LeetCode 0063.不同路径 II:动态规划 - 原地使用地图数组,几乎无额外空间开销
【LetMeFly】63.不同路径 II:动态规划 - 原地使用地图数组,几乎无额外空间开销
力扣题目链接:https://leetcode.cn/problems/unique-paths-ii/
给定一个 m x n 的整数数组 grid。一个机器人初始位于 左上角(即 grid[0][0])。机器人尝试移动到 右下角(即 grid[m - 1][n - 1])。机器人每次只能向下或者向右移动一步。
网格中的障碍物和空位置分别用 1 和 0 来表示。机器人的移动路径中不能包含 任何 有障碍物的方格。
返回机器人能够到达右下角的不同路径数量。
测试用例保证答案小于等于 2 * 109。
示例 1:

输入:obstacleGrid = [[0,0,0],[0,1,0],[0,0,0]]
输出:2
解释:3x3 网格的正中间有一个障碍物。
从左上角到右下角一共有 2 条不同的路径:
1. 向右 -> 向右 -> 向下 -> 向下
2. 向下 -> 向下 -> 向右 -> 向右
示例 2:

输入:obstacleGrid = [[0,1],[0,0]] 输出:1
提示:
m == obstacleGrid.lengthn == obstacleGrid[i].length1 <= m, n <= 100obstacleGrid[i][j]为0或1
解题方法:动态规划
直接使用原来的obstacleGrid数组,令obstacleGrid[i][j]代表走到(i, j)为止的总方案数。
因为是原地修改,所以就要求我们从左到右从上到下按顺序遍历。
遍历到一个元素时:
- 如果这个元素为
1,就说明这里是障碍,走这里的方案数为0; - 否则,走这里的方案数为“由上面来”和“由左边来”的方案数之和(若不可由上而来则将“由上面来”的方案数记为1)。
特别的,对于起始位置obstacleGrid[0][0]:
- 若初始值为
1说明不可从这里出发,总方案数为0; - 若初始值为
0说明可以从这里出发,令obstacleGrid[0][0] = 1。
时空复杂度分析
- 时间复杂度 O ( s i z e ( o b s t a c l e G r i d ) ) O(size(obstacleGrid)) O(size(obstacleGrid))
- 空间复杂度 O ( 1 ) O(1) O(1)
AC代码
Python
'''
Author: LetMeFly
Date: 2025-02-08 09:55:16
LastEditors: LetMeFly.xyz
LastEditTime: 2025-02-08 09:58:42
'''
from typing import Listclass Solution:def uniquePathsWithObstacles(self, a: List[List[int]]) -> int:a[0][0] = 0 if a[0][0] else 1for i in range(len(a)):for j in range(len(a[0])):if a[i][j] != 0 and (i or j):a[i][j] = 0continueif i > 0:a[i][j] += a[i - 1][j]if j > 0:a[i][j] += a[i][j - 1]return a[-1][-1]
C++
/** @Author: LetMeFly* @Date: 2025-02-08 09:36:16* @LastEditors: LetMeFly.xyz* @LastEditTime: 2025-02-08 09:53:50*/
class Solution {
public:int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {for (int i = 0; i < obstacleGrid.size(); i++) {for (int j = 0; j < obstacleGrid[0].size(); j++) {if (i == 0 && j == 0) {obstacleGrid[i][j] = obstacleGrid[i][j] ? 0 : 1;continue;} else if (obstacleGrid[i][j]) {obstacleGrid[i][j] = -1;continue;}if (i > 0 && obstacleGrid[i - 1][j] != -1) {obstacleGrid[i][j] += obstacleGrid[i - 1][j];}if (j > 0 && obstacleGrid[i][j - 1] != -1) {obstacleGrid[i][j] += obstacleGrid[i][j - 1];}}}return max(obstacleGrid.back().back(), 0);}
};
Java
/** @Author: LetMeFly* @Date: 2025-02-08 09:55:20* @LastEditors: LetMeFly.xyz* @LastEditTime: 2025-02-08 10:02:07*/
class Solution {public int uniquePathsWithObstacles(int[][] a) {if (a[0][0] == 1) {return 0;}a[0][0] = 1;for (int i = 0; i < a.length; i++) {for (int j = 0; j < a[0].length; j++) {if (a[i][j] == 1 && i + j > 0) {a[i][j] = 0;continue;}if (i > 0) {a[i][j] += a[i - 1][j];}if (j > 0) {a[i][j] += a[i][j - 1];}}}return a[a.length - 1][a[0].length - 1];}
}
Go
/** @Author: LetMeFly* @Date: 2025-02-08 09:55:29* @LastEditors: LetMeFly.xyz* @LastEditTime: 2025-02-08 10:04:49*/
package mainfunc uniquePathsWithObstacles(a [][]int) int {if a[0][0] == 1 {return 0}a[0][0] = 1for i := range a {for j := range a[0] {if a[i][j] == 1 && i + j > 0 {a[i][j] = 0continue}if i > 0 {a[i][j] += a[i - 1][j]}if j > 0 {a[i][j] += a[i][j - 1]}}}return a[len(a) - 1][len(a[0]) - 1]
}
同步发文于CSDN和我的个人博客,原创不易,转载经作者同意后请附上原文链接哦~
千篇源码题解已开源
Tisfy:https://letmefly.blog.csdn.net/article/details/145509662
相关文章:
LeetCode 0063.不同路径 II:动态规划 - 原地使用地图数组,几乎无额外空间开销
【LetMeFly】63.不同路径 II:动态规划 - 原地使用地图数组,几乎无额外空间开销 力扣题目链接:https://leetcode.cn/problems/unique-paths-ii/ 给定一个 m x n 的整数数组 grid。一个机器人初始位于 左上角(即 grid[0][0]&#…...

elementui:el-table支持搜索、切换分页多选功能,以及数据回显
1、el-table相关代码,需注意:row-key"(row) > { return row.id }" 以及 :reserve-selection"true" <div class"boxList"><div class"search-form"><!-- 搜索表单 --><el-form :inline"true&q…...

深度整理总结MySQL——索引正确使用姿势
索引正确使用姿势 前言MySQL索引优缺点分析✅ 索引的优势⚠️ 索引的代价 如何合理建立索引?——关键原则总结重要的优化机制索引覆盖——通俗的方式讲解索引下推索引跳跃式扫描 前言 这篇文章是补充一些基本概念和实战的一些使用建议. MySQL索引优缺点分析 ✅ 索引的优势 …...

使用LLaMA Factory踩坑记录
前置条件:电脑显卡RTX 4080 问题:LLaMA-Factory在运行的时候,弹出未检测到CUDA的报错信息 结论:出现了以上的报错,主要可以归结于以下两个方面: 1、没有安装GPU版本的pytorch,下载的是CPU版本…...

亚博microros小车-原生ubuntu支持系列:25 二维码控制运动
二维码识别 安装依赖 pip3 install pyzbarsudo apt install libzbar-dev 在用小车识别之前,先用电脑的摄像头测试下基本的识别 import cv2 import rclpy from rclpy.node import Node import pyzbar.pyzbar as pyzbar import numpy as np from ament_index_pyth…...
基于深度学习的人工智能量化衰老模型构建与全流程应用研究
一、引言 1.1 研究背景与意义 1.1.1 人口老龄化现状与挑战 人口老龄化是当今全球面临的重要社会趋势之一,其发展态势迅猛且影响深远。根据联合国的相关数据,1980 年,全球 65 岁及以上人口数量仅为 2.6 亿,到 2021 年,这一数字已翻番,达到 7.61 亿,而预计到 2050 年,…...

【医院运营统计专题】2.运营统计:医院管理的“智慧大脑”
医院成本核算、绩效管理、运营统计、内部控制、管理会计专题索引 引言 在当今医疗行业快速发展的背景下,医院运营管理的科学性和有效性成为了决定医院竞争力和可持续发展能力的关键因素。运营统计作为医院管理的重要工具,通过对医院各类数据的收集、整理、分析和解读,为医…...

Spring Boot Actuator使用
说明:本文介绍Spring Boot Actuator的使用,关于Spring Boot Actuator介绍,下面这篇博客写得很好,珠玉在前,我就不多介绍了。 Spring Boot Actuator 简单使用 项目里引入下面这个依赖 <!--Spring Boot Actuator依…...

【AI应用】免费的文本转语音工具:微软 Edge TTS 和 开源版 ChatTTS 对比
【AI论文解读】【AI知识点】【AI小项目】【AI战略思考】【AI日记】【读书与思考】【AI应用】 我试用了下Edge TTS,感觉还不错,不过它不支持克隆声音(比如自己的声音) 微软 Edge TTS 和 开源版 ChatTTS 都是免费的 文本转语音&…...
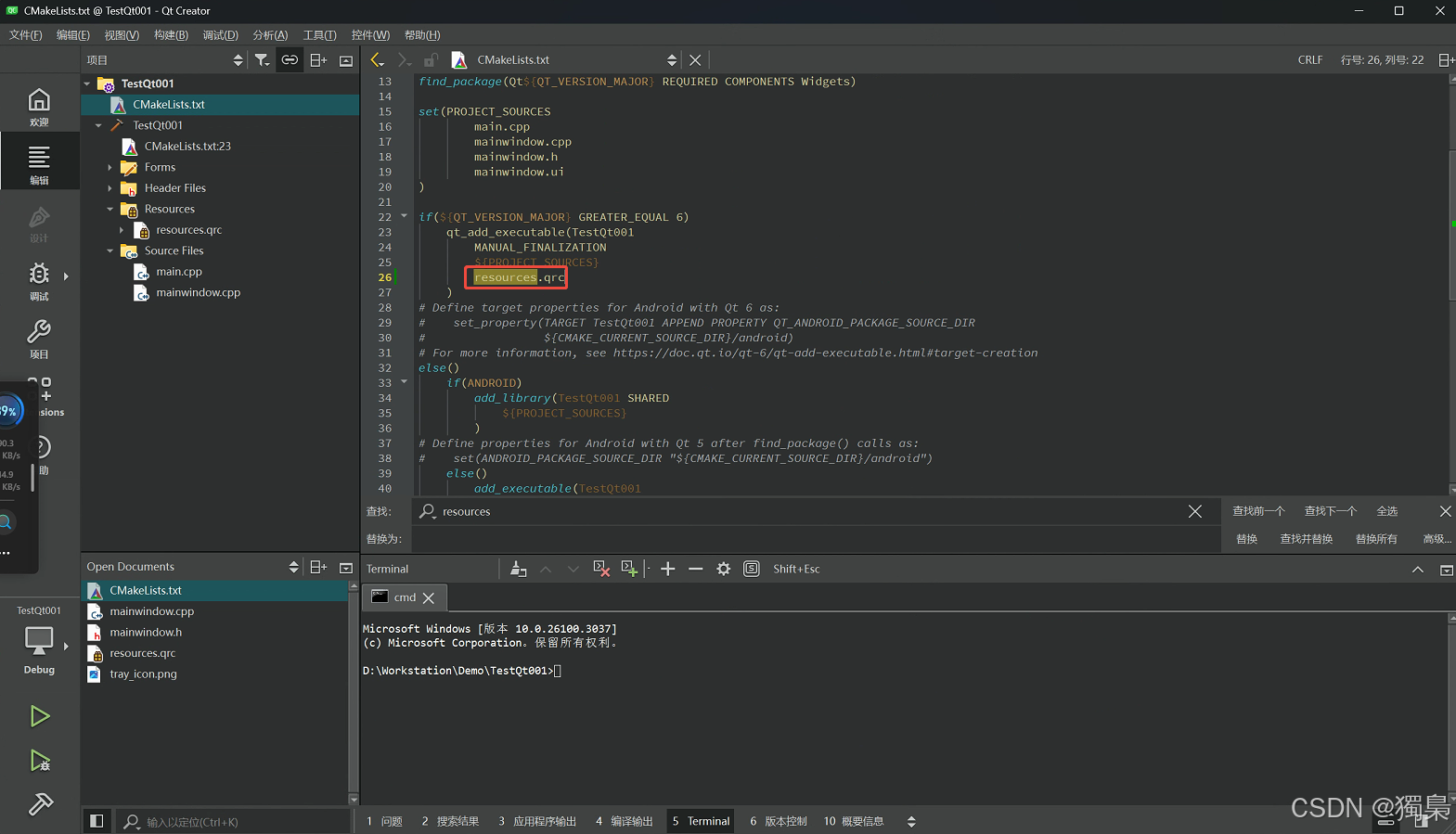
如何在 Qt 中添加和使用系统托盘图标
在 Qt 中实现系统托盘图标是一个常见的需求,尤其是在桌面应用程序中。系统托盘图标可以让应用程序在后台运行时仍然具有可见性,同时避免占用过多的桌面空间。本文将详细介绍如何在 Qt 项目中添加托盘图标,并通过资源系统(.qrc 文件…...
【WB 深度学习实验管理】利用 Hugging Face 实现高效的自然语言处理实验跟踪与可视化
本文使用到的 Jupyter Notebook 可在GitHub仓库002文件夹找到,别忘了给仓库点个小心心~~~ https://github.com/LFF8888/FF-Studio-Resources 在自然语言处理领域,使用Hugging Face的Transformers库进行模型训练已经成为主流。然而,随着模型复…...
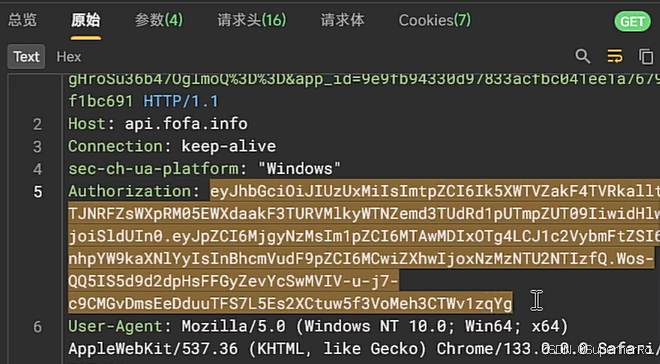
基础入门-网站协议身份鉴权OAuth2安全Token令牌JWT值Authirization标头
知识点: 1、网站协议-http/https安全差异(抓包) 2、身份鉴权-HTTP头&OAuth2&JWT&Token 一、演示案例-网站协议-http&https-安全测试差异性 1、加密方式 HTTP:使用明文传输,数据在传输过程中可以被…...
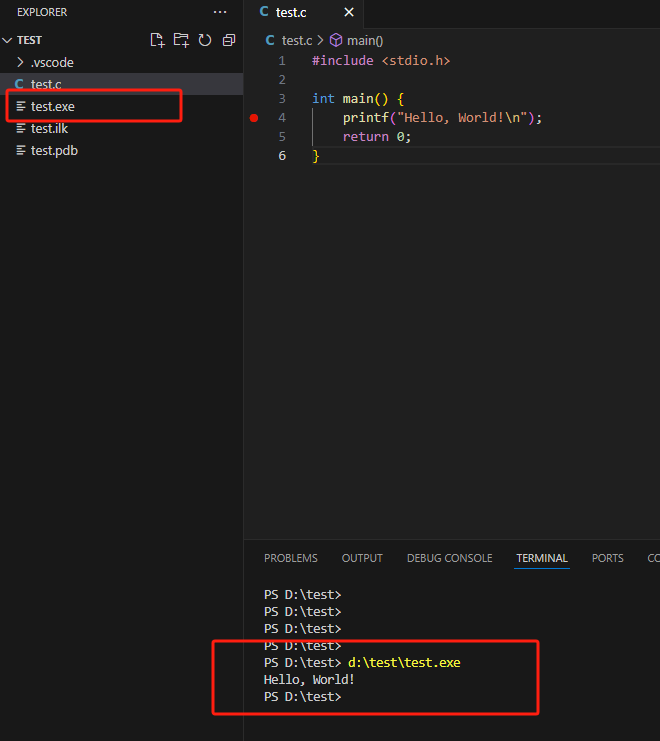
C语言基础系列【3】VSCode使用
前面我们提到过VSCode有多么的好用,本文主要介绍如何使用VSCode编译运行C语言代码。 安装 首先去官网(https://code.visualstudio.com/)下载安装包,点击Download for Windows 获取安装包后,一路点击Next就可以。 配…...

MySQL-5.7.44安装(CentOS7)
目录 1、下载安装包并解压 2、创建数据目录与日志目录 3、设置环境变量 4、刷新环境变量 5、执行初始化 6、创建配置文件目录 7、新建配置文件 8、为安装目录赋予可执行权限 9、创建服务启动脚本 10、启动服务并将启动脚本加入开机自启动 11、查看服务状态 12、创建…...

服务端与多客户端照片的传输,recv,send
一、照片传输 server.c /* * 文件名称:server.c * 创 建 者: * 创建日期:2025年02月07日 * 描 述: */ #include <stdio.h> #include <sys/types.h> /* See NOTES */ #include <sys/socket.h…...

JS实现灯光闪烁效果
在 JS中,我们可以实现灯光闪烁效果,这里主要用 setInterval 和 clearInterval 两个重要方法。 效果图 源代码 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><title>灯闪烁效果<…...

SpringCloud面试题----Nacos和Eureka的区别
功能特性 服务发现 Nacos:支持基于 DNS 和 RPC 的服务发现,提供了更为灵活的服务发现机制,能满足不同场景下的服务发现需求。Eureka:主要基于 HTTP 的 RESTful 接口进行服务发现,客户端通过向 Eureka Server 发送 HT…...

verilog练习:i2c slave 模块设计
文章目录 前言1. 结构2.代码2.1 iic_slave.v2.2 sync.v2.3 wr_fsm.v2.3.1 状态机状态解释 2.4 ram.v 3. 波形展示4. 建议5. 资料总结 前言 首先就不啰嗦iic协议了,网上有不少资料都是叙述此协议的。 下面将是我本次设计的一些局部设计汇总,如果对读者有…...
)
3.5 Go(特殊函数)
目录 一、匿名函数 1、匿名函数的特点: 2、匿名函数代码示例 2、匿名函数的类型 二、递归函数 1. 递推公式版本 2. 循环改递归 三、嵌套函数 1、嵌套函数用途 2、代码示例 3、作用域 & 变量生存周期 四、闭包 1、闭包使用场景 2、代码示例 五、De…...

Android的MQTT客户端实现
在 Android 平台上实现 MQTT 客户端的完整技术方案,涵盖基础实现、安全连接、性能优化和最佳实践: 一、技术选型与依赖配置 推荐库 Eclipse Paho Android Service(官方维护,支持后台运行) gradle 复制 // build.gradl…...
)
用51单片机和HC-SR04超声波模块DIY一个倒车雷达(附完整代码和立创EDA原理图)
51单片机与HC-SR04超声波模块实战:打造高精度倒车雷达系统 在汽车电子和智能硬件领域,倒车雷达作为基础安全装置,其DIY实现不仅能帮助理解超声波测距原理,更是掌握嵌入式系统开发的绝佳实践。本文将手把手教你使用经典的STC89C52单…...

线程化笔记工具:重塑深度思考与知识管理的技术实践
1. 项目概述:一个为线程化思考而生的笔记工具最近在折腾个人知识管理工具时,发现了一个挺有意思的开源项目:alishobeiri/thread-notebook。乍一看名字,可能会以为是又一个普通的Markdown笔记本应用。但深入使用后,我发…...
)
从图片到摄像头:用YOLOv8n.pt模型在Win10上实现实时目标检测(代码+命令详解)
从图片到摄像头:用YOLOv8n.pt模型在Win10上实现实时目标检测(代码命令详解) 当计算机视觉遇上边缘计算,目标检测技术正在重塑人机交互的边界。YOLOv8作为当前最先进的实时检测框架之一,其轻量级版本yolov8n.pt在普通消…...

基于Taotoken统一API开发支持多模型切换的智能对话应用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 基于Taotoken统一API开发支持多模型切换的智能对话应用 应用场景类,场景是开发一个需要支持用户自由选择或系统自动切换…...
基于PWM舵机与NeoPixel的万圣节互动蝙蝠制作全解析
1. 项目概述:一个会动的万圣节蝙蝠又快到万圣节了,想给家里的装饰来点不一样的“活物”吗?每年都摆静态的南瓜灯和蜘蛛网,总觉得少了点气氛。今年我琢磨着,不如自己动手做一个能扑腾翅膀、眼睛还会发光的机械蝙蝠&…...

WELearn网课助手完整指南:5大核心功能彻底解放你的英语学习时间
WELearn网课助手完整指南:5大核心功能彻底解放你的英语学习时间 【免费下载链接】WELearnHelper 显示WE Learn随行课堂题目答案;支持班级测试;自动答题;刷时长;基于生成式AI(ChatGPT)的答案生成 项目地址: https://g…...

AI智能体分类学:从原理到实践,构建高效Agent系统的设计指南
1. 项目概述与核心价值最近在折腾AI智能体(Agent)相关的项目,发现一个挺有意思的现象:大家聊起Agent,要么是“它能帮我写代码”,要么是“它能自动处理客服”,但很少有人能系统地说清楚ÿ…...

ARM Cortex-A5 SCU架构与多核缓存一致性解析
1. ARM Cortex-A5 SCU架构解析SCU(Snoop Control Unit)是Cortex-A5多核处理器中的关键组件,主要负责维护多核间的缓存一致性。当某个CPU核心修改了共享内存区域的数据时,SCU会自动通知其他核心的缓存进行更新或失效操作。这种机制…...

长期使用后回顾,Taotoken账单明细对项目财务核算的实际帮助
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用后回顾,Taotoken账单明细对项目财务核算的实际帮助 对于一个持续数月、深度依赖大模型能力的项目组而言&#…...

交通一线运维优选:Smart-S3 多模光时域反射仪
铁路、高速公路现场运维常需轻便、快速、易用的光纤检测工具,Smart-S3 多模光时域反射仪以超轻机身和稳定性能,成为一线巡检与抢修的理想选择。Smart-S3 多模光时域反射仪是一款便携式光纤测试仪表,可精准测量光缆长度、损耗、故障点位置&…...