mono3d汇总
lidar坐标系
lidar坐标系可以简单归纳为标准lidar坐标系和nucense lidar坐标系,参考链接。这个坐标系和车辆的ego坐标系是一致的。
- 标准lidar坐标系
opendet3d,mmdetection3d和kitt都i使用了该坐标系
up z^ x front| /| /left y <------ 0
kitti采集平台传感器安装示意图如下,其中红色圆圈标记的为lidar坐标系。

后面说的global yaw就是目标与’-y’的夹角,与’-y’重合时是0, 与x重合为90度。
- nucense lidar坐标系
nucense传感器坐标系示意图如下,可以看出lidar坐标系和和标准lidar坐标系有个90度的旋转关系。

local yaw & global yaw
由于透视投影的关系,目标在相平面上的成像会同时收到目标转动和相对相机位移的双重影响。所以引出了local yaw和global yaw。
网络学习的对象为local yaw(下面的 α z \alpha_z αz, 其中 α z = α x + p i / 2 \alpha_z = \alpha_x + pi/2 αz=αx+pi/2), 推理时根据目标位置+local yaw计算出global yaw。
α x \alpha_x αx在kitti数据集中的定义为:
α∈[−π,π],即从 −180∘ 到 180∘。
α=0:目标物体的方向与相机光轴完全对齐(面向相机)。
α>0:目标物体的朝向偏向相机光轴的 左侧(逆时针方向)。
α<0:目标物体的朝向偏向相机光轴的 右侧(顺时针方向)。
部分公司2d目标标注的local yaw:目标与相机z同向重叠:90度,与右侧方向的相机x轴重叠:0度。
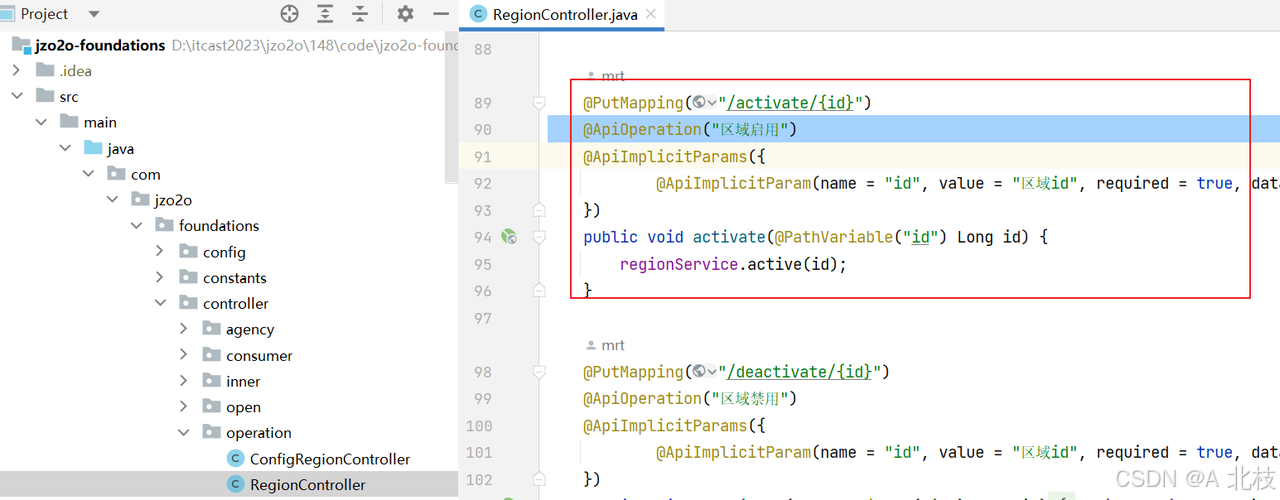
global yaw为[-pi, pi]之间,一般正前方为0,左边为90,右边-90. 参考lidar_box3d.py中的定义:
class LiDARInstance3DBoxes(BaseInstance3DBoxes):"""3D boxes of instances in LIDAR coordinates.Coordinates in LiDAR:.. code-block:: noneup z x front (yaw=0)^ ^| /| /(yaw=0.5*pi) left y <------ 0The relative coordinate of bottom center in a LiDAR box is (0.5, 0.5, 0),and the yaw is around the z axis, thus the rotation axis=2. The yaw is 0 atthe positive direction of x axis, and increases from the positive directionof x to the positive direction of y.Attributes:tensor (Tensor): Float matrix with shape (N, box_dim).box_dim (int): Integer indicating the dimension of a box. Each row is(x, y, z, x_size, y_size, z_size, yaw, ...).with_yaw (bool): If True, the value of yaw will be set to 0 as minmaxboxes."""YAW_AXIS = 2@propertydef corners(self) -> Tensor:"""Convert boxes to corners in clockwise order, in the form of (x0y0z0,x0y0z1, x0y1z1, x0y1z0, x1y0z0, x1y0z1, x1y1z1, x1y1z0)... code-block:: noneup zfront x ^/ |/ |(x1, y0, z1) + ----------- + (x1, y1, z1)/| / |/ | / |(x0, y0, z1) + ----------- + + (x1, y1, z0)| / . | /| / origin | /left y <------- + ----------- + (x0, y1, z0)(x0, y0, z0)Returns:Tensor: A tensor with 8 corners of each box in shape (N, 8, 3)."""if self.tensor.numel() == 0:return torch.empty([0, 8, 3], device=self.tensor.device)dims = self.dimscorners_norm = torch.from_numpy(np.stack(np.unravel_index(np.arange(8), [2] * 3), axis=1)).to(device=dims.device, dtype=dims.dtype)corners_norm = corners_norm[[0, 1, 3, 2, 4, 5, 7, 6]]# use relative origin (0.5, 0.5, 0)corners_norm = corners_norm - dims.new_tensor([0.5, 0.5, 0])corners = dims.view([-1, 1, 3]) * corners_norm.reshape([1, 8, 3])# rotate around z axiscorners = rotation_3d_in_axis(corners, self.tensor[:, 6], axis=self.YAW_AXIS)corners += self.tensor[:, :3].view(-1, 1, 3)return corners
mmdetection3d box_3d_mode.py中定义的各种坐标系:
class Box3DMode(IntEnum):"""Enum of different ways to represent a box.Coordinates in LiDAR:.. code-block:: noneup z^ x front| /| /left y <------ 0The relative coordinate of bottom center in a LiDAR box is (0.5, 0.5, 0),and the yaw is around the z axis, thus the rotation axis=2.Coordinates in Camera:.. code-block:: nonez front//0 ------> x right||vdown yThe relative coordinate of bottom center in a CAM box is (0.5, 1.0, 0.5),and the yaw is around the y axis, thus the rotation axis=1.Coordinates in Depth:.. code-block:: noneup z^ y front| /| /0 ------> x rightThe relative coordinate of bottom center in a DEPTH box is (0.5, 0.5, 0),and the yaw is around the z axis, thus the rotation axis=2."""
SMOKE: Single-Stage Monocular 3D Object Detection via Keypoint Estimation 对local yaw给出了示意图:


- globa2local转换
参考fcos3d代码:
def _get_target_single(..):
#...# change orientation to local yawgt_bboxes_3d[..., 6] = -torch.atan2(gt_bboxes_3d[..., 0], gt_bboxes_3d[..., 2]) + gt_bboxes_3d[..., 6]
相关文章:
mono3d汇总
lidar坐标系 lidar坐标系可以简单归纳为标准lidar坐标系和nucense lidar坐标系,参考链接。这个坐标系和车辆的ego坐标系是一致的。 标准lidar坐标系 opendet3d,mmdetection3d和kitt都i使用了该坐标系 up z^ x front| /| /left y <------ 0kitti采…...

K8S 节点选择器
今天我们来实验 pod 调度的 nodeName 与 nodeSelector。官网描述如下: 假设有如下三个节点的 K8S 集群: k8s31master 是控制节点 k8s31node1、k8s31node2 是工作节点 容器运行时是 containerd 一、镜像准备 1.1、镜像拉取 docker pull tomcat:8.5-jre8…...

【2024年华为OD机试】 (C卷,200分)- 反射计数(Java JS PythonC/C++)
一、问题描述 题目解析 题目描述 给定一个包含 0 和 1 的二维矩阵,一个物体从给定的初始位置出发,在给定的速度下进行移动。遇到矩阵的边缘时会发生镜面反射。无论物体经过 0 还是 1,都不影响其速度。请计算并给出经过 t 时间单位后&#…...

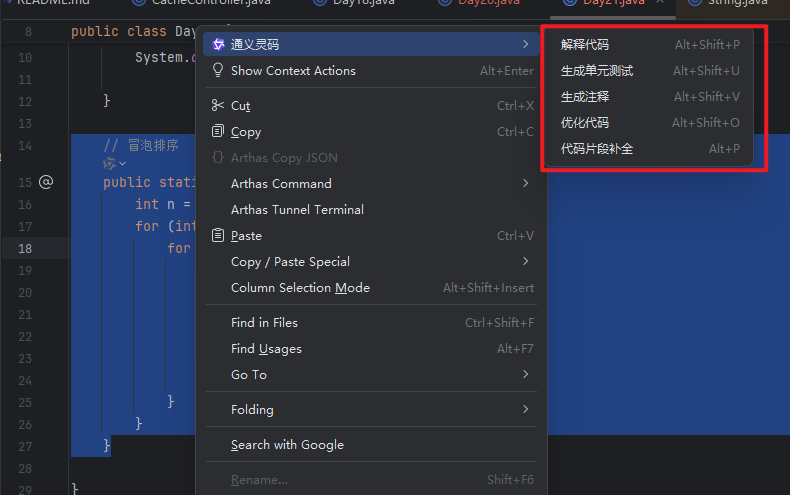
AI编程工具使用技巧——通义灵码
活动介绍通义灵码1. 理解通义灵码的基本概念示例代码生成 2. 使用明确的描述示例代码生成 3. 巧妙使用注释示例代码生成 4. 注意迭代与反馈原始代码反馈后生成优化代码 5. 结合生成的代码进行调试示例测试代码 其他功能定期优化生成的代码合作与分享结合其他工具 总结 活动介绍…...

挖掘机检测数据集,准确识别率91.0%,4327张原始图片,支持YOLO,COCO JSON,PASICAL VOC XML等多种格式标注
挖掘机检测数据集,准确识别率91.0%,4327张图片,支持YOLO,COCO JSON,PASICAL VOC XML等多种格式标注 数据集详情 数据集分割 训练组70% 3022图片 有效集20% 870图片 测试集10&…...

使用Docker部署postgresql
使用Docker部署postgresql postgresql数据库在Docker中的镜像的名称为postgres,可以从DockerHub中pull下来,如果pull不下来那么很大概率是网络问题导致的,这时候你可能需要在网上找一些能用的镜像源,以成功拉取postgres镜像。 有…...
LabVIEW时域近场天线测试
随着通信技术的飞速发展,特别是在5G及未来通信技术中,天线性能的测试需求日益增加。对于短脉冲天线和宽带天线的时域特性测试,传统的频域测试方法已无法满足其需求。时域测试方法在这些应用中具有明显优势,可以提供更快速和精准的…...

LabVIEW桥接传感器数据采集与校准程序
该程序设计用于采集来自桥接传感器的数据,执行必要的设置(如桥接配置、信号采集参数、时间与触发设置),并进行适当的标定和偏移校正,最终通过图表呈现采集到的数据信息。程序包括多个模块,用于配置通道、触…...
菜品管理(day03)
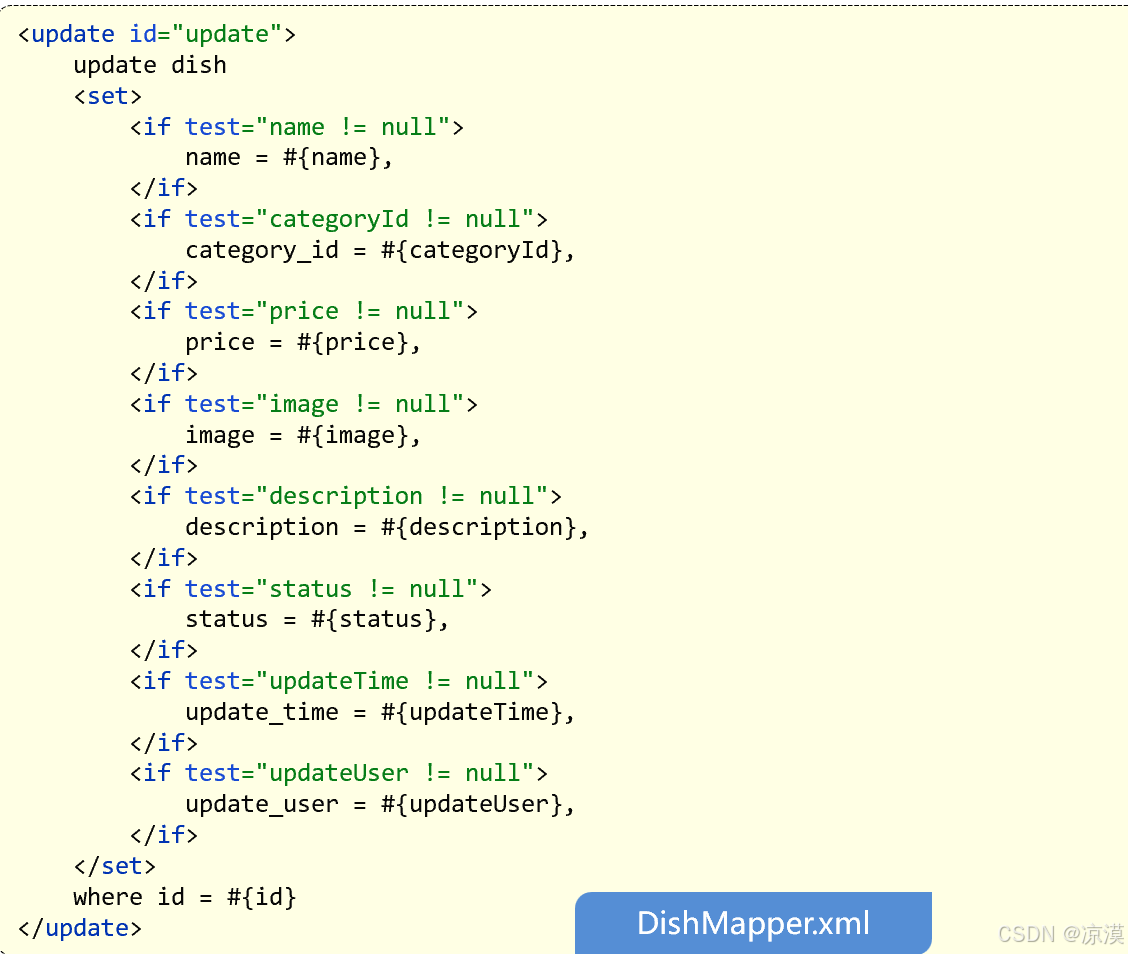
公共字段自动填充 问题分析 业务表中的公共字段: 而针对于这些字段,我们的赋值方式为: 在新增数据时, 将createTime、updateTime 设置为当前时间, createUser、updateUser设置为当前登录用户ID。 在更新数据时, 将updateTime 设置为当前时间…...

深入理解 Android 混淆规则
在 Android 开发中,混淆(Obfuscation)是一种保护代码安全的重要手段,通常通过 ProGuard 或 R8 工具来实现。本文将详细介绍 Android 混淆规则的基本原理、配置方法以及最佳实践,帮助开发者更好地保护应用代码。 博主博…...

《Keras 3 在 TPU 上的肺炎分类》
Keras 3 在 TPU 上的肺炎分类 作者:Amy MiHyun Jang创建日期:2020/07/28最后修改时间:2024/02/12描述:TPU 上的医学图像分类。 (i) 此示例使用 Keras 3 在 Colab 中查看 GitHub 源 简介 设置 本教程将介…...
从 Android 进行永久删除照片恢复的 5 种方法
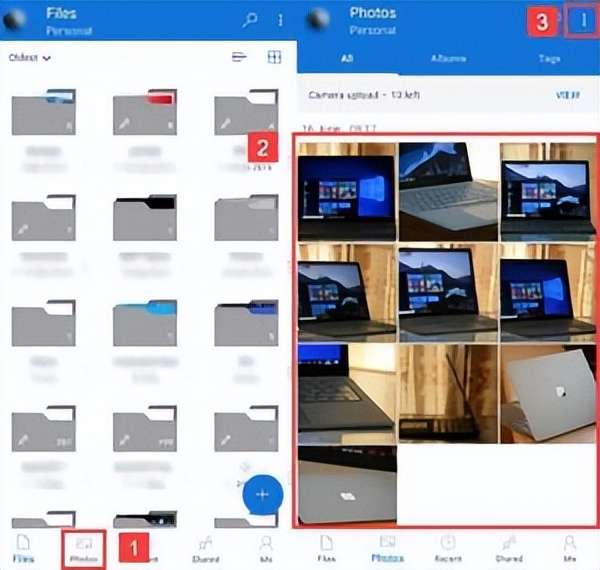
从 Android 设备中丢失珍贵的照片可能是一种毁灭性的经历。无论是由于意外删除、软件故障还是系统更新,如何从 Android 永久恢复已删除的照片是一个普遍的问题。 幸运的是,有一些解决方案可以帮助找回丢失的记忆。本指南将涵盖您需要了解的有关如何检索…...

SDL2:Android APP编译使用
SDL2:Android APP编译使用 3. SDL2:Android APP编译使用3.1 Android Studio环境准备:3.2 构建Android APP(1)方式一:快速构建APK工程(2)方式二:自定义APK工程(…...
linux systemd 服务连续启动失败,不会再重启分析
1. 问题现象 在Linux 系统中,将自已写的可执行文件放到 systemd 服务中做成service 服务,以支持开机自启和失败重启。但是发现服务在重启多次失败后再也起不来,服务状态是 failed,并且报 start request repeated too quickly. 2.…...
【云岚到家】-day03-门户缓存方案选择
【云岚到家】-day03-门户缓存方案选择 1.门户常用的技术方案 什么是门户 说到门户马上会想到门户网站,中国比较早的门户网站有新浪、网易、搜狐、腾讯等,门户网站为用户提供一个集中的、易于访问的平台,使他们能够方便地获取各种信息和服务…...
在IDEA中使用通义灵码插件:全面提升开发效率的智能助手
在IDEA中使用通义灵码插件:全面提升开发效率的智能助手 随着软件开发行业对效率和质量要求的不断提高,开发者们一直在寻找能够简化工作流程、提升代码质量的工具。阿里云推出的通义灵码插件正是这样一个旨在帮助开发者更高效地编写高质量代码的强大工具…...

【正则表达式】从0开始学习正则表达式
正则表达式(英语:Regular Expression,在代码中常简写为regex、regexp或RE) 一、推荐学习网站 正则表达式 – 语法 | 菜鸟教程 正则表达式30分钟入门教程 | 菜鸟教程 编程胶囊-打造学习编程的最好系统 二、必知必记 2.1 元字符…...
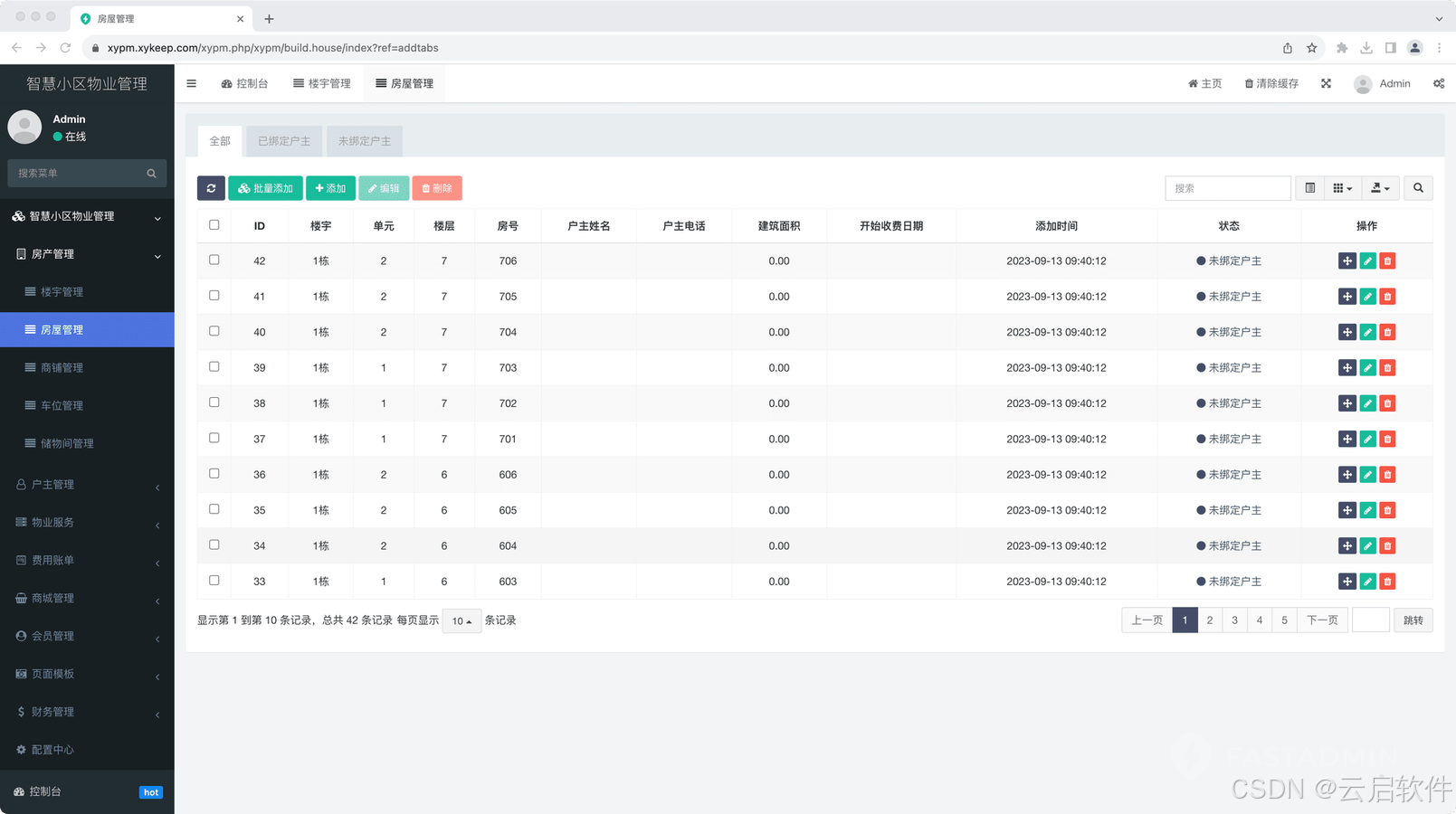
PHP智慧小区物业管理小程序
🌟智慧小区物业管理小程序:重塑社区生活,开启便捷高效新篇章 🌟 智慧小区物业管理小程序是一款基于PHPUniApp精心雕琢的智慧小区物业管理小程序,它犹如一股清新的科技之风,吹进了现代智慧小区的每一个角落…...
)
Linux安装Docker教程(详解)
如果想要系统学习docker,建议进入官方文档中学习:docker官方文档 一. 基本概念 Docker Desktop 和 Docker Engine 有什么区别? Docker Desktop for Linux 提供用户友好的图形界面,可简化容器和服务的管理。它包括 Docker Engine,…...
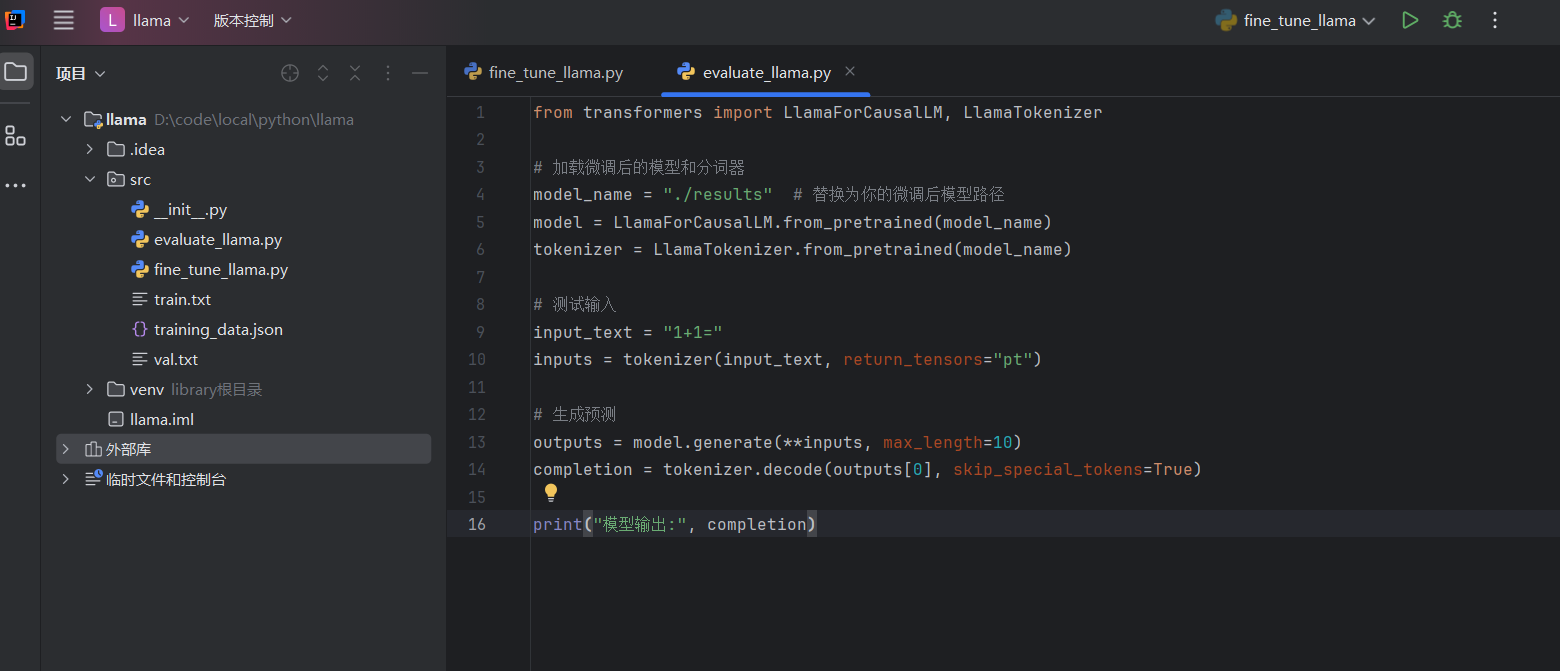
开源AI微调指南:入门级简单训练,初探AI之路
112,如何让 113? 简单的微调你的 AI, 微调前的效果,怎么调教它都是 112. 要对其进行微调(比如训练113),可以按以下步骤进行。 确保你已经安装了以下工具和库: ollamallama3.2Pyt…...

告别拍脑袋规划!用ArcGIS做绿道选线:如何科学量化坡度、水域、道路成本并加权计算
科学规划绿道的ArcGIS高阶技法:从成本栅格构建到最优路径生成绿道规划从来不是简单的"两点之间直线最短",而是需要综合考虑地形、生态、人文等多维因素的复杂决策过程。传统规划中常见的"拍脑袋"决策方式,往往导致建成后…...

基于ATmega2560与ISD1700的智能语音时钟:硬件选型、软件架构与避坑指南
1. 项目概述与核心价值去年折腾那个用ATMega328驱动三块显示屏的时钟时,我主要精力都花在了如何在320x240的TFT屏幕上把时间、日期和图标画得又准又好看上。项目在《Elektor》杂志上发表后,一位热心的读者给我提了个新想法:能不能做个会“说话…...

告别CAJ格式困扰:3分钟学会用开源工具将知网文献转为PDF
告别CAJ格式困扰:3分钟学会用开源工具将知网文献转为PDF 【免费下载链接】caj2pdf Convert CAJ (China Academic Journals) files to PDF. 转换中国知网 CAJ 格式文献为 PDF。佛系转换,成功与否,皆是玄学。 项目地址: https://gitcode.com/…...

InVideo插件深度解析:如何在Unreal Engine中实现高效视频流播放与录制
InVideo插件深度解析:如何在Unreal Engine中实现高效视频流播放与录制 【免费下载链接】InVideo 基于UE4实现的rtsp的视频播放插件 项目地址: https://gitcode.com/gh_mirrors/in/InVideo InVideo是一个基于Unreal Engine 5开发的RTSP视频播放插件࿰…...
)
Claude端到端测试设计终极清单:覆盖17类非功能需求(含延迟敏感度分级、幻觉熔断阈值、多轮对话状态持久化验证)
更多请点击: https://kaifayun.com 第一章:Claude端到端测试设计的演进逻辑与核心范式 Claude端到端测试并非静态产物,而是随模型能力边界拓展、交互场景复杂化及可靠性要求升级而持续演化的工程实践。其演进逻辑根植于三个关键张力…...

BetterJoy终极指南:3分钟让你的Switch手柄变身PC游戏神器
BetterJoy终极指南:3分钟让你的Switch手柄变身PC游戏神器 【免费下载链接】BetterJoy Allows the Nintendo Switch Pro Controller, Joycons and SNES controller to be used with CEMU, Citra, Dolphin, Yuzu and as generic XInput 项目地址: https://gitcode.c…...

从NLP到RAG:AI标书生成系统的技术架构与落地路径深度剖析
引言2026年2月,国家发改委等八部门联合印发《关于加快招标投标领域人工智能推广应用的实施意见》,明确到2026年底招标文件检测、智能辅助评标、围串标识别等重点场景在部分省市实现全覆盖。同一时期,《招标投标法》修订草案经国务院常务会议原…...

Arduino ADC自检:用RC电路诊断模数转换器故障
1. 项目概述:当你的体重秤开始“说谎”你有没有遇到过这样的情况:站上家里的电子体重秤,屏幕上跳出来的数字让你瞬间怀疑人生?要么是轻得离谱,要么是重得吓人,更诡异的是,它可能只在两个固定的、…...

3步快速上手Whisper-WebUI:轻松实现语音转字幕的完整指南
3步快速上手Whisper-WebUI:轻松实现语音转字幕的完整指南 【免费下载链接】Whisper-WebUI A Web UI for easy subtitle using whisper model. 项目地址: https://gitcode.com/gh_mirrors/wh/Whisper-WebUI 还在为视频制作繁琐的字幕而烦恼吗?Whis…...

AI算法工程师如何进行数据预处理?这5个步骤让你的数据更优质
在AI模型开发与测试的全流程中,数据质量直接决定了最终模型的效果上限——哪怕是最先进的大语言模型,用劣质数据训练出来也只能输出劣质结果。对于软件测试从业者来说,不管是参与AI模型的功能测试、性能测试,还是负责测试数据集的…...