ORB-SLAM2源码学习:Initializer.cc⑧: Initializer::CheckRT检验三角化结果
前言
ORB-SLAM2源码学习:Initializer.cc⑦: Initializer::Triangulate特征点对的三角化_cv::svd::compute-CSDN博客
经过上面的三角化我们成功得到了三维点,但是经过三角化成功的三维点并不一定是有效的,需要筛选才能作为初始化地图点。
1.函数声明
int Initializer::CheckRT(const cv::Mat &R, const cv::Mat &t, const vector<cv::KeyPoint> &vKeys1, const vector<cv::KeyPoint> &vKeys2,const vector<Match> &vMatches12, vector<bool> &vbMatchesInliers,const cv::Mat &K, vector<cv::Point3f> &vP3D, float th2, vector<bool> &vbGood, float ¶llax)2.函数定义
我们把相机1的光轴中心作为世界坐标系的原点,从相机1到相机2的位姿:

则从相机2到相机1的位姿:

对应关系:


则相机2的光轴中心O2在相机1的坐标系下的坐标为:
计算相机2 的光轴中心O2 在相机1 坐标系下的坐标是为了求解三维点分别在两个坐标系下和光轴中心的夹角。如果我们要求向量夹角,那么前提是这些向量都在同一个坐标系下。我们看相机1坐标系,此时O1是相机1 的光轴中心,也是相机1 坐标系原点, P3d 是相机1坐标系(世界坐标系)下的三维点,这就必须得到O2在相机1 坐标系下的坐标,也就是我们前面推导的过程。
计算夹角是为了判断三维点的有效性, 因为初始化地图点( 三角化得到的三维点)特别重要,后续跟踪都是以此为基础的,所以在确定三维点时要非常小心。确定一个合格的三维点需要通过以下条件:
1.三维点的3 个坐标都必须是有限的实数。
2.三维点深度值必须为正。
3.三维点和两帧图像光轴中心夹角需要满足一定的条件。夹角越大,视差越大, 三角化结果越准确。
4. 三维点的重投影误差小于设定的阈值。
经过上面条件的筛选,最后剩下的三维点才是合格的三维点。我们会记录当前位姿对应的合格三维点数目和视差。
具体的流程
1.计算前的参数准备与声明
// 对给出的特征点对及其R t , 通过三角化检查解的有效性,也称为 cheirality check// Calibration parameters//从相机内参数矩阵获取相机的校正参数const float fx = K.at<float>(0,0);const float fy = K.at<float>(1,1);const float cx = K.at<float>(0,2);const float cy = K.at<float>(1,2);//特征点是否是good点的标记,这里的特征点指的是参考帧中的特征点vbGood = vector<bool>(vKeys1.size(),false);//重设存储空间坐标的点的大小vP3D.resize(vKeys1.size());//存储计算出来的每对特征点的视差vector<float> vCosParallax;vCosParallax.reserve(vKeys1.size());
2.构建投影矩阵计算相机光心2在世界坐标系下的坐标
这里与前边推导的过程一致。
// Camera 1 Projection Matrix K[I|0]// Step 1:计算相机的投影矩阵 // 投影矩阵P是一个 3x4 的矩阵,可以将空间中的一个点投影到平面上,获得其平面坐标,这里均指的是齐次坐标。// 对于第一个相机是 P1=K*[I|0]// 以第一个相机的光心作为世界坐标系, 定义相机的投影矩阵cv::Mat P1(3,4, //矩阵的大小是3x4CV_32F, //数据类型是浮点数cv::Scalar(0)); //初始的数值是0//将整个K矩阵拷贝到P1矩阵的左侧3x3矩阵,因为 K*I = KK.copyTo(P1.rowRange(0,3).colRange(0,3));// 第一个相机的光心设置为世界坐标系下的原点cv::Mat O1 = cv::Mat::zeros(3,1,CV_32F);// Camera 2 Projection Matrix K[R|t]// 计算第二个相机的投影矩阵 P2=K*[R|t]cv::Mat P2(3,4,CV_32F);R.copyTo(P2.rowRange(0,3).colRange(0,3));t.copyTo(P2.rowRange(0,3).col(3));//最终结果是K*[R|t]P2 = K*P2;// 第二个相机的光心在世界坐标系下的坐标cv::Mat O2 = -R.t()*t;3.开始遍历所有的特征点对
//在遍历开始前,先将good点计数设置为0int nGood=0;// 开始遍历所有的特征点对for(size_t i=0, iend=vMatches12.size();i<iend;i++){// 跳过outliersif(!vbMatchesInliers[i])continue;....} 3.1调用Triangulate函数进行三角化
// Step 2 获取特征点对,调用Triangulate() 函数进行三角化,得到三角化测量之后的3D点坐标// kp1和kp2是匹配好的有效特征点const cv::KeyPoint &kp1 = vKeys1[vMatches12[i].first];const cv::KeyPoint &kp2 = vKeys2[vMatches12[i].second];//存储三维点的的坐标cv::Mat p3dC1;// 利用三角法恢复三维点p3dC1Triangulate(kp1,kp2, //特征点P1,P2, //投影矩阵p3dC1); //输出,三角化测量之后特征点的空间坐标 3.2合格的三维点的条件1的判断
// Step 3 第一关:检查三角化的三维点坐标是否合法(非无穷值)// 只要三角测量的结果中有一个是无穷大的就说明三角化失败,跳过对当前点的处理,进行下一对特征点的遍历 if(!isfinite(p3dC1.at<float>(0)) || !isfinite(p3dC1.at<float>(1)) || !isfinite(p3dC1.at<float>(2))){//其实这里就算是不这样写也没问题,因为默认的匹配点对就不是good点vbGood[vMatches12[i].first]=false;//继续对下一对匹配点的处理continue;}3.3合格的三维点的条件2和3的判断
// Check parallax// Step 4 第二关:通过三维点深度值正负、两相机光心视差角大小来检查是否合法 //得到向量PO1cv::Mat normal1 = p3dC1 - O1;//求取模长,其实就是距离float dist1 = cv::norm(normal1);//同理构造向量PO2cv::Mat normal2 = p3dC1 - O2;//求模长float dist2 = cv::norm(normal2);//根据公式:a.*b=|a||b|cos_theta 可以推导出来下面的式子float cosParallax = normal1.dot(normal2)/(dist1*dist2);// Check depth in front of first camera (only if enough parallax, as "infinite" points can easily go to negative depth)// 如果深度值为负值,为非法三维点跳过该匹配点对// ?视差比较小时,重投影误差比较大。这里0.99998 对应的角度为0.36°,这里不应该是 cosParallax>0.99998 吗?// ?因为后面判断vbGood 点时的条件也是 cosParallax<0.99998 // !可能导致初始化不稳定if(p3dC1.at<float>(2)<=0 && cosParallax<0.99998)continue;// Check depth in front of second camera (only if enough parallax, as "infinite" points can easily go to negative depth)// 讲空间点p3dC1变换到第2个相机坐标系下变为p3dC2cv::Mat p3dC2 = R*p3dC1+t; //判断过程和上面的相同if(p3dC2.at<float>(2)<=0 && cosParallax<0.99998)continue;3.4计算重投影误差
// Step 5 第三关:计算空间点在参考帧和当前帧上的重投影误差,如果大于阈值则舍弃// Check reprojection error in first image// 计算3D点在第一个图像上的投影误差//投影到参考帧图像上的点的坐标x,yfloat im1x, im1y;//这个使能空间点的z坐标的倒数float invZ1 = 1.0/p3dC1.at<float>(2);//投影到参考帧图像上。因为参考帧下的相机坐标系和世界坐标系重合,因此这里就直接进行投影就可以了im1x = fx*p3dC1.at<float>(0)*invZ1+cx;im1y = fy*p3dC1.at<float>(1)*invZ1+cy;//参考帧上的重投影误差,这个的确就是按照定义来的float squareError1 = (im1x-kp1.pt.x)*(im1x-kp1.pt.x)+(im1y-kp1.pt.y)*(im1y-kp1.pt.y);// 重投影误差太大,跳过淘汰if(squareError1>th2)continue;// Check reprojection error in second image// 计算3D点在第二个图像上的投影误差,计算过程和第一个图像类似float im2x, im2y;// 注意这里的p3dC2已经是第二个相机坐标系下的三维点了float invZ2 = 1.0/p3dC2.at<float>(2);im2x = fx*p3dC2.at<float>(0)*invZ2+cx;im2y = fy*p3dC2.at<float>(1)*invZ2+cy;// 计算重投影误差float squareError2 = (im2x-kp2.pt.x)*(im2x-kp2.pt.x)+(im2y-kp2.pt.y)*(im2y-kp2.pt.y);// 重投影误差太大,跳过淘汰if(squareError2>th2)continue;3.5统计经过检验的三维点信息
// Step 6 统计经过检验的3D点个数,记录3D点视差角 // 如果运行到这里就说明当前遍历的这个特征点对靠谱,经过了重重检验,说明是一个合格的点,称之为good点 vCosParallax.push_back(cosParallax);//存储这个三角化测量后的3D点在世界坐标系下的坐标vP3D[vMatches12[i].first] = cv::Point3f(p3dC1.at<float>(0),p3dC1.at<float>(1),p3dC1.at<float>(2));//good点计数++nGood++;//判断视差角,只有视差角稍稍大一丢丢的才会给打good点标记//? bug 我觉得这个写的位置不太对。你的good点计数都++了然后才判断,不是会让good点标志和good点计数不一样吗if(cosParallax<0.99998)vbGood[vMatches12[i].first]=true;4.得到最小的视差角
如果满足要求的三维点数大于50就获取其中最小的视差角如果不满足数量要求就将视差角设置为0。
// Step 7 得到3D点中较小的视差角,并且转换成为角度制表示if(nGood>0){// 从小到大排序,注意vCosParallax值越大,视差越小sort(vCosParallax.begin(),vCosParallax.end());// !排序后并没有取最小的视差角,而是取一个较小的视差角// 作者的做法:如果经过检验过后的有效3D点小于50个,那么就取最后那个最小的视差角(cos值最大)// 如果大于50个,就取排名第50个的较小的视差角即可,为了避免3D点太多时出现太小的视差角 size_t idx = min(50,int(vCosParallax.size()-1));//将这个选中的角弧度制转换为角度制parallax = acos(vCosParallax[idx])*180/CV_PI;}else//如果没有good点那么这个就直接设置为0了parallax=0;//返回good点计数return nGood;完整的代码分析
/*用位姿来对特征匹配点三角化,从中筛选中合格的三维点R 旋转矩阵Rt 平移矩阵tvKeys1 参考帧特征点vKeys2 当前帧特征点vMatches12 两帧特征点的匹配关系vbMatchesInliers 特征点对内点标记K 相机内参矩阵vP3D 三角化测量之后的特征点的空间坐标th2 重投影误差的阈值vbGood 标记成功三角化点?parallax 计算出来的比较大的视差角(注意不是最大,具体看后面代码)return int*/
int Initializer::CheckRT(const cv::Mat &R, const cv::Mat &t, const vector<cv::KeyPoint> &vKeys1, const vector<cv::KeyPoint> &vKeys2,const vector<Match> &vMatches12, vector<bool> &vbMatchesInliers,const cv::Mat &K, vector<cv::Point3f> &vP3D, float th2, vector<bool> &vbGood, float ¶llax)
{ // 对给出的特征点对及其R t , 通过三角化检查解的有效性,也称为 cheirality check// Calibration parameters//从相机内参数矩阵获取相机的校正参数const float fx = K.at<float>(0,0);const float fy = K.at<float>(1,1);const float cx = K.at<float>(0,2);const float cy = K.at<float>(1,2);//特征点是否是good点的标记,这里的特征点指的是参考帧中的特征点vbGood = vector<bool>(vKeys1.size(),false);//重设存储空间坐标的点的大小vP3D.resize(vKeys1.size());//存储计算出来的每对特征点的视差vector<float> vCosParallax;vCosParallax.reserve(vKeys1.size());// Camera 1 Projection Matrix K[I|0]// Step 1:计算相机的投影矩阵 // 投影矩阵P是一个 3x4 的矩阵,可以将空间中的一个点投影到平面上,获得其平面坐标,这里均指的是齐次坐标。// 对于第一个相机是 P1=K*[I|0]// 以第一个相机的光心作为世界坐标系, 定义相机的投影矩阵cv::Mat P1(3,4, //矩阵的大小是3x4CV_32F, //数据类型是浮点数cv::Scalar(0)); //初始的数值是0//将整个K矩阵拷贝到P1矩阵的左侧3x3矩阵,因为 K*I = KK.copyTo(P1.rowRange(0,3).colRange(0,3));// 第一个相机的光心设置为世界坐标系下的原点cv::Mat O1 = cv::Mat::zeros(3,1,CV_32F);// Camera 2 Projection Matrix K[R|t]// 计算第二个相机的投影矩阵 P2=K*[R|t]cv::Mat P2(3,4,CV_32F);R.copyTo(P2.rowRange(0,3).colRange(0,3));t.copyTo(P2.rowRange(0,3).col(3));//最终结果是K*[R|t]P2 = K*P2;// 第二个相机的光心在世界坐标系下的坐标cv::Mat O2 = -R.t()*t;//在遍历开始前,先将good点计数设置为0int nGood=0;// 开始遍历所有的特征点对for(size_t i=0, iend=vMatches12.size();i<iend;i++){// 跳过outliersif(!vbMatchesInliers[i])continue;// Step 2 获取特征点对,调用Triangulate() 函数进行三角化,得到三角化测量之后的3D点坐标// kp1和kp2是匹配好的有效特征点const cv::KeyPoint &kp1 = vKeys1[vMatches12[i].first];const cv::KeyPoint &kp2 = vKeys2[vMatches12[i].second];//存储三维点的的坐标cv::Mat p3dC1;// 利用三角法恢复三维点p3dC1Triangulate(kp1,kp2, //特征点P1,P2, //投影矩阵p3dC1); //输出,三角化测量之后特征点的空间坐标 // Step 3 第一关:检查三角化的三维点坐标是否合法(非无穷值)// 只要三角测量的结果中有一个是无穷大的就说明三角化失败,跳过对当前点的处理,进行下一对特征点的遍历 if(!isfinite(p3dC1.at<float>(0)) || !isfinite(p3dC1.at<float>(1)) || !isfinite(p3dC1.at<float>(2))){//其实这里就算是不这样写也没问题,因为默认的匹配点对就不是good点vbGood[vMatches12[i].first]=false;//继续对下一对匹配点的处理continue;}// Check parallax// Step 4 第二关:通过三维点深度值正负、两相机光心视差角大小来检查是否合法 //得到向量PO1cv::Mat normal1 = p3dC1 - O1;//求取模长,其实就是距离float dist1 = cv::norm(normal1);//同理构造向量PO2cv::Mat normal2 = p3dC1 - O2;//求模长float dist2 = cv::norm(normal2);//根据公式:a.*b=|a||b|cos_theta 可以推导出来下面的式子float cosParallax = normal1.dot(normal2)/(dist1*dist2);// Check depth in front of first camera (only if enough parallax, as "infinite" points can easily go to negative depth)// 如果深度值为负值,为非法三维点跳过该匹配点对// ?视差比较小时,重投影误差比较大。这里0.99998 对应的角度为0.36°,这里不应该是 cosParallax>0.99998 吗?// ?因为后面判断vbGood 点时的条件也是 cosParallax<0.99998 // !可能导致初始化不稳定if(p3dC1.at<float>(2)<=0 && cosParallax<0.99998)continue;// Check depth in front of second camera (only if enough parallax, as "infinite" points can easily go to negative depth)// 讲空间点p3dC1变换到第2个相机坐标系下变为p3dC2cv::Mat p3dC2 = R*p3dC1+t; //判断过程和上面的相同if(p3dC2.at<float>(2)<=0 && cosParallax<0.99998)continue;// Step 5 第三关:计算空间点在参考帧和当前帧上的重投影误差,如果大于阈值则舍弃// Check reprojection error in first image// 计算3D点在第一个图像上的投影误差//投影到参考帧图像上的点的坐标x,yfloat im1x, im1y;//这个使能空间点的z坐标的倒数float invZ1 = 1.0/p3dC1.at<float>(2);//投影到参考帧图像上。因为参考帧下的相机坐标系和世界坐标系重合,因此这里就直接进行投影就可以了im1x = fx*p3dC1.at<float>(0)*invZ1+cx;im1y = fy*p3dC1.at<float>(1)*invZ1+cy;//参考帧上的重投影误差,这个的确就是按照定义来的float squareError1 = (im1x-kp1.pt.x)*(im1x-kp1.pt.x)+(im1y-kp1.pt.y)*(im1y-kp1.pt.y);// 重投影误差太大,跳过淘汰if(squareError1>th2)continue;// Check reprojection error in second image// 计算3D点在第二个图像上的投影误差,计算过程和第一个图像类似float im2x, im2y;// 注意这里的p3dC2已经是第二个相机坐标系下的三维点了float invZ2 = 1.0/p3dC2.at<float>(2);im2x = fx*p3dC2.at<float>(0)*invZ2+cx;im2y = fy*p3dC2.at<float>(1)*invZ2+cy;// 计算重投影误差float squareError2 = (im2x-kp2.pt.x)*(im2x-kp2.pt.x)+(im2y-kp2.pt.y)*(im2y-kp2.pt.y);// 重投影误差太大,跳过淘汰if(squareError2>th2)continue;// Step 6 统计经过检验的3D点个数,记录3D点视差角 // 如果运行到这里就说明当前遍历的这个特征点对靠谱,经过了重重检验,说明是一个合格的点,称之为good点 vCosParallax.push_back(cosParallax);//存储这个三角化测量后的3D点在世界坐标系下的坐标vP3D[vMatches12[i].first] = cv::Point3f(p3dC1.at<float>(0),p3dC1.at<float>(1),p3dC1.at<float>(2));//good点计数++nGood++;//判断视差角,只有视差角稍稍大一丢丢的才会给打good点标记//? bug 我觉得这个写的位置不太对。你的good点计数都++了然后才判断,不是会让good点标志和good点计数不一样吗if(cosParallax<0.99998)vbGood[vMatches12[i].first]=true;}// Step 7 得到3D点中较小的视差角,并且转换成为角度制表示if(nGood>0){// 从小到大排序,注意vCosParallax值越大,视差越小sort(vCosParallax.begin(),vCosParallax.end());// !排序后并没有取最小的视差角,而是取一个较小的视差角// 作者的做法:如果经过检验过后的有效3D点小于50个,那么就取最后那个最小的视差角(cos值最大)// 如果大于50个,就取排名第50个的较小的视差角即可,为了避免3D点太多时出现太小的视差角 size_t idx = min(50,int(vCosParallax.size()-1));//将这个选中的角弧度制转换为角度制parallax = acos(vCosParallax[idx])*180/CV_PI;}else//如果没有good点那么这个就直接设置为0了parallax=0;//返回good点计数return nGood;
}结束语
以上就是我学习到的内容,如果对您有帮助请多多支持我,如果哪里有问题欢迎大家在评论区积极讨论,我看到会及时回复。
相关文章:
ORB-SLAM2源码学习:Initializer.cc⑧: Initializer::CheckRT检验三角化结果
前言 ORB-SLAM2源码学习:Initializer.cc⑦: Initializer::Triangulate特征点对的三角化_cv::svd::compute-CSDN博客 经过上面的三角化我们成功得到了三维点,但是经过三角化成功的三维点并不一定是有效的,需要筛选才能作为初始化地图点。 …...

leetcode 2239. 找到最接近 0 的数字
题目:2239. 找到最接近 0 的数字 - 力扣(LeetCode) 加班用手机刷水题,补个记录 1 class Solution { public:int findClosestNumber(vector<int>& nums) {int ret nums[0];for (int i 1; i < nums.size(); i) {if…...

Rust实现内网穿透工具:从原理到实现
目录 1.前言2.内网穿透原理3.丐版实现3.1 share3.2 server3.3 client3.4 测试4.项目优化4.1 工作空间4.2 代码合并4.3 无锁优化4.4 数据分离4.5 错误处理4.6 测试代码4.7 参数解析本篇原文为:Rust实现内网穿透工具:从原理到实现 更多C++进阶、rust、python、逆向等等教程,可…...

【深度学习】1.深度学习解决问题与应用领域
深度学习要解决的问题 一、图像识别相关问题 物体识别 背景和意义:在众多的图像中识别出特定的物体,例如在安防监控领域,识别出画面中的人物、车辆等物体类别。在自动驾驶技术中,车辆需要识别出道路上的行人、交通标志、其他车辆…...
文档解析:PDF里的复杂表格、少线表格如何还原?
PDF中的复杂表格或少线表格还原通常需要借助专业的工具或在线服务,以下是一些可行的方法: 方法一:使用在线PDF转换工具 方法二:使用桌面PDF编辑软件 方法三:通过OCR技术提取表格 方法四:手动重建表格 …...
深圳大学-计算机系统(3)-实验三取指和指令译码设计
实验目标 设计完成一个连续取指令并进行指令译码的电路,从而掌握设计简单数据通路的基本方法。 实验内容 本实验分成三周(三次)完成:1)首先完成一个译码器(30分);2)接…...
Java Swing 编程全面解析:从 AWT 到 Swing 的进化之路
目录 前言 一、AWT 简介 1. 什么是 AWT? 2. AWT 的基本组件 3. AWT 编程示例 二、Swing 的诞生与进化 1. Swing 的特点 2. Swing 和 AWT 的主要区别 3. Swing 的基本组件 三、Swing 编程的基础示例 四、Swing 的高级功能 1. 布局管理器 2. 事件监听 3…...

mysql数据库启动出现Plugin ‘FEEDBACK‘ is disabled.问题解决记录
本人出现该问题的环境是xampp,异常关机,再次在xampp控制面板启动mysql出现该问题。出现问题折腾数据库之前,先备份数据,将mysql目录下的data拷贝到其他地方,这很重要。 然后开始折腾。 查资料,会发现很多…...

2025年大模型对智能硬件发展的助力与创新创意
随着人工智能(AI)技术,尤其是大模型的快速进步,智能硬件领域正在经历前所未有的变革。到2025年,大模型不仅能为智能硬件提供强大的算法支持,还能通过数据处理、智能决策和系统集成等方面的创新,推动硬件设备的性能提升和功能拓展。本文将从多个维度分析大模型对智能硬件…...
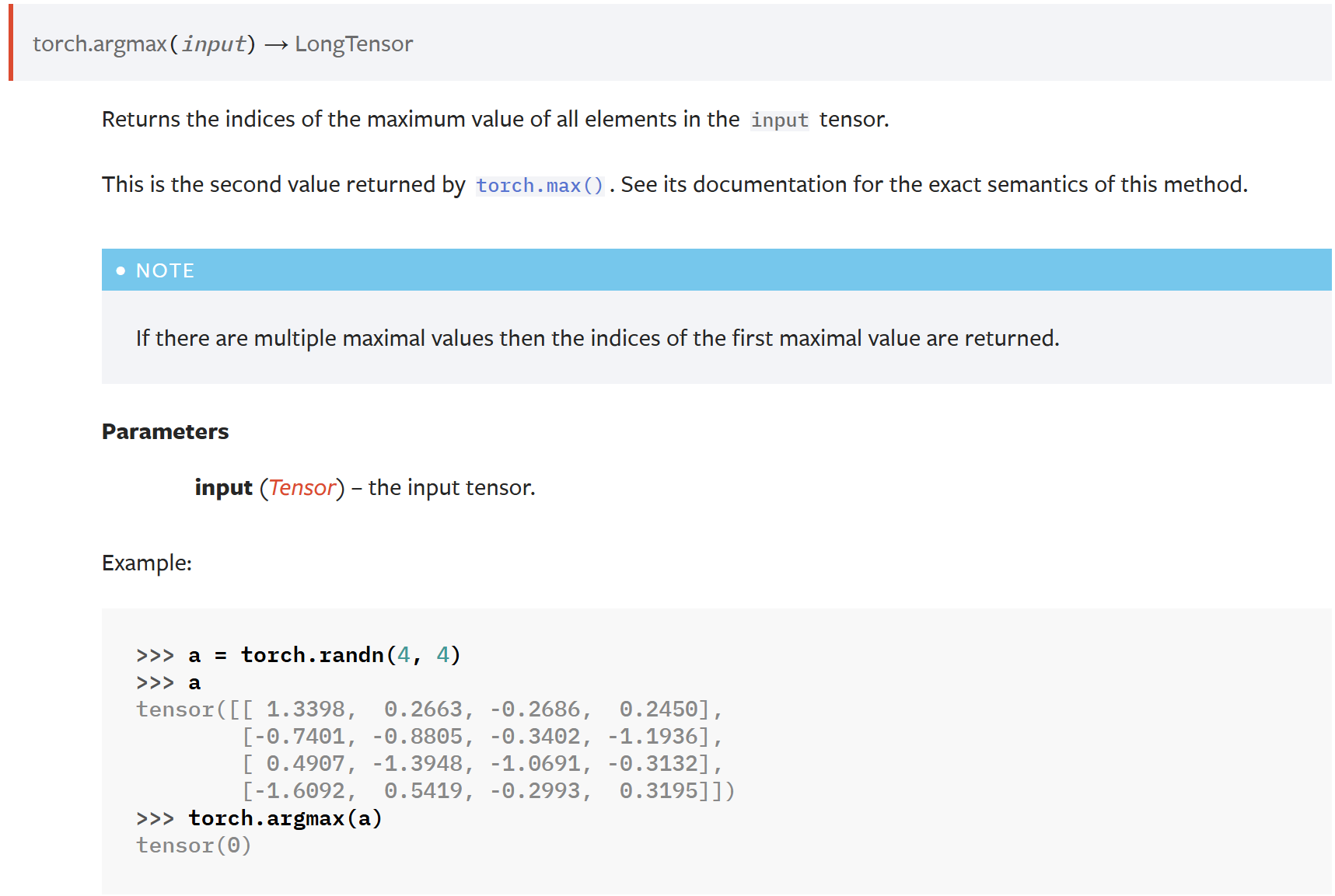
Tensor 基本操作1 unsqueeze, squeeze, softmax | PyTorch 深度学习实战
本系列文章 GitHub Repo: https://github.com/hailiang-wang/pytorch-get-started 目录 创建 Tensor常用操作unsqueezesqueezeSoftmax代码1代码2代码3 argmaxitem 创建 Tensor 使用 Torch 接口创建 Tensor import torch参考:https://pytorch.org/tutorials/beginn…...
Python - itertools- pairwise函数的详解
前言: 最近在leetcode刷题时用到了重叠对pairwise,这里就讲解一下迭代工具函数pairwise,既介绍给大家,同时也提醒一下自己,这个pairwise其实在刷题中十分有用,相信能帮助到你。 参考官方讲解:itertools --- 为高效循…...

Docker可视化管理工具Portainer
Portainer简介 Portainer 是一个轻量级的、开源的容器管理工具,提供了一个直观的 Web 用户界面(UI),用于管理 Docker 和 Kubernetes 环境。它简化了容器的部署、监控和管理,特别适合不熟悉命令行操作的用户或团队。 …...

WPF实战案例 | C# WPF实现大学选课系统
WPF实战案例 | C# WPF实现大学选课系统 一、设计来源1.1 主界面1.2 登录界面1.3 新增课程界面1.4 修改密码界面 二、效果和源码2.1 界面设计(XAML)2.2 代码逻辑(C#) 源码下载更多优质源码分享 作者:xcLeigh 文章地址&a…...

leetcode 面试经典 150 题:有效的括号
链接有效的括号题序号20题型字符串解法栈难度简单熟练度✅✅✅ 题目 给定一个只包括 ‘(’,‘)’,‘{’,‘}’,‘[’,‘]’ 的字符串 s ,判断字符串是否有效。 有效字符串需满足: 左括号必须…...
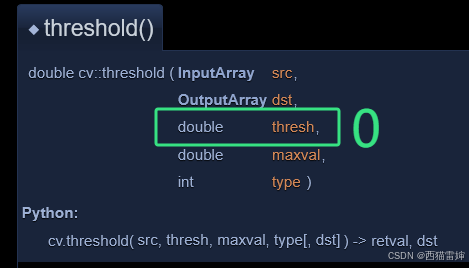
python学opencv|读取图像(三十九 )阈值处理Otsu方法
【1】引言 前序学习了5种阈值处理方法,包括(反)阈值处理、(反)零值处理和截断处理,还学习了一种自适应处理方法,相关文章链接为: python学opencv|读取图像(三十三)阈值处理-灰度图像-CSDN博客 python学o…...

GBase8c aes_encrypt和aes_decrypt函数
在数据库中,aes_encrypt和aes_decrypt函数进行加解密时使用的块加密模式。 GBase8c 与 MySQL 的aes_encrypt和aes_decrypt函数区别: 1、GBase8c 中的初始化向量init_vector不能为空 2、MySQL的加密模块block_encryption_mode 为aes-128-ecb,…...

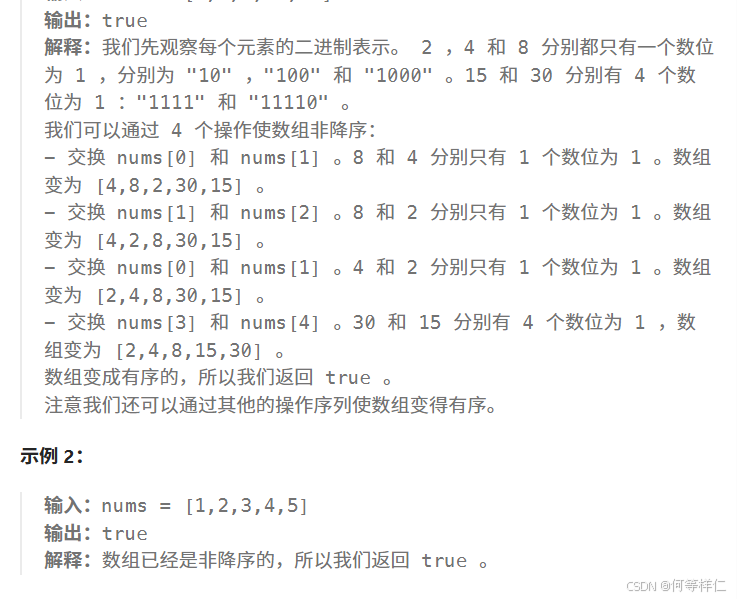
【2024年华为OD机试】(B卷,100分)- 数据分类 (Java JS PythonC/C++)
一、问题描述 题目描述 对一个数据a进行分类,分类方法为: 此数据a(四个字节大小)的四个字节相加对一个给定的值b取模,如果得到的结果小于一个给定的值c,则数据a为有效类型,其类型为取模的值;如果得到的结果大于或者等于c,则数据a为无效类型。 比如一个数据a=0x010…...
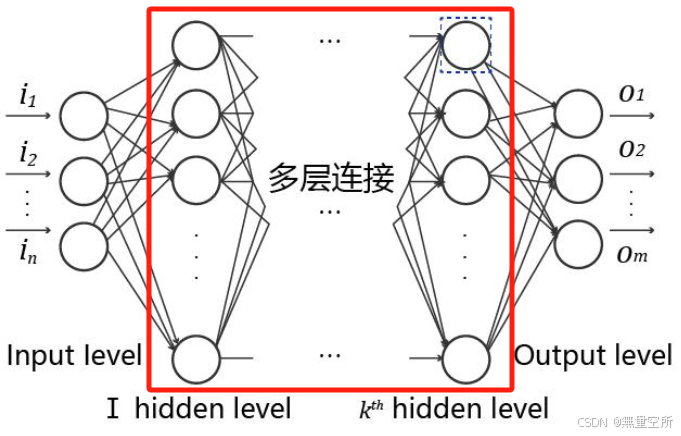
机器学习 vs 深度学习
目录 一、机器学习 1、实现原理 2、实施方法 二、深度学习 1、与机器学习的联系与区别 2、神经网络的历史发展 3、神经网络的基本概念 一、机器学习 1、实现原理 训练(归纳)和预测(演绎) 归纳: 从具体案例中抽象一般规律…...
flutter_学习记录_00_环境搭建
1.参考文档 Mac端Flutter的环境配置看这一篇就够了 flutter的中文官方文档 2. 本人环境搭建的背景 本人的电脑的是Mac的,iOS开发,所以iOS开发环境本身是可用的;外加Mac电脑本身就会配置Java的环境。所以,后面剩下的就是&#x…...

SpringBoot如何自定义Starter ?
大家好,我是锋哥。今天分享关于【SpringBoot如何自定义Starter ?】面试题。希望对大家有帮助; SpringBoot如何自定义Starter ? 1000道 互联网大厂Java工程师 精选面试题-Java资源分享网 在 Spring Boot 中,自定义 Starter 是一种将应用程…...
)
Goframe项目实战:从数据库表到API接口的全链路开发指南(含避坑点)
Goframe项目实战:从数据库表到API接口的全链路开发指南(含避坑点)在当今微服务架构盛行的时代,Go语言因其高性能和并发优势成为后端开发的热门选择。而Goframe作为一款企业级的Go应用开发框架,提供了从数据库操作到API…...

Hirschmann RS20-0800M4M4SDAE工业以太网交换机
Hirschmann RS20-0800M4M4SDAE 工业以太网交换机产品特点:端口配置:共8个端口,含6个RJ45电口和2个ST光纤接口。端口速率:所有端口均为100Mbps快速以太网。光纤类型:2个光纤端口为多模、ST接头。管理类型:二…...

Agent开发面试通关攻略:吃透稳拿offer
阅读前置:2026年当下最卷也最缺人的AI岗位,一定是AI Agent开发。最近刷遍CSDN、牛客、力扣最新面经,发现一个非常明显的招聘趋势:普通大模型微调岗位饱和内卷,而AI Agent开发岗位人才严重缺口,薪资更高、竞…...

【UniApp小程序开发】解决无法使用Vue自定义指令的完美替代方案:权限组件封装
在 UniApp 开发中,你是否遇到过这样的困惑:明明在 Vue Web 项目中用得顺手的 v-permission 自定义指令,一到小程序端就完全失效?本文将深入剖析其原因,并提供一套可直接复用的组件化解决方案,让你在小程序中…...

2026年,揭秘那些真正安全的原生态食材厂家你不可不知的秘密
随着人们生活水平的提升以及对健康的日益重视,选择真正安全的原生态食材已经成为许多人购买食物的标准。但市场的繁杂使得甄别真正安全的食材厂家变得愈加困难。今天,我将通过几个关键角度,为大家揭秘那些真正安全的原生态食材厂家的秘密&…...

PCB虚焊/走线断裂/焊盘脱落工程师易漏判
PCB 故障中,30% 并非元件损坏,而是 PCB 本身的隐性故障—— 虚焊、走线断裂、焊盘脱落、过孔开路。这类故障外观隐蔽、时好时坏、排查难度大,很多工程师反复更换元件仍无法解决,最终误判为 “板报废”。一、PCB 隐性故障核心成因…...

HDI 高密度互连板阶数的深度理解
一、概述高密度互连板(High Density Interconnector, HDI)是通过激光微孔技术和逐层积层工艺实现高密度布线的印制电路板。其阶数划分是行业内统一的技术标准,核心依据为独立积层压合次数与配套激光盲孔制程次数,而非单面层数或钻…...

从游戏引擎到仿真平台:手把手教你用AirSim+UE4搭建你的第一个无人机/自动驾驶仿真环境
从游戏引擎到仿真平台:构建AirSimUE4无人机与自动驾驶仿真环境实战指南当游戏引擎遇上机器人算法测试,会碰撞出怎样的火花?微软开源的AirSim项目将虚幻引擎(Unreal Engine)从游戏开发领域引入到自动驾驶和无人机研究的…...

yolo视频识别 车辆速度估计识别 yolo11视频实时速度测量与测速估计
文章目录YOLOv11:视频实时速度测量与测速估计一、YOLOv11概述二、速度测量原理三、距离测量方法四、应用场景五、实践案例以下是关于使用YOLOv11进行视频实时速度测量与测速估计的介绍: YOLOv11:视频实时速度测量与测速估计 随着计算机视觉…...

如何快速解锁中兴光猫权限:zteOnu工具完整使用指南
如何快速解锁中兴光猫权限:zteOnu工具完整使用指南 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 中兴光猫作为家庭网络的核心设备,其强大的硬件性能常常被默认…...