1.运控概述
以下并不是我原创(包括图片),都是来源于网络收集。如CSDN博主,朝夕教育,AI等。
什么是运动控制
运控是指“控制移动”之意,可以利用各种电机进行位置控制等操作,让机器听懂你的指令。
什么是运动控制接口板
是一个中间件,将你的指令传达给具体的实现设备。比如电脑输入了一个步进电机走十步的指令,接口板根据电脑输入的脉冲数量,转换成对应的步进量,让设备去实行。
它的主要任务是接收指令、翻译指令,然后让设备按指令动起来。
- 接收指令:比如你用C#编程告诉它“让这个电机转5圈”。
- 翻译指令:它会把你的指令转成机械能懂的信号(比如脉冲信号)。
- 发出指令:然后传给机械,让它动起来。
什么是电机驱动单元
这是用于驱动步进电机和伺服电机的控制单元。通过向驱动单元进行控制信号的设置/获取,从而进行电机控制。
什么是步进电机
它不像普通电机那样一直转,而是按照你的指令,一步一步地走,每一步都很精确。是可高精度定位的电机,与输入脉冲同步,呈阶梯状地一点点旋转一定角度。由于步进电机根据输入脉冲准确旋转,所以无需旋转量检测就能够高精度定位。一般的分辨率是:1步(1个脉冲)= 1.8°、 0.72°、0.36°等。
什么是步进角
向电机驱动器输入1个脉冲时步进电机转动的角度。一般精度分为:1步(1个脉冲)= 1.8°、 0.72°、0.36°等。
什么是转速
步进电机转动的速度
什么是失步
控制器要求步进十步,但只走了八步,未走的两步叫失步。
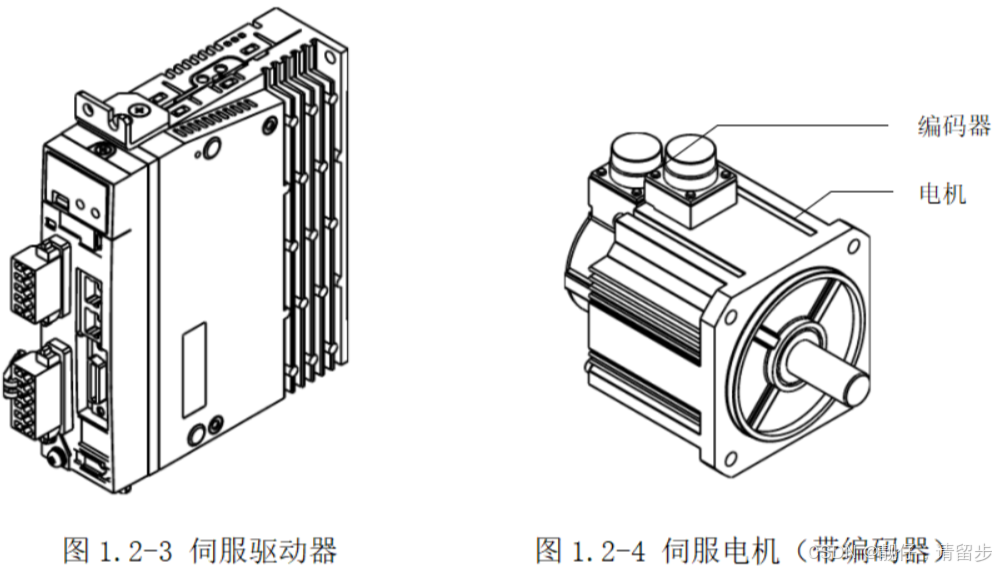
什么是伺服电机
是一种“更聪明、更听话”的电机。它不仅能像普通电机那样转动,还能精准控制转速、位置和力矩,而且知道自己“转到了哪儿”或者“用多大力”,所以经常用在需要高精度控制的场景。
伺服电机分为交流伺服电机和直流伺服电机,具备检测转角的编码器,进行闭环高精度的定位。
什么是编码器输入
是运动控制系统中用于反馈位置、速度或方向信息的关键组件。编码器是一种传感器,它能够将机械位移转换为电信号,从而提供有关旋转轴或线性运动的详细信息。编码器通常分为两种主要类型:增量型编码器和绝对型编码器。
编码器输入的主要功能是接收编码器反馈的信息,并将这些信息用于控制和监测设备的动作,比如:
- 控制电机的位置:知道电机转到了哪儿。
- 调节电机的速度:确保转速符合要求。
- 修正动作的误差:如果偏离了目标位置,可以通过反馈信号重新调整。
编码器输入是怎么工作的
- 编码器发送信号:编码器会根据运动状态产生一系列脉冲信号或电压信号,表示当前的位置或速度。
- 设备接收信号:这些信号通过编码器输入端口进入控制系统,比如PLC或驱动器。
- 分析信号:系统根据接收到的信号计算出实际的位置和速度。如果和设定值有差异,控制器会调整设备的运行状态。
主要用途
- 从伺服电机输出脉冲→管理/控制位置信息
- 步进电机的失步检测
脉冲输出信号/输出格式
- 两脉冲方式(独立脉冲输出)
这是输出正方向用(CW)、负正方向用(CCW)2种独立脉冲信号,进行控制的方式。CW(Clock Wise)表示顺时针旋转(右旋),CCW(Counter Clock Wise)表示反时针方向(左旋)。
- OUT(提前脉冲输出)、DIR(滞后脉冲输出)方式
输出OUT(提前脉冲输出)信号和DIR(滞后脉冲输出)信号。当DIR与OUT相位相差+90°时,朝正方向(顺时针方向)动作(旋转)。当DIR与OUT相位相差-90°时,朝负方向(反时针方向)动作(旋转)。
多轴同步、接口板间多轴同步
运动控制接口板能够对多个轴之间的同时开始/停止进行同步控制。此外,连接的同步控制线缆,多可进行16块(128个轴)的同步控制。使用8轴接口板时,还可以4轴为单位分组。
限位输出
限位输出其实就是用来检测电机的停止点、减速点和原点,通过反馈信号实现高精度定位控制,防止设备过冲或超出安全范围运行,确保系统动作精准可靠。
+SD / -SD(方向减速)
就是在电机接近运动范围的某个方向极限时,提前触发信号让电机慢下来(减速),以防止过冲或撞到限位点。
ORG(原点限位)的作用
- 归零点:ORG是电机或者机械设备的“归零点”,用于校准和初始化设备的位置。
————比如,数控机床开机时,需要找到“原点”,让设备知道刀具的初始位置。 - 定位基准:ORG是所有运动和定位的基准点。设备以原点为参考来计算后续的绝对位置。
- 复位操作:在发生故障或重启时,通过返回原点(回原点操作)来让设备恢复到一个已知的状态,避免偏移或误差累积。
PTP动作
PTP动作(Point-to-Point Motion),用简单来说,就是让电机或者机械臂从一个点移动到另一个点,而不在意它怎么走过去,只要到达目标点就行。这种运动模式追求快速和高效,而不是轨迹的精确控制。
JOG动作
JOG动作(Jogging Motion),用简单话来说,就是点动操作,让电机或者机械设备以连续、低速、可控的方式移动。通常用在调试、测试或设备微调时。电机从起始速度开始运行,加速至最大速度后连续运动;只有当接收到停止指令或外部停止信号后,才减速停止。连续运动指令其实就是速度控制指令。
ORG动作
ORG(原点复位)动作是使电机移动到原点的动作。
运动控制分类
根据有无反馈和如何反馈可以分为开环控制系统、闭环控制系统和半闭环控制系统三类。
-
开环控制系统:
是一种没有反馈机制的控制系统,它根据预设指令执行操作而不监测或调整输出结果。这种系统的设计基于一个假设:系统的输入与预期输出之间存在确定的关系,并且在运行过程中不会受到外部干扰或变化的影响。 -
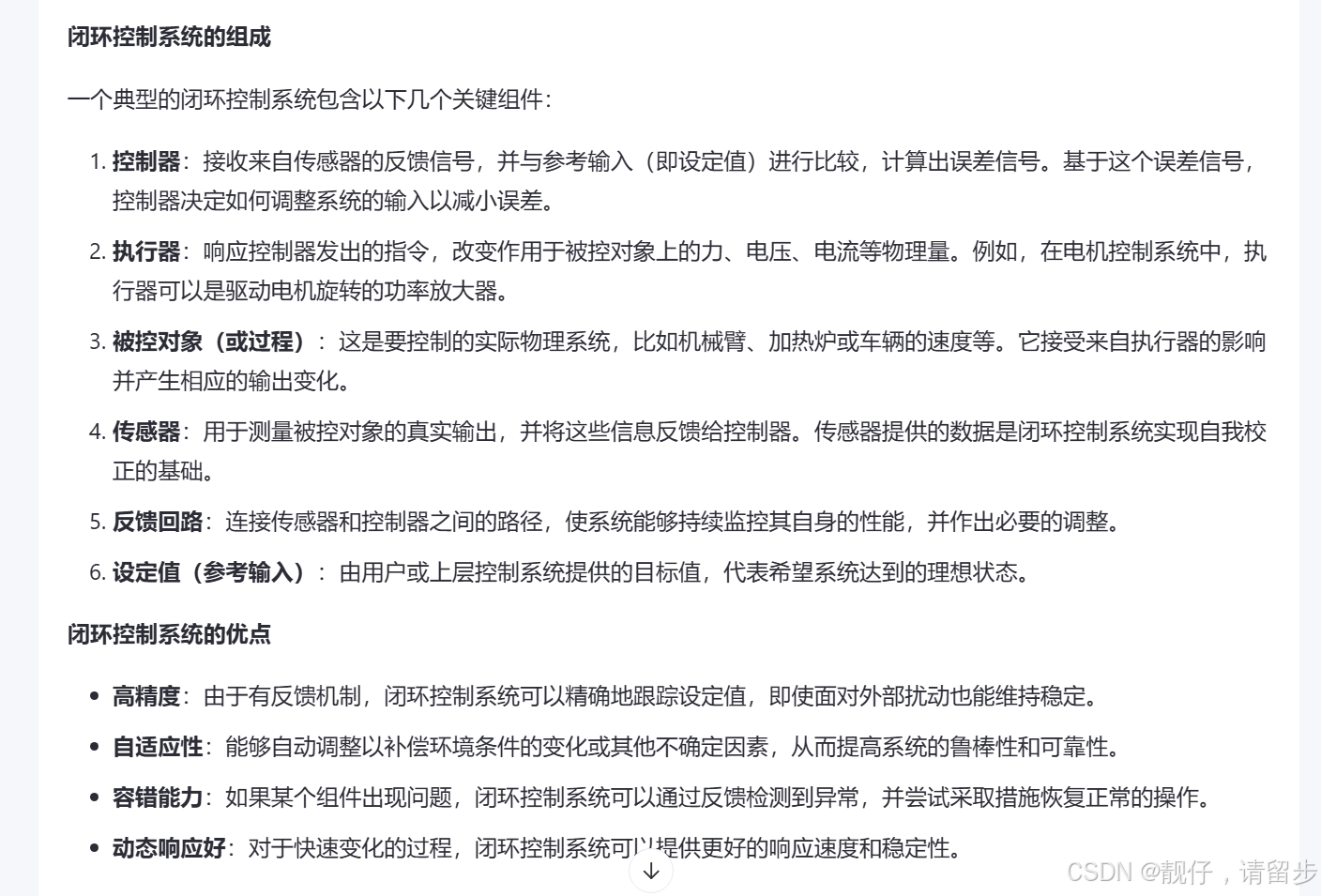
闭环控制系统(也称为反馈控制系统):是一种通过监测输出并与期望的设定值进行比较,然后根据差异调整输入来纠正偏差的系统。这种控制方式能够自动调节和优化系统的性能,确保输出尽可能接近所需的设定值,即使在存在干扰或不确定性的情况下也能保持良好的控制精度。
-
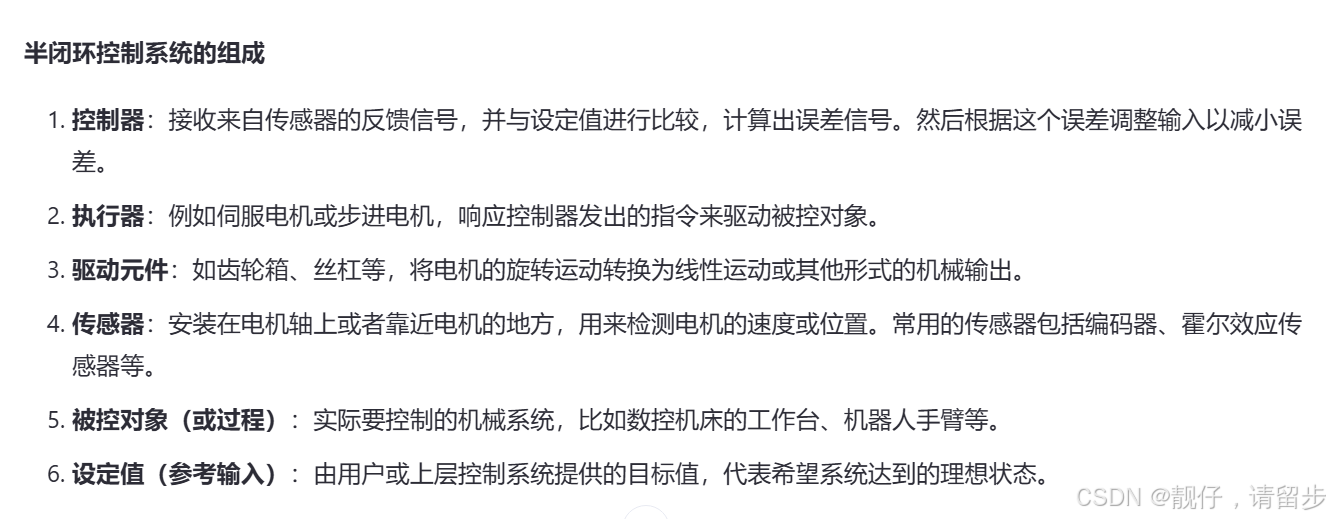
半闭环控制系统(也称为半封闭环控制系统):是一种介于开环控制系统和全闭环控制系统之间的控制方式。它通常用于运动控制系统中,特别是在需要高精度位置或速度控制的应用场景下。半闭环控制系统的主要特点是在执行器之后、但不在最终输出端之前进行反馈测量。这意味着传感器不是直接监测最终的机械输出(如工作台的实际位置),而是监测驱动元件的状态(如电机轴的位置或速度)。
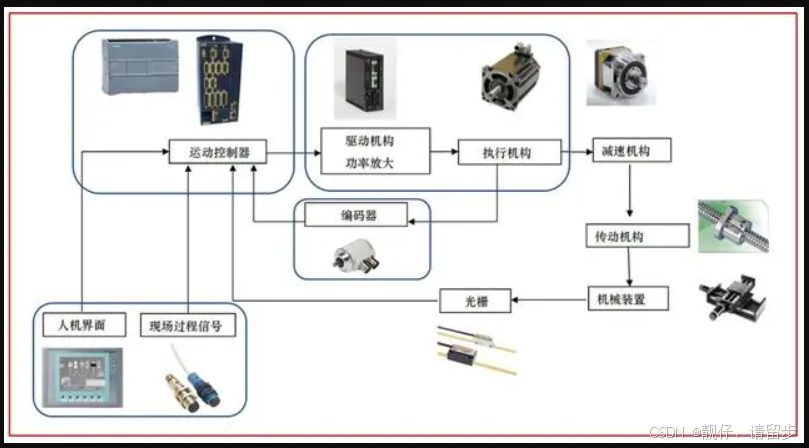
运动控制器
运动控制器是运动控制系统的核心部件,负责产生运动路径的控制指令,用于设备的逻辑控制,将运动参数分配给需要运动的轴,并对被控对象的外部环境变化及时做出响应。
通用运动控制器通常都提供一系列运动规划方法,基于对冲击、加速度和速度等这些可影响动态轨迹精度的量值加以限制,提供对运动控制过程的运动参数的设置和运动相关的指令,使其按预先规定的运动参数和规定的轨迹完成相应的动作。
运动控制器通过一定的通信手段将控制信号或命令发送给驱动器,驱动器为执行机构(通常为电机)提供转动能源动力,运动控制器接收并且分析反馈信号,得到跟随误差后,根据控制器的算法,产生减小误差的控制信号,从而提高了运动控制的精度。典型的控制器有下几类:PLC可编程逻辑控制器、专用的运动控制器。
驱动器
驱动器是运动控制系统的转换装置,用于将来自运动控制器的控制信号转换为执行机构的运动,典型的驱动器如变频器、步进驱动器、伺服驱动器。
控制器产生的命令信号是微小信号,通过驱动器放大这些信号以满足电机的工作需求,故伺服驱动器(servo drives)又称为“伺服控制器”或“伺服放大器”,属于伺服系统的一部分,主要应用于高精度的定位系统。
伺服驱动器一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度传动系统的控制。尤其是应用于交流永磁同步电机控制的伺服驱动器已经成为国内广泛采用的产品。伺服驱动器的调速范围宽、精度高、可靠性高,还提供多种参数供用户调节。
步进驱动器是将接收到的运动指令转换为步进电机的角位移(对应步距角)的执行机构。通常情况下接收对应位移的脉冲信号时,当步进驱动器接收到一个脉冲信号,按设定的方向转动一个步距角,它的旋转是以固定的角度一步一步运行的。外部控制器可以通过控制脉冲个数来控制步进电机的角位移量,从而达到调速和定位的目的。步进系统被广泛应用于雕刻机、电脑绣花机、数控机床、包装机械、点胶机、切料送料系统、测量仪器等设备上。
执行机构
执行机构是运动控制系统中的控制对象,用于将驱动信号转换为位移、旋转等,执行机构通过一些机械机构连接,实现控制对象的运动。常见的执行机构如各种类型的电机、液压、启动设备。
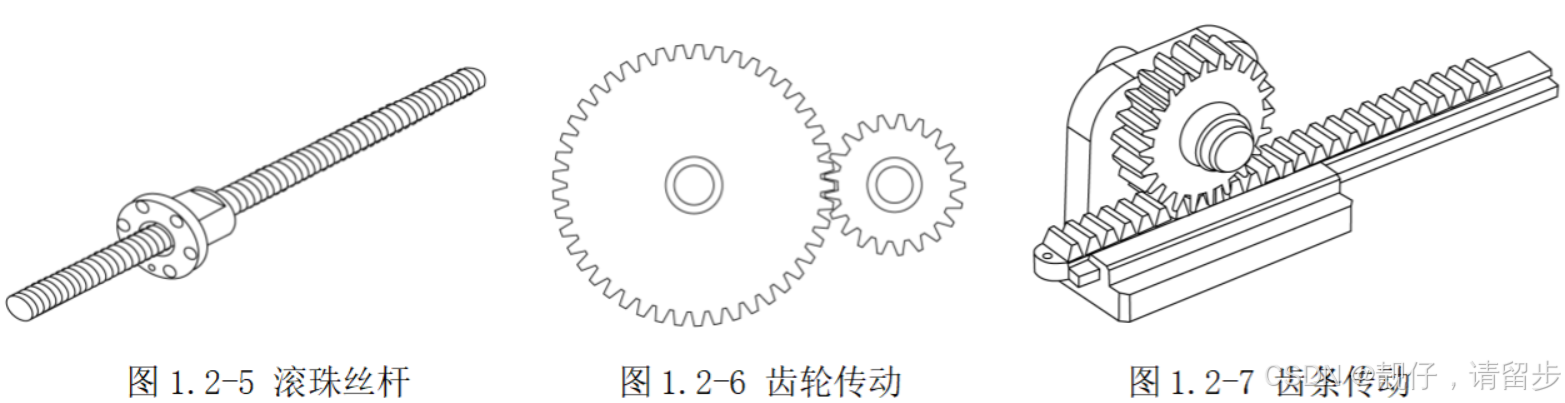
常见的传动机构有:滚珠丝杆、齿轮传动、齿条传动、带传动、丝杆传动,链传动、液压传动、气压传动等。
电机主要分为步进电机和伺服电机,二者的控制方式不同,步进电机通过控制脉冲的个数控制转动角度的,一个脉冲对应一个步距角。伺服电机通过控制定子电角度的旋转,带动转子的旋转,并经过编码器的反馈构成闭环,从定位到目标角度。伺服电机运行平稳,还具有较强的过载能力,各方面性能优于步进电机。
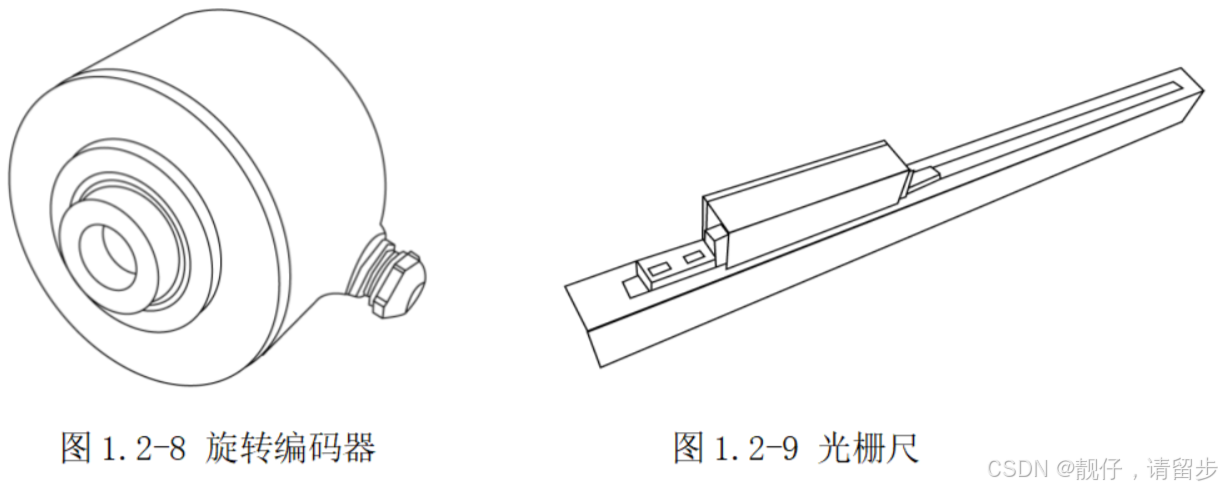
反馈装置
反馈装置是运动控制系统中进行检测并处理反馈的装置,主要反馈的是负载的位置和速度,例如编码器、光栅尺等,编码器是一种非常常见的反馈装置。伺服电机一般自带编码器,如图1.2-4左侧模块,编码器用于反馈电机的实际运行情况,例如电机的当前位置和速度。
相关文章:
1.运控概述
以下并不是我原创(包括图片),都是来源于网络收集。如CSDN博主,朝夕教育,AI等。 什么是运动控制 运控是指“控制移动”之意,可以利用各种电机进行位置控制等操作,让机器听懂你的指令。 什么是…...

DuckDB:密钥管理器及其应用
密钥管理器(Secrets Manager)为所有使用密钥的后端提供了统一的用户界面。密钥信息可以被限定范围,因此不同的存储前缀可以有不同的密钥信息,例如允许在单个查询中连接跨组织的数据。密钥也可以持久化,这样就不需要在每次启动DuckDB时都指定它…...

单元测试4.0+思路总结
Jmockit使用笔记_增加代码覆盖率_覆盖try catch_使用new MockUp私有方法-CSDN博客 一般使用new MockUp模拟被测试代码中的私有方法(常用) 使用new Expetations模拟被测试代码中的方法?...

epoll 水平ET跟边缘LT触发的区别是什么
epoll默认的是水平触发 意思就是当我们depoll默认的是水平触发 LT 模式(水平触发) 工作机制:在 LT 模式下,只要文件描述符(例如套接字)对应的 I/O 缓冲区中有数据可读或者可写空间(对于写操作…...

设计模式 创建型 单例模式(Singleton Pattern)与 常见技术框架应用 解析
单例模式(Singleton Pattern)是一种创建型设计模式,旨在确保某个类在应用程序的生命周期内只有一个实例,并提供一个全局访问点来获取该实例。这种设计模式在需要控制资源访问、避免频繁创建和销毁对象的场景中尤为有用。 一、核心…...

Java项目实战II基于微信小程序的家庭大厨(开发文档+数据库+源码)
目录 一、前言 二、技术介绍 三、系统实现 四、核心代码 五、源码获取 全栈码农以及毕业设计实战开发,CSDN平台Java领域新星创作者,专注于大学生项目实战开发、讲解和毕业答疑辅导。 一、前言 在快节奏的生活中,家庭聚餐成为了连接亲情…...

【JVM】总结篇-字节码篇
字节码篇 Java虚拟机的生命周期 JVM的组成 Java虚拟机的体系结构 什么是Java虚拟机 虚拟机:指以软件的方式模拟具有完整硬件系统功能、运行在一个完全隔离环境中的完整计算机系统 ,是物理机的软件实现。常用的虚拟机有VMWare,Visual Box&…...

HTML——28.音频的引入
<!DOCTYPE html> <html><head><meta charset"UTF-8"><title>音频引入</title></head><body><!--audio:在网页中引入音频当属性名和属性值一样,可以只写属性名src属性:指定音频文件路径,必…...

Visual Point Cloud Forecasting enables Scalable Autonomous Driving——点云论文阅读(12)
此内容是论文总结,重点看思路!! 文章概述 这篇文章介绍了一个名为 ViDAR 的视觉点云预测框架,它通过预测历史视觉输入生成未来点云,作为自动驾驶的预训练任务。ViDAR 集成了语义、三维几何和时间动态信息,有效提升了感知、预测和规划等自动驾驶核心任务的性能。实验表明…...

《Xsens动捕与人形机器人训练》讲座将于1月9日下午2:30在线上召开
《Xsens动捕与人形机器人训练》讲座将于1月9日下午2:30在线上召开,本次讲座中来自Xsens的人形机器人与动捕技术专家Jeffrey Muller与Dennis Kloppenburg不仅将就Xsens动作捕捉系统与人形机器人行为训练中的实际应用进行详细讲解,同时还会对目前大家所关注…...

Mac 安装 Flutter 提示 A network error occurred while checking
错误信息 A network error occurred while checking "https://maven.google.com/": Operation timed out原因 在中国大陆(由于访问 Google 服务器的限制导致超时),无法连接到 https://maven.google.com/ 解决方案 需要使用镜像网站 #flutter 使用国内的镜像 export …...

形态学:图像处理中的强大工具
在图像处理中,形态学(Morphology) 是一类基于形状的操作,主要用于提取、分析和处理图像中的几何结构。尽管形态学操作最初是为二值图像设计的,但它也可以应用于灰度图像,帮助提取图像中的结构特征。形态学操…...

树莓派 Pico RP2040 教程点灯 双核编程案例
双核点亮不同的 LED 示例,引脚分别是GP0跟GP1。 #include "pico/stdlib.h" #include "pico/multicore.h"#define LED1 0 // 核心 0 控制的 LED 引脚 #define LED2 1 // 核心 1 控制的 LED 引脚// the setup function runs once when you press …...

2024年大型语言模型(LLMs)的发展回顾
2024年对大型语言模型(LLMs)来说是充满变革的一年。以下是对过去一年中LLMs领域的关键进展和主题的总结。 GPT-4的壁垒被打破 去年,我们还在讨论如何构建超越GPT-4的模型。如今,已有18个组织拥有在Chatbot Arena排行榜上超越原…...

实现单例模式的五种方式
如何实现一个单例 1、构造器需要私有化 2、提供一个私有的静态变量 3、暴露一个公共的获取单例对象的接口 需要考虑的两个问题 1、是否支持懒加载 2、是否线程安全 1、饿汉式 public class EagerSingleton {private static final EagerSingleton INSTANCE new EagerSi…...

pcl源码分析之计算凸包
文章目录 前言一、应用案例二、源码分析1.ConvexHull类2.reconstruct函数3.performReconstruction 函数4.calculateInputDimension 函数 总结 前言 本文分析一下pcl里凸包的源码。什么是凸包以及怎么求解,可以了解一下概念。 一、应用案例 #include <pcl/surfa…...

在K8S中,Pod请求另一个Pod偶尔出现超市或延迟,如何排查?
在Kubernetes中,当Pod请求另一个Pod时偶尔出现超时或延迟,可能是由于多种原因造成的。以下是一些建立的排查步骤: 1. 检查网络配置和插件: 确认你的kubernetes集群使用了合适的网络插件(如Calico、Flannel等…...

3blue1brow线代笔记
向量 物理:空间中的箭头,长度和方向决定一个向量。只要两者相同,可以任意移动保持不变 计算机:有序的数字列表 (数组) 数学:向量可以是任何东西,只要保证两个向量相加以及数字与向量…...

【前端系列】优化axios响应拦截器
文章目录 一、前言🚀🚀🚀二、axios响应拦截器:☀️☀️☀️2.1 为什么前端需要响应拦截器element ui的消息组件 一、前言🚀🚀🚀 ☀️ 回报不在行动之后,回报在行动之中。 这个系列可…...

SQL使用视图
本文将介绍什么是视图,它们怎样工作,何时使用它们。 1. 视图 视图是虚拟的表。与包含数据的表不一样,视图只包含使用时动态检索数据的查询。 说明:SQLite 的视图 SQLite 仅支持只读视图,所以视图可以创建ÿ…...

BurpSuite 2025插件开发JDK版本兼容性实战指南
1. 为什么BurpSuite插件开发环境总在JDK版本上翻车?你是不是也经历过:下载好BurpSuite最新版2025.4,兴冲冲打开插件开发文档,照着官方示例写完第一个HelloWorld插件,一编译——java.lang.UnsupportedClassVersionError…...
到panic:深入Linux 5.4内核,看异常处理如何层层递进)
从BUG()到panic:深入Linux 5.4内核,看异常处理如何层层递进
从BUG()到panic:Linux内核异常处理的防御体系全解析当你在深夜调试一个内核模块时,突然屏幕刷出一串红色警告——这可能是每个Linux内核开发者都经历过的噩梦时刻。但你是否想过,从第一行警告出现到系统完全崩溃,内核究竟经历了怎…...

HarmonyOS ArkTS DateUtil 日期增减与日历计算完整指南
文章目录 背景一、引言二、日期增减方法详解使用示例 三、日历计算方法详解四、Demo 演示:日期增减结果展示五、Demo 演示:月历视图完整实现六、日历视图关键点解析为什么要填充前置空格?getLastDayOfMonth 的实现技巧 七、小结 背景 近期发现…...

为什么92%的团队用DeepSeek生成方案仍需人工重写?揭秘缺失的2个元认知层与1套校验协议
更多请点击: https://intelliparadigm.com 第一章:为什么92%的团队用DeepSeek生成方案仍需人工重写?揭秘缺失的2个元认知层与1套校验协议 当团队将DeepSeek-R1或DeepSeek-VL模型用于技术方案生成时,表面看响应迅速、逻辑连贯&…...
)
Mysql:事务管理(中)
在前面的章节中,我们提到了 MVCC(多版本并发控制),它巧妙地通过“版本快照”解决了“读-写”冲突,实现了非阻塞读。但如果两个事务同时执行 UPDATE 操作修改同一行数据,即 写-写(Write-Write&am…...

终极指南:5步快速掌握免费的3D点云标注工具labelCloud
终极指南:5步快速掌握免费的3D点云标注工具labelCloud 【免费下载链接】labelCloud A lightweight tool for labeling 3D bounding boxes in point clouds. 项目地址: https://gitcode.com/gh_mirrors/la/labelCloud 想要为自动驾驶、机器人视觉或3D目标检测…...

BiliRoamingX:彻底解决B站体验限制的完整增强方案
BiliRoamingX:彻底解决B站体验限制的完整增强方案 【免费下载链接】BiliRoamingX-integrations BiliRoamingX integrations and patches powered by ReVanced. 项目地址: https://gitcode.com/gh_mirrors/bi/BiliRoamingX-integrations 你是否曾为B站的内容区…...

别再只比参数了!从插件生态到中文优化,聊聊ChatGPT和文心一言的“隐形”差异
超越参数之争:ChatGPT与文心一言的生态与本土化实战解析 当技术评测文章还在反复比较模型参数量与发布时间时,真正影响日常工作效率的往往是那些未被量化的"软实力"。本文将从插件生态构建与中文场景优化两个维度,带您重新认识这两…...
【php语法学习,iscc校赛wp】)
学习日志(三)【php语法学习,iscc校赛wp】
1. 任务 1.1.1.1.1.1. 知识部分 rce看【之前的笔记?】php的知识点学习继续jwt token好像是比赛的题目考察内容,我看看php伪协议 1.1.1.1.1.2. 题目 参加iscc比赛【五一】rce题目 1.1.1.1.1.3. 环境配置 把vscode搞好,上学期没有把Php配…...

人工智能的伦理与安全:这3个问题,软件测试从业者必须重视
随着大语言模型、生成式AI的爆发式落地,人工智能已经从实验室走向千行百业的生产场景,深刻改变着软件开发与交付的逻辑。对于直接把控产品质量关口的软件测试从业者来说,我们的职责早已不再是单纯验证功能可用性、排查性能bug那么简单——AI系…...