Windows重装后NI板卡LabVIEW恢复正常
在重新安装Windows系统后,NI(National Instruments)板卡能够恢复正常工作,通常是由于操作系统的重新配置解决了之前存在的硬件驱动、兼容性或配置问题。操作系统重装后,系统重新加载驱动程序、清理了潜在的冲突或损坏的配置文件,从而使硬件得以正确识别和使用。本文将从多个角度分析为何这种情况发生,并提供具体的处理建议,帮助用户避免和解决类似问题。

可能原因分析
-
驱动程序问题
NI硬件的正常工作依赖于正确的驱动程序。Windows重新安装后,系统可能会重新加载并更新了最新版本的NI驱动程序,这解决了原来驱动版本不匹配或损坏的问题。 -
操作系统的兼容性问题
不同版本的Windows系统和NI硬件/软件可能存在兼容性问题。某些系统更新或错误配置可能导致NI板卡无法识别或正常工作。通过重新安装操作系统,Windows的系统设置被清理并恢复到一个更加“标准”的状态,解决了原有的兼容性问题。 -
注册表或配置文件问题
在长时间使用过程中,操作系统的注册表或配置文件可能会出现错误或损坏,影响硬件设备的识别和驱动加载。重新安装系统时,相关配置被清除并重新建立,恢复了硬件设备的正常工作。 -
硬件资源冲突或配置问题
在硬件工作过程中,系统可能发生硬件资源冲突(如IRQ冲突、DMA通道问题等),使得NI板卡无法正常工作。重新安装Windows系统后,硬件资源被重新分配,避免了潜在的资源冲突。
处理建议
-
检查并更新驱动程序
在安装完操作系统后,确保从NI官网或者使用NI MAX (Measurement & Automation Explorer)工具更新NI硬件的驱动程序。更新驱动程序有助于解决硬件兼容性问题。 -
利用NI MAX进行设备检测
使用NI MAX工具检查NI硬件是否正确连接并识别。通过此工具可以诊断设备的状态并及时发现驱动或硬件问题。 -
避免系统冲突
如果你的计算机上使用了多个设备,确保这些设备之间没有资源冲突。可以通过设备管理器查看硬件资源使用情况,调整配置以避免IRQ、DMA等冲突。 -
备份和还原系统配置
在系统安装后,建议定期备份操作系统及驱动程序配置,以便将来在类似问题发生时快速恢复系统。也可以通过系统还原点来解决系统配置问题。 -
系统日志分析
如果问题仍然存在,可以分析Windows的事件查看器日志,检查是否有硬件相关的错误消息或警告。这可以帮助你发现系统或硬件驱动问题的根源。
通过上述建议,可以有效减少类似问题的发生,并提高系统稳定性。
相关文章:
Windows重装后NI板卡LabVIEW恢复正常
在重新安装Windows系统后,NI(National Instruments)板卡能够恢复正常工作,通常是由于操作系统的重新配置解决了之前存在的硬件驱动、兼容性或配置问题。操作系统重装后,系统重新加载驱动程序、清理了潜在的冲突或损坏的…...

深度解析统计学四大分布:Z、卡方、t 与 F 的关联与应用
统计学关键分布:Z、卡方、t、F 的关系探秘与应用指南 A/B实验系列相关文章(置顶) 1. A/B实验之置信检验(一):如何避免误判和漏报 2. A/B实验之置信检验(二):置信检验精要…...

zkServer.sh脚本
Apache ZooKeeper 几种常见的方法: 一、使用 zkServer.sh 脚本: 最常见的启动 ZooKeeper 的方式是使用提供的 zkServer.sh 脚本。此脚本可用于管理 ZooKeeper 进程。以下是一些示例命令: 1. 在前台启动 ZooKeeper: ./zkServer.s…...

CV(10)--目标检测
前言 仅记录学习过程,有问题欢迎讨论 目标检测 object detection,就是在给定的图片中精确找到物体所在位置,并标注出物体的类别;输出的是分类类别label物体的外框(x, y, width, height)。 目标检测算法:…...
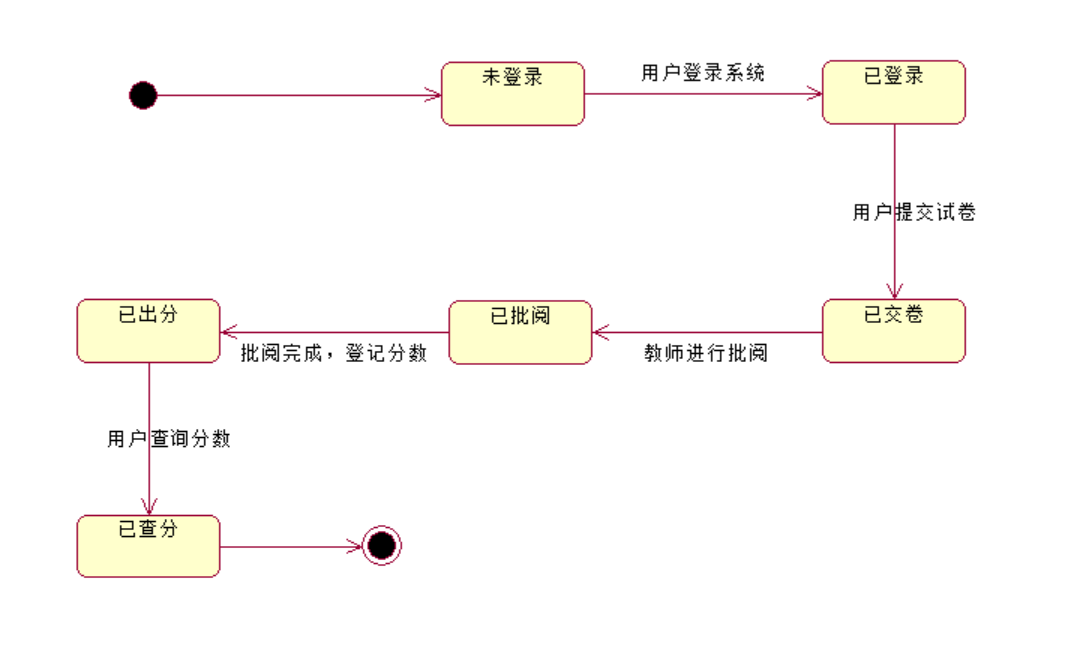
UML系列之Rational Rose笔记七:状态图
一、新建状态图 依旧是新建statechart diagram; 二、工作台介绍 接着就是一个状态的开始:开始黑点依旧可以从左边进行拖动放置: 这就是状态的开始,和活动图泳道图是一样的;只能有一个开始,但是可以有多个…...

C++单例模式的设计
单例模式(Singleton Pattern)是一种设计模式,用于确保一个类只有一个实例,并提供一个全局访问点来访问该实例。在C中,单例模式通常用于管理全局资源或共享状态。 以下是C中实现单例模式的几种常见方式: 懒…...

基于springboot的自习室预订系统
作者:学姐 开发技术:SpringBoot、SSM、Vue、MySQL、JSP、ElementUI、Python、小程序等 文末获取“源码数据库万字文档PPT”,支持远程部署调试、运行安装。 项目包含: 完整源码数据库功能演示视频万字文档PPT 项目编码࿱…...

shell笔记
1.使用 ls -l 及 find 查找某个或者多个目录文件数量时 单个目录: find 目录 -type f|wc -l与 ls -l 目录|grep -v total|wc -l 一致 多个目录:如上结果不一致,因为 ls -l 在算多目录时,会将多目录及空格打出算作额外行 find 更精…...

《鸿蒙Next微内核:解锁人工智能决策树并行计算的加速密码》
在当今人工智能飞速发展的时代,提升运算速度是推动其进步的关键。鸿蒙Next以其独特的微内核特性,为设计决策树的并行计算框架提供了新的思路和契机。 鸿蒙Next微内核特性概述 鸿蒙Next的微内核架构将核心功能模块化,仅保留进程管理、内存管…...

AI刷题-最大矩形面积问题、小M的数组变换
目录 一、最大矩形面积问题 问题描述 输入格式 输出格式 输入样例 输出样例 数据范围 解题思路: 问题理解 数据结构选择 算法步骤 最终代码: 运行结果: 二、小M的数组变换 问题描述 测试样例 解题思路: 问题…...

Redis集群部署详解:主从复制、Sentinel哨兵模式与Cluster集群的工作原理与配置
集群部署形式 1、主从复制1.1 工作机制1.2 配置实现1.3 优缺点1.4 部署形式1.5 主从复制优化 2、Sentinel 哨兵模式2.1 工作机制2.2 配置实现2.3 优缺点2.4 哨兵机制选举流程2.5 脑裂问题解决方案 3、Redis Cluster3.1 工作机制3.2 配置实现3.3 优缺点3.4 故障转移3.5 哈希槽为…...
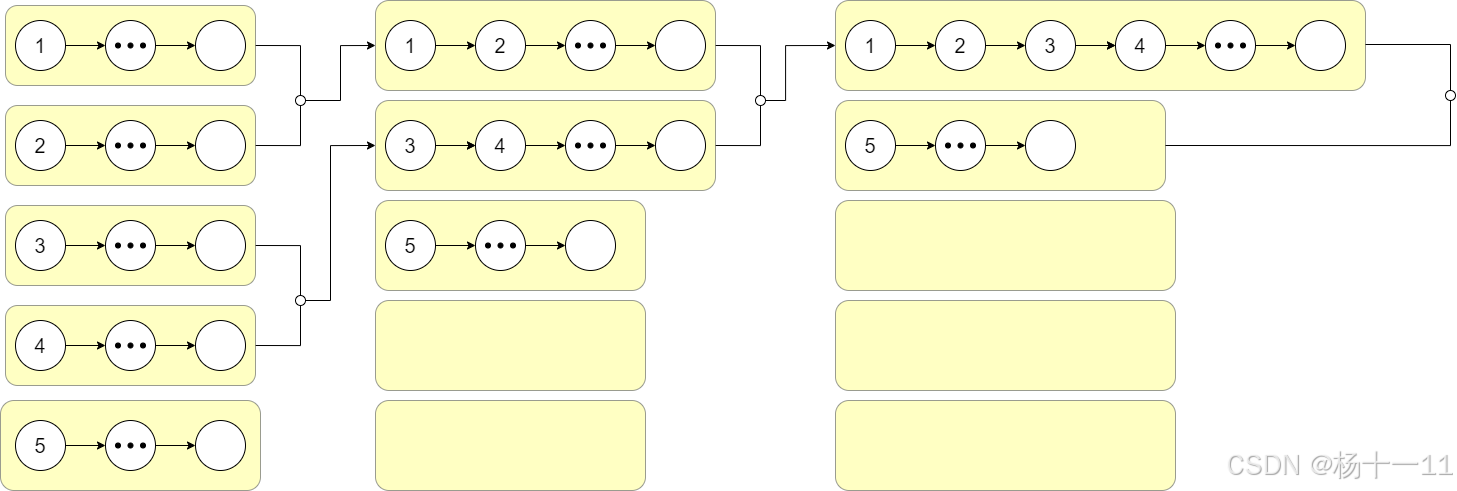
LeetCode热题100(三十四) —— 23.合并K个升序链表
LeetCode热题100(三十四) —— 23.合并K个升序链表 题目描述代码实现思路一:选择排序(199ms)思路二:归并排序(2ms) 思路解析 你好,我是杨十一,一名热爱健身的程序员在Coding的征程中,不断探索与…...

kalilinux - 目录扫描之dirsearch
情景导入 先简单介绍一下dirsearch有啥用。 假如你现在访问一个网站,例如https://www.example.com/ 它是一个电商平台或者其他功能性质的平台。 站在开发者的角度上思考,我们只指导https://www.example.com/ 但不知道它下面有什么文件,文…...

浅谈云计算04 | 云基础设施机制
探秘云基础设施机制:云计算的基石 一、云基础设施 —— 云计算的根基二、核心机制之网络:连接云的桥梁(一)虚拟网络边界ÿ…...

文件上传 分片上传
分片上传则是将一个大文件分割成多个小块分别上传,最后再由服务器合并成完整的文件。这种做法的好处是可以并行处理多个小文件,提高上传效率;同时,如果某一部分上传失败,只需要重传这一部分,不影响其他部分…...

【0391】Postgres内核 checkpointer process ① 启动初始化
相关文章: 【0108】checkpointer运行原理(概念篇)(1) 【0278】checkpointer 共享内存(CheckpointerShmem)初始化(3) 文章目录 1. 启动 checkpointer process1.1 初始化 checkpointer PID1.2 注册 signal1.3 初始化 last checkpoint time2. 确认 config 的 shared memo…...

链路追踪SkyWalking
链路追踪 链路追踪作用链路追踪的关键概念链路追踪的工作原理常用链路追踪工具链路追踪的实现步骤链路追踪的典型场景 SkyWalkingSkyWalking 的主要功能SkyWalking 的架构安装 SkyWalking从 SkyWalking 的官方 GitHub 仓库 下载最新版本。配置后端存储SkyWalking使用࿰…...

Uniapp判断设备是安卓还是 iOS,并调用不同的方法
在 UniApp 中,可以通过 uni.getSystemInfoSync() 方法来获取设备信息,然后根据系统类型判断当前设备是安卓还是 iOS,并调用不同的方法。 示例代码 export default {onLoad() {this.checkPlatform();},methods: {checkPlatform() {// 获取系…...

计算机网络 (42)远程终端协议TELNET
前言 Telnet(Telecommunication Network Protocol)是一种网络协议,属于TCP/IP协议族,主要用于提供远程登录服务。 一、概述 Telnet协议是一种远程终端协议,它允许用户通过终端仿真器连接到远程主机,并在远程…...

rtthread学习笔记系列-- 23 环形缓冲块 ringblock
文章目录 23 环形缓冲块 ringblock23.1 初始化23.2 PUT & GET 块23.3 块释放23.4 rt_rbb_blk_queue_get23.5 rt_rbb_blk_alloc https://github.com/wdfk-prog/RT-Thread-Study 23 环形缓冲块 ringblock 环形块状缓冲区简称为:rbb。与传统的环形缓冲区不同的是&…...

Taotoken平台快速获取APIKey并开始你的第一个Python调用示例
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken平台快速获取APIKey并开始你的第一个Python调用示例 1. 准备工作:注册与登录 要开始使用Taotoken,…...

PCB虚焊/走线断裂/焊盘脱落工程师易漏判
PCB 故障中,30% 并非元件损坏,而是 PCB 本身的隐性故障—— 虚焊、走线断裂、焊盘脱落、过孔开路。这类故障外观隐蔽、时好时坏、排查难度大,很多工程师反复更换元件仍无法解决,最终误判为 “板报废”。一、PCB 隐性故障核心成因…...

Unity发行版DLL调试实战:DnSpy无源码IL级断点指南
1. 这不是“反编译”,而是Unity游戏开发者的日常调试手段你有没有遇到过这样的情况:接手一个Unity发行版游戏,想快速验证某个功能逻辑是否按预期执行,或者排查一个偶发的崩溃,但手头只有打包后的Assembly-CSharp.dll&a…...

配置OpenClaw Agent使用Taotoken作为后端模型提供商
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 配置OpenClaw Agent使用Taotoken作为后端模型提供商 基础教程类,指导希望使用OpenClaw等Agent工具的开发者,…...

长期使用Token Plan套餐在项目开发中的成本观察
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用Token Plan套餐在项目开发中的成本观察 在AI驱动的项目开发中,成本控制与预算管理是团队负责人必须面对的现实…...
)
【C++】零基础入门 · 第 4 节:循环结构(while、for、do-while)
上一节我们学习了条件判断,这一节来学习循环结构。循环让程序能够重复执行某段代码,直到满足特定条件为止。C 提供了三种循环语句:while、for 和 do-while。 1. while 循环:先判断后执行 while 循环在每次执行前先检查条件&#x…...

Linux平台终极Jellyfin客户端:如何用Tsukimi打造专业级媒体中心体验?
Linux平台终极Jellyfin客户端:如何用Tsukimi打造专业级媒体中心体验? 【免费下载链接】tsukimi A simple third-party Jellyfin client for Linux 项目地址: https://gitcode.com/gh_mirrors/ts/tsukimi 你是否厌倦了网页版Jellyfin的笨重体验&am…...

Diablo Edit2:3步掌握暗黑破坏神2存档修改的终极秘籍
Diablo Edit2:3步掌握暗黑破坏神2存档修改的终极秘籍 【免费下载链接】diablo_edit Diablo II Character editor. 项目地址: https://gitcode.com/gh_mirrors/di/diablo_edit 还在为暗黑破坏神2中刷装备的漫长过程感到疲惫吗?Diablo Edit2这款免费…...

UE4SS实战指南:虚幻引擎游戏脚本系统的深度解析与应用
UE4SS实战指南:虚幻引擎游戏脚本系统的深度解析与应用 【免费下载链接】RE-UE4SS Injectable LUA scripting system, SDK generator, live property editor and other dumping utilities for UE4/5 games 项目地址: https://gitcode.com/gh_mirrors/re/RE-UE4SS …...

5分钟掌握文件完整性验证:HashCalculator终极免费批量哈希计算工具指南
5分钟掌握文件完整性验证:HashCalculator终极免费批量哈希计算工具指南 【免费下载链接】HashCalculator 哈希值计算工具,批量计算/批量校验/查找重复文件/改变哈希值等,支持集成到系统右键菜单 项目地址: https://gitcode.com/gh_mirrors/…...