMaker、Merak、FasterMoE、Tutel、Whale、Alpa、DAPPLE、Mesh - TensorFlow 2. 可用并行性(Available parallelisms) DNN framework(深度神经网络框架)DP(数据并行,Data Parallelis…...

基于Docker+模拟器的Appium自动化测试(二)
模拟器的设置 打开“夜神模拟器”的系统设置,切换到“手机与网络”页,选中网络设置下的“开启网络连接”和“开启网络桥接模式”复选框,而后选择“静态IP”单选框,在IP地址中输入“192.168.0.105”,网关等内容不再赘述…...

数据结构之线性表之链表(附加一个考研题)
链表的定义 链表的结构: 单链表-初始化 代码实现: 单链表-头插法 代码实现: 这里我给大家分析一下 我们每创建一个新的节点都要插在头节点的后面,我们一定要注意顺序 一定要先让新节点指向头节点指向的下一个节点,…...

etmem
title: 聚焦 Etmem:高效内存管理的新引擎 date: ‘2024-12-31’ category: blog tags: Etmem内存管理性能优化系统资源 sig: storage archives: ‘2024-12’ author:way_back summary: Etmem 是一款专注于内存管理优化的创新工具,通过智能的内存分配、回…...

LangChain4j与Elasticsearch:构建高效的语义嵌入存储
LangChain4j与Elasticsearch:构建高效的语义嵌入存储 一、LangChain4j与Elasticsearch集成概述 1.1 LangChain4j简介 LangChain4j是一个为Java开发者设计的开源库,旨在简化大型语言模型(LLM)在Java应用程序中的集成。它提供了与…...

黄河小浪底水利枢纽泄洪预警广播系统正式上线
24小时站岗、危险自动报警、远程喊话驱离……近日,小浪底水利枢纽和西霞院水利枢纽的泄洪预警广播系统正式上线,通过数字化设施赋能管控水域日常监管,将危险水域各个角落“尽收眼底”,涉水危险行为“无处可藏”。 “前方船只请注意…...

理解生成协同促进?华为诺亚提出ILLUME,15M数据实现多模态理解生成一体化
多模态理解与生成一体化模型,致力于将视觉理解与生成能力融入同一框架,不仅推动了任务协同与泛化能力的突破,更重要的是,它代表着对类人智能(AGI)的一种深层探索。通过在单一模型中统一理解与生成ÿ…...

[文献阅读]ReAct: Synergizing Reasoning and Acting in Language Models
文章目录 摘要Abstract:思考与行为协同化Reason(Chain of thought)ReAct ReAct如何协同推理 响应Action(动作空间)协同推理 结果总结 摘要 ReAct: Synergizing Reasoning and Acting in Language Models [2210.03629] ReAct: Synergizing Reasoning an…...

摄像头监视脚本
摄像头监视脚本,若检测到摄像头画面有变化,保存这一段视频 一、使用方法 1.运行脚本 默认参数Threshold3, Period3, path./recordings python cam.py --threshold30 --period3 --path./recordings 2.参数说明 threshold:摄像头捕获到的画面变化量阈值…...

FreeRTOS的内存管理(选择heap4.c文件的理由)
目录 1. 了解FreeRTOS内存管理 2. 了解内存碎片 3.了解各个heap.c的内存分配方法 1.heap1.c 2.heap2.c 3.heap3.c 4.heap4.c 5.heap5.c 总结: 内存管理是一个系统基本组成部分,FreeRTOS 中大量使用到了内存管理,比如创建任务、信号量…...

SQL-leetcode-183. 从不订购的客户
183. 从不订购的客户 Customers 表: -------------------- | Column Name | Type | -------------------- | id | int | | name | varchar | -------------------- 在 SQL 中,id 是该表的主键。 该表的每一行都表示客户的 ID 和名称。 Orders 表&#…...
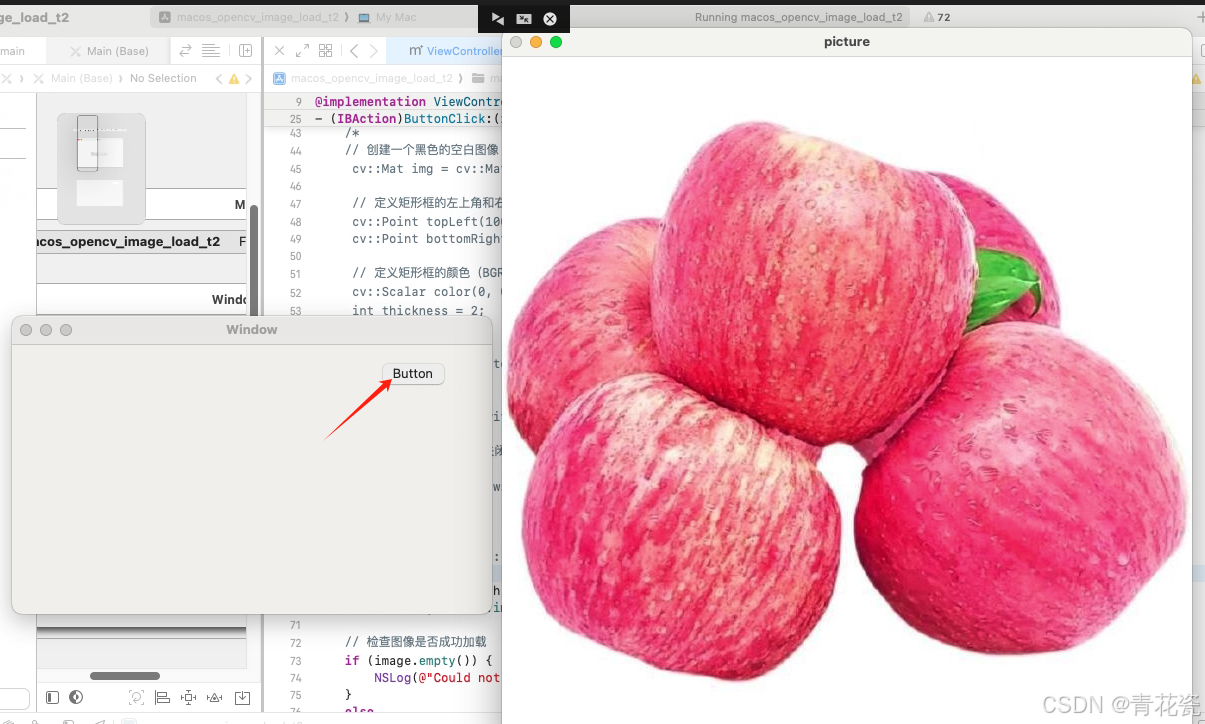
苹果系统MacOS下ObjectC建立的App程序访问opencv加载图片程序
前言 苹果系统下使用opencv感觉还是有些不太方便,总是感觉有点受到限制。本博客描述的是在MacOS下建立App程序然后调用opencv显示图片时出现的一些问题并最后解决的一个过程。 一、程序的建立 选择程序的类型: 选择界面模式和编程语言: 其余…...

《代码随想录》Day21打卡!
写在前面:祝大家新年快乐!!!2025年快乐,2024年拜拜~~~ 《代码随想录》二叉树:修剪二叉搜索树 本题的完整题目如下: 本题的完整思路如下: 1.本题使用递归进行求解,所以分…...
)
Unity交通仿真入门:从零到一搭建十字路口红绿灯与车辆AI(附完整C#源码)
Unity交通仿真实战:十字路口红绿灯与车辆AI开发指南 在游戏开发和城市模拟领域,交通仿真一直是个充满挑战又极具实用价值的课题。想象一下,你正站在一个繁忙的十字路口,观察着红绿灯有节奏地变换,车辆井然有序地通过—…...

10个实用技巧:PHP Font Lib 字体信息提取完全教程
10个实用技巧:PHP Font Lib 字体信息提取完全教程 【免费下载链接】php-font-lib A library to read, parse, export and make subsets of different types of font files. 项目地址: https://gitcode.com/gh_mirrors/ph/php-font-lib 想要在PHP项目中高效处…...

3大策略掌握Avidemux视频编辑:从源码编译到专业级处理
3大策略掌握Avidemux视频编辑:从源码编译到专业级处理 【免费下载链接】avidemux2 Avidemux2, simple video editor 项目地址: https://gitcode.com/gh_mirrors/avi/avidemux2 Avidemux是一款开源跨平台视频编辑工具,专注于快速剪辑、编码转换和批…...

STFT与小波变换深度对比:时频分析工具选型与实战指南
1. 项目概述:时频分析工具箱的深度对比在信号处理这个行当里,时频分析一直是个绕不开的核心话题。无论是处理一段音频、分析机械振动信号,还是解读脑电图数据,我们面对的信号往往不是一成不变的。它们内部的频率成分会随着时间推移…...

Windows 和 Ubuntu 安装 Hermes Agent 全攻略
文章目录【开场白】【先说重点:Hermes 和 OpenClaw 装机区别】【Windows 安装:5 步搞定】第 1 步:装 WSL2第 2 步:更新 Ubuntu 系统第 3 步:一键装 Hermes第 4 步:让环境变量生效第 5 步:初始化…...

Arduino与树莓派协同开发:通信协议、实战项目与物联网应用
1. 项目概述:当开源硬件“大脑”遇上“小脑”如果你玩过乐高,大概能理解那种把不同功能的模块拼装起来,实现一个有趣功能的乐趣。在开源硬件的世界里,Arduino Uno和Raspberry Pi(树莓派)系列,就…...

约瑟夫环问题C语言实现详解:从数组模拟到链表优化,新手避坑指南
约瑟夫环问题C语言实现详解:从数组模拟到链表优化,新手避坑指南 约瑟夫环问题是一个经典的算法挑战,它模拟了一个古老的历史场景:一群人围成一圈,按照特定规则逐个淘汰成员,直到最后一人幸存。对于C语言初学…...

全志T3工业级评估板深度评测:国产化、接口性能与Docker容器化实践
1. 开箱初探:一份诚意满满的工业级“全家桶”作为一名在嵌入式硬件开发领域摸爬滚打了十多年的老工程师,我经手过的评估板、开发板少说也有上百款。从早期的ARM9到现在的多核A系列、RISC-V,每次开箱都像是一次探险。但这次拿到创龙科技&#…...

Word怎么转PDF?2026年各类场景转换方法对比指南
Word文档转换成PDF格式已成为办公日常的标配需求。无论是制作正式报告、投递简历、还是与他人共享文件,PDF格式都因其兼容性强、排版稳定的特点成为首选。本文整理了2026年最实用的Word转PDF官方方法和各类转换工具,帮你快速找到适合自己的转换方案。Wor…...

如何在Windows 11上轻松安装Android应用?APK安装器完整教程
如何在Windows 11上轻松安装Android应用?APK安装器完整教程 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 想在Windows电脑上运行Android应用却不想安装笨…...