部署夜景增强模型Learning to See in the Dark以及gradio UI编程方法
前面我们已经把Learning to See in the Dark的paper和原理进行了解读,现在把Learning to See in the Dark(后续简称SID模型)部署看一下效果。
这篇文章选择的部署方式是gradio + 本地pytorch直接推理。先看一下效果:
对单个文件进行夜景增强:
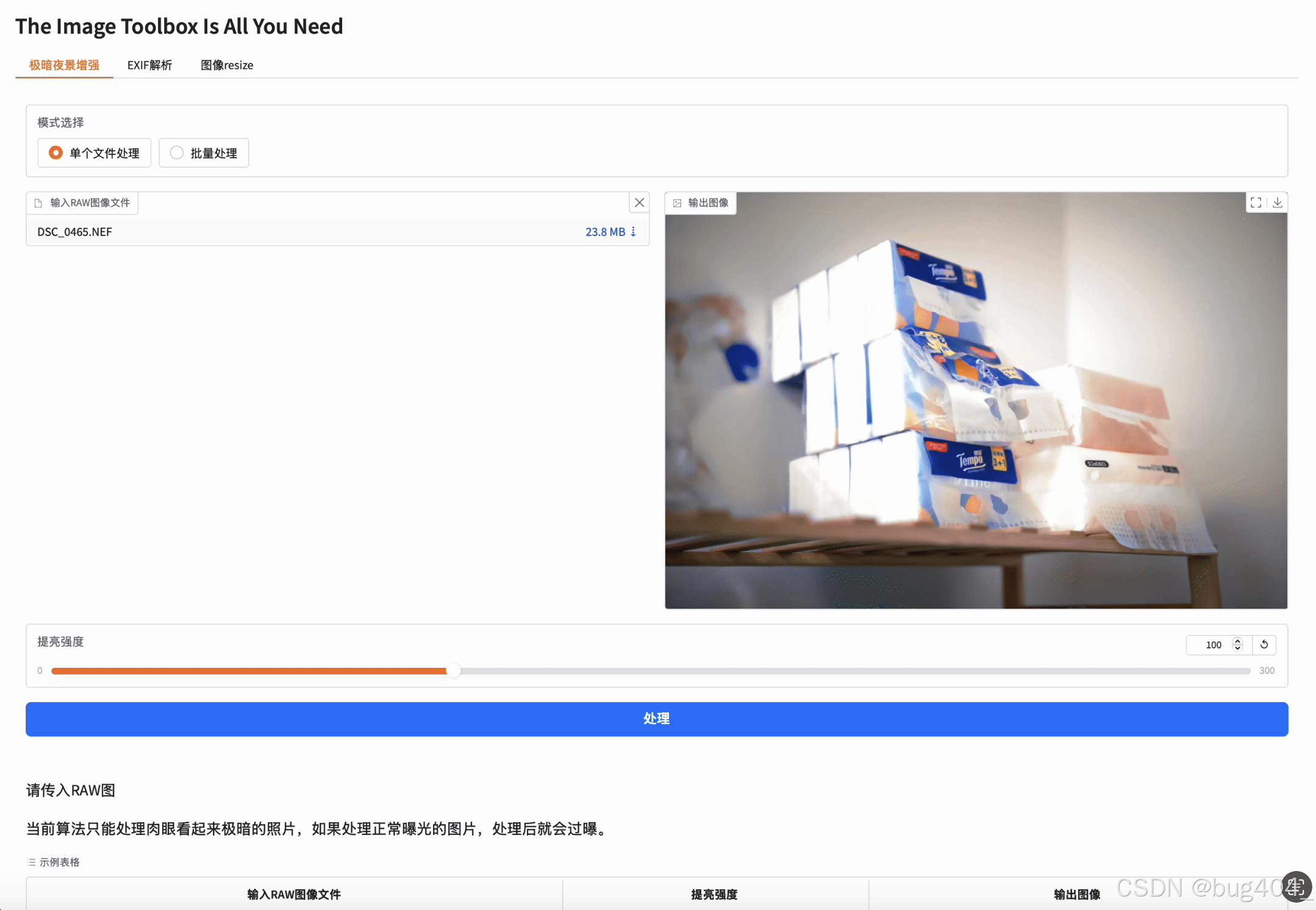
例如下面这张基本全黑的原图,经过超级夜景增强功能后,出图就是正常的观感。
| 原图 | 增强后 |
|---|---|
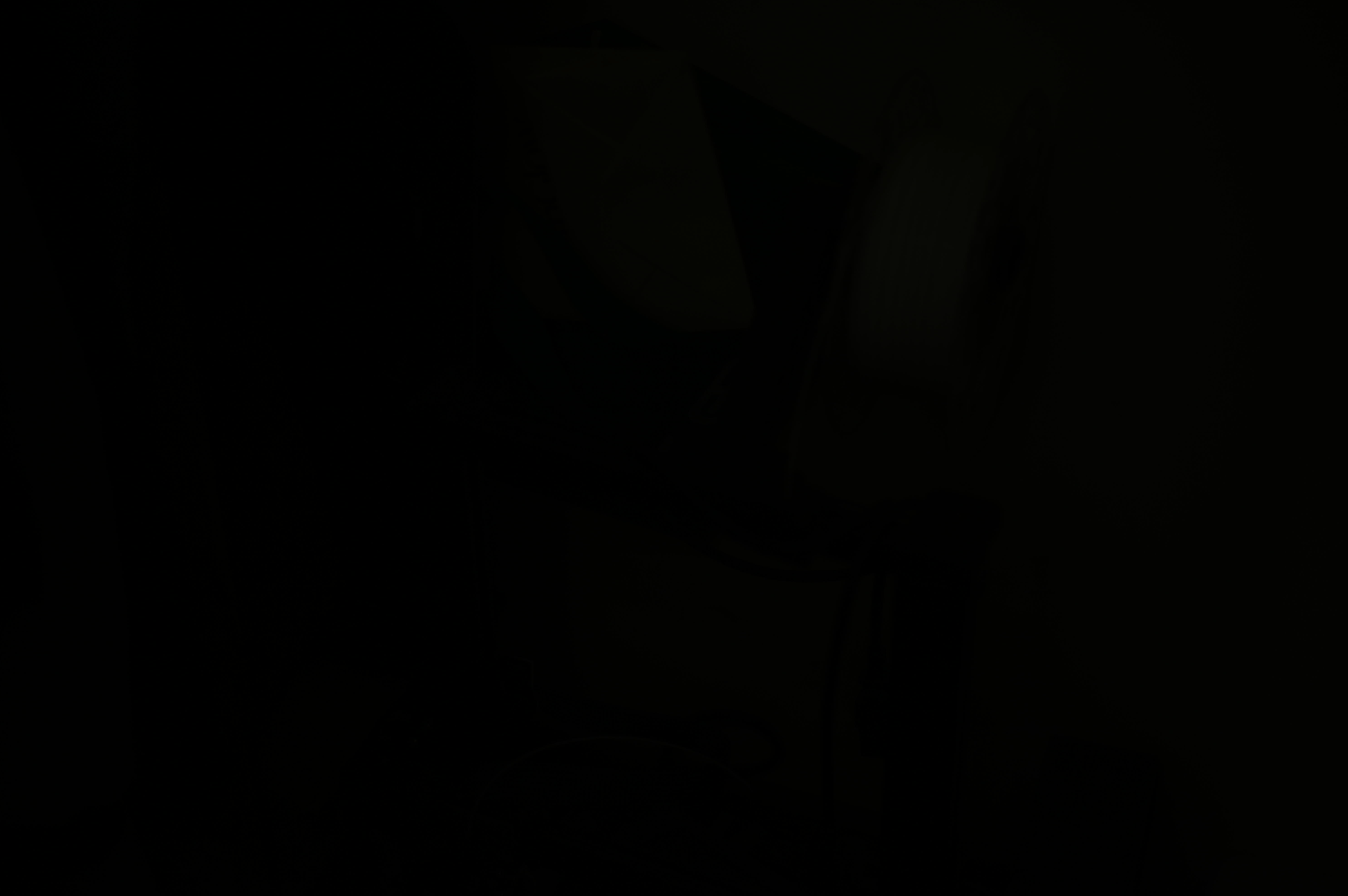 |  |
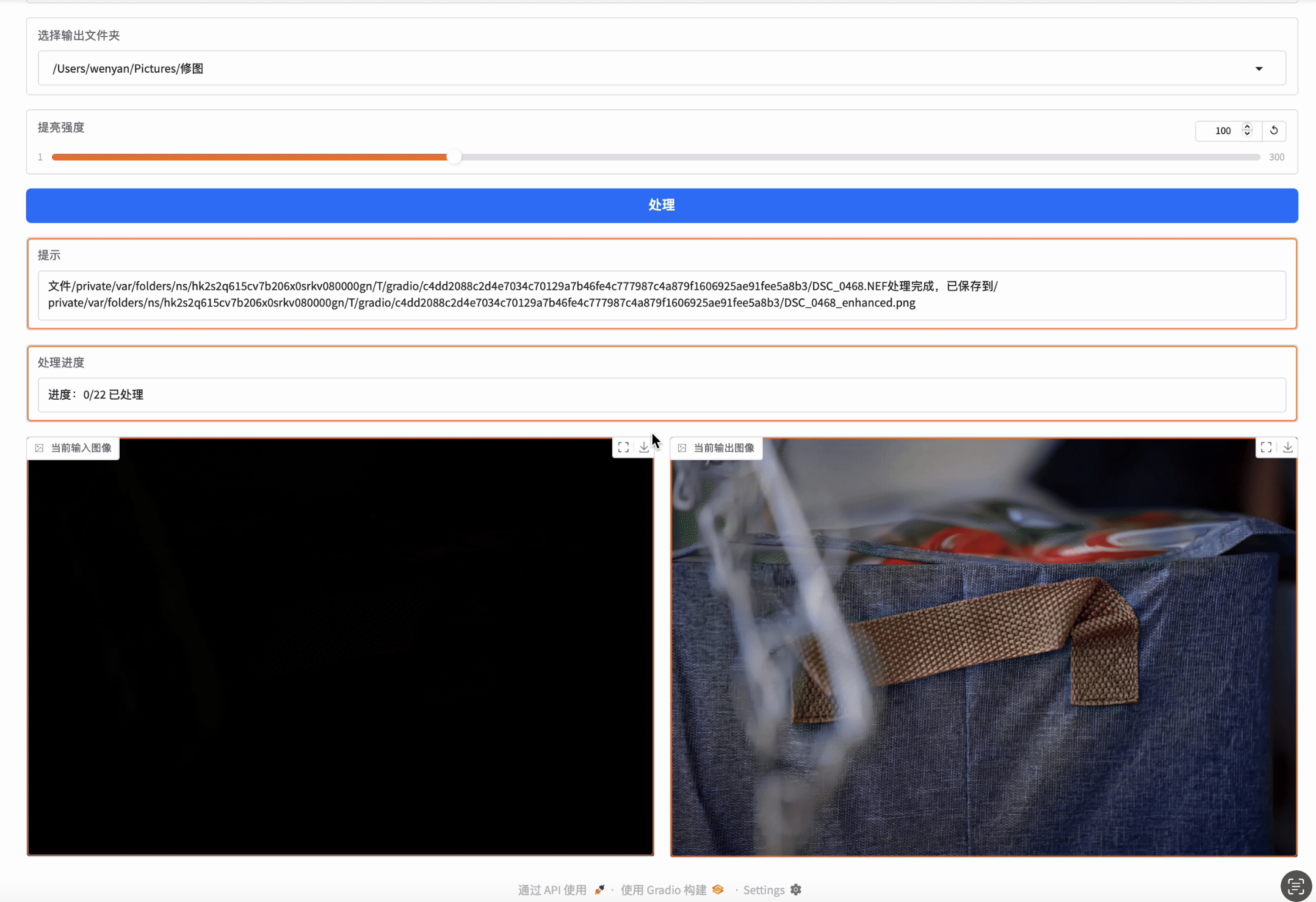
对一个文件夹内的多个文件批量进行增强:
对于多文件的批量处理,用户可以上传文件夹中的图片,然后批量自动处理,在处理过程中,可以看到当前正在处理的信息和进度,也可以看到原图和处理后的对比图。
当前的部署提供了优美易用的UI界面,而且夜景增强效果很不错。整个项目可从链接image_toolbox查看。
一、sid的网络结构
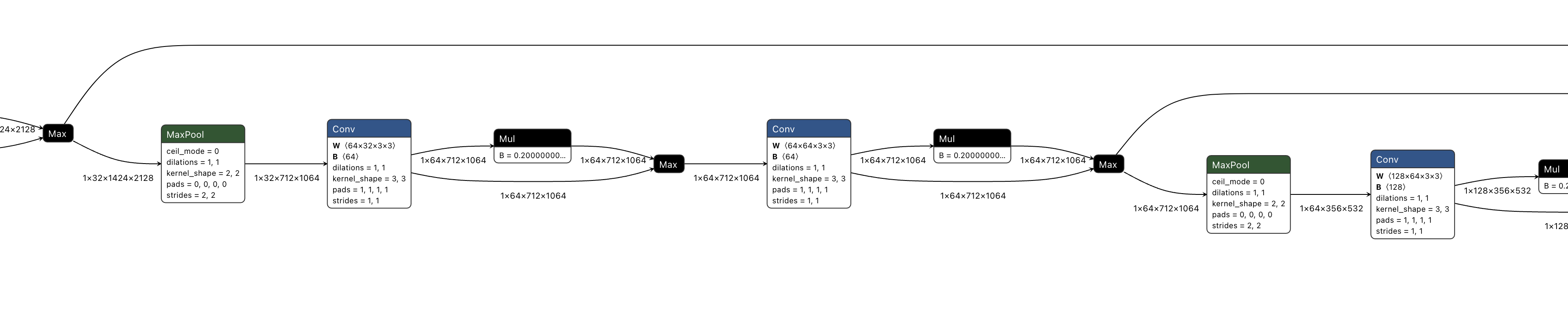
SeeInDark 的结构类似 U-Net,适用于低光照图像增强任务。它采用了 编码-解码(Encoder-Decoder)架构,通过 卷积层(Conv)+ 下采样(Pooling)+ 反卷积(UpConv)+ 像素重排(Pixel Shuffle) 来实现高质量的图像增强。
该网络可分为三个部分:
- 编码(Encoder):用于特征提取
通过 多个 3×3 卷积 + Leaky ReLU(LReLU)+ 最大池化(MaxPool) 提取图像的层次化特征。
采用 4 层池化,逐步降低分辨率,同时增加通道数,获取更丰富的语义信息。 - 解码(Decoder):用于恢复高分辨率信息
采用 转置卷积(ConvTranspose2d)+ 跳跃连接(Skip Connection)+ 卷积 逐步恢复高分辨率特征。
通过 跳跃连接(skip connection) 结合低层细节信息,增强重建能力,避免信息丢失。 - 像素重排(Pixel Shuffle):提升分辨率
在输出层 使用 Pixel Shuffle,将通道信息转换为空间信息,实现 超分辨率增强,提升最终图像的清晰度。
class SeeInDark(nn.Module):def __init__(self, num_classes=10):super(SeeInDark, self).__init__()self.conv1_1 = nn.Conv2d(4, 32, kernel_size=3, stride=1, padding=1)self.conv1_2 = nn.Conv2d(32, 32, kernel_size=3, stride=1, padding=1)self.pool1 = nn.MaxPool2d(kernel_size=2)self.conv2_1 = nn.Conv2d(32, 64, kernel_size=3, stride=1, padding=1)self.conv2_2 = nn.Conv2d(64, 64, kernel_size=3, stride=1, padding=1)self.pool2 = nn.MaxPool2d(kernel_size=2)self.conv3_1 = nn.Conv2d(64, 128, kernel_size=3, stride=1, padding=1)self.conv3_2 = nn.Conv2d(128, 128, kernel_size=3, stride=1, padding=1)self.pool3 = nn.MaxPool2d(kernel_size=2)self.conv4_1 = nn.Conv2d(128, 256, kernel_size=3, stride=1, padding=1)self.conv4_2 = nn.Conv2d(256, 256, kernel_size=3, stride=1, padding=1)self.pool4 = nn.MaxPool2d(kernel_size=2)self.conv5_1 = nn.Conv2d(256, 512, kernel_size=3, stride=1, padding=1)self.conv5_2 = nn.Conv2d(512, 512, kernel_size=3, stride=1, padding=1)self.upv6 = nn.ConvTranspose2d(512, 256, 2, stride=2)self.conv6_1 = nn.Conv2d(512, 256, kernel_size=3, stride=1, padding=1)self.conv6_2 = nn.Conv2d(256, 256, kernel_size=3, stride=1, padding=1)self.upv7 = nn.ConvTranspose2d(256, 128, 2, stride=2)self.conv7_1 = nn.Conv2d(256, 128, kernel_size=3, stride=1, padding=1)self.conv7_2 = nn.Conv2d(128, 128, kernel_size=3, stride=1, padding=1)self.upv8 = nn.ConvTranspose2d(128, 64, 2, stride=2)self.conv8_1 = nn.Conv2d(128, 64, kernel_size=3, stride=1, padding=1)self.conv8_2 = nn.Conv2d(64, 64, kernel_size=3, stride=1, padding=1)self.upv9 = nn.ConvTranspose2d(64, 32, 2, stride=2)self.conv9_1 = nn.Conv2d(64, 32, kernel_size=3, stride=1, padding=1)self.conv9_2 = nn.Conv2d(32, 32, kernel_size=3, stride=1, padding=1)self.conv10_1 = nn.Conv2d(32, 12, kernel_size=1, stride=1)def forward(self, x):conv1 = self.lrelu(self.conv1_1(x))conv1 = self.lrelu(self.conv1_2(conv1))pool1 = self.pool1(conv1)conv2 = self.lrelu(self.conv2_1(pool1))conv2 = self.lrelu(self.conv2_2(conv2))pool2 = self.pool1(conv2)conv3 = self.lrelu(self.conv3_1(pool2))conv3 = self.lrelu(self.conv3_2(conv3))pool3 = self.pool1(conv3)conv4 = self.lrelu(self.conv4_1(pool3))conv4 = self.lrelu(self.conv4_2(conv4))pool4 = self.pool1(conv4)conv5 = self.lrelu(self.conv5_1(pool4))conv5 = self.lrelu(self.conv5_2(conv5))up6 = self.upv6(conv5)up6 = torch.cat([up6, conv4], 1)conv6 = self.lrelu(self.conv6_1(up6))conv6 = self.lrelu(self.conv6_2(conv6))up7 = self.upv7(conv6)up7 = torch.cat([up7, conv3], 1)conv7 = self.lrelu(self.conv7_1(up7))conv7 = self.lrelu(self.conv7_2(conv7))up8 = self.upv8(conv7)up8 = torch.cat([up8, conv2], 1)conv8 = self.lrelu(self.conv8_1(up8))conv8 = self.lrelu(self.conv8_2(conv8))up9 = self.upv9(conv8)up9 = torch.cat([up9, conv1], 1)conv9 = self.lrelu(self.conv9_1(up9))conv9 = self.lrelu(self.conv9_2(conv9))conv10= self.conv10_1(conv9)out = nn.functional.pixel_shuffle(conv10, 2)return outdef _initialize_weights(self):for m in self.modules():if isinstance(m, nn.Conv2d):m.weight.data.normal_(0.0, 0.02)if m.bias is not None:m.bias.data.normal_(0.0, 0.02)if isinstance(m, nn.ConvTranspose2d):m.weight.data.normal_(0.0, 0.02)def lrelu(self, x):outt = torch.max(0.2*x, x)return outt
sid的网络结构相对比较简单,是一个UNet结构的网络。
网络是一个4通道的输入,在网络的开头,通过使用kernel size=3, pad=1, stride=1的conv,来保持了特征图尺寸不变。4通道的输入来自于将raw图的rggb进行了拆分,拆分到了4通道。
def pack_raw(raw,white_level,black_level):#pack Bayer image to 4 channelsim = np.maximum(raw - black_level,0)/ (white_level - black_level) #subtract the black levelim = np.expand_dims(im,axis=2) img_shape = im.shapeH = img_shape[0]W = img_shape[1]out = np.concatenate((im[0:H:2,0:W:2,:], im[0:H:2,1:W:2,:],im[1:H:2,1:W:2,:],im[1:H:2,0:W:2,:]), axis=2)#print(f'pack_raw,{out.shape = }')return out
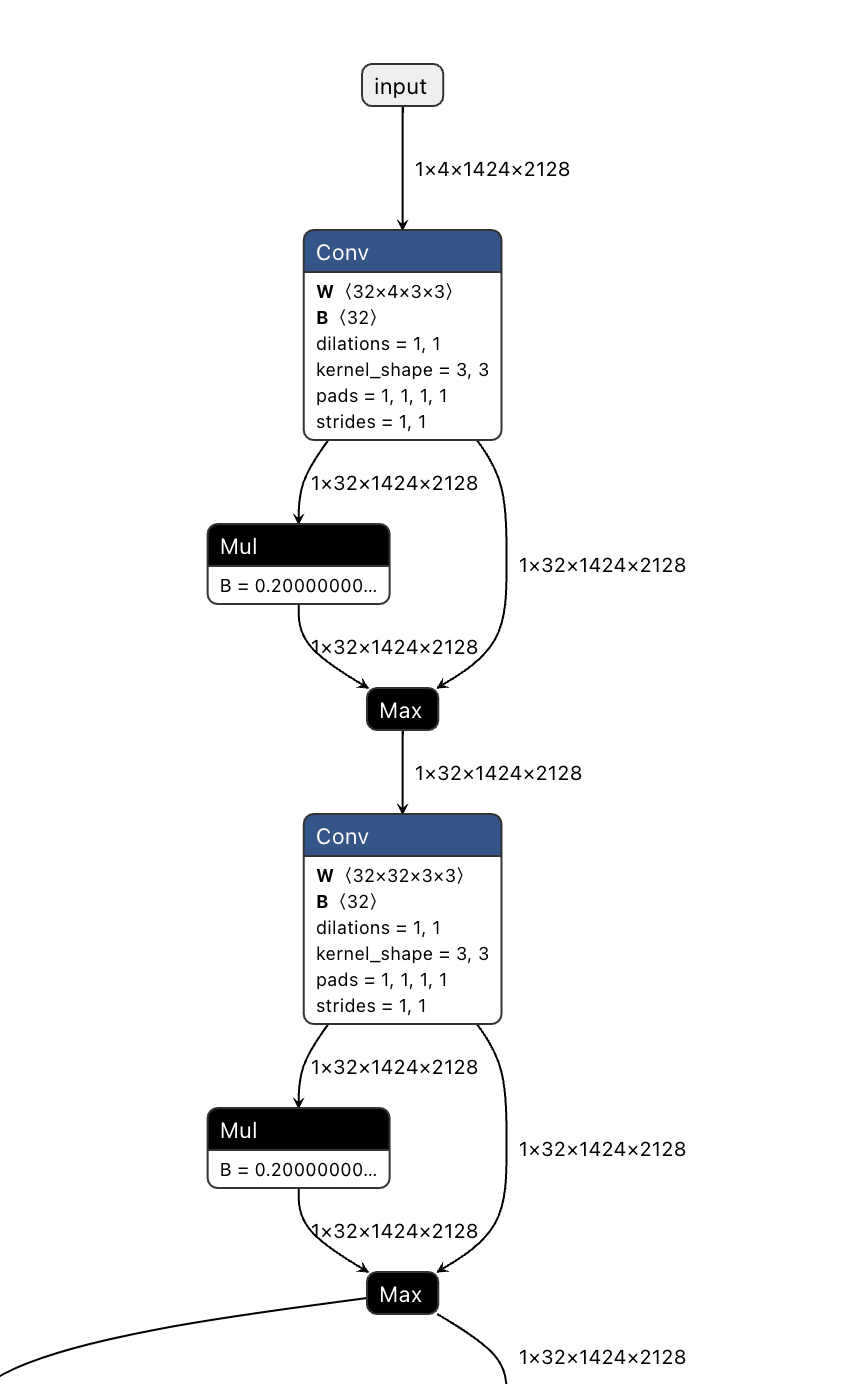
在编码部分,通过多个maxpool+conv+conv的block,实现了特征图的降采样。
在解码部分,通过多个conv+conv+ConvTranspose的block,实现了特征图的上采样。
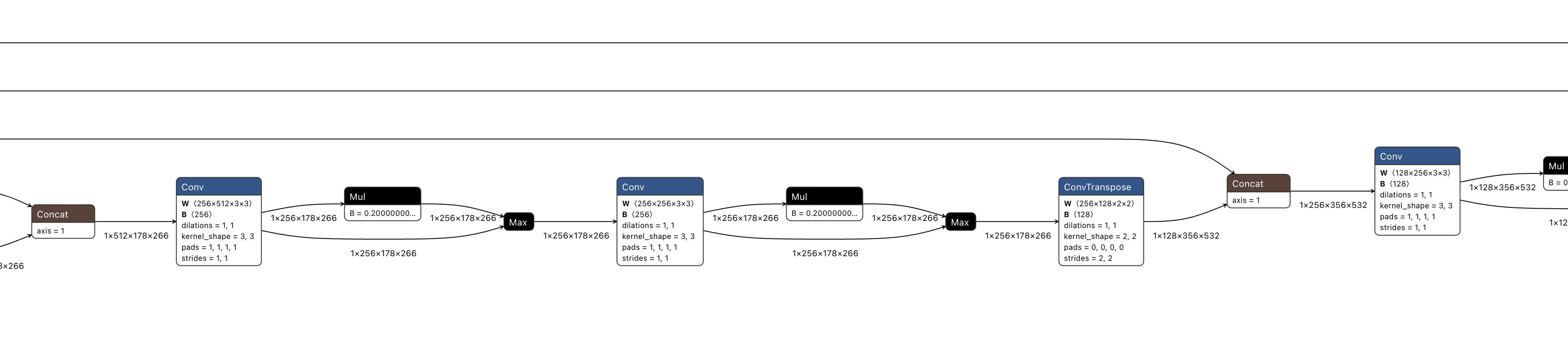
最后,还是通过使用kernel size=3, pad=1, stride=1的conv以及kernel=1,pad=0,stride=1的conv,来保持特征图尺寸一致。最后通过一个nn.pixel_shuffle(Depth2Space)得到最终的RGB出图。

sid网络结构的几个问题
1. 对于图像恢复的,为什么可以用MaxPool?
在 SeeInDark 这个网络中,MaxPool2d(最大池化) 的使用是合理的,主要原因如下:
1. 最大池化的作用
最大池化(MaxPool2d) 主要用于:
- 降低特征图的分辨率(减小计算量)。
- 增加感受野,捕捉更大范围的特征。
- 增强特征的稳健性(减少对微小噪声的敏感性)。
2. 为什么可以用 MaxPool?
(1) 最大池化不会丢失关键信息
在 低光增强任务 中,网络的目标是从 低光噪声图像 中提取关键特征,而不是单纯地保留所有像素细节。
最大池化有助于去除 细微噪声,保留主要 亮度信息 和 轮廓信息。
- 例如:
- 卷积层(Conv)提取特征 → 最大池化(MaxPool)去除不必要的细节。
- 这样可以使网络关注 大尺度的光照模式,而非噪声干扰。
(2) 最大池化能提高网络的感受野
感受野(Receptive Field) 指的是 网络每个神经元能够看到的输入区域。
在低光增强任务中:
- 局部像素值通常 变化较大(由于噪声)。
- 但 大区域的亮度模式(如光源位置、物体边界)较稳定。
最大池化可以:
- 扩大感受野,让网络关注更大区域的图像信息。
- 减少计算复杂度,降低显存需求,提高训练效率。
(3) U-Net 结构+跳跃连接弥补池化的缺点
一个问题是,最大池化可能导致细节信息的损失。然而,该网络采用了 U-Net 结构,具有 跳跃连接(Skip Connection):
- 在解码部分,低层特征直接连接到高层,保留了 局部细节。
- 这样,最大池化的 全局特征提取 能力可以与跳跃连接的 局部信息恢复 结合,既减少噪声,又不丢失关键信息。
(4) 对比平均池化(AvgPool)
另一种池化方法是 平均池化(AvgPool),计算局部区域的均值,而非最大值。
| MaxPool | AvgPool | |
|---|---|---|
| 计算方式 | 取最大值 | 计算均值 |
| 适用于 | 纹理、边缘检测 | 平滑、模糊 |
| 效果 | 选择最显著特征 | 可能丢失对比度 |
在 低光增强任务 中,图像通常很暗,关键细节(如亮部区域)相对稀少。MaxPool 更适合提取关键亮部特征,而不会导致模糊化。
3. 结论
在 SeeInDark 这种低光增强网络中,使用 MaxPool2d 是合理的,主要原因是:
- 去除噪声,提高稳健性(避免对细微噪声过度敏感)。
- 扩大感受野(让网络关注大范围的亮度信息)。
- 减少计算量,提高训练效率。
- 跳跃连接弥补了最大池化的信息损失,能在解码阶段恢复细节。
因此,最大池化在这个任务中能有效帮助提取关键的亮度和边缘信息,是合理的设计选择。
2. 最后采用nn.PixelShuffle来实现分辨率增强,相比使用ConvTranspose或者其他方式,有什么优点?
在 SeeInDark 网络的最后一层使用了 nn.PixelShuffle 进行 分辨率增强(Super-Resolution),这是一个 合理且高效 的设计选择。相比于 转置卷积(ConvTranspose2d) 或 插值(Interpolation),PixelShuffle 具有以下几个显著的优点:
1. 什么是 PixelShuffle?
nn.PixelShuffle(upscale_factor=2) 作用是:
- 输入通道数 = (目标通道数 × upscale_factor²)
- 通道信息转换为空间信息,从而 提高分辨率。
举例:
- 输入:12 通道(C=12)× H × W
- 输出:3 通道(C=3)× 2H × 2W(RGB 三通道图像)
计算方式:
- 12 通道的输入被重新排列为
3 × (2×2) = 12个像素块。 - 这个重排操作直接映射到更高分辨率的图像,而不需要额外计算。
2. 为什么 PixelShuffle 更适合这个任务?
(1) 避免了 Checkerboard Artifacts(棋盘格伪影)
相比 转置卷积(ConvTranspose2d),PixelShuffle 不会产生棋盘格伪影(checkerboard artifacts)。
棋盘格伪影的来源
- 转置卷积(ConvTranspose2d) 由于 跨步(stride)和填充(padding),可能会导致像素值在上采样时分布不均匀,形成棋盘格伪影。
- PixelShuffle 仅重新排列像素,不引入额外计算,避免了这一问题。
💡 结论:PixelShuffle 天然平滑,没有伪影,适用于 低光增强 这种对图像质量要求高的任务。
(2) 更高效的计算
PixelShuffle 主要是张量重排(rearrange operation),相比 转置卷积(ConvTranspose2d) 和 双线性插值(Bilinear Interpolation),计算量更小:
- ConvTranspose2d 需要 额外的卷积计算。
- 插值(Bilinear 或 Bicubic) 需要 插值计算。
- PixelShuffle 只是 reshape + permute,计算复杂度低,速度快。
💡 结论:PixelShuffle 速度更快,计算量更低,更节省显存。
(3) 更好地保留细节
低光增强任务需要 增强高频信息(如纹理、边缘),PixelShuffle 比双线性插值更能保留细节:
- Bilinear/Bicubic Interpolation:对整个图像进行插值,会导致高频细节丢失,图像变模糊。
- PixelShuffle:直接从网络的特征通道中 提取和重排高分辨率信息,不会引入模糊。
💡 结论:PixelShuffle 在保持高频细节方面比插值方法更优。
(4) 适用于超分辨率任务
PixelShuffle 最早用于 超分辨率重建(Super-Resolution, SR),例如:
- EDSR(Enhanced Deep SR)
- SRResNet
- ESRGAN(SR-GAN)
SeeInDark 需要 提升图像亮度,同时增强细节,使用 PixelShuffle 可以 在放大分辨率的同时恢复图像质量。
💡 结论:PixelShuffle 更适合图像增强和超分辨率任务,比普通的 ConvTranspose2d 更能保留 精细纹理。
3. PixelShuffle vs ConvTranspose2d vs Interpolation 对比
| 方法 | 计算量 | 细节保持 | 伪影风险 | 适用场景 |
|---|---|---|---|---|
| PixelShuffle | ✅ 低 | ✅ 高(清晰) | ✅ 无棋盘格 | 超分辨率、去噪、低光增强 |
| ConvTranspose2d | ❌ 高 | 🔶 可能丢失 | ❌ 高(棋盘格) | 生成对抗网络(GAN)、分割任务 |
| Bilinear Interpolation | ✅ 低 | ❌ 细节丢失 | ✅ 无 | 一般性放大(如 CNN 最后层) |
4. 结论
SeeInDark 采用 PixelShuffle 进行分辨率增强是一个 优雅的设计,相比 ConvTranspose2d 或插值方法,它的主要优势是:
- 避免棋盘格伪影(比
ConvTranspose2d更稳定)。 - 计算量更低,更快(仅需 reshape 操作)。
- 更好地保留细节(比双线性插值更清晰)。
- 超分辨率任务的标准做法(更适合低光增强任务)。
综上,PixelShuffle 在 SeeInDark 网络中的使用是一个聪明的选择,在保持高质量输出的同时,确保了计算效率和稳定性。 🚀
二、使用gradio创建UI的方法
我们以展示的UI代码为例展开说明:
class GradioUI:def __init__(self, image_processor):self.image_processor = image_processorself.demo = self.create_ui()def create_ui(self):with gr.Blocks() as demo:gr.Markdown("# The Image Toolbox Is All You Need")demo.css = """#batch-process-button {background-color: #007AFF;color: white;}"""with gr.Tabs() as tabs:self.create_night_enhance_tab()self.create_exif_parser_tab()self.create_image_resize_tab()return demodef create_night_enhance_tab(self):with gr.TabItem("极暗夜景增强", id="night_enhance"):mode = gr.Radio(["单个文件处理", "批量处理"], label="模式选择", value="单个文件处理")single_file_row, batch_file_row = self.create_single_file_ui(), self.create_batch_file_ui()mode.change(self.update_ui_mode, inputs=[mode], outputs=[single_file_row, batch_file_row])def create_single_file_ui(self):with gr.Row(visible=True) as single_file_row:with gr.Column():with gr.Row():input_image = gr.File(label="输入RAW图像文件")output_image = gr.Image(label="输出图像")with gr.Row():ratio_single_bar = gr.Slider(label="提亮强度", minimum=0, maximum=300, value=100, step=10)with gr.Row():process_button_single = gr.Button("处理", elem_id="batch-process-button")with gr.Row():error_message_box = gr.Textbox(label="错误提示", value="", visible=False, interactive=False)with gr.Row():gr.Markdown("""<span style='font-size: 18px;'></span> \n<span style='font-size: 18px;'>请传入RAW图</span> \n<span style='font-size: 18px;'>当前算法只能处理肉眼看起来极暗的照片,如果处理正常曝光的图片,处理后就会过曝。</span>""")examples_data = [["assets/input_0475.png", 300, "assets/out_0475.png"],["assets/input_0139.png", 1, "assets/out_0139.png"]]with gr.Row():gr.Examples(examples=examples_data, inputs=[input_image, ratio_single_bar, output_image], label="示例表格")process_button_single.click(self.validate_and_process_single,inputs=[input_image, ratio_single_bar],outputs=[output_image, error_message_box, error_message_box])return single_file_rowdef create_batch_file_ui(self):with gr.Row(visible=False) as batch_file_row:with gr.Column():with gr.Row(scale=1):input_folder = gr.File(label="选择输入文件夹,选择到最底层文件夹即可,不要选择单个文件", file_count="directory")with gr.Row(scale=1): output_folder = gr.Dropdown(choices=self.list_non_hidden_files(os.path.expanduser("~/Pictures")), label="选择输出文件夹")with gr.Row(): ratio_batch_bar = gr.Slider(label="提亮强度", minimum=1, maximum=300, value=100, step=1)with gr.Row():batch_process_button = gr.Button("处理", elem_id="batch-process-button")with gr.Row():error_message_box = gr.Textbox(label="提示", value="", visible=True, interactive=False)progress_display = gr.Textbox(label="处理进度", interactive=False)with gr.Row():input_image_display = gr.Image(label="当前输入图像", interactive=False)output_image_display = gr.Image(label="当前输出图像", interactive=False)batch_process_button.click(self.image_processor.enhance_night_image_batch,inputs=[input_folder, output_folder, ratio_batch_bar],outputs=[error_message_box, input_image_display, output_image_display, progress_display],queue=True)return batch_file_rowdef create_exif_parser_tab(self):with gr.TabItem("EXIF解析", id="exif_parser"):gr.Markdown("EXIF解析功能开发中...")def create_image_resize_tab(self):with gr.TabItem("图像resize", id="image_resize"):gr.Markdown("图像resize功能开发中...")@staticmethoddef list_non_hidden_files(path):"""列出指定路径下的非隐藏文件和文件夹"""if not os.path.exists(path):return []return [os.path.join(path, f) for f in os.listdir(path) if not f.startswith('.')]@staticmethoddef update_ui_mode(selected_mode):if selected_mode == "单个文件处理":return gr.update(visible=True), gr.update(visible=False)else:return gr.update(visible=False), gr.update(visible=True)def validate_and_process_single(self, file, ratio):"""验证文件格式并处理单张图像"""allowed_extensions = {".raw", ".dng", ".arw", ".nef"}if file is None:return None, "请上传一个文件。", gr.update(visible=True)_, ext = os.path.splitext(file.name)if ext.lower() not in allowed_extensions:return None, f"文件格式错误:{ext}。请上传RAW格式文件(例如:.raw, .dng)。", gr.update(visible=True)result = self.image_processor.enhance_night_image_single(file, ratio)return result, "", gr.update(visible=False)# def validate_and_process_batch(self, input_folder, output_folder, ratio):# """验证文件格式并处理批量图像"""# #return self.image_processor.enhance_night_image_batch(input_folder, output_folder, ratio)# error_message, input_image, output_image, progress_dis = self.image_processor.enhance_night_image_batch(input_folder, output_folder, ratio)# return error_message, input_image, output_image, progress_disdef launch(self):self.demo.launch(share=False)# 主函数
def main():device = DeviceChecker.get_device()image_processor = NightEnhancer(device)gradio_ui = GradioUI(image_processor)gradio_ui.launch()if __name__ == "__main__":main()
Gradio UI 编程方法总结
Gradio 是一个用于快速构建 Web 界面的 Python 库,适用于机器学习模型的可视化与交互。本代码展示了 Gradio UI 的完整开发流程,涵盖 组件、交互逻辑、回调函数 及 多页面管理。以下是 Gradio UI 编程的主要方法总结:
1. Gradio UI 的基本结构
Gradio 的 UI 由 Blocks、Tabs、Components 组成,并通过 事件绑定 连接逻辑。
(1) Blocks 作为 UI 容器
在 GradioUI 类中,所有 UI 组件都是在 gr.Blocks() 作用域内创建的:
with gr.Blocks() as demo:
Blocks是 Gradio 的高级 UI 容器,支持 多列、多行、组件交互。Tabs用于创建多页面界面,如 “夜景增强”、“EXIF解析” 等。
2. 使用 Tabs 组织多页面 UI
在 create_ui() 方法中,使用 gr.Tabs() 创建多个选项卡:
with gr.Tabs() as tabs:self.create_night_enhance_tab()self.create_exif_parser_tab()self.create_image_resize_tab()
每个选项卡对应一个功能模块,使得 UI 层次清晰,适合复杂的应用。
3. UI 组件的使用
Gradio 提供多种 输入输出组件,在 create_single_file_ui() 和 create_batch_file_ui() 方法中使用了多个 UI 组件:
(1) 输入组件
input_image = gr.File(label="输入RAW图像文件")
ratio_single_bar = gr.Slider(label="提亮强度", minimum=0, maximum=300, value=100, step=10)
mode = gr.Radio(["单个文件处理", "批量处理"], label="模式选择", value="单个文件处理")
gr.File()允许用户上传文件。gr.Slider()创建滑块调整参数。gr.Radio()创建单选按钮。
(2) 输出组件
output_image = gr.Image(label="输出图像")
error_message_box = gr.Textbox(label="错误提示", value="", visible=False, interactive=False)
gr.Image()显示处理后的图片。gr.Textbox()用于显示错误信息。
(3) 交互组件
process_button_single = gr.Button("处理", elem_id="batch-process-button")
gr.Button()触发图像处理逻辑。
4. 组件交互(事件绑定)
事件绑定是 Gradio UI 的核心,允许不同组件协同工作。本代码中,mode.change() 绑定了单选模式的 状态更新:
mode.change(self.update_ui_mode, inputs=[mode], outputs=[single_file_row, batch_file_row])
- 当
mode变化时,调用update_ui_mode(),根据模式切换 单文件 / 批量 UI 的可见性。
事件绑定的通用格式:
组件.事件(回调函数, inputs=[输入组件], outputs=[输出组件])
5. 处理逻辑与验证
在 validate_and_process_single() 中,进行 文件格式检查,并调用 image_processor 进行图像处理:
process_button_single.click(self.validate_and_process_single,inputs=[input_image, ratio_single_bar],outputs=[output_image, error_message_box, error_message_box]
)在这个process_button_single的按钮的点击事件上,绑定的是self.validate_and_process_single函数,`inputs=[input_image, ratio_single_bar]`表示self.validate_and_process_single函数接收两个input,一个是input_image,一个是ratio_single_bar。`outputs=[output_image, error_message_box, error_message_box]`表示self.validate_and_process_single的返回值与gradio的`output_image, error_message_box, error_message_box`这三个组件绑定,函数的返回值同步到组件的update上面。def validate_and_process_single(self, file, ratio):allowed_extensions = {".raw", ".dng", ".arw", ".nef"}if file is None:return None, "请上传一个文件。", gr.update(visible=True)_, ext = os.path.splitext(file.name)if ext.lower() not in allowed_extensions:return None, f"文件格式错误:{ext}。请上传RAW格式文件。", gr.update(visible=True)result = self.image_processor.enhance_night_image_single(file, ratio)return result, "", gr.update(visible=False)
- 检查
file是否为空。 - 确保文件格式为 RAW(
.dng,.arw,.nef)。 - 处理完成后返回 输出图像 和 错误信息。
6. 使用yield让组件交互(事件绑定)实时更新
在第5条,组件的更新通过validate_and_process_single函数的return来把output的结果同步到gradio的UI组件上,但是这样有个缺点,只有当函数全部运行完成,return结果后,gradio的UI组件才能更新。对于单个文件处理,这样是可以的。但是如果是批量文件处理,我们想在多个文件处理过程中看到正在处理第几个文件的log信息,使用return就不合适了,return后函数就运行完成了。所以使用yield可以完成这个需求。
batch_process_button.click(self.image_processor.enhance_night_image_batch,inputs=[input_folder, output_folder, ratio_batch_bar],outputs=[error_message_box, input_image_display, output_image_display, progress_display],queue=True
)#在这里,我们把gradio的UI上的批量处理的按钮的点击事件,绑定到`self.image_processor.enhance_night_image_batch`函数上。函数的实现为:def enhance_night_image_batch(self, input_folder, output_folder, ratio):"""批量增强夜景图像"""allowed_extensions = {".raw", ".dng", ".arw", ".nef"}total_files = len(input_folder)for idx, cur_file in enumerate(input_folder):cur_file_path = cur_fileif cur_file_path is None:yield "当前文件不存在", None, None, f"进度:{idx}/{total_files} 已处理"continuecur_file_name, ext = os.path.splitext(cur_file_path.name)if ext.lower() not in allowed_extensions:yield f"文件:{cur_file_path.name}不是raw文件,略过处理。请使用raw文件(例如:.raw, .dng)。", None, None, f"进度:{idx}/{total_files} 已处理"continuetry:raw = rawpy.imread(cur_file_path)im = raw.postprocess(use_camera_wb=True, half_size=False, no_auto_bright=True, output_bps=16)scale_full = np.expand_dims(np.float32(im / 65535.0), axis=0) * 1scale_full = scale_full[0, :, :, :]processed_image = (scale_full * 255).astype('uint8')result = self.enhance_night_image_single(cur_file_path, ratio)output_folder_path = os.path.join(output_folder, cur_file_name + "_enhanced.png")if result.dtype != np.uint8:result = (result * 255).astype(np.uint8)Image.fromarray(result, 'RGB').save(output_folder_path)yield f"文件{cur_file_path.name}处理完成,已保存到{output_folder_path}", processed_image, result, f"进度:{idx}/{total_files} 已处理"except Exception as e:yield f"处理文件 {cur_file_path.name} 时发生错误,略过处理,错误信息:{e}", None, None, f"进度:{idx}/{total_files} 已处理"continueyield "处理完成", None, None, f"进度:{total_files}/{total_files} 已处理"在enhance_night_image_batch函数中,我们通过yield来返回各组件的值。例如yield f"文件{cur_file_path.name}处理完成,已保存到{output_folder_path}", processed_image, result, f"进度:{idx}/{total_files} 已处理"这句,根据
batch_process_button.click(self.image_processor.enhance_night_image_batch,inputs=[input_folder, output_folder, ratio_batch_bar],outputs=[error_message_box, input_image_display, output_image_display, progress_display],queue=True
)
的事件绑定可知,yield的第一个返回值f"文件{cur_file_path.name}处理完成,已保存到{output_folder_path}"对应的是error_message_box的信息更新, processed_image对应的是input_image_display的UI信息更新,其他同理。通过yield,就不用等函数全部运行完成后更新UI的组件了,函数运行过程中就可以实现UI的更新。
7. 批量任务 & 进度更新
对于批量任务,create_batch_file_ui() 中实现:
batch_process_button.click(self.image_processor.enhance_night_image_batch,inputs=[input_folder, output_folder, ratio_batch_bar],outputs=[error_message_box, input_image_display, output_image_display, progress_display],queue=True # 允许任务排队执行
)
queue=True使任务支持排队,适用于 长时间运行的任务。- 处理过程中,
progress_display显示当前进度。
8. 启动 Gradio UI
launch() 方法用于启动 Web 界面:
def launch(self):self.demo.launch(share=False)
share=False仅在本地运行,设置为True可获取公网链接。
总结
Gradio UI 编程的 核心思想:
- 使用
Blocks组织 UI 结构(支持多页面)。 - 使用
Tabs划分功能模块(如"夜景增强"、“EXIF解析”)。 - 使用
Radio+Row控制 UI 显示状态(单个文件 vs 批量模式)。 - 组件交互(事件绑定)(按钮触发处理,单选框切换模式)。
- 使用
queue=True支持批量任务排队(适用于长时间任务)。 - 使用
launch()启动 Web 界面。
本代码展示了 完整的 Gradio UI 结构,适用于 图像处理、机器学习模型部署 等应用。🚀
相关文章:
部署夜景增强模型Learning to See in the Dark以及gradio UI编程方法
前面我们已经把Learning to See in the Dark的paper和原理进行了解读,现在把Learning to See in the Dark(后续简称SID模型)部署看一下效果。 这篇文章选择的部署方式是gradio 本地pytorch直接推理。先看一下效果: 对单个文件进…...

【报错解决】MySQL报错:sql_mode=only_full_group_by
文章目录 报错信息 DataGrip 报错还原Navicat 报错还原 报错原因解决方案 查看当前 sql mode方案一:临时解决方案二:永久解决方案三:使用 any_value() 或 group_concat()方案四:调整实现思路,避开 GROUP BY 使用 我…...

【大数据技术】用户行为日志分析(python+hadoop+mapreduce+yarn+hive)
用户行为日志分析(pythonhadoopmapreduceyarnhive) 搭建完全分布式高可用大数据集群(VMwareCentOSFinalShell) 搭建完全分布式高可用大数据集群(HadoopMapReduceYarn) 本机PyCharm远程连接虚拟机Python …...

[Day 16]螺旋遍历二维数组
今天我们看一下力扣上的这个题目:146.螺旋遍历二维数组 题目描述: 给定一个二维数组 array,请返回「螺旋遍历」该数组的结果。 螺旋遍历:从左上角开始,按照 向右、向下、向左、向上 的顺序 依次 提取元素,…...
大模型的底层逻辑及Transformer架构
一、大模型的底层逻辑 1.数据驱动 大模型依赖海量的数据进行训练,数据的质量和数量直接影响模型的性能。通过大量的数据,模型能够学习到丰富的模式和规律,从而更好地处理各种任务。 2.深度学习架构 大模型基于深度学习技术,通常采用多层神经网络进行特征学习与抽象。其中…...

数据结构-基础
1、概念: 程序 数据结构 算法 2、程序的好坏 可读性,稳定性,扩展性,时间复杂度,空间复杂度。 3、数据结构 是指存储、组织数据的方式,以便高效地进行访问和修改。通过选择适当的数据结构, 能…...

SystemUI中NavigationBar分析
需求 SystemUI是一个与系统组件显示紧密相关的应用,包含快捷中心、消息通知、状态栏、导航栏、任务中心等诸多模块,本文介绍NavigationBar模块。SystemUI源码位于/frameworks/base/packages/SystemUI,Android13平台。NavigationBar显示如下&…...

MySQL的底层原理与架构
前言 了解MySQL的架构和原理对于很多的后续很多的操作会有很大的帮助与理解。并且很多知识都与底层架构相关联。 了解MySQL架构 通过上面的架构图可以得知,Server层中主要由 连接器、查询缓存、解析器/分析器、优化器、执行器 几部分组成的,下面将主要…...

三极管的截止、放大、饱和区
三极管的几个区,都有什么用: 截止区:晶体管不导通,用于开关电路的“关”状态。 放大区:晶体管用于信号放大,集电极电流与基极电流成正比。 饱和区:晶体管完全导通,用于开关电路的“…...
 动态规划-习题1 300.最长递增子序列)
2025-2-7-算法学习(一) 动态规划-习题1 300.最长递增子序列
文章目录 算法学习(一) 动态规划-习题1 300.最长递增子序列(1)题目(2)举例:(3)提示(4)分析(5)动态规划代码:&a…...

学习日记-250207
一.论文 1.Prompt Learning for News Recommendation 任务不一致(LLM与实际任务)产生prompt提示。 Prompt Learning for News Recommendation 论文阅读 SIGIR2023-CSDN博客 2.GPT4Rec: A Generative Framework for Personalized Recommendation and…...

【Block总结】PSA,金字塔挤压注意力,解决传统注意力机制在捕获多尺度特征时的局限性
论文信息 标题: EPSANet: An Efficient Pyramid Squeeze Attention Block on Convolutional Neural Network论文链接: arXivGitHub链接: https://github.com/murufeng/EPSANet 创新点 EPSANet提出了一种新颖的金字塔挤压注意力(PSA)模块,旨…...

代码随想录算法训练营第三十一天| 回溯算法04
491. 递增子序列 题目: 代码随想录 视频讲解:回溯算法精讲,树层去重与树枝去重 | LeetCode:491.递增子序列_哔哩哔哩_bilibili 这题需要注意的点: 1. path长度在2以上才放入最终结果 2. 需要记录已经使用过的数字&am…...

pycharm集成通义灵码应用
在pycharm中安装通义灵码 1、打开files-settings 2、选中plugins-搜索”TONGYI Lingma“,点击安装 3.安装完成后在pycharm的右侧就有通义灵码的标签 4、登录账号 5、查看代码区域代码,每一个方法前面都多了通义灵码的标识,可以直接选择…...

赛博算命之 ”梅花易数“ 的 “JAVA“ 实现 ——从玄学到科学的探索
hello~朋友们!好久不见! 今天给大家带来赛博算命第三期——梅花易数的java实现 赛博算命系列文章: 周易六十四卦 掐指一算——小六壬 更多优质文章:个人主页 JAVA系列:JAVA 大佬们互三哦~互三必回!…...

【Leetcode刷题记录】54. 螺旋矩阵--模拟,以及循环条件处理的一些细节
54. 螺旋矩阵 给你一个 m 行 n 列的矩阵 matrix ,请按照 顺时针螺旋顺序 ,返回矩阵中的所有元素。 示例 1: 输入:matrix [[1,2,3],[4,5,6],[7,8,9]] 输出:[1,2,3,6,9,8,7,4,5] 解题思路 顺时针螺旋顺序也就是“从左向…...

c++计算机教程
目的 做出-*/%计算机 要求 做出可以计算-*/%的计算机 实现 完整代码 #include<bits/stdc.h> int main() {std::cout<<"加 减- 乘* 除/ 取余% \没有了|(因为可以算三位)"<<"\n"<<"提示:每打完一个符号或打完一个数,\…...

蓝桥杯Java之输入输出练习题
题目 1:多组AB(基础版) 题目描述: 输入多组数据,每组数据包含两个整数 A 和 B,计算它们的和。输入以 文件结尾(EOF) 结束。 输入格式: 每行包含两个整数 A 和 B&#x…...

【R语言】环境空间
一、环境空间的特点 环境空间是一种特殊类型的变量,它可以像其它变量一样被分配和操作,还可以以参数的形式传递给函数。 R语言中环境空间具有如下3个特点: 1、对象名称唯一性 此特点指的是在不同的环境空间中可以有同名的变量出现&#x…...

【系统架构设计师】分布式数据库透明性
目录 1. 说明2. 分片透明3. 复制透明4. 位置透明5. 逻辑透明(局部数据模型透明)6.例题6.1 例题1 1. 说明 1.在分布式数据库系统中,分片透明、复制透明、位置透明和逻辑透明是几个重要的基本概念。2.分片透明、复制透明、位置透明和逻辑透明是…...

“梦想、汗水、坚持”2026 SNH48 GROUP年度青春盛典5月30日正式启动
“十三而砺,向新而行。”中国大型青春女团SNH48 GROUP运营方上海丝芭文化传媒集团有限公司即日宣布:2026 SNH48 GROUP第十三届年度青春盛典大型系列活动将于5月30日正式启动,本届年度青春盛典颁奖典礼暨汇报演唱会定档8月8日,落地…...

MVDRAM技术:利用DRAM隐藏计算潜力加速LLM推理
1. MVDRAM技术背景与核心挑战在当今大语言模型(LLM)推理场景中,矩阵向量乘法(GeMV)操作占据了超过70%的计算开销。传统CPU/GPU架构面临三个根本性瓶颈:内存墙问题(数据搬运能耗是计算的200倍&am…...

Rust构建的跨平台数据备份工具relic:安全高效的快照管理与自动化策略
1. 项目概述:一个面向未来的跨平台数据备份与同步工具最近在整理个人工作流时,我一直在寻找一个能让我在不同设备、不同操作系统之间无缝同步项目配置、文档和代码片段的工具。市面上的云盘虽然方便,但总感觉不够“程序员友好”——要么同步粒…...

接入Taotoken后感受到的API调用延迟降低与错误率改善
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 接入Taotoken后感受到的API调用延迟降低与错误率改善 1. 背景与切换契机 作为一名长期在项目中集成大模型能力的开发者࿰…...

面试时被问“你的缺点是什么”,这样回答反而加分
面试中,当面试官看似随意地问出“你的缺点是什么”时,空气往往会突然安静几秒。对软件测试工程师而言,这个问题尤其微妙——我们每天都在和“找茬”打交道,对缺陷和风险有着本能的敏感。然而,面试官抛出这个问题&#…...

思源宋体CN终极指南:7种字重免费商用中文字体快速上手完整教程
思源宋体CN终极指南:7种字重免费商用中文字体快速上手完整教程 【免费下载链接】source-han-serif-ttf Source Han Serif TTF 项目地址: https://gitcode.com/gh_mirrors/so/source-han-serif-ttf 还在为商业项目中文字体版权问题而烦恼吗?思源宋…...

GitHub开源项目法律合规自动化:exoclaw-github的设计与实现
1. 项目概述:一个为GitHub仓库定制的“法律条款”守护者最近在开源社区里折腾,发现一个挺有意思的现象:很多开发者辛辛苦苦维护的项目,因为缺少清晰、合规的贡献者协议或开源许可证,导致后续在代码合并、版权归属甚至商…...

从Starpod项目解析个人AI工作流引擎:架构、实现与应用
1. 项目概述:从“星荚”到个人AI工作流引擎最近在AI工具圈里,一个名为sinaptik-ai/starpod的项目引起了我的注意。乍一看这个标题,可能会觉得有些抽象——“星荚”是什么?AI“豆荚”?但当你深入其GitHub仓库࿰…...
)
NotebookLM+人类学工作流重构:3类濒危语言档案处理实录(附可复用知识图谱架构)
更多请点击: https://intelliparadigm.com 第一章:NotebookLM人类学研究辅助 NotebookLM 是 Google 推出的基于 LLM 的研究型笔记工具,其核心能力在于对用户上传的私有文档(如田野笔记、访谈转录稿、民族志手稿、考古报告 PDF 等…...

Windows下用Python调用CDS API下载ERA5数据,报错Missing/incomplete configuration?手把手教你创建.cdsapirc配置文件
Windows下Python调用CDS API下载ERA5数据报错排查指南:从配置文件创建到隐藏文件陷阱全解析 当你在Windows系统上首次尝试使用Python调用CDS API下载ERA5气象数据时,可能会遇到一个令人困惑的报错:"Missing/incomplete configuration f…...