可视化相机pose colmap形式的相机内参外参
目录
内参外参转换
可视化相机pose colmap形式的相机内参外参
内参外参转换
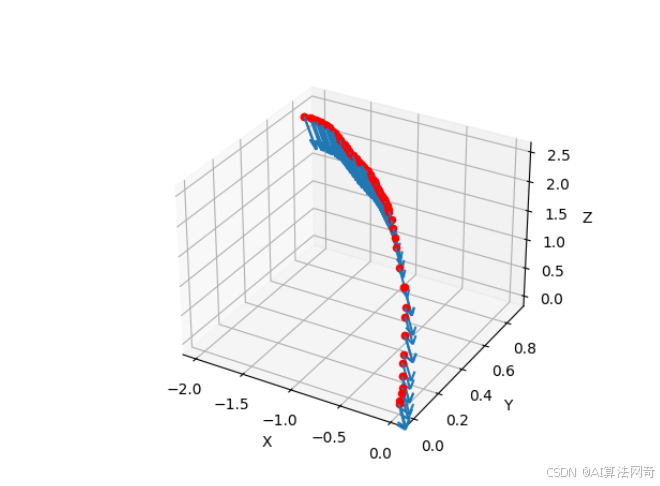
def visualize_cameras(cameras, images):fig = plt.figure()ax = fig.add_subplot(111, projection='3d')for image_id, image_data in images.items():qvec = image_data['qvec']tvec = image_data['tvec']# Convert quaternion to rotation matrixrotation = R.from_quat(qvec).as_matrix()# Plot camera positionax.scatter(tvec[0], tvec[1], tvec[2], c='r', marker='o')# Plot camera orientationcamera_direction = rotation @ np.array([0, 0, 1])ax.quiver(tvec[0], tvec[1], tvec[2], camera_direction[0], camera_direction[1], camera_direction[2], length=0.5, normalize=True)ax.set_xlabel('X')ax.set_ylabel('Y')ax.set_zlabel('Z')plt.show()这段代码用于在3D坐标系中可视化相机的位置和朝向。以下是逐行解释:
-
提取参数:
qvec = image_data['qvec'] # 相机的旋转四元数 (w, x, y, z 或 x, y, z, w,需确认顺序) tvec = image_data['tvec'] # 相机的平移向量 (x, y, z 坐标)
-
四元数转旋转矩阵:
rotation = R.from_quat(qvec).as_matrix() # 将四元数转换为3x3旋转矩阵-
假设
R来自scipy.spatial.transform.Rotation。 -
需确认
qvec的顺序是否为库预期的格式(通常R.from_quat接受(x, y, z, w))。
-
-
绘制相机位置:
ax.scatter(tvec[0], tvec[1], tvec[2], c='r', marker='o') # 在3D图中用红点标记相机位置 -
计算并绘制相机朝向:
camera_direction = rotation @ np.array([0, 0, 1]) # 旋转矩阵乘以Z轴单位向量,得到相机在世界坐标系中的朝向 ax.quiver(tvec[0], tvec[1], tvec[2], camera_direction[0], camera_direction[1], camera_direction[2], length=0.5, normalize=True)-
原理:相机坐标系中默认朝向为Z轴正方向(通常指向拍摄方向),通过旋转矩阵将其转换到世界坐标系。
-
箭头参数:
-
起点为相机位置
(tvec[0], tvec[1], tvec[2])。 -
方向向量为
camera_direction。 -
length=0.5控制箭头显示长度(实际长度可能因归一化调整)。 -
normalize=True确保箭头方向正确,长度统一。
-
-
注意事项:
-
四元数顺序:确认
qvec是否与R.from_quat兼容(SciPy需(x, y, z, w))。 -
坐标系定义:假设相机朝向为Z轴正方向,若实际定义相反(如OpenGL使用-Z),需调整为
[0, 0, -1]。 -
3D绘图设置:确保
ax是3D轴(例如通过fig.add_subplot(111, projection='3d')创建)。
效果:在3D图中,红色圆点表示相机位置,箭头指示其拍摄方向。
可视化相机pose colmap形式的相机内参外参
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from scipy.spatial.transform import Rotation as R
def read_cameras(file_path):cameras = {}with open(file_path, 'r') as file:for line in file:if line[0] == '#':continueparts = line.strip().split()camera_id = int(parts[0])model = parts[1]width = int(parts[2])height = int(parts[3])params = np.array([float(p) for p in parts[4:]])cameras[camera_id] = {'model': model,'width': width,'height': height,'params': params}return camerasdef read_images(file_path):images = {}with open(file_path, 'r') as file:for line in file:if line[0] == '#':continueparts = line.strip().split()if len(parts) == 15:continueimage_id = int(parts[0])qvec = np.array([float(p) for p in parts[1:5]])tvec = np.array([float(p) for p in parts[5:8]])camera_id = int(parts[8])file_name = parts[9]images[image_id] = {'qvec': qvec,'tvec': tvec,'camera_id': camera_id,'file_name': file_name}return imagesdef visualize_cameras(cameras, images):fig = plt.figure()ax = fig.add_subplot(111, projection='3d')for image_id, image_data in images.items():qvec = image_data['qvec']tvec = image_data['tvec']# Convert quaternion to rotation matrixrotation = R.from_quat(qvec).as_matrix()# Plot camera positionax.scatter(tvec[0], tvec[1], tvec[2], c='r', marker='o')# Plot camera orientationcamera_direction = rotation @ np.array([0, 0, 1])ax.quiver(tvec[0], tvec[1], tvec[2], camera_direction[0], camera_direction[1], camera_direction[2], length=0.5, normalize=True)ax.set_xlabel('X')ax.set_ylabel('Y')ax.set_zlabel('Z')plt.show()# 示例使用
cameras = read_cameras('./cameras.txt')
images = read_images('./images.txt')
visualize_cameras(cameras, images)相关文章:
可视化相机pose colmap形式的相机内参外参
目录 内参外参转换 可视化相机pose colmap形式的相机内参外参 内参外参转换 def visualize_cameras(cameras, images):fig plt.figure()ax fig.add_subplot(111, projection3d)for image_id, image_data in images.items():qvec image_data[qvec]tvec image_data[tvec]#…...

数据结构 树2
文章目录 前言 一,二叉搜索树的高度 二,广度优先VS深度优先 三,广度优先的代码实现 四,深度优先代码实现 五,判断是否为二叉搜索树 六,删除一个节点 七,二叉收索树的中序后续节点 总结 …...

GB/T 44721-2024 与 L3 自动驾驶:自动驾驶新时代的基石与指引
1.前言 在智能网联汽车飞速发展的当下,自动驾驶技术成为了行业变革的核心驱动力。从最初的辅助驾驶功能,到如今不断迈向高度自动化的征程,每一步都凝聚着技术的创新与突破。而在这一进程中,标准的制定与完善对于自动驾驶技术的规…...

AURIX TC275学习笔记3 官方例程 (UART LED WDT)
文章目录 参考资料1. ASCLIN_UART_12. GPIO_LED_Button_13. WDT (Watch Dog Timer) 参考资料 AURIX TC275学习笔记1 资料收集Getting Started with AURIX™ Development Studio 官方帮助文档happy hacking for TC275! 硬件平台使用AURIX™ TC275 Lite 套件,按照参…...

Vim的基础命令
移动光标 H(左) J(上) K(下) L(右) $ 表示移动到光标所在行的行尾, ^ 表示移动到光标所在行的行首的第一个非空白字符。 0 表示移动到光标所在行的行首。 W 光标向前跳转一个单词 w光标向前跳转一个单词 B光标向后跳转一个单词 b光标向后跳转一个单词 G 移动光标到…...

Linux的简单使用和部署4asszaaa0
一.部署 1 环境搭建方式主要有四种: 1. 直接安装在物理机上.但是Linux桌面使用起来非常不友好.所以不建议.[不推荐]. 2. 使用虚拟机软件,将Linux搭建在虚拟机上.但是由于当前的虚拟机软件(如VMWare之类的)存在⼀些bug,会导致环境上出现各种莫名其妙的问题比较折腾.[非常不推荐…...

Linux 的 sysfs 伪文件系统介绍【用户可以通过文件操作与内核交互(如调用内核函数),而无需编写内核代码】
1. 什么是 sysfs伪文件系统? sysfs 是 Linux 内核提供的 伪文件系统,用于向用户空间暴露内核对象的信息和控制接口。它是 procfs 的补充,主要用于管理 设备、驱动、内核子系统 等信息,使用户可以通过文件操作(如用户空…...

每日一题洛谷P5721 【深基4.例6】数字直角三角形c++
#include<iostream> using namespace std; int main() {int n;cin >> n;int t 1;for (int i 0; i < n; i) {for (int j 0; j < n - i; j) {printf("%02d",t);t;}cout << endl;}return 0; }...

计算机网络笔记再战——理解几个经典的协议1
目录 前言 从协议是什么出发 关于TCP/IP协议体系 几个传输方式的分类 地址 网卡 中继器(Repeater) 网桥(Bridge) 路由器(Router) 网关 前言 笔者最近正在整理(笔者开的坑不少…...

ElasticSearch学习笔记-解析JSON格式的内容
如果需要屏蔽其他项目对Elasticsearch的直接访问操作,统一由一个入口访问操作Elasticsearch,可以考虑直接传入JSON格式语句解析执行。 相关依赖包 <properties><elasticsearch.version>7.9.3</elasticsearch.version><elasticsea…...
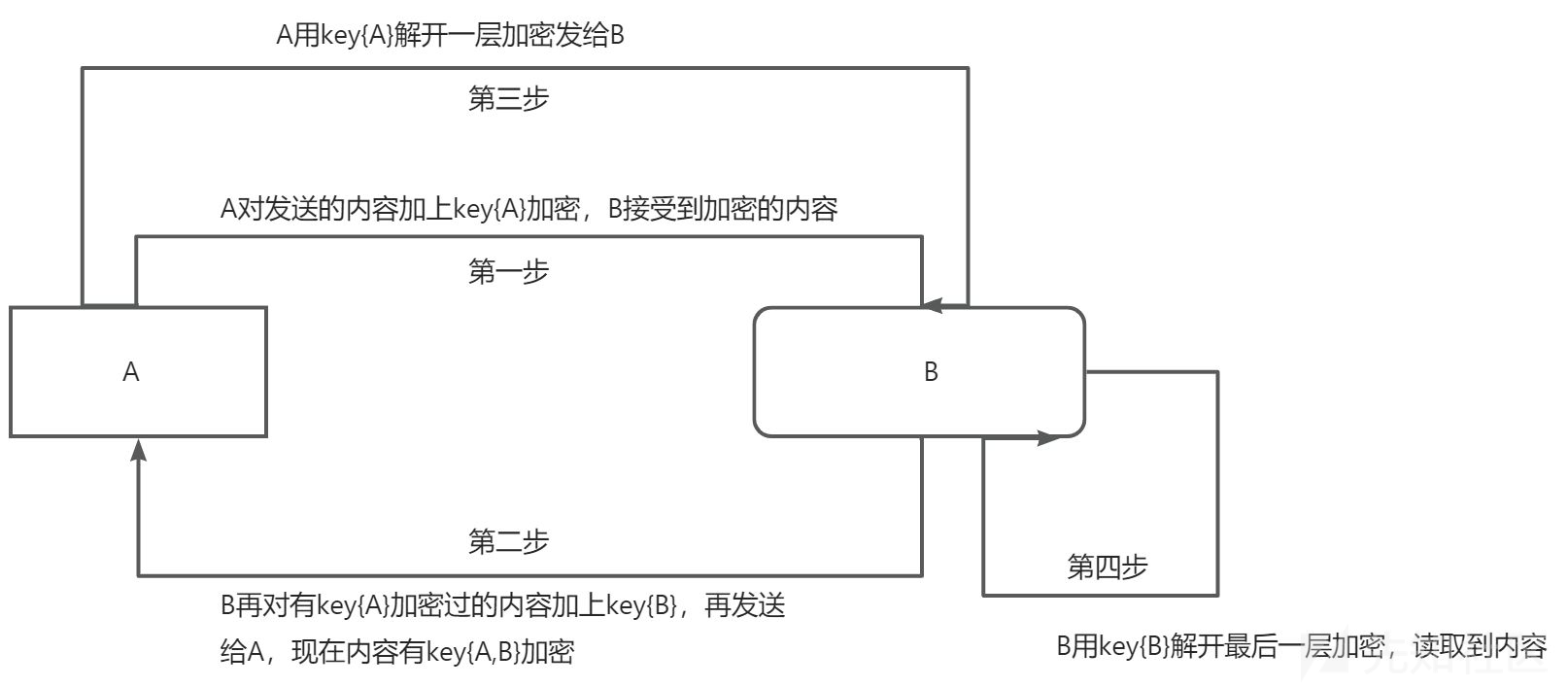
浅谈密码相关原理及代码实现
本代码仅供学习、研究、教育或合法用途。开发者明确声明其无意将该代码用于任何违法、犯罪或违反道德规范的行为。任何个人或组织在使用本代码时,需自行确保其行为符合所在国家或地区的法律法规。 开发者对任何因直接或间接使用该代码而导致的法律责任、经济损失或…...
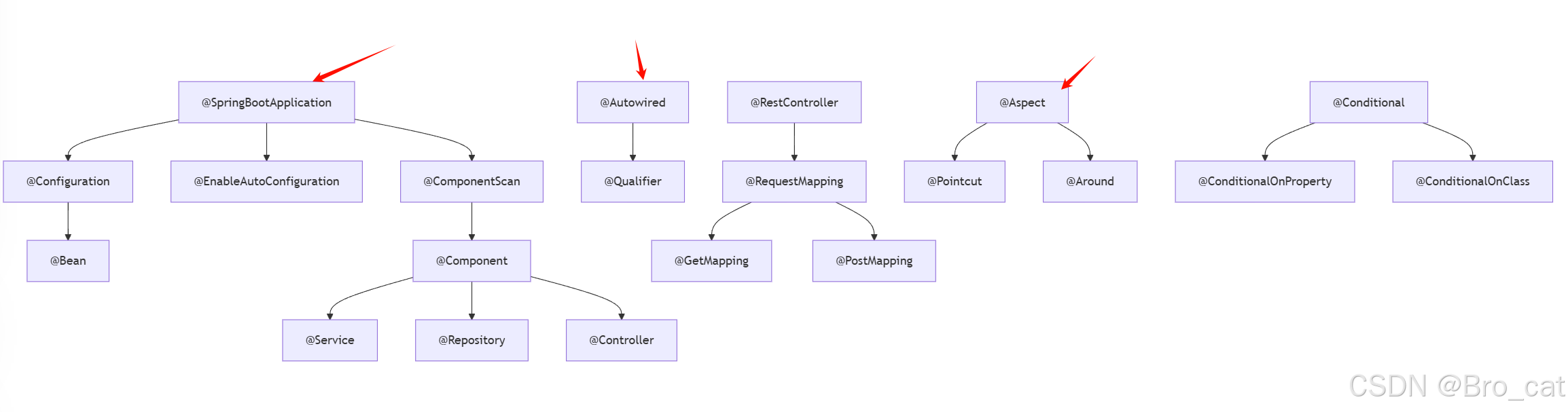
Spring Boot常用注解深度解析:从入门到精通
今天,这篇文章带你将深入理解Spring Boot中30常用注解,通过代码示例和关系图,帮助你彻底掌握Spring核心注解的使用场景和内在联系。 一、启动类与核心注解 1.1 SpringBootApplication 组合注解: SpringBootApplication Confi…...
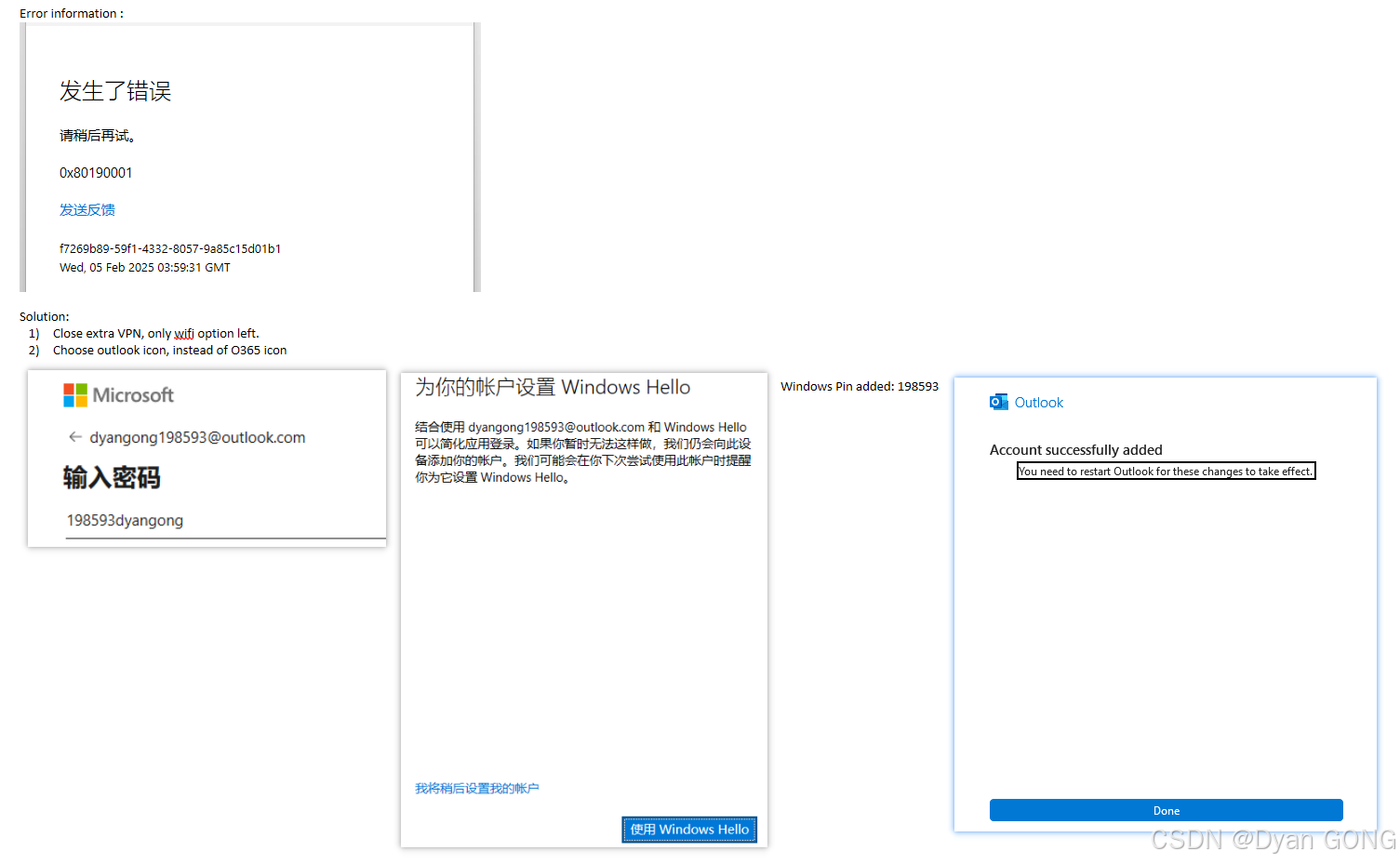
can not add outlook new accounts on the outlook
link : Reference url...
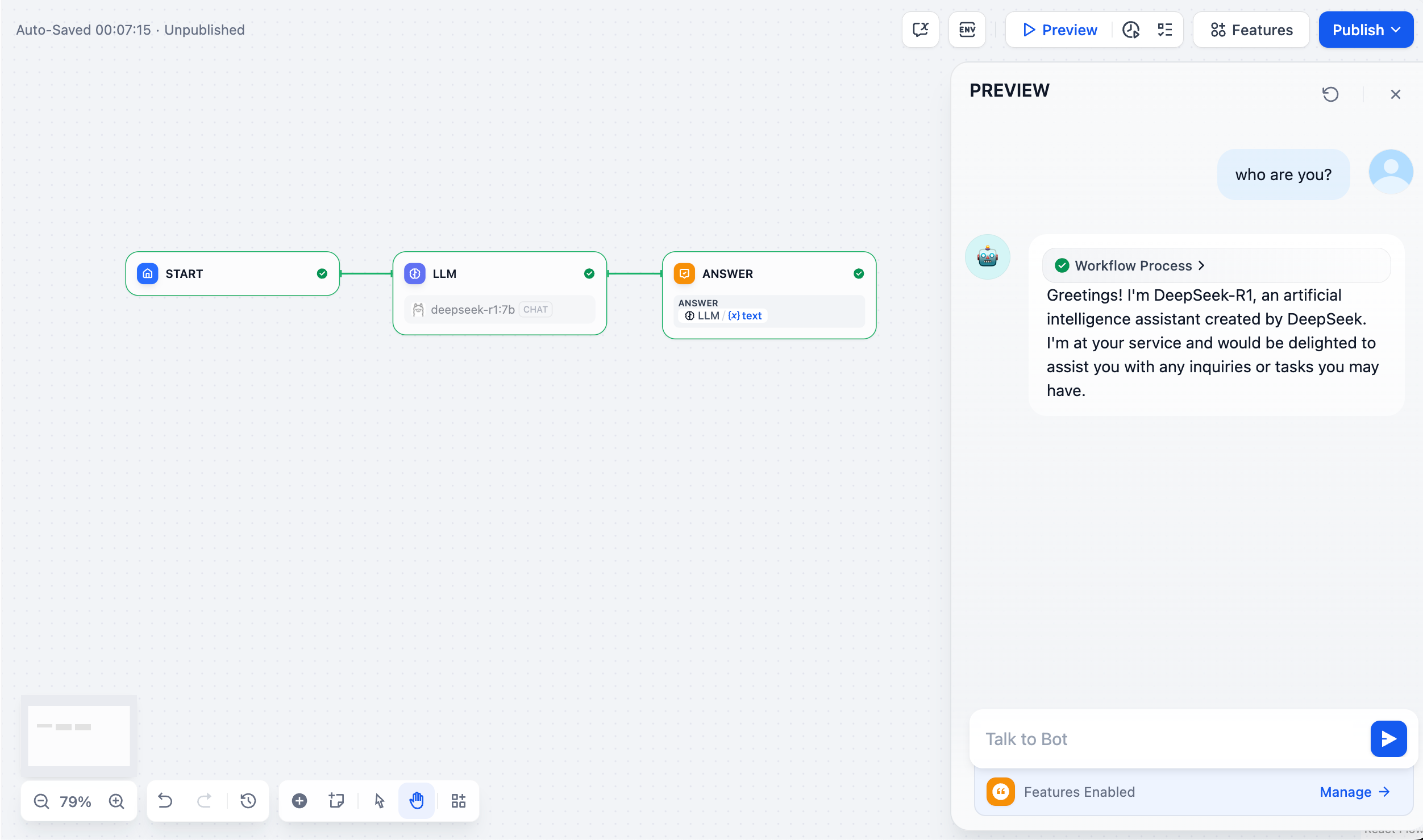
私有化部署 DeepSeek + Dify,构建你的专属私人 AI 助手
私有化部署 DeepSeek Dify,构建你的专属私人 AI 助手 概述 DeepSeek 是一款开创性的开源大语言模型,凭借其先进的算法架构和反思链能力,为 AI 对话交互带来了革新性的体验。通过私有化部署,你可以充分掌控数据安全和使用安全。…...

【Elasticsearch】post_filter
post_filter是 Elasticsearch 中的一种后置过滤机制,用于在查询执行完成后对结果进行过滤。以下是关于post_filter的详细介绍: 工作原理 • 查询后过滤:post_filter在查询执行完毕后对返回的文档集进行过滤。这意味着所有与查询匹配的文档都…...

验证工具:GVIM和VIM
一、定义与关系 gVim:gVim是Vim的图形界面版本,提供了更多的图形化功能,如菜单栏、工具栏和鼠标支持。它使得Vim的使用更加直观和方便,尤其对于不习惯命令行界面的用户来说。Vim:Vim是一个在命令行界面下运行的文本编…...
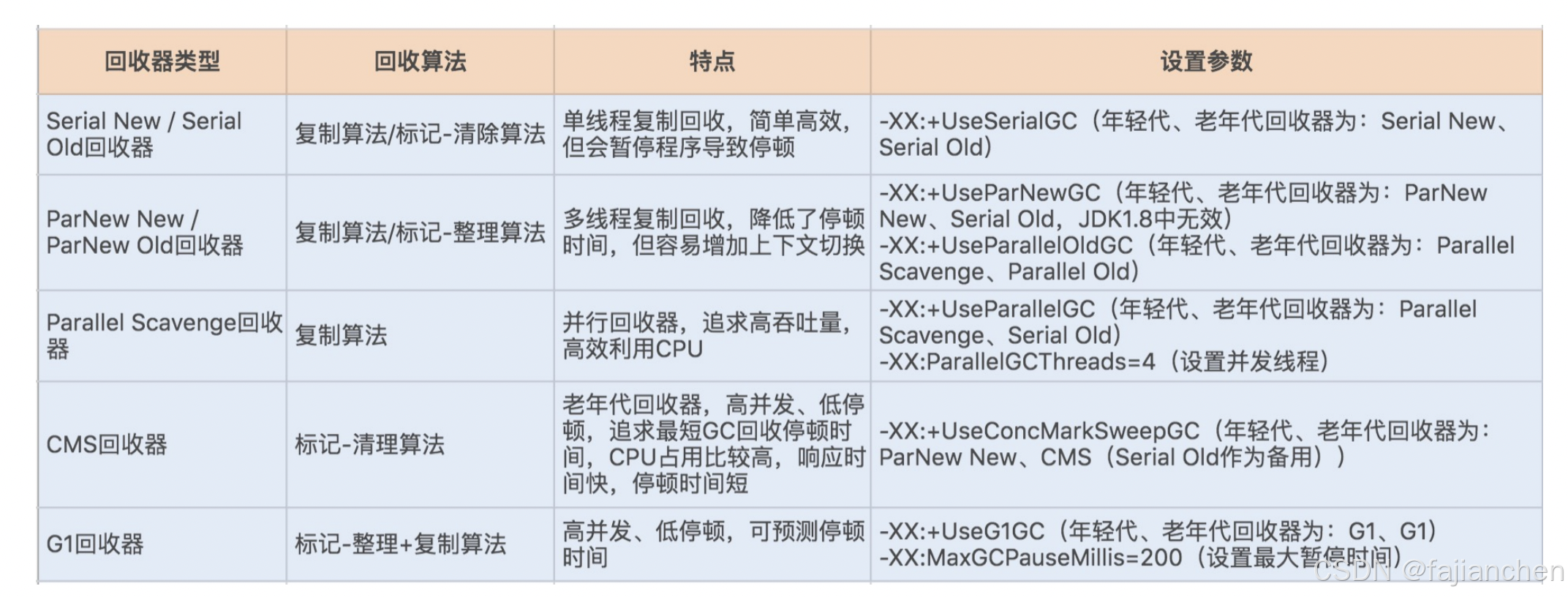
如何优化垃圾回收机制?
垃圾回收机制 掌握 GC 算法之前,我们需要先弄清楚 3 个问题。第一,回收发生在哪里?第二,对象在 什么时候可以被回收?第三,如何回收这些对象? 回收发生在哪里? JVM 的内存区域中&…...

beyond the ‘PHYSICAL‘ memory limit.问题处理
Container [pid5616,containerIDcontainer_e50_1734408743176_3027740_01_000006] is running 507887616B beyond the ‘PHYSICAL’ memory limit. Current usage: 4.5 GB of 4 GB physical memory used; 6.6 GB of 8.4 GB virtual memory used. Killing container. 1.增大map…...

Day36【AI思考】-表达式知识体系总览
文章目录 **表达式知识体系总览**回答1:**表达式知识体系****一、三种表达式形式对比****二、表达式转换核心方法****1. 中缀转后缀(重点)****2. 中缀转前缀** **三、表达式计算方法****1. 后缀表达式计算(栈实现)****…...
调试)
段错误(Segmentation Fault)调试
1. 使用 GDB(GNU Debugger) GDB 是一个强大的调试工具,可以帮助你逐步执行程序并检查变量状态。 编译时添加调试信息: gcc -g your_program.c -o your_program启动 GDB: gdb ./your_program运行程序: …...

告别手改脚本!用CANoe Panel面板做个变量控制台,测试效率翻倍
告别手改脚本!用CANoe Panel面板打造智能变量控制台 在车载网络测试领域,效率提升往往隐藏在那些被忽视的日常操作细节中。当测试工程师频繁打开CAPL脚本修改超时阈值、调整诊断ID或切换测试模式时,不仅打断了工作流,更在团队协作…...

AI智能体生态的包管理器:agenticmarket-cli 设计与实践
1. 项目概述:一个面向AI智能体生态的命令行工具如果你和我一样,长期在AI智能体(Agent)这个领域里折腾,那你肯定经历过这样的场景:为了测试一个最新的开源智能体框架,你需要先找到它的GitHub仓库…...

如何快速免费管理游戏DLSS版本?DLSS Swapper终极指南
如何快速免费管理游戏DLSS版本?DLSS Swapper终极指南 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper DLSS Swapper是一款革命性的开源工具,专为PC游戏玩家设计,能够智能管理、下载和…...

XHS-Downloader:小红书内容采集与管理的全栈解决方案
XHS-Downloader:小红书内容采集与管理的全栈解决方案 【免费下载链接】XHS-Downloader 小红书(XiaoHongShu、RedNote)链接提取/作品采集工具:提取账号发布、收藏、点赞、专辑作品链接;提取搜索结果作品、用户链接&…...

MCP服务器开发指南:为AI助手构建安全可控的外部工具扩展
1. 项目概述:一个为AI助手赋能的MCP服务器最近在折腾AI应用开发的朋友,可能都绕不开一个词:MCP。全称是Model Context Protocol,你可以把它理解成一套标准化的“插件协议”。它让像Claude、Cursor这类AI助手,能够安全、…...

构建通用Docker工具镜像:从设计到实践的全流程指南
1. 项目概述:一个“反重力”的Docker镜像?看到这个镜像名runzhliu/docker-antigravity,很多人的第一反应可能是好奇和疑惑。在Docker Hub上,以“antigravity”(反重力)命名的镜像并不常见,它不像…...

Pandrator:基于Python的自动化内容生成与数据转换工具实践
1. 项目概述与核心价值最近在折腾一些自动化数据处理和内容生成的工作流,发现了一个挺有意思的开源项目,叫Pandrator。乍一看这个名字,可能会联想到“潘多拉”和“生成器”的结合,实际上它也确实是一个功能强大的内容转换与生成工…...

火灾动力学模拟实战:如何用FDS构建精准的火灾预测系统
火灾动力学模拟实战:如何用FDS构建精准的火灾预测系统 【免费下载链接】fds Fire Dynamics Simulator 项目地址: https://gitcode.com/gh_mirrors/fd/fds 你是否曾面临这样的困境:当设计一栋大型商业建筑时,如何科学评估火灾时的人员疏…...

Nixtla时间序列预测库实战:从统计模型到深度学习的一站式解决方案
1. 项目概述:时间序列预测的“瑞士军刀”如果你正在处理销售预测、服务器负载监控或者任何与时间相关的数据预测问题,并且厌倦了在复杂的模型库和繁琐的预处理步骤之间反复横跳,那么 Nixtla 这个开源项目很可能就是你一直在找的“瑞士军刀”。…...

Linux权限继承与umask配置实践
Linux权限继承与umask配置实践很多协作目录问题并不是因为当前权限错了,而是因为新建文件的默认权限总是不符合预期。背后的核心变量之一就是 umask。中级阶段如果不理解默认权限是怎么生成的,就会陷入“每次都手工 chmod”的低效循环。一、默认权限不是…...