亚博microros小车-原生ubuntu支持系列:25 二维码控制运动
二维码识别
安装依赖
pip3 install pyzbarsudo apt install libzbar-dev在用小车识别之前,先用电脑的摄像头测试下基本的识别
import cv2
import rclpy
from rclpy.node import Node
import pyzbar.pyzbar as pyzbar
import numpy as np
from ament_index_python.packages import get_package_share_directory #获取shares目录绝对路径class OpenCVNode(Node):def __init__(self, name):super().__init__(name)self.cap = cv2.VideoCapture(0) # 打开默认摄像头def run(self):while True:success, img = self.cap.read() # 读取一帧视频if not success:print("Failed to read frame")breakfor bar_code in pyzbar.decode(img):# 解码二维码数据print(bar_code.data.decode('utf8')) # 打印二维码数据print(bar_code.type) # 打印二维码类型print(bar_code.rect) # 打印二维码四周边界(矩形框)print(bar_code.polygon) # 打印二维码多边形边框print(bar_code.quality) # 打印二维码质量print(bar_code.orientation) # 打印二维码方向# 绘制二维码边界points = np.array(bar_code.polygon, np.int32)points = points.reshape((-1, 1, 2))cv2.polylines(img=img, pts=[points], isClosed=True, color=(0, 0, 255), thickness=3)# 在图像上显示二维码数据cv2.putText(img=img,text=bar_code.data.decode('utf8'),org=(bar_code.rect.left, bar_code.rect.top),fontFace=cv2.FONT_HERSHEY_SIMPLEX,fontScale=0.8,color=(0, 0, 255),thickness=2)# 显示图像cv2.imshow('code', img)# 按下 'q' 键退出循环if cv2.waitKey(1) & 0xFF == ord('q'):self.cap.release() # 释放摄像头资源cv2.destroyAllWindows() # 关闭所有OpenCV窗口break
def main():rclpy.init()node = OpenCVNode('opencvNode')node.run() rclpy.spin(node)rclpy.shutdown()效果:
我随便找了个包装袋的条码

二维码:

玩法简介
本课程主要利用机器人的摄像头,获取摄像头的画面,识别二维码信息,根据二维码信息控制机器人运动。
#小车代理
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:humble udp4 --port 8090 -v4
#摄像头代理(先启动代理再打开小车开关)
docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:humble udp4 --port 9999 -v4
启动
ros2 run yahboom_esp32ai_car qrTracker
开启识别二维码并执行指令。目前例程中能识别的二维码为QRCode,信息为"forward"表示前进,"back"表示后退,"left"表示左平移,"right"表示右平移,"stop"表示停止。"turnleft"表示左旋转,"turnright"表示右旋转,"stop"表示停止。

只是测试,这种不如小车键盘控制方便,因为小车运动后摄像头丢失控制图片。
src/yahboom_esp32ai_car/yahboom_esp32ai_car/目录下新建文件qrTracker.py,代码如下
import rclpy
from rclpy.node import Nodefrom std_msgs.msg import Int32, Bool,UInt16
from geometry_msgs.msg import Twist
import cv2
import time
import numpy as np
import pyzbar.pyzbar as pyzbar
from PIL import Imagefrom cv_bridge import CvBridge
from sensor_msgs.msg import Image, CompressedImagefrom rclpy.time import Time
import datetimeclass QR_Tracker(Node):def __init__(self,name):super().__init__(name)self.pub_cmdVel = self.create_publisher(Twist,"/cmd_vel",1)self.pub_Buzzer = self.create_publisher(UInt16,"/beep",1)self.pub_Servo1 = self.create_publisher(Int32,"servo_s1" , 10)self.pub_Servo2 = self.create_publisher(Int32,"servo_s2" , 10)self.PWMServo_X = 0self.PWMServo_Y = 0self.s1_init_angle = Int32()self.s1_init_angle.data = self.PWMServo_Xself.s2_init_angle = Int32()self.s2_init_angle.data = self.PWMServo_Yfor i in range(10): #确保舵机初始化角度正常self.pub_Servo2.publish(self.s2_init_angle)self.pub_Servo1.publish(self.s1_init_angle)time.sleep(0.1) #100msdef detect_qrcode(self,image):#self.pub_Servo2.publish(self.s2_init_angle)#self.pub_Servo1.publish(self.s1_init_angle)gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # 转为灰度图像 barcodes = pyzbar.decode(gray)#识别条码for barcode in barcodes: # 提取二维码的数据和边界框的位置(x, y, w, h) = barcode.rectbarcodeData = barcode.data.decode("utf-8")barcodeType = barcode.typereturn barcodeData, (x, y, w, h)return None, (0, 0, 0, 0)def pub_vel(self, x, y, z):twist = Twist()twist.linear.x = xtwist.linear.y = ytwist.angular.z = zself.pub_cmdVel.publish(twist)#根据info的字符串命令控制机器人运动。def robot_action(self,data):if data == "forward":self.pub_vel(0.3,0.0,0.0)elif data == "back":self.pub_vel(-0.3,0.0,0.0)elif data == "left":self.pub_vel(0.0,0.0,1.0)elif data == "right":self.pub_vel(0.0,0.0,-1.0)elif data == "turnright":self.pub_vel(0.3,0.0,-0.5)elif data == "turnleft":self.pub_vel(0.3,0.0,0.5)elif data == "stop":self.pub_vel(0.0,0.0,0.0)class MY_Picture(Node):def __init__(self, name):super().__init__(name)self.bridge = CvBridge()self.sub_img = self.create_subscription(CompressedImage, '/espRos/esp32camera', self.handleTopic, 1) #获取esp32传来的图像self.QRdetect = QR_Tracker("QR_Tracker")self.last_stamp = Noneself.new_seconds = 0self.fps_seconds = 1def handleTopic(self, msg):self.last_stamp = msg.header.stamp if self.last_stamp:total_secs = Time(nanoseconds=self.last_stamp.nanosec, seconds=self.last_stamp.sec).nanosecondsdelta = datetime.timedelta(seconds=total_secs * 1e-9)seconds = delta.total_seconds()*100if self.new_seconds != 0:self.fps_seconds = seconds - self.new_secondsself.new_seconds = seconds#保留这次的值start = time.time()frame = self.bridge.compressed_imgmsg_to_cv2(msg)frame = cv2.resize(frame, (640, 480))action = cv2.waitKey(10) & 0xFF#图像处理逻辑,识别到二维码就画框,展示文本,发布动作,没有识别到二维码就停止payload, (x, y, w, h) = self.QRdetect.detect_qrcode(frame.copy())if payload != None:cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 225, 255), 2)cv2.putText(frame, payload, (x, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0, 225, 255), 2)self.QRdetect.robot_action(payload)else:self.QRdetect.pub_vel(0.0,0.0,0.0)end = time.time()fps = 1 / ((end - start)+self.fps_seconds)text = "FPS : " + str(int(fps))cv2.putText(frame, text, (10,20), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0,255,255), 2)cv2.imshow('frame', frame)#rclpy.spin(self.QRdetect)def main():rclpy.init()esp_img = MY_Picture("My_Picture")print("start it")try:rclpy.spin(esp_img)except KeyboardInterrupt:passfinally:esp_img.destroy_node()rclpy.shutdown()以上。
相关文章:
亚博microros小车-原生ubuntu支持系列:25 二维码控制运动
二维码识别 安装依赖 pip3 install pyzbarsudo apt install libzbar-dev 在用小车识别之前,先用电脑的摄像头测试下基本的识别 import cv2 import rclpy from rclpy.node import Node import pyzbar.pyzbar as pyzbar import numpy as np from ament_index_pyth…...
基于深度学习的人工智能量化衰老模型构建与全流程应用研究
一、引言 1.1 研究背景与意义 1.1.1 人口老龄化现状与挑战 人口老龄化是当今全球面临的重要社会趋势之一,其发展态势迅猛且影响深远。根据联合国的相关数据,1980 年,全球 65 岁及以上人口数量仅为 2.6 亿,到 2021 年,这一数字已翻番,达到 7.61 亿,而预计到 2050 年,…...

【医院运营统计专题】2.运营统计:医院管理的“智慧大脑”
医院成本核算、绩效管理、运营统计、内部控制、管理会计专题索引 引言 在当今医疗行业快速发展的背景下,医院运营管理的科学性和有效性成为了决定医院竞争力和可持续发展能力的关键因素。运营统计作为医院管理的重要工具,通过对医院各类数据的收集、整理、分析和解读,为医…...

Spring Boot Actuator使用
说明:本文介绍Spring Boot Actuator的使用,关于Spring Boot Actuator介绍,下面这篇博客写得很好,珠玉在前,我就不多介绍了。 Spring Boot Actuator 简单使用 项目里引入下面这个依赖 <!--Spring Boot Actuator依…...

【AI应用】免费的文本转语音工具:微软 Edge TTS 和 开源版 ChatTTS 对比
【AI论文解读】【AI知识点】【AI小项目】【AI战略思考】【AI日记】【读书与思考】【AI应用】 我试用了下Edge TTS,感觉还不错,不过它不支持克隆声音(比如自己的声音) 微软 Edge TTS 和 开源版 ChatTTS 都是免费的 文本转语音&…...
如何在 Qt 中添加和使用系统托盘图标
在 Qt 中实现系统托盘图标是一个常见的需求,尤其是在桌面应用程序中。系统托盘图标可以让应用程序在后台运行时仍然具有可见性,同时避免占用过多的桌面空间。本文将详细介绍如何在 Qt 项目中添加托盘图标,并通过资源系统(.qrc 文件…...
【WB 深度学习实验管理】利用 Hugging Face 实现高效的自然语言处理实验跟踪与可视化
本文使用到的 Jupyter Notebook 可在GitHub仓库002文件夹找到,别忘了给仓库点个小心心~~~ https://github.com/LFF8888/FF-Studio-Resources 在自然语言处理领域,使用Hugging Face的Transformers库进行模型训练已经成为主流。然而,随着模型复…...
基础入门-网站协议身份鉴权OAuth2安全Token令牌JWT值Authirization标头
知识点: 1、网站协议-http/https安全差异(抓包) 2、身份鉴权-HTTP头&OAuth2&JWT&Token 一、演示案例-网站协议-http&https-安全测试差异性 1、加密方式 HTTP:使用明文传输,数据在传输过程中可以被…...
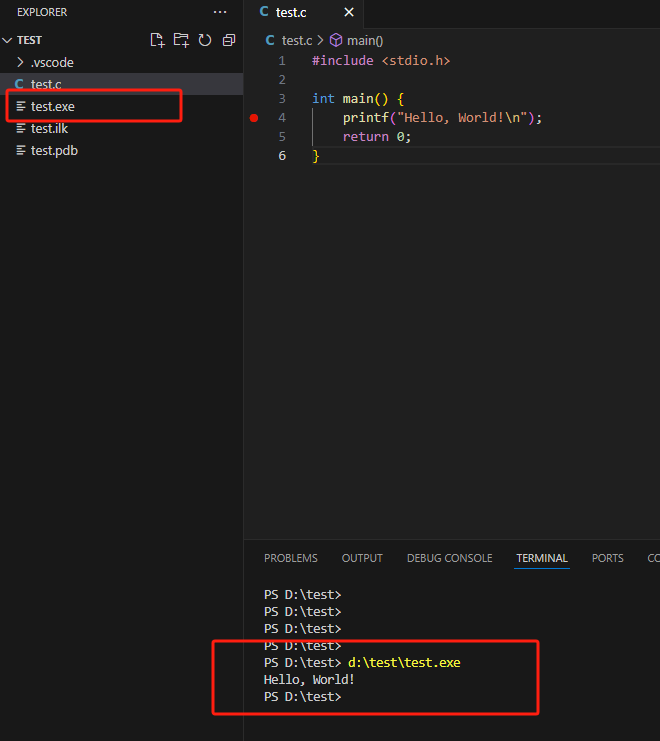
C语言基础系列【3】VSCode使用
前面我们提到过VSCode有多么的好用,本文主要介绍如何使用VSCode编译运行C语言代码。 安装 首先去官网(https://code.visualstudio.com/)下载安装包,点击Download for Windows 获取安装包后,一路点击Next就可以。 配…...

MySQL-5.7.44安装(CentOS7)
目录 1、下载安装包并解压 2、创建数据目录与日志目录 3、设置环境变量 4、刷新环境变量 5、执行初始化 6、创建配置文件目录 7、新建配置文件 8、为安装目录赋予可执行权限 9、创建服务启动脚本 10、启动服务并将启动脚本加入开机自启动 11、查看服务状态 12、创建…...

服务端与多客户端照片的传输,recv,send
一、照片传输 server.c /* * 文件名称:server.c * 创 建 者: * 创建日期:2025年02月07日 * 描 述: */ #include <stdio.h> #include <sys/types.h> /* See NOTES */ #include <sys/socket.h…...

JS实现灯光闪烁效果
在 JS中,我们可以实现灯光闪烁效果,这里主要用 setInterval 和 clearInterval 两个重要方法。 效果图 源代码 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><title>灯闪烁效果<…...

SpringCloud面试题----Nacos和Eureka的区别
功能特性 服务发现 Nacos:支持基于 DNS 和 RPC 的服务发现,提供了更为灵活的服务发现机制,能满足不同场景下的服务发现需求。Eureka:主要基于 HTTP 的 RESTful 接口进行服务发现,客户端通过向 Eureka Server 发送 HT…...

verilog练习:i2c slave 模块设计
文章目录 前言1. 结构2.代码2.1 iic_slave.v2.2 sync.v2.3 wr_fsm.v2.3.1 状态机状态解释 2.4 ram.v 3. 波形展示4. 建议5. 资料总结 前言 首先就不啰嗦iic协议了,网上有不少资料都是叙述此协议的。 下面将是我本次设计的一些局部设计汇总,如果对读者有…...
)
3.5 Go(特殊函数)
目录 一、匿名函数 1、匿名函数的特点: 2、匿名函数代码示例 2、匿名函数的类型 二、递归函数 1. 递推公式版本 2. 循环改递归 三、嵌套函数 1、嵌套函数用途 2、代码示例 3、作用域 & 变量生存周期 四、闭包 1、闭包使用场景 2、代码示例 五、De…...

Android的MQTT客户端实现
在 Android 平台上实现 MQTT 客户端的完整技术方案,涵盖基础实现、安全连接、性能优化和最佳实践: 一、技术选型与依赖配置 推荐库 Eclipse Paho Android Service(官方维护,支持后台运行) gradle 复制 // build.gradl…...
国产编辑器EverEdit - 编辑辅助功能介绍
1 编辑辅助功能 1.1 各编辑辅助选项说明 1.1.1 行号 打开该选项时,在编辑器主窗口左侧显示行号,如下图所示: 1.1.2 文档地图 打开该选项时,在编辑器主窗口右侧靠近垂直滚动条的地方显示代码的缩略图,如下图所示&…...

WPF 在后台使TextBox失去焦点的方法
在软件设计开发的时候,偶尔会遇到在后台xaml.cs后台中,要将TextBox控件的焦点取消或者使TextBox控件获取焦点,下面介绍讲述一种简单的“只让特定的 TextBox 失去焦点”方法: 前端xaml代码示例: <StackPanel Orientation"…...
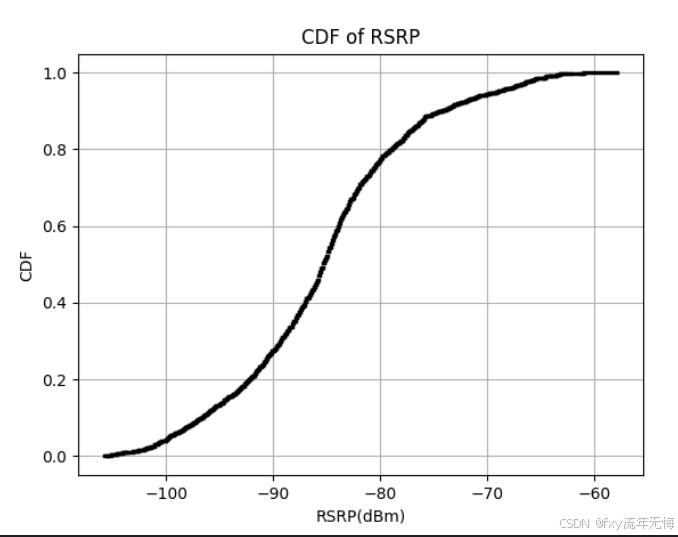
工作案例 - python绘制excell表中RSRP列的CDF图
什么是CDF图 CDF(Cumulative Distribution Function)就是累积分布函数,是概率密度函数的积分。CDF函数是一个在0到1之间的函数,描述了随机变量小于或等于一个特定值的概率。在可视化方面,CDF图表明了一个随机变量X小于…...
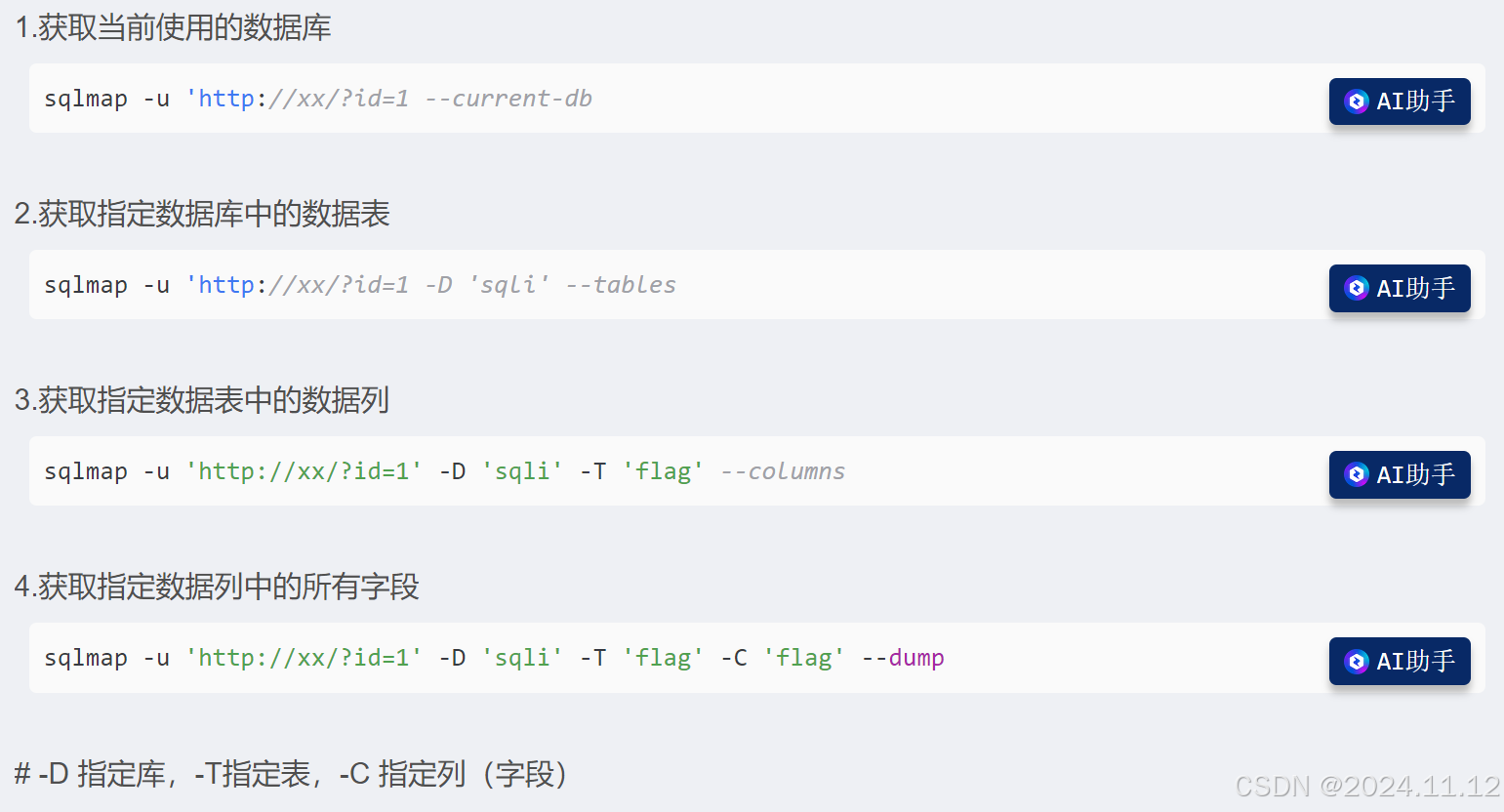
CTF SQL注入学习笔记
部分内容来自于SQL注入由简入精_哔哩哔哩_bilibili SQL语句 1.mysqli_error():返回最近调用函数的最后一个错误描述 语法:mysqli_error(connection) 规定要使用的Mysql连接; 返回一个带有错误描述的字符串。如果没有错误发生则返回 "" 2…...

Cursor与Figma通过MCP协议实现AI辅助设计与开发同步
1. 项目概述:当代码编辑器与设计工具“开口说话”最近在开发者社区里,一个名为“cursor-talk-to-figma-mcp”的项目引起了我的注意。这个由开发者“hamadoun1760”开源的仓库,名字直译过来就是“Cursor与Figma对话的MCP”。乍一看,…...

嵌入式事件驱动框架Curtroller:模块化设计提升开发效率
1. 项目概述与核心价值最近在嵌入式开发社区里,一个名为“Curtroller”的项目引起了我的注意。这个项目由开发者KenWuqianghao在GitHub上开源,名字本身就是一个巧妙的组合——“Curt”(可能是“Current”电流的缩写或“Control”控制的变体&a…...

ESP32接入ChatGPT API:构建本地化AIoT智能交互终端
1. 项目概述:当ESP32遇见ChatGPT,开启本地化智能交互新玩法最近在捣鼓ESP32开发板,总想着给它加点“智能”的料。传统的物联网项目,比如温湿度监测、远程控制开关,虽然实用,但总觉得少了点“灵魂”。直到我…...

Godot游戏引擎与强化学习结合:从零构建AI智能体的实战指南
1. 项目概述:当游戏开发遇上强化学习如果你是一名游戏开发者,或者对游戏AI的实现抱有浓厚兴趣,那么“edbeeching/godot_rl_agents”这个项目绝对值得你花时间深入研究。简单来说,这是一个将当下最热门的强化学习技术与免费、开源的…...

构建高质量Awesome教程库:从Claude Code实战到开发者知识体系搭建
1. 项目概述:一个为Claude Code打造的开发者知识库 最近在GitHub上看到一个挺有意思的项目,叫“awesome-claudcode-tutorial”。光看名字,你可能会有点懵——“Claude Code”是什么?这其实是一个由开发者社区推动的、围绕特定AI编…...

如何快速掌握G-Helper:华硕笔记本轻量级控制工具完全指南
如何快速掌握G-Helper:华硕笔记本轻量级控制工具完全指南 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zenbook,…...

3分钟掌握FanControl:Windows风扇控制终极指南
3分钟掌握FanControl:Windows风扇控制终极指南 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending/fa/FanCon…...

ctfileGet:城通网盘直连地址解析工具的技术原理与实用指南
ctfileGet:城通网盘直连地址解析工具的技术原理与实用指南 【免费下载链接】ctfileGet 获取城通网盘一次性直连地址 项目地址: https://gitcode.com/gh_mirrors/ct/ctfileGet ctfileGet是一个基于Web的开源工具,专门用于解析城通网盘分享链接并获…...

大学正在悄悄 “僵尸化”,AI正在毁掉高等教育内核?!
【大学正在悄悄 “僵尸化”,AI正在毁掉高等教育内核】快速阅读:大学正面临一场名为“僵尸化”的危机。当学生和教授都开始将 AI 用于替代思考、替代教学、甚至替代沟通时,高等教育正在从知识的殿堂退化为一种由算法驱动的、高度标准化的凭证工…...

树莓派5本地大模型实时分析SEN6x环境传感器数据实战
1. 项目概述:当环境传感器遇上本地大模型在物联网和边缘计算领域,我们早已习惯了这样的工作流:传感器采集数据,微控制器或单板计算机(比如树莓派)负责收集和上传,最终的数据分析和洞察则交给云端…...