动态规划——斜率优化DP
题目清单
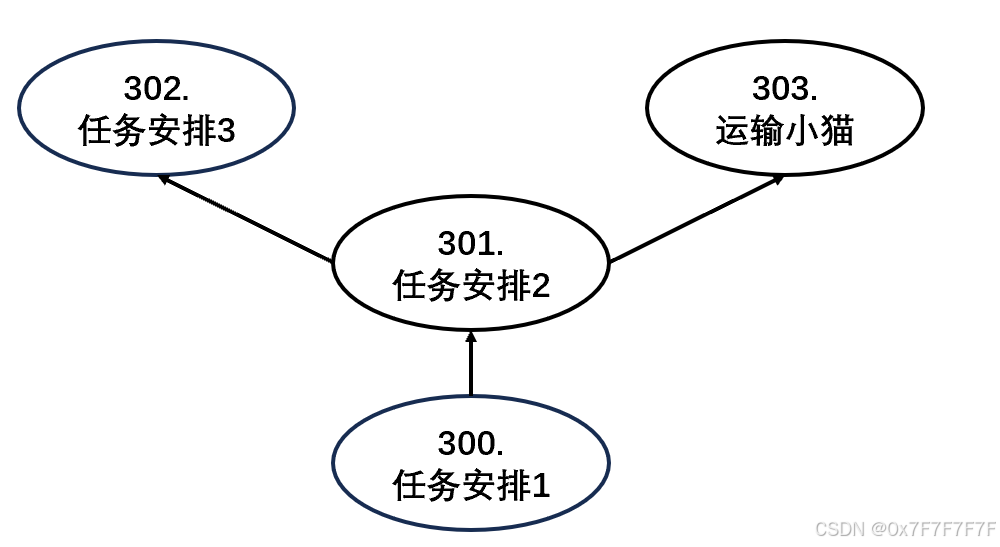
acwing300.任务安排1
状态表示f[i]:
集合:完成前i个任务且第i个任务为最后一个批次最后一个任务的方案。
属性:min
状态计算:
f [ i ] = m i n { f [ j ] + s u m t [ i ] × ∑ j + 1 i w [ u ] + s × ∑ j + 1 n w [ i ] } f[i]=min\{f[j]+sumt[i] ×\sum_{j+1}^{i}w[u]+s×\sum_{j+1}^{n}w[i]\} f[i]=min{f[j]+sumt[i]×∑j+1iw[u]+s×∑j+1nw[i]} ( 0 ≤ j < i ) (0\leq j < i) (0≤j<i)
f [ i ] = m i n { f [ j ] + s u m t [ i ] × ( s u m c [ i ] − s u m c [ j ] ) + s × ( s u m c [ n ] − s u m c [ j ] ) } f[i]=min\{f[j]+sumt[i] ×(sumc[i]-sumc[j])+s×(sumc[n]-sumc[j])\} f[i]=min{f[j]+sumt[i]×(sumc[i]−sumc[j])+s×(sumc[n]−sumc[j])} ( 0 ≤ j < i ) (0\leq j < i) (0≤j<i)
时间复杂度为 O ( n 2 ) O(n^2) O(n2)
#include <iostream>
#include <cstring>
using namespace std;
const int N = 5010;
typedef long long ll;
ll f[N];
ll sumt[N], sumc[N];
int n, s;
int main()
{cin >> n >> s;for (int i = 1; i <= n; i ++ ){scanf("%lld%lld", &sumt[i], &sumc[i]);sumt[i] += sumt[i - 1];sumc[i] += sumc[i - 1];}memset(f, 0x3f, sizeof f);f[0] = 0;for (int i = 1; i <= n; i ++ ){for (int j = 0; j < i; j ++ ){f[i] = min(f[i], f[j] + sumt[i] * (sumc[i] - sumc[j]) + s * (sumc[n] - sumc[j]));}}cout << f[n];return 0;
}
acwing301.任务安排2
我们对上一题得到的状态转移方程 f [ i ] = m i n { f [ j ] + s u m t [ i ] × ( s u m c [ i ] − s u m c [ j ] ) + s × ( s u m c [ n ] − s u m c [ j ] ) } f[i]=min\{f[j]+sumt[i] ×(sumc[i]-sumc[j])+s×(sumc[n]-sumc[j])\} f[i]=min{f[j]+sumt[i]×(sumc[i]−sumc[j])+s×(sumc[n]−sumc[j])} ( 0 ≤ j < i ) (0\leq j < i) (0≤j<i)进行编变形。
f [ i ] = f [ j ] + s u m t [ i ] × s u m c [ i ] − s u m t [ i ] × s u m c [ j ] + s × s u m c [ n ] − s × s u m c [ j ] f[i]=f[j]+sumt[i] ×sumc[i]-sumt[i]×sumc[j]+s×sumc[n]-s×sumc[j] f[i]=f[j]+sumt[i]×sumc[i]−sumt[i]×sumc[j]+s×sumc[n]−s×sumc[j]
f [ i ] = f [ j ] − s u m t [ i ] × s u m c [ j ] − s × s u m c [ j ] + s u m t [ i ] × s u m c [ i ] + s × s u m c [ n ] f[i]=f[j]-sumt[i]×sumc[j]-s×sumc[j]+sumt[i] ×sumc[i]+s×sumc[n] f[i]=f[j]−sumt[i]×sumc[j]−s×sumc[j]+sumt[i]×sumc[i]+s×sumc[n]
f [ i ] = f [ j ] − ( s u m t [ i ] + s ) × s u m c [ j ] + s u m t [ i ] × s u m c [ i ] + s × s u m c [ n ] f[i]=f[j]-(sumt[i]+s)×sumc[j]+sumt[i] ×sumc[i]+s×sumc[n] f[i]=f[j]−(sumt[i]+s)×sumc[j]+sumt[i]×sumc[i]+s×sumc[n]
移项得到
f [ j ] = ( s u m t [ i ] + s ) × s u m c [ j ] − s u m t [ i ] × s u m c [ i ] − s × s u m c [ n ] + f [ i ] f[j]=(sumt[i]+s)×sumc[j]-sumt[i] ×sumc[i]-s×sumc[n]+f[i] f[j]=(sumt[i]+s)×sumc[j]−sumt[i]×sumc[i]−s×sumc[n]+f[i]
上式是 y = k x + b y=kx+b y=kx+b的形式, y y y是 f [ j ] f[j] f[j], k k k是 ( s u m t [ i ] + s ) (sumt[i]+s) (sumt[i]+s), x x x是 s u m c [ j ] sumc[j] sumc[j], b b b是 f [ i ] − s u m t [ i ] × s u m c [ i ] − s × s u m c [ n ] f[i]-sumt[i] ×sumc[i]-s×sumc[n] f[i]−sumt[i]×sumc[i]−s×sumc[n]。
我们的目标是求 f [ i ] f[i] f[i]的最小值,因为 b b b中除了 f [ i ] f[i] f[i]以外的部分是常量,也正因此等价于去想办法让截距最小。因为 k k k也是一个常量, 所以本问题又可以转化为给定一条斜率固定的直线去找过一个 ( x , y ) (x,y) (x,y)点对,使得 b b b最小。 ( x , y ) (x,y) (x,y)点对有 ( s u m c [ 0 ] , f [ 0 ] ) (sumc[0],f[0]) (sumc[0],f[0]), ( s u m c [ 1 ] , f [ 1 ] ) (sumc[1],f[1]) (sumc[1],f[1]),…, ( s u m c [ i − 1 ] , f [ i − 1 ] ) (sumc[i-1],f[i-1]) (sumc[i−1],f[i−1])。
给出结论,无论斜率如何变化,最小值一定是取到凸包下边界的一个点。
具体来说,最小值一定是第一个大于直线斜率的线段头部 k i k_i ki的点。
分析题目:
1., k k k是 ( s u m t [ i ] + s ) (sumt[i]+s) (sumt[i]+s),单调递增。
2.新加入点的横坐标也是单调递增。
由于斜率 k k k是单调递增的,也就是说,如果当前的斜率 k k k大于队头两个点的斜率时,那么一开始的点就可以彻底删除,在以后也不会用到,所以凸包中的点可以用单调队列来维护。
维护一个凸包的做法:
1.查询的时候,把队头小于当前斜率k的点删掉。
f [ q [ h h + 1 ] − f [ q [ h h ] s u m c [ q [ h h + 1 ] ] − s u m c [ q [ h h ] ≤ s u m t [ i ] + s \frac{f[q[hh+1]-f[q[hh]}{sumc[q[hh+1]]-sumc[q[hh]}\leq sumt[i]+s sumc[q[hh+1]]−sumc[q[hh]f[q[hh+1]−f[q[hh]≤sumt[i]+s
2.插入的时候,把不在凸包上的点删掉。
f [ q [ t t ] − f [ q [ t t − 1 ] s u m c [ q [ h h ] ] − s u m c [ q [ h h − 1 ] ≥ f [ i ] − f [ q [ t t ] ] s u m c [ i ] − s u m c [ q [ h h ] ] \frac{f[q[tt]-f[q[tt-1]}{sumc[q[hh]]-sumc[q[hh-1]}\geq \frac{f[i]-f[q[tt]]}{sumc[i]-sumc[q[hh]]} sumc[q[hh]]−sumc[q[hh−1]f[q[tt]−f[q[tt−1]≥sumc[i]−sumc[q[hh]]f[i]−f[q[tt]]
时间复杂度为 O ( n ) O(n) O(n)
#include <iostream>
using namespace std;
typedef long long ll;
const int N = 300010;
int q[N];
ll t[N], c[N];
ll f[N];
int n, s;
int main()
{cin >> n >> s;for (int i = 1; i <= n; i ++ ){scanf("%lld%lld", &t[i], &c[i]);t[i] += t[i - 1];c[i] += c[i - 1];}int hh = 0, tt = 0;for (int i = 1; i <= n; i ++ ){while (hh < tt && f[q[hh + 1]] - f[q[hh]] <= (t[i] + s) * (c[q[hh + 1]] - c[q[hh]])) hh ++ ;int j = q[hh];f[i] = f[j] + t[i] * (c[i] - c[j]) + s * (c[n] - c[j]);while (hh < tt && (f[q[tt]] - f[q[tt - 1]]) * (c[i] - c[q[tt]]) >= (f[i] - f[q[tt]]) * (c[q[tt]] - c[q[tt - 1]])) tt -- ;q[++ tt] = i;}cout << f[n];return 0;
}
acwing302.任务安排3
和上一题不同的是, 本题中机器的工作时间可以为负数,也正因此斜率 k k k并不是随着 i i i单调递增的了,上一题中,对于凸包的头部和尾部均使用单调队列来处理,本题则需要使用二分去找到合适的点对,对尾部的处理同样使用单调队列。
#include <iostream>
using namespace std;
const int N = 300010;
typedef long long ll;
ll t[N], c[N];
ll f[N];
int q[N];
int n, s;
int main()
{cin >> n >> s;for (int i = 1; i <= n; i ++ ){scanf("%lld%lld", &t[i], &c[i]);t[i] += t[i - 1];c[i] += c[i - 1];}int hh = 0, tt = 0;for (int i = 1; i <= n; i ++ ){int l = hh, r = tt;while (l < r){int mid = l + r >> 1;if (f[q[mid + 1]] - f[q[mid]] > (double)(t[i] + s) * (c[q[mid + 1]] - c[q[mid]])) r = mid;else l = mid + 1;}int j = q[l];f[i] = f[j] - (t[i] + s) * c[j] + t[i] * c[i] + s * c[n];while (hh < tt && (double)(f[q[tt]] - f[q[tt - 1]]) * (c[i] - c[q[tt]]) >= (double)(f[i] - f[q[tt]]) * (c[q[tt]] - c[q[tt - 1]])) tt -- ;q[++ tt] = i;}cout << f[n];return 0;
}
acwing303.运输小猫
每一只小猫都会对应一个最早出发时间 a [ i ] = t [ i ] − d [ h [ i ] ] a[i]=t[i]-d[h[i]] a[i]=t[i]−d[h[i]],也就是结束玩耍的时间减去到1号山的距离。当我们处理完 a a a数组后,对数组 a a a进行一个从小打到的排序。这样一来,相邻一段猫肯定是要由一个饲养员接走的,饲养员的出发时间就是这一段最后一只猫对应的数组 a a a的值。
状态表示f[i][j]:
集合:对于前 i i i只猫,安排 j j j个饲养员去接猫的所有方案。
属性:min
状态计算:
f [ i ] [ j ] = m i n { f [ k ] [ j − 1 ] + ∑ k + 1 i ( a i − a u ) } f[i][j]=min\{f[k][j-1]+\sum_{k+1}^{i}(a_i-a_u)\} f[i][j]=min{f[k][j−1]+∑k+1i(ai−au)} ( 0 ≤ k < i ) \ \ \ (0\leq k <i) (0≤k<i)
f [ i ] [ j ] = m i n { f [ k ] [ j − 1 ] + ∑ k + 1 i a i − ∑ k + 1 i a u } f[i][j]=min\{f[k][j-1]+\sum_{k+1}^{i}a_i-\sum_{k+1}^{i}a_u\} f[i][j]=min{f[k][j−1]+∑k+1iai−∑k+1iau} ( 0 ≤ k < i ) \ \ \ (0\leq k <i) (0≤k<i)
f [ i ] [ j ] = m i n { f [ k ] [ j − 1 ] + ( i − k ) a i − ( s [ i ] − s [ k ] ) } f[i][j]=min\{f[k][j-1]+(i-k)a_i-(s[i]-s[k])\} f[i][j]=min{f[k][j−1]+(i−k)ai−(s[i]−s[k])} ( 0 ≤ k < i ) \ \ \ (0\leq k <i) (0≤k<i)
移项得:
f [ k ] [ j − 1 ] + s [ k ] = a [ i ] × k + f [ i ] [ j ] + s [ i ] − i a [ i ] f[k][j-1]+s[k]=a[i] ×k+f[i][j]+s[i]-ia[i] f[k][j−1]+s[k]=a[i]×k+f[i][j]+s[i]−ia[i]
至此,本题就转换为了任务安排2。
#include <iostream>
#include <algorithm>
#include <cstring>
using namespace std;
typedef long long ll;
const int N = 100010;
const int P = 110;
ll f[P][N];
ll a[N];
ll s[N];
int d[N];
int q[N];
int n, m, p;
ll get_y(int j, int k)
{return f[j - 1][k] + s[k];
}
int main()
{cin >> n >> m >> p;for (int i = 2; i <= n; i ++ ){scanf("%d", &d[i]);d[i] += d[i - 1];}for (int i = 1; i <= m; i ++ ){ll h, t;scanf("%lld%lld", &h, &t);a[i] = t - d[h];}sort(a + 1, a + m + 1);for (int i = 1; i <= m; i ++ ){s[i] = a[i];s[i] += s[i - 1];}memset(f,0x3f,sizeof f);for(int i = 0;i <= p;i ++)f[i][0] = 0;for (int i = 1; i <= p; i ++ ){int hh = 0, tt = 0;for (int j = 1; j <= m; j ++ ){while (hh < tt && get_y(i, q[hh + 1]) - get_y(i, q[hh]) <= (q[hh + 1] - q[hh]) * a[j]) hh ++;int k = q[hh];f[i][j] = f[i - 1][k] + (j - k) * a[j] - (s[j] - s[k]);while (hh < tt && (get_y(i, q[tt]) - get_y(i, q[tt - 1])) * (j - q[tt]) >= (get_y(i, j) - get_y(i, q[tt])) * (q[tt] - q[tt - 1])) tt --;q[++ tt] = j;}}cout << f[p][m];return 0;
}
相关文章:
动态规划——斜率优化DP
题目清单 acwing300.任务安排1 状态表示f[i]: 集合:完成前i个任务且第i个任务为最后一个批次最后一个任务的方案。 属性:min 状态计算: f [ i ] m i n { f [ j ] s u m t [ i ] ∑ j 1 i w [ u ] s ∑ j 1 n w [ i ] } f[i]min\{f[j…...

【深度之眼cs231n第七期】笔记(三十一)
目录 强化学习什么是强化学习?马尔可夫决策过程(MDP)Q-learning策略梯度SOTA深度强化学习 还剩一点小尾巴,还是把它写完吧。(距离我写下前面那行字又过了好几个月了【咸鱼本鱼】)(汗颜ÿ…...
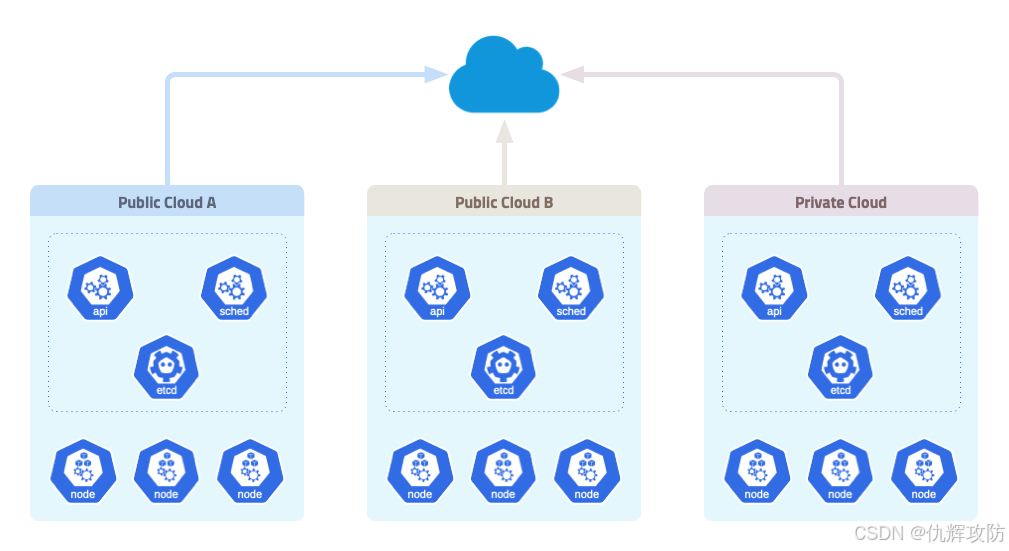
【云安全】云原生-K8S-简介
K8S简介 Kubernetes(简称K8S)是一种开源的容器编排平台,用于管理容器化应用的部署、扩展和运维。它由Google于2014年开源并交给CNCF(Cloud Native Computing Foundation)维护。K8S通过提供自动化、灵活的功能…...

SpringBoot中Excel表的导入、导出功能的实现
文章目录 一、easyExcel简介二、Excel表的导出2.1 添加 Maven 依赖2.2 创建导出数据的实体类4. 编写导出接口5. 前端代码6. 实现效果 三、excel表的导出1. Excel表导入的整体流程1.1 配置文件存储路径 2. 前端实现2.1 文件上传组件 2.2 文件上传逻辑3. 后端实现3.1 文件上传接口…...
)
Spark入门(Python)
目录 一、安装Spark 二、Spark基本操作 一、安装Spark pip3 install pyspark 二、Spark基本操作 # 导入spark的SparkContext,SparkConf模块 from pyspark import SparkContext, SparkConf # 导入os模块 import os # 设置PYSPARK的python环境 os.environ[PYSPARK_PYTHON] &…...

Daemon进程创建过程
Daemon创建过程: 1、fork,创建子进程。退出父进程。 2、setsid,创建新会话。脱离原会话、进程组、控制终端。 再次fork,与终端完全脱离。第二次fork的意义???? 先脱离原父进程&#…...

在sortablejs的拖拽排序情况下阻止input拖拽事件
如题 问题 在vue3的elementPlus的table中,通过sortablejs添加了行拖拽功能,但是在行内会有输入框,此时拖拽输入框会触发sortablejs的拖拽功能 解决 基于这个现象,我怀疑是由于拖拽事件未绑定而冒泡到后面的行上从而导致的拖拽…...
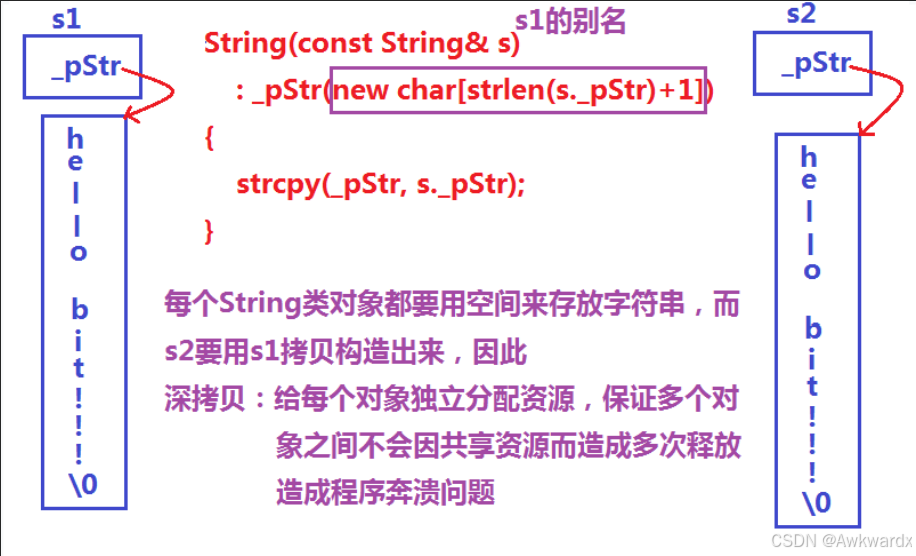
C++初阶—string类
第一章:为什么要学习string类 1.1 C语言中的字符串 C语言中,字符串是以\0结尾的一些字符的集合,为了操作方便,C标准库中提供了一些str系列的库函数,但是这些库函数与字符串是分离开的,不太符合OOP的思想&…...

C# 提取PDF表单数据
目录 使用工具 C# 提取多个PDF表单域的数据 C# 提取特定PDF表单域的数据 PDF表单是一种常见的数据收集工具,广泛应用于调查问卷、业务合同等场景。凭借出色的跨平台兼容性和标准化特点,PDF表单在各行各业中得到了广泛应用。然而,当需要整合…...
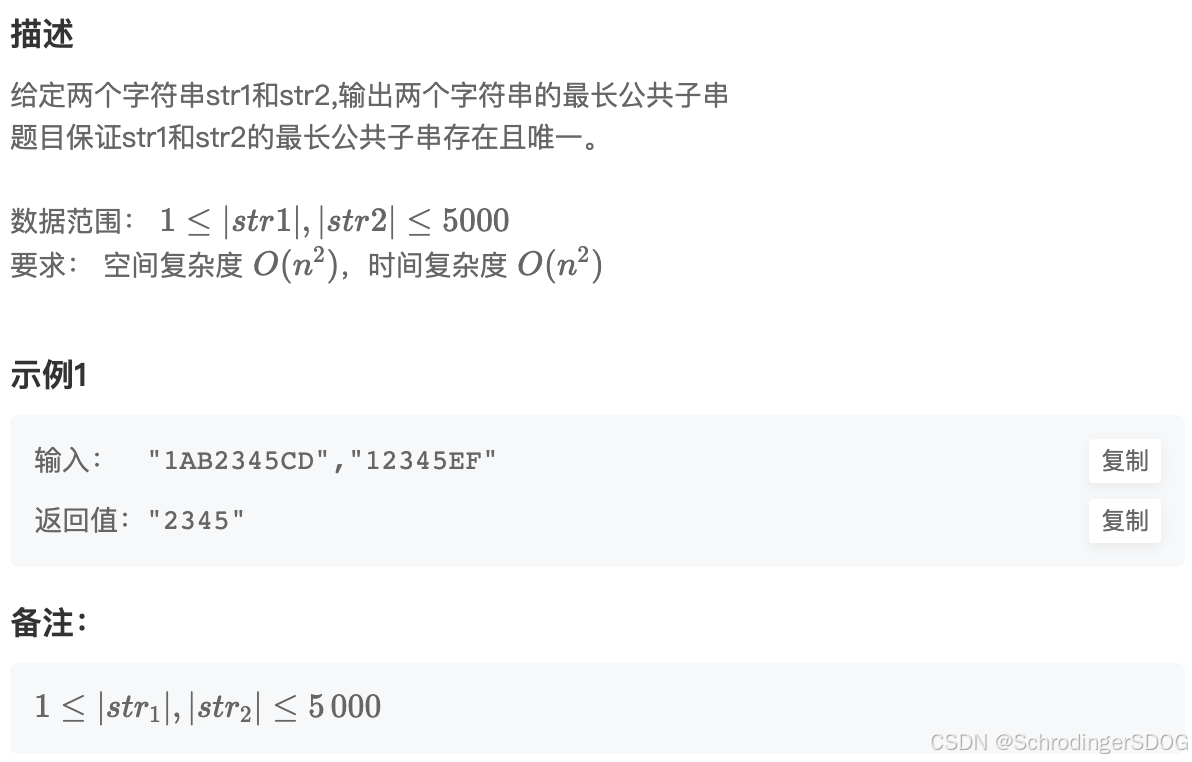
算法刷题Day28:BM66 最长公共子串
题目链接,点击跳转 题目描述: 解题思路: 方法一:暴力枚举 遍历str1的每个字符x,并在str2中寻找以相同元素x为起始的最长字符串。记录最长的公共子串及其长度。 代码实现: def LCS(self, str1: str, st…...
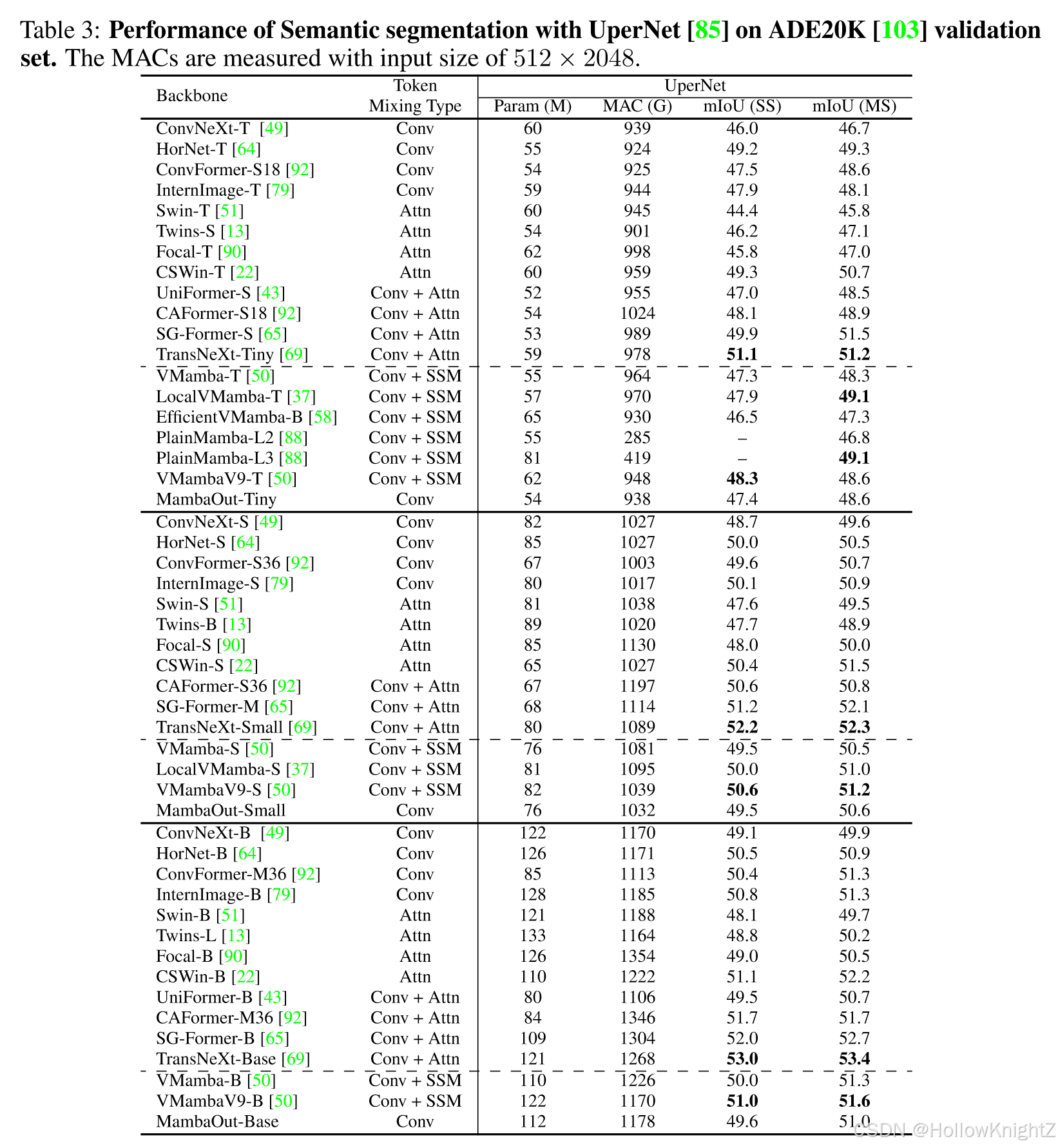
论文阅读笔记:MambaOut: Do We Really Need Mamba for Vision?
论文阅读笔记:MambaOut: Do We Really Need Mamba for Vision? 1 背景2 创新点3 方法4 模块4.1 Mamba适合什么任务4.2 视觉识别任务是否有很长的序列4.3 视觉任务是否需要因果token混合模式4.4 关于Mamba对于视觉的必要性假设 5 效果 论文:https://arxi…...
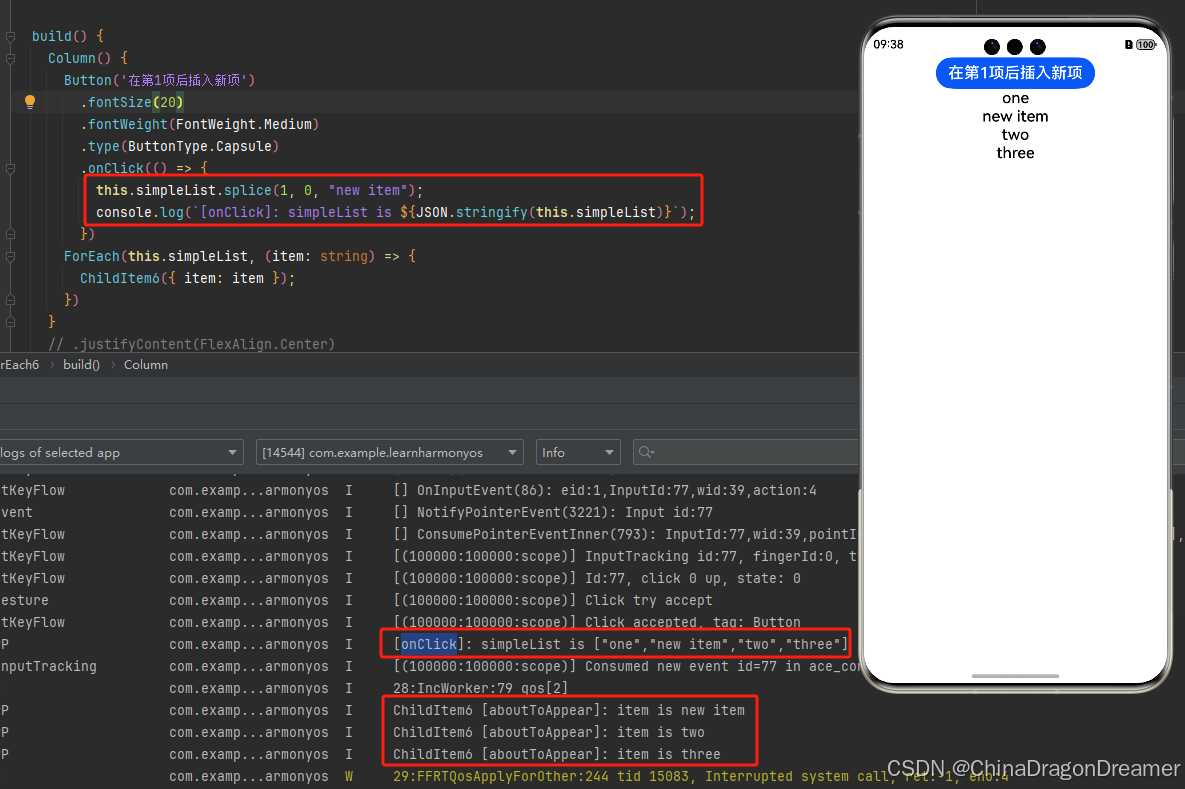
HarmonyOS:ForEach:循环渲染
一、前言 ForEach接口基于数组类型数据来进行循环渲染,需要与容器组件配合使用,且接口返回的组件应当是允许包含在ForEach父容器组件中的子组件。例如,ListItem组件要求ForEach的父容器组件必须为List组件。 API参数说明见:ForEa…...

Python3 【函数】项目实战:5 个新颖的学习案例
Python3 【函数】项目实战:5 个新颖的学习案例 本文包含5编程学习案例,具体项目如下: 简易聊天机器人待办事项提醒器密码生成器简易文本分析工具简易文件加密解密工具 项目 1:简易聊天机器人 功能描述: 实现一个简易…...

XSS 漏洞全面解析:原理、危害与防范
目录 前言编辑 漏洞原理 XSS 漏洞的危害 检测 XSS 漏洞的方法 防范 XSS 漏洞的措施 前言 在网络安全的复杂版图中,XSS 漏洞,即跨站脚本攻击(Cross - Site Scripting),是一类极为普遍且威胁巨大的安全隐患。随着互…...

从 GShard 到 DeepSeek-V3:回顾 MoE 大模型负载均衡策略演进
作者:小天狼星不来客 原文:https://zhuanlan.zhihu.com/p/19117825360 故事要从 GShard 说起——当时,人们意识到拥有数十亿甚至数万亿参数的模型可以通过某种形式的“稀疏化(sparsified)”来在保持高精度的同时加速训…...

【回溯+剪枝】回溯算法的概念 全排列问题
文章目录 46. 全排列Ⅰ. 什么是回溯算法❓❓❓Ⅱ. 回溯算法的应用1、组合问题2、排列问题3、子集问题 Ⅲ. 解题思路:回溯 剪枝 46. 全排列 46. 全排列 给定一个不含重复数字的数组 nums ,返回其 所有可能的全排列 。你可以 按任意顺序 返回答案。 …...

Flutter解决macbook M芯片Android Studio中不显示IOS真机的问题
下载了最新的Android Studio LadyBug 下载了最新的xcode16.2 结果,只有安卓真机才在Android studio显示, IOS真机只在xcode显示 IOS真机不在android studio显示。 解决方法是: 在终端运行如下命令: sudo xcode-select -s /Applic…...

自签证书的dockerfile中from命令无法拉取镜像而docker的pull命令能拉取镜像
问题现象: docker pull images拉取镜像正常 dockerfile中的from命令拉取镜像就会报出证书错误。报错信息如下: [bjxtbwj-kvm-test-jenkins-6-243 ceshi_dockerfile]$ docker build . [] Building 0.4s (3/3) FINISHED …...

【MySQL】--- 复合查询 内外连接
Welcome to 9ilks Code World (๑•́ ₃ •̀๑) 个人主页: 9ilk (๑•́ ₃ •̀๑) 文章专栏: MySQL 🏠 基本查询回顾 假设有以下表结构: 查询工资高于500或岗位为MANAGER的雇员,同时还要满足他们的姓名首字母为…...

QT TLS initialization failed
qt使用QNetworkAccessManager下载文件(给出的链接可以在浏览器里面下载文件),下载失败, 提示“TLS initialization failed”通常是由于Qt在使用HTTPS进行文件下载时,未能正确初始化TLS(安全传输层协议&…...

Adobe-GenP终极指南:5分钟破解Adobe创意套件限制的完整教程
Adobe-GenP终极指南:5分钟破解Adobe创意套件限制的完整教程 【免费下载链接】Adobe-GenP Adobe CC 2019/2020/2021/2022/2023 GenP Universal Patch 3.0 项目地址: https://gitcode.com/gh_mirrors/ad/Adobe-GenP 你是否曾因为Adobe Creative Cloud高昂的订阅…...

FPGA高速ADC数据采集实战——基于AD9253 LVDS接口与ISERDESE2设计
1. AD9253高速ADC核心特性解析 AD9253这颗14位125MSPS四通道ADC芯片,在通信和医疗成像领域堪称经典。我经手过的多个雷达项目中,它的信噪比表现总能带来惊喜——75.3dBFS的实测数据比手册标称值还要稳定。但真正让工程师们又爱又恨的,是它那个…...

NVIDIA Profile Inspector深度解析:解锁显卡隐藏性能的实战指南
NVIDIA Profile Inspector深度解析:解锁显卡隐藏性能的实战指南 【免费下载链接】nvidiaProfileInspector 项目地址: https://gitcode.com/gh_mirrors/nv/nvidiaProfileInspector 你是否曾为游戏卡顿而烦恼?是否觉得显卡性能总差那么一点&#x…...

深部空间专属孪生,打造密闭硐室独有不可替代透明体系技术白皮书
深部空间专属孪生,打造密闭硐室独有不可替代透明体系技术白皮书副标题:井下专用暗光算法实现三维实时重建,搭配地下专属无感定位、多盲区跨镜穿透追踪、身体指纹特征识别,场景适配独一无二,行业无同类对标方案前言矿山…...

终极指南:使用Python开源工具破解百度网盘限速,实现高速免费下载
终极指南:使用Python开源工具破解百度网盘限速,实现高速免费下载 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 还在为百度网盘几十KB的下载速度而烦恼…...

Rekall:基于时空查询的视频内容智能检索开源框架
1. 项目概述:Rekall,一个面向视频时空查询的开源利器 如果你曾经尝试过从一段长视频里,精准地找出“那个穿红色衣服的人从画面左侧走到右侧的片段”,或者想快速定位“所有出现这只特定宠物狗的镜头”,你就会知道这有多…...

Ruby专属LLM应用框架ruby_llm:从基础集成到生产部署实战
1. 项目概述:一个为Ruby语言量身打造的LLM应用框架如果你是一名Ruby开发者,最近被各种大语言模型(LLM)的应用搞得心痒痒,但看着满世界的Python库和框架感到无从下手,那么crmne/ruby_llm这个项目可能就是你在…...
)
【2026年阿里巴巴集团暑期实习- 5月16日-算法岗-第一题- 分组计数】(题目+思路+JavaC++Python解析+在线测试)
题目内容 给定 nnn 个人的权值序列 a1,a2,…,ana_1,a_2,\dots,a_na...

嵌入式事件驱动框架Curtroller:模块化设计提升开发效率
1. 项目概述与核心价值最近在嵌入式开发社区里,一个名为“Curtroller”的项目引起了我的注意。这个项目由开发者KenWuqianghao在GitHub上开源,名字本身就是一个巧妙的组合——“Curt”(可能是“Current”电流的缩写或“Control”控制的变体&a…...

【2024最新】ElevenLabs日语模型v2.4深度评测:对比VoiceLab、OpenJTalk与Azure Custom Neural TTS的MOS分与实时吞吐数据
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs日语模型v2.4的核心演进与技术定位 ElevenLabs 日语模型 v2.4 并非简单语音合成能力的迭代,而是面向高保真、低延迟、多语境日语语音生成的一次系统性重构。其底层架构从基于 Gri…...