如何使用OpenCV进行抓图-多线程
前言
需求:
1、如何使用OpenCV捕抓Windows电脑上USB摄像头的流、
2、采用多线程
3、获知当前摄像头的帧率。
这个需求,之前就有做了,但是由于出现了一个问题,人家摄像头的帧率目前都可以达到60帧/s 了,而我的程序获取的却还只能获取20帧/s ,那么肯定就是存在问题了。所以,目前采用了一些办法进行解决,能充分发挥其60帧/s 的优势,并能打出帧率。下面开始详细阐述。
正文
一、环境
1、Win10
2、Qt 5.8.0 MSVC2015
3、OpenCV VS2015编译的
二、效果展示
三、关键代码
1、抓图线程:
bool CCameraCaptureThd::Init()
{int index = 5;while (true){m_bInit = m_capture.open(0+cv::CAP_DSHOW, cv::CAP_ANY); // 打开默认摄像头m_capture.set(cv::CAP_PROP_FRAME_WIDTH, 1280);m_capture.set(cv::CAP_PROP_FRAME_HEIGHT, 720);m_capture.set(cv::CAP_PROP_FOURCC, cv::VideoWriter::fourcc('M', 'J', 'P', 'G'));if (m_bInit){return true;}else{index--;QThread::sleep(1);if (index < 0){qDebug() << "--> Failed to initialize camera!";return false;}}}return true;
}void CCameraCaptureThd::StartCapture()
{m_bCapture = true;double dExpore = m_capture.get(cv::CAP_PROP_EXPOSURE);double dBrightness = m_capture.get(cv::CAP_PROP_BRIGHTNESS);qDebug() << "---> dExpore:"<<dExpore<<"||"<<dBrightness;
}void CCameraCaptureThd::StopCapture()
{m_bCapture = false;
}bool CCameraCaptureThd::SetCameraBrightness(const int &_iBrightness)
{bool bRet = false;if (false == m_capture.isOpened()){return bRet;}qDebug() << "---> CCameraCaptureThd::SetCameraBrightness _iBrightness:"<<_iBrightness;bRet = m_capture.set(cv::CAP_PROP_BRIGHTNESS, _iBrightness);double dBrightness = m_capture.get(cv::CAP_PROP_BRIGHTNESS);qDebug() << "---> CCameraCaptureThd dBrightness:"<<dBrightness;return bRet;
}bool CCameraCaptureThd::SetCameraExposure(const int &_iExposure)
{bool bRet = false;if (false == m_capture.isOpened()){return bRet;}qDebug() << "---> CCameraCaptureThd::SetCameraExposure _iExposure:"<<_iExposure;bRet = m_capture.set(cv::CAP_PROP_EXPOSURE, _iExposure);double dExpore = m_capture.get(cv::CAP_PROP_EXPOSURE);qDebug() << "---> CCameraCaptureThd dExpore:"<<dExpore;return bRet;
}void CCameraCaptureThd::run()
{std::thread captureThread(&CCameraCaptureThd::captureThreadFunc, this);captureThread.detach(); // 捕获线程独立运行while (!m_bExit){cv::Mat frame;{std::unique_lock<std::mutex> lock(m_mtxQueue);if (m_frameQueue.empty()){m_cvQueue.wait(lock, [this] { return !m_frameQueue.empty() || m_bExit; });}if (m_bExit) break;frame = m_frameQueue.front();m_frameQueue.pop();}if (!frame.empty()){processFrame(frame);calculateFps(); // 每处理一帧计算一次 FPS}}
}void CCameraCaptureThd::captureThreadFunc()
{while (!m_bExit){cv::Mat frame;if (m_capture.isOpened() && m_bCapture){m_capture.read(frame);if (frame.empty() || !_CheckMat(frame)){if (!m_bWrongCamera){emit SIGNAL_CameraWrong();m_bWrongCamera = true;}continue;}std::lock_guard<std::mutex> lock(m_mtxQueue);if (m_frameQueue.size() >= m_maxQueueSize){m_frameQueue.pop(); // 丢弃旧帧}m_frameQueue.push(frame);m_cvQueue.notify_one();}QThread::msleep(m_iImageCaptureSleepTime);}
}void CCameraCaptureThd::processFrame(const cv::Mat& frame)
{cv::Mat processedFrame;frame.copyTo(processedFrame);cv::cvtColor(processedFrame, processedFrame, cv::COLOR_BGR2RGB);cv::flip(processedFrame, processedFrame, 1); // Y 轴翻转QImage img = QImage((uint8_t*)processedFrame.data, processedFrame.cols, processedFrame.rows, QImage::Format_RGB888).copy();//qDebug() << "---> processFrame:"<<QDateTime::currentMSecsSinceEpoch();emit SIGNAL_UpdateRgbImage(img);
}void CCameraCaptureThd::calculateFps()
{++m_frameCount;auto now = std::chrono::steady_clock::now();double elapsedTime = std::chrono::duration_cast<std::chrono::milliseconds>(now - m_startTime).count();if (elapsedTime >= 1000.0) // 每秒更新一次 FPS{m_currentFps = m_frameCount * (1000.0 / elapsedTime);m_frameCount = 0;m_startTime = now;qDebug() << "Current FPS:" << m_currentFps;emit SIGNAL_FrameRate(m_currentFps);}
}bool CCameraCaptureThd::_CheckMat(const cv::Mat& mat)
{return !mat.empty() && mat.cols > 0 && mat.rows > 0;
}
最关键的就是run里面的函数了。
四、遇到的问题
1、帧率怎么都上不去
解决方案:更改了相机打开时的设置
更改成这样:
m_bInit = m_capture.open(0+cv::CAP_DSHOW, cv::CAP_ANY); // 打开默认摄像头
m_capture.set(cv::CAP_PROP_FRAME_WIDTH, 1280);
m_capture.set(cv::CAP_PROP_FRAME_HEIGHT, 720);
m_capture.set(cv::CAP_PROP_FOURCC, cv::VideoWriter::fourcc('M', 'J', 'P', 'G'));
如果是这样的,帧率就会上不去:
m_capture.set(cv::CAP_PROP_FOURCC, cv::VideoWriter::fourcc('M', 'J', 'P', 'G'));
m_bInit = m_capture.open(0+cv::CAP_DSHOW, cv::CAP_ANY); // 打开默认摄像头
m_capture.set(cv::CAP_PROP_FRAME_WIDTH, 1280);
m_capture.set(cv::CAP_PROP_FRAME_HEIGHT, 720);
通过查询,问题的原因应该在:
属性设置的顺序如何影响帧率
- 属性的优先级问题:
- 摄像头通常优先处理某些属性。例如:
- 分辨率 (
FRAME_WIDTH,FRAME_HEIGHT) 是基础属性,影响图像传感器的输出格式。- 编码格式 (
FOURCC) 决定图像流的压缩方式。- 如果先设置分辨率,然后设置编码格式,编码器会根据新分辨率重新调整帧率。
- 反之,如果先设置编码格式,随后更改分辨率,驱动可能无法实时适配,导致性能下降。
- 驱动和硬件内部调整机制:
- 摄像头驱动程序在每次设置参数时,可能会重新协商帧率。例如:
- 设置分辨率后,驱动需要查询硬件支持的最大帧率。
- 如果在分辨率设置之前先设置编码格式,驱动可能会选择一个默认分辨率(通常较低),随后改变分辨率会导致帧率调整。
- 参数依赖性问题:
- 某些参数依赖于其他参数。例如:
- 不同的编码格式支持的最大帧率和分辨率是不同的。
- MJPG(Motion JPEG)通常支持高分辨率和高帧率,但 YUV 格式可能性能较低。
- 初始化次序影响驱动的行为:
- 驱动可能在第一次设置后锁定某些参数。如果设置顺序错误,后续参数可能不会生效,或需要额外的时间重新初始化。
- 例如,先设置编码格式再设置分辨率,可能触发两次完整的驱动初始化。
正确的设置顺序建议
为了确保帧率最大化,可以按照以下顺序设置参数:
- 设置分辨率:
- 首先设置分辨率 (
FRAME_WIDTH和FRAME_HEIGHT),确保摄像头硬件和驱动调整到正确的传感器输出。- 设置帧率(如果需要):
- 如果特定帧率是关键要求,可以尝试显式设置帧率(
cv::CAP_PROP_FPS)。- 设置编码格式:
- 最后设置编码格式 (
FOURCC),以确保基于之前设置的分辨率和帧率进行编码。
还有另一个原因,就是我抓图与处理的线程处于同一个,这样也会拉低整个线程处理的效率。
2、调整USB摄像头的亮度与曝光,出现意外情况
若不按照先调曝光再调增益的顺序,有可能出现调整曝光错乱的情况,原因未知。
目前按照的逻辑是,若想亮起来,则为:曝光:0 + 亮度:64
若想暗下来,则为:曝光:-13 + 亮度:-64
五、资源
https://github.com/calorsol/QtDemo/tree/master/OpenCVCaptureTest
参考
相关文章:
如何使用OpenCV进行抓图-多线程
前言 需求: 1、如何使用OpenCV捕抓Windows电脑上USB摄像头的流、 2、采用多线程 3、获知当前摄像头的帧率。 这个需求,之前就有做了,但是由于出现了一个问题,人家摄像头的帧率目前都可以达到60帧/s 了,而我的程序…...

电子应用设计方案86:智能 AI背景墙系统设计
智能 AI 背景墙系统设计 一、引言 智能 AI 背景墙系统旨在为用户创造一个动态、个性化且具有交互性的空间装饰体验,通过融合先进的技术和创意设计,提升室内环境的美观度和功能性。 二、系统概述 1. 系统目标 - 提供多种主题和风格的背景墙显示效果&…...

【《python爬虫入门教程11--重剑无峰168》】
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 【《python爬虫入门教程11--selenium的安装与使用》】 前言selenium就是一个可以实现python自动化的模块 一、Chrome的版本查找?-- 如果用edge也是类似的1.chrome…...

.net core 线程锁,互斥锁,自旋锁,混合锁
线程锁、互斥锁、自旋锁和混合锁是多线程编程中的重要概念,它们用于控制对共享资源的访问,避免数据竞争和不一致性。每种锁有其特定的适用场景和特点。我们来逐一解释它们,并进行比较。 1. 线程锁(Thread Lock) 线程…...
【DevOps】Jenkins项目发布
Jenkins项目发布 文章目录 Jenkins项目发布前言资源列表基础环境一、Jenkins发布静态网站1.1、项目介绍1.2、部署Web1.3、准备gitlab1.4、配置gitlab1.5、创建项目1.6、推送代码 二、Jenkins中创建gitlab凭据2.1、创建凭据2.2、在Jenkins中添加远程主机2.3、获取gitlab项目的UR…...

C# OpenCV机器视觉:霍夫变换
在一个阳光灿烂得近乎放肆的午后,阿强的实验室就像被施了魔法的科学城堡,到处闪耀着神秘的科技光芒。阿强呢,像个即将踏上惊险征程的探险家,一屁股坐在那堆满奇奇怪怪设备的桌前,眼神中透露出按捺不住的兴奋劲儿&#…...
)
Kraft模式安装Kafka(含常规、容器两种安装方式)
一、#创作灵感# 公司使用Kafka的软件项目较多,故写技术笔记巩固知识要点 二、软件环境 - Kafka 3.9.0 官方下载地址:Kafka 3.9.0 - Docker Desktop 4.37 容器图形化工具 官方下载地址:Docker Desktop 4.37 特别说明 - Docker Desktop…...
Linux驱动开发(16):输入子系统–电容触摸驱动实验
有关电容触摸的基础知识内容可以参考野火STM32相关教程,这里只介绍电容触摸驱动的相关内容。 本章配套源码、设备树以及更新固件位于“~/embed_linux_driver_tutorial_imx6_code/linux_driver/touch_scream_GTxxx”目录下。 触摸面板通过双面胶粘在显示屏上&#…...
:椭圆曲线密码学)
《深入浅出HTTPS》读书笔记(24):椭圆曲线密码学
《深入浅出HTTPS》读书笔记(24):椭圆曲线密码学 为了保证DH的密钥对不被破解,提升安全性的主要手段就是增加密钥对的长度,但是长度越长,性能越低。 为了解决性能问题,需要…...

现代光学基础5
总结自老师的讲义 yt5 开卷考试复习资料:光探测器与光伏技术 目录 光探测器(Photodetector) 工作原理二极管电路连接方式响应度(Responsivity)微弱光检测超导纳米线单光子探测光电二极管噪声 太阳能电池࿰…...

力扣hot100——贪心
121. 买卖股票的最佳时机 class Solution { public:int maxProfit(vector<int>& a) {if (a.size() 1) return 0;int ans 0;int mi a[0];for (int i 1; i < a.size(); i) {ans max(ans, a[i] - mi);mi min(mi, a[i]);}return ans;} };55. 跳跃游戏 class S…...

vue3如何实现防抖?
第一 防抖就是我们设置一个调用时间,点击后设置时间开始倒计时,如果再次点击会重新倒计时 npm或yarn安装: npm install lodash <template><div click"debouncedInputHandler"><button>打印</button>…...
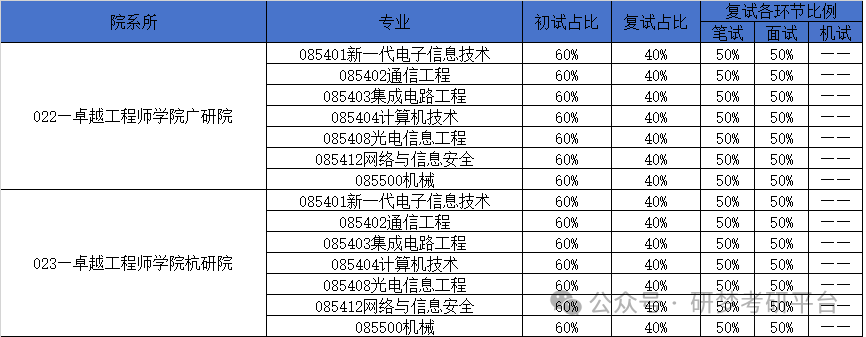
西安电子科技大学初/复试笔试、面试、机试成绩占比
西安电子科技大学初/复试笔试、面试、机试成绩占比 01通信工程学院 02电子工程学院 03计算机科学与技术学院 04机电工程学院 06经济与管理学院 07数学与统计学院 08人文学院 09外国语学院 12生命科学与技术学院 13空间科学与技术学院 14先进材料与纳米科技学院 15网络与信息安…...

spring mvc源码学习笔记之六
pom.xml 内容如下 <?xml version"1.0" encoding"UTF-8"?> <project xmlns"http://maven.apache.org/POM/4.0.0"xmlns:xsi"http://www.w3.org/2001/XMLSchema-instance"xsi:schemaLocation"http://maven.apache.org/P…...

树莓派4b如何连接ov7670摄像头
在树莓派4B上连接和使用OV7670摄像头是一项具有一定技术挑战的任务。这是因为OV7670摄像头是一个原始的CMOS摄像头模块,它通过并行接口与主机通信,而树莓派的GPIO接口通常用于串行接口(如I2C、SPI、UART)通信,不直接支持并行摄像头接口。因此,需要一些额外的硬件和软件工…...
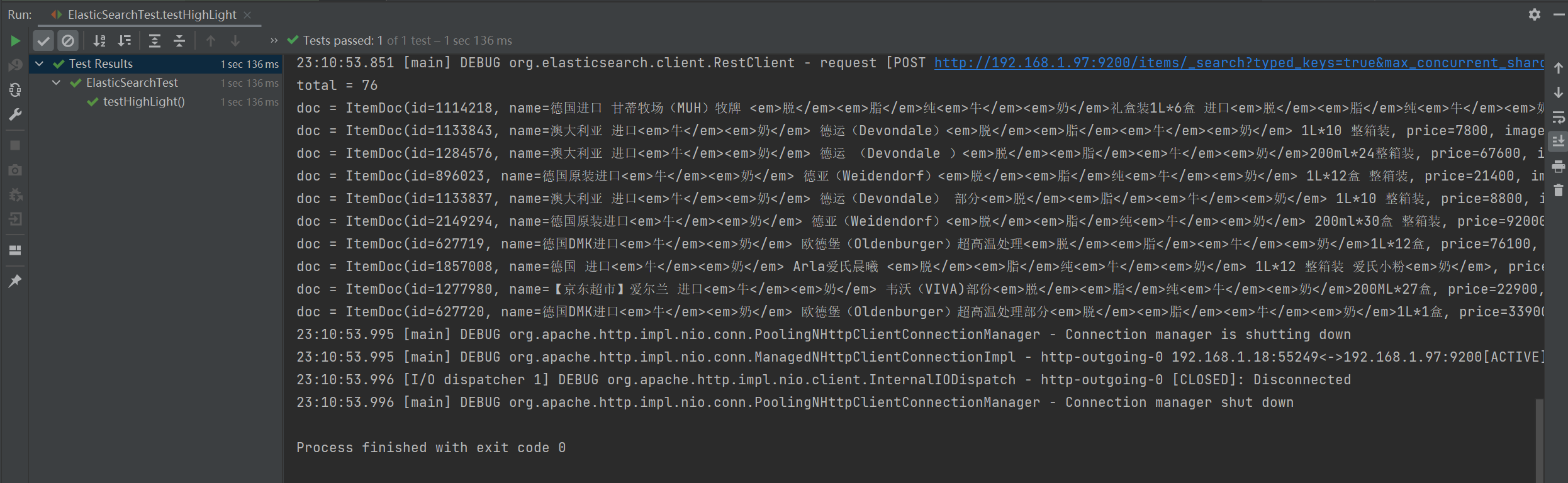
[微服务]分布式搜索Java客户端
快速入门 使用RestClient客户端进行数据搜索可以分为两步 构建并发起请求 代码解读: 第一步,创建SearchRequest对象,指定索引库名第二步,利用request.source()构建DSL,DSL中可以包含查询、分页、排序、高亮等 query…...

如何使用 `uiautomator2` 控制 Android 设备并模拟应用操作_VIVO手机
在 Android 自动化测试中,uiautomator2 是一个非常强大的工具,能够帮助我们通过 Python 控制 Android 设备执行各种操作。今天,我将通过一个简单的示例,介绍如何使用 uiautomator2 控制 Android 设备,执行特定的应用启动、广告跳过以及其他 UI 操作。此示例的目标是自动化…...
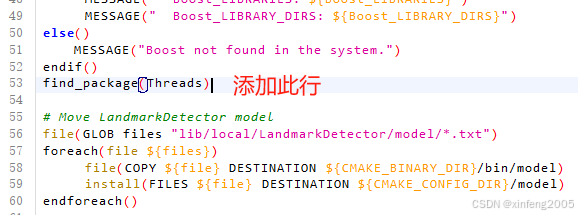
在Ubuntu 18.04.6 LTS安装OpenFace流程
一、修改配置:将gcc8,g8作为默认选项 sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-8 100 sudo update-alternatives --config gcc 选择版本,再查看gcc --version sudo update-alternatives --install /usr/bin/g g /usr/bin/g-…...

C 语言的整型提升问题
目录 引言 一、什么是整型提升 二、为什么会有整型提升 三、整型提升的规则 四、整型提升的影响 五、如何避免整型提升带来的问题 六、总结 引言 在 C 语言中,整型提升(Integer Promotion)是一个常常被忽视但却非常重要的概念。理解整…...

第0章 机器人及自动驾驶SLAM定位方法全解析及入门进阶学习建议
嗨,各位同学大家好!笔者自985硕士毕业后,在机器人算法领域已经深耕 7 年多啦。这段时间里,我积累了不少宝贵经验。本专栏《机器人工程师带你从零入门SLAM》将结合下面的SLAM知识体系思维导图及多年的工作实战总结,将逐…...

2026届学术党必备的AI学术方案推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 当下市场里主流的AI论文写作辅助工具无不各有侧重,在文献检索跟总结方面…...
)
别再被‘不是注册脚本’坑了!手把手教你用记事本创建正确的.reg文件(附微信协议关联案例)
从零构建合规注册表脚本:避开.reg文件导入失败的六大陷阱 每次双击精心准备的.reg文件却看到"不是注册脚本"的红色警告,就像在终点线前被绊倒——这种挫败感我深有体会。三年前第一次尝试为团队部署软件环境时,我连续七次遭遇这个错…...

题解:AcWing 1192 奖金
本文分享的必刷题目是从蓝桥云课、洛谷、AcWing等知名刷题平台精心挑选而来,并结合各平台提供的算法标签和难度等级进行了系统分类。题目涵盖了从基础到进阶的多种算法和数据结构,旨在为不同阶段的编程学习者提供一条清晰、平稳的学习提升路径。 欢迎大家订阅我的专栏:算法…...

如何免费实现网盘全速下载:2025年终极直链下载助手完全指南
如何免费实现网盘全速下载:2025年终极直链下载助手完全指南 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 /…...

SDMatte效果对比展示:普通抠图vs SDMatte+,叶片锯齿消除与羽化自然度
SDMatte效果对比展示:普通抠图vs SDMatte,叶片锯齿消除与羽化自然度 1. 效果展示概览 SDMatte作为一款专业级AI抠图工具,在处理复杂边缘和半透明物体方面展现出显著优势。本文将重点对比标准版SDMatte与增强版SDMatte在处理叶片锯齿和羽化效…...
机械课程设计)
一级-链式提升机(论文+CAD图纸)机械课程设计
在物料垂直输送领域,一级-链式提升机凭借其结构紧凑、运行稳定的特点,成为工业场景中不可或缺的基础设备。其核心作用在于通过链条牵引料斗,实现物料从低处到高处的连续输送,尤其适用于粉状、颗粒状或小块状物料的短距离提升。相比…...
)
虚拟机安装Ubuntu 24.04.x及其常用软件(2026.4)
此次更新把安卓模拟器,烧录工具,无效软件,以及收费软件等不常用软件去除,另外更新了一些下载链接,删除了一些和配置无关的图片。 目录 1 系统安装篇 1.1 安装VMWare Workstation Pro 1.2 下载Ubuntu 24.04.x安装镜…...

彻底告别网盘限速:八大平台直链下载助手完整指南
彻底告别网盘限速:八大平台直链下载助手完整指南 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘 …...

【AGI蛋白质折叠预测革命】:2024年AlphaFold 3与RoseTTAFold AI实测对比,精准度突破99.2%的5大临床应用落地路径
第一章:AGI蛋白质折叠预测能力的范式跃迁 2026奇点智能技术大会(https://ml-summit.org) 传统蛋白质结构预测依赖于多序列比对(MSA)与共进化信号挖掘,计算密集且对低同源性蛋白失效;而新一代AGI驱动的折叠模型已突破…...

不止于找gadget:挖掘ROPgadget在Linux二进制分析中的隐藏用法与实用技巧
超越ROP利用:ROPgadget在Linux二进制分析中的高阶应用指南 在安全研究领域,我们常常陷入工具定位的思维定式——将ROPgadget仅仅视为CTF比赛中的ROP链构造工具。但当你真正深入探索这个工具的代码解析能力时,会发现它实际上是一个被严重低估的…...