docker 进阶命令(基于Ubuntu)
数据卷 Volume: 目录映射, 目录挂载
匿名绑定:
匿名绑定的 volume 在容器删除的时候, 数据卷也会被删除, 匿名绑定是不能做到持久化的, 地址一般是 /var/lib/docker/volumes/xxxxx/_data
绑定卷时修改宿主机的目录或文件, 容器内的数据也会同步修改, 反之亦然
# 查看所有 volume
docker volume ls# 用法: -v [容器内目录] 仅仅指定容器内的目录, 不指定宿主机的目录, 默认会自动创建一个匿名卷
docker run -d -p 80:80 --rm --name nginx_volume01 -v /usr/share/nginx/html nginx# 查看卷详情
docker inspect nginx_volume01 # 里面 Mounts 的关键词就是 映射卷信息
docker volume ls
具名绑定:
具名绑定与匿名绑定是类似的, 只是具名绑定会指定一个名字, 具名绑定卷在容器删除的时候, 数据卷不会删除, 具名绑定是可以做到持久化的, 路径一般是 /var/lib/docker/volumes/xxxxx/_data
# 用法: -v [卷别名]:[容器内目录] 指定卷名和容器内的目录, 创建后由docker统一管理
docker run -d -p 80:80 --rm --name nginx_volume02 -v nginx_test:/usr/share/nginx/html nginx# 查看卷详情
docker inspect nginx_volume02
docker volume ls # 会查到一个名字为 nginx_test 的卷# 重新创建新的容器并使用持久化挂载卷
## 先进行删除
docker stop nginx_volume02
docker rm nginx_volume02## 重新创建新的容器并使用持久化挂载卷
docker run -d -p 80:80 --rm --name nginx_volume -v nginx_test:/usr/share/nginx/html nginx## 查看
docker inspect nginx_volume
docker volume ls
Bing Mount:
前面两种方式都是docker内部自动管理这些卷的, 但是bing mount是手动管理这些卷的, 也就是手动指定宿主机的目录和容器内的目录
# 用法: -v [宿主机的目录]:[容器内的目录] 指定宿主机的目录和容器内的目录
# 可以映射多个目录, 一个 -v 只能映射一个目录, 多个目录需要多个 -v
docker run -d -p 80:80 --rm --name nginx_volume03 -v /root/projects/www/nginx_test:/usr/share/nginx/html nginx# 查看卷详情
docker inspect nginx_volume03
docker volume ls
volume 的常用命令
# 查看帮助
docker volume --help# 列出所有 volume
docker volume ls# 查看卷详情
docker volume inspect [卷名]# 删除一个 volume
docker volume rm [卷名]# 清理无用的 volume
docker volume prune
网络配置 Network
- 提供了多种模型, 可以定制化为每个容器制定不同的网络
- 自定义网络模式, 划分不同的子网以及网关, dns等配置
- 网络互通
- 实现不同子网之间的网络互通
- 基于容器名(主机名)的方式在网络内访问
网络模式
bridge 模式 (桥接模式), 默认使用
在主机中创建一个 docker0 的虚拟网桥(虚拟交换机), 在 docker0 创建一对虚拟网卡, 有一半在宿主机上 vethxxxx, 还是一半在容器内 eth0

bridge 模式 容器互联通信
# 启动两个容器, 用于测试两个容器之前的通信
docker run -d -P --rm --name centos_network1 centos tail -f /dev/null
## tail -f /dev/null 是让容器启动时运行的命令, 为了让容器一直运行, 不退出# 使用 --link 参数, 让两个容器之间建立连接
docker run -d -P --rm --name centos_network2 --link centos_network1 centos tail -f /dev/null# 测试两个容器是否可以通信
docker exec -it centos_network2 ping centos_network1 # 由于 centos_network2 link centos_network1, 所以可以通信
docker exec -it centos_network1 ping centos_network2 # 但是 centos_network1 不能 ping centos_network2, 因为 --link 参数是单向的# 参看容器的详细信息
docker inspect centos_network1
docker inspect centos_network2
host 模式 (主机模式)
容器将不会获得一个独立的网络命名空间, 而是和宿主机共享网络命名空间, 容器将不会虚拟出自己的网卡以及配置自己的 IP 等, 那么基于该模式启动的容器对应的ip实际就是与宿主机同一个子网, 同一个网段
192.168.113.1 --> 192.168.113.x

none 模式
docker 会拥有自己的网络空间, 不与宿主机共享, 在这个网络模式下的容器, 不会被分配网卡 ip 路由等相关信息
特点: 完全隔离, 与外部任何机器都无网络访问, 只有自己的本地网络lo网卡, 即127.0.0.1

container 模式
新建的容器和已经存在的一个容器共享一个网络命名空间, 新的容器不会创建自己的网卡以及配置自己的 IP, 而是和指定的容器共享 IP, 端口范围等. 同样, 新的容器也不能访问已经存在的容器, 两者除了网络方面, 其他方面都是独立的

自定义网络模式(推荐)
不使用docker自带的网络模式, 而是自己去定制化自己特有的网络模式, 比如划分不同的子网, 网关, dns等配置
- 自定义网络模式, 划分不同的子网以及网关, dns等配置
- 网络互通
- 实现不同子网之间的网络互通
- 基于容器名(主机名)的方式在网络内访问
自定义网络创建
- 查看主机的网络
# 查看网络的命令
ifconfig
# 或
ip addrdocker network [Command]
# 如:
docker network --help
docker network ls
- 创建自定义网络
# 创建自定义网络
docker network create --help## 创建一个名为 wolfcode的网络, 子网为 192.168.30.0/24, 网关为 192.168.30.1
docker network create --driver bridge --subnet 192.168.30.0/24 --gateway 192.168.30.1 wolfcode
# --driver bridge 指定网络模式为 bridge 模式, docker默认就是 bridge 模式, 可以不写
# --subnet 192.168.30.0/24 指定子网, 桥接模式可以自定义, 但注意子网尽量不要和宿主机的子网冲突(可以使用 ifconfig/ip addr 查看宿主机的子网)
# --gateway 192.168.30.1 指定网关, 网关的ip地址需要和子网在同一个网段
# wolfcode 自定义网络名称# 查看网络是否在里面
docker network ls# ifconfig 或 ip addr 也可以查看网络
ifconfig
# 或
ip addr
- 自定义网络启动容器
# 启动一个 nginx 容器, 指定网络为 wolfcode
docker run -d -p 3001:80 --rm --name nginx_network1 --net wolfcode nginx
## --net wolfcode 指定网络模式为使用自定义的 wolfcode 网络
## 启动容器时指定网络 --net# 查看容器网络详情
docker inspect nginx_network1# 进入容器内部看网络相关的信息
docker exec -it nginx_network1 /bin/bash
ip addr
## 有些容器没有 ip addr 命令, 可以使用参看 hosts 文件的方式查看容器内部的主机名对应的ip地址是否与自定义网络配置一致
cat /etc/hosts
容器互联通信
# 启动两个 centos 容器, 指定网络为 wolfcode, 测试容器之间是否可以相互通信
docker run -d -P --rm --name centos_network1 --net wolfcode centos tail -f /dev/null
docker run -d -P --rm --name centos_network2 --net wolfcode centos tail -f /dev/null
## -P 随机端口映射
## --net wolfcode 指定网络模式为使用自定义的 wolfcode 网络
## centos 是镜像名称
## tail -f /dev/null 是为了让容器一直运行, 否则容器会自动停止# 查看容器的网络详情
docker inspect centos_network1
docker inspect centos_network2# 进入容器内部看网络相关的信息
docker exec -it centos_network1 /bin/bash
cat /etc/hosts
## 192.168.30.2 centos_network1# 也可以使用 ifconfig 或 ip addr 查看网络信息
ifconfig
# 或
ip addr# 在 centos_network1 容器内部 ping centos_network2, 测试容器之间是否可以基于主机名相互通信
ping centos_network2# 也可以直接使用docker exec -it 使用容器执行ping命令
docker exec -it centos_network1 ping centos_network2
## ping centos_network2 是ping centos_network2 的主机名, 而不是ip地址, 测试容器之间是否可以基于主机名进行通信
不同网络下容器互相通信

测试: 默认的bridge网络容器和自定义的wolfcode网络容器通信问题
# 使用不同的两个网络模式启动两个容器, 测试容器之间是否可以相互通信
# 启动一个 centos 容器, 默认网络为 bridge
docker run -d -P --rm --name centos_network1 centos tail -f /dev/null# 启动一个 centos 容器, 自定义网络为 wolfcode
docker run -d -P --rm --name centos_network2 --net wolfcode centos tail -f /dev/null# 查看容器的网络详情
docker inspect centos_network1
docker inspect centos_network2# 尝试 centos_network2 去 ping centos_network1, 测试容器之间是否可以相互通信
docker exec -it centos_network1 ping centos_network2
## 或
docker exec -it centos_network1 ping 192.168.30.2
## 结果: 两种方式都无法ping通, 因为两个容器不在同一个网络下, 无法相互通信
解决方案: docker network connect
# 将 centos_network1 容器连接到 wolfcode 网络下
docker network connect wolfcode centos_network1# 查看容器的网络详情
docker inspect centos_network1
docker inspect centos_network2# 尝试 centos_network2 去 ping centos_network1, 测试容器之间是否可以相互通信
docker exec -it centos_network1 ping centos_network2
## 或
docker exec -it centos_network1 ping 192.168.30.2
## 结果: 可以ping通, 因为两个容器在同一个网络下, 可以相互通信
Dockerfile
Dockerfile 常见的命令
dockerfile 官方文档
FROM: 指定基础镜像
在 Dockerfile 中,FROM 是指定基础镜像的指令,也是所有 Dockerfile 的开头命令。该命令用于设置构建镜像所依赖的基础镜像。
细节和用法说明
-
功能:
- 指定当前镜像所基于的基础镜像。
- 基础镜像必需是 Docker Hub 上的公开镜像或自定义镜像仓库中的镜像。
- Dockerfile 中每个阶段的多阶段构建可以有多个
FROM,但每个阶段只能有一个FROM。
-
语法:
- 基础语法:
FROM <镜像名>[:<版本标识>] [AS <阶段名称>]
- 基础语法:
-
示例:
-
指定 CentOS 7 为基础镜像:
FROM centos:7 -
指定 Ubuntu 最新版本为基础镜像(
latest是默认标签):FROM ubuntu -
使用多阶段构建(命名阶段):
FROM node:16 AS builder RUN npm install
-
MAINTAINER: 指定镜像的作者
MAINTAINER 是 Dockerfile 中的旧指令,用于声明镜像创建者的信息(比如姓名和邮箱)。不过这个指令已经被弃用,建议使用 LABEL 指令来代替。
细节和用法说明
-
功能:
- 指定镜像的维护者,方便镜像的使用者进行联系或了解镜像作者信息。
- 建议使用
LABEL maintainer="作者信息"来替代。
-
语法:
MAINTAINER <作者信息> -
示例:
-
使用
MAINTAINER指令指定作者名与邮箱:MAINTAINER wolfcode <wolfcode@wolfcode.cn> -
替代写法(推荐):
LABEL maintainer="wolfcode <wolfcode@wolfcode.cn>"
-
LABEL: 指定镜像的标签元数据
LABEL 指令用于为镜像添加描述性元数据,如版本、作者、描述信息等。
细节和用法说明
-
功能:
LABEL为镜像添加键值对类型的元数据。- 可以为镜像添加多条
LABEL信息,也可以在一条LABEL指令中定义多个键值对。
-
语法:
-
单条
LABEL语法:LABEL <key>=<value> -
多条
LABEL:LABEL <key1>=<value1> <key2>=<value2> -
推荐换行书写:
LABEL key1=value1 \key2=value2 \key3=value3
-
-
示例:
-
添加版本和描述信息:
LABEL version="1.0" LABEL description="This is a test Dockerfile" -
使用换行格式:
LABEL version="1.0" \description="This is a test" \maintainer="Name <name@example.com>"
-
ENV: 在容器中设置环境变量
ENV 指令用于在容器构建过程中设置环境变量。设置的变量可以在运行时通过 $NAME 引用,也会影响到所有后续的指令。
细节和用法说明
-
功能:
- 在容器中设置环境变量,让变量可以在整个容器内被引用或用作配置参数。
- 允许在执行指令时引用环境变量,例如设置
PATH。
-
语法:
-
设置单个环境变量:
ENV <key> <value> -
设置多个环境变量:
ENV key1=value1 key2=value2 ...
-
-
示例:
-
设置
JAVA_HOME和更新PATH:ENV JAVA_HOME /usr/local/java/jdk1.8.0_181 ENV PATH $PATH:$JAVA_HOME/bin -
一次性设置多个变量:
ENV JAVA_HOME=/usr/lib/java PATH=$PATH:$JAVA_HOME/bin -
在运行时可通过
echo查看:docker run --rm my-image bash -c "echo $JAVA_HOME"
-
RUN: 容器中执行 Shell 命令
RUN 指令用于在镜像构建过程中执行命令。每个 RUN 都会创建一个新的镜像层。
细节和用法说明
-
功能:
- 在镜像构建过程中执行命令,例如安装依赖、修改配置文件等。
- 可以通过 shell 或 exec 形式运行指令。
-
语法:
-
Shell 形式(默认):
RUN <command> -
Exec 形式(推荐,当需要精确控制参数时):
RUN ["<executable>", "<param1>", "<param2>", ...]
-
-
示例:
-
使用 yum 安装
vim:RUN yum install -y vim -
执行多个命令:
RUN mkdir -p /app && cd /app && touch test.txt -
使用 Exec 形式:
RUN ["apt-get", "install", "-y", "curl"]
-
ADD: 复制并自动解压文件
ADD 指令用于将宿主机的文件复制到容器中,同时支持自动解压(比如 zip)。ADD 可以从 URL 下载资源。
细节和用法说明
-
功能:
- 将本地或远程文件添加到镜像中。
- 如果源为压缩文件(如
.tar.gz),会自动解压到目标路径。
-
语法:
ADD <src> <dest> -
示例:
- 单文件复制:
ADD ./data.txt /app/ - 自动解压
zip文件:ADD ./data.zip /app/
- 单文件复制:
COPY: 纯粹复制文件(不会解压)
COPY 是用于将主机上的文件和目录复制到镜像中,与 ADD 类似,但不支持 URL 或解压功能。
细节和用法说明
-
功能:
- 将本地文件复制到镜像中,简单且纯粹,不提供额外解压功能。
-
语法:
COPY <src> <dest> -
示例:
COPY ./data.txt /app/
WORKDIR: 指定工作目录
WORKDIR 用于设置容器中的工作目录。如果路径不存在,会自动创建。
细节和用法说明
-
功能:
- 指定接下来指令的工作目录(如
COPY、RUN等)。
- 指定接下来指令的工作目录(如
-
语法:
WORKDIR /path/to/dir -
示例:
WORKDIR /app RUN touch file.txt
VOLUME:
在 Dockerfile 中,VOLUME 指令用于声明一个或多个可以挂载数据的挂载点(Mount Point),这些挂载点对应于容器中的目录。通过使用 VOLUME,你可以确保这些目录中的数据可以被独立保存,即使容器被移除,数据仍然可以持久化。
细节和用法说明
-
功能:
- 它在容器运行时定义了一个挂载点。注意,
VOLUME指令本身并不会把宿主机的路径挂载到容器中,而是告诉 Docker,这些指定的路径应该被挂载为匿名卷。 VOLUME声明的目录默认会生成一个 Docker 卷,并将其挂载到容器中指定的路径。- 后续在
docker run阶段,你可以通过-v或--mount参数,将自定义的宿主机目录挂载到这些挂载点来覆盖 Docker 默认生成的卷。
- 它在容器运行时定义了一个挂载点。注意,
-
语法:
- 单路径声明:
VOLUME <路径> - 多路径声明(以空格分隔):
VOLUME <路径1> <路径2> ... - JSON 数组形式声明:
VOLUME ["<路径1>", "<路径2>", ...]
# 单路径声明 VOLUME /data# 多路径声明 VOLUME /data1 /data2# 使用 JSON 数组形式 VOLUME ["/data", "/data2"] - 单路径声明:
-
运行时挂载:
- 当你在 Dockerfile 中使用
VOLUME后,如果运行容器时没有特别指定挂载点(未使用-v或--mount参数),Docker 会自动为这些路径创建匿名卷(Anonymous Volumes)。这些卷存储的数据会被独立保存,并不依赖容器的生命周期。 - 如果运行容器时使用
-v <主机目录>:<容器目录>或--mount,你可以将宿主机目录挂载到VOLUME声明的路径中。
- 当你在 Dockerfile 中使用
-
注意事项
-
镜像构建阶段不能往 VOLUME 声明的路径写入文件:
- 在 Dockerfile 中,一旦路径被
VOLUME声明后,在后续的构建中,无法再对这些路径写入文件,因为这些路径的数据源已经被抽象为外部卷。
- 在 Dockerfile 中,一旦路径被
-
使用默认匿名卷可能会增加清理复杂性:
- 如果你不明确指定挂载路径,Docker 会创建匿名卷,并可能随着容器增多而占用存储空间。因此,推荐在
docker run阶段明确指定宿主机路径或命名卷,避免创建难以管理的匿名卷。
- 如果你不明确指定挂载路径,Docker 会创建匿名卷,并可能随着容器增多而占用存储空间。因此,推荐在
-
-
简单示例分析
Dockerfile
FROM ubuntu:latest
VOLUME /data
CMD ["echo", "Data Volume Example!"]
构建镜像
docker build -t volume-example .
默认情况下运行容器
docker run --name my-container volume-example
- 此时 Docker 会为
/data路径自动创建匿名卷进行挂载。 - 可以通过以下命令查看卷:
docker inspect my-container
自定义挂载:
docker run --name custom-container -v /my/local/path:/data volume-example
- 此时
/my/local/path(宿主机目录)会挂载到容器中的/data路径。
EXPOSE: 指定容器暴露的端口
在 Dockerfile 中,EXPOSE 指令用于声明容器对外暴露的端口,以便外部与容器进行网络通信。EXPOSE 声明的端口并不会自动映射到宿主机,需要运行时通过 -p 标志手动指定映射规则。
细节和用法说明
-
功能:
- 定义运行容器时的监听端口(仅声明作用,未做实际端口映射)。
- 容器启动后,通过运行参数与宿主机的端口进行映射。
-
语法:
EXPOSE <端口号> EXPOSE <端口号>/<协议> # 可选协议为 TCP 或 UDP,默认为 TCP -
示例:
-
声明容器监听的 8080 端口(TCP 协议):
EXPOSE 8080 -
声明容器同时监听 TCP 和 UDP 协议的 8080 端口:
EXPOSE 8080/tcp EXPOSE 8080/udp
-
-
运行时端口映射:
- 手动将容器暴露的端口与宿主机端口绑定:
上述命令会将宿主机的 8080 端口映射到容器监听的 8080 端口。docker run -p 8080:8080 my-image
- 手动将容器暴露的端口与宿主机端口绑定:
CMD: 指定容器启动时执行的默认命令
CMD 指令用于在容器启动时指定默认执行的命令。如果使用 docker run 时传入其他命令,CMD 指定的命令将被覆盖。
细节和用法说明
-
功能:
- 为容器启动执行一个默认的命令和参数。
- 如果 Dockerfile 中有多个
CMD指令,只有最后一个生效。 CMD是运行时命令,而非构建镜像时的命令。
-
语法:
-
Shell 形式:
CMD <command> -
Exec(数组)形式(推荐):
CMD ["executable", "参数1", "参数2", ...] -
与
ENTRYPOINT联合使用:CMD ["参数1", "参数2", ...]
-
-
示例:
-
使用 Shell 形式:
CMD ls -al -
使用 Exec(数组)形式:
CMD ["ls", "-al"] # 或者 CMD ["sh", "-c", "ls -al"] -
输出信息:
CMD echo "hello, docker"
-
ENTRYPOINT: 执行容器的入口点命令
ENTRYPOINT 指令用于定义容器启动时的主程序(不可覆盖)。如果运行时希望加入额外参数,可以与 CMD 配合使用。
细节和用法说明
-
功能:
- 用于定义容器启动时的固定命令,并以其作为入口点。
- 可以和
CMD联合使用,固定的部分由ENTRYPOINT定义,动态参数由CMD定义。
-
语法:
-
Exec(数组)形式(推荐):
ENTRYPOINT ["executable", "参数1", "参数2", ...] -
Shell 形式:
ENTRYPOINT <command>
-
-
示例:
-
固定使用
echo执行输出命令:ENTRYPOINT ["echo", "Hello"] # 或者 ENTRYPOINT ["sh", "-c", "echo Hello"] -
配合
CMD使用:ENTRYPOINT ["python3"] CMD ["app.py"]- 启动容器时将最终运行:
python3 app.py
- 启动容器时将最终运行:
-
USER: 指定容器内的用户
USER 指令用于指定容器内后续指令的执行用户,默认用户为 root。
细节和用法说明
-
功能:
- 更改构建和运行容器时的用户和用户组。
- 以非
root用户运行容器可以提升安全性。
-
语法:
USER <用户名>[:<用户组>] -
示例:
-
切换为
nobody用户:USER nobody -
设置用户和用户组:
USER stu:group1
-
ARG: 构建参数
ARG 指令用于声明镜像构建时可用的变量,这些变量仅在构建过程中有效,不会包含在最终镜像中。
细节和用法说明
-
功能:
- 定义 Dockerfile 构建过程中的参数,可用于动态化构建。
-
语法:
ARG <参数名>[=<默认值>] -
示例:
- 定义默认值:
ARG VERSION=1.0 RUN echo $VERSION - 构建镜像时通过
--build-arg修改值:docker build -t --build-arg VERSION=2.0 my_images:1.0 .
- 定义默认值:
SHELL: 自定义容器中的 shell
SHELL 用于指定构建过程中运行指令的 shell,默认情况下使用 /bin/sh -c。
细节和用法说明
-
功能:
- 更改默认的 shell。例如,使用 PowerShell 而非
/bin/sh。
- 更改默认的 shell。例如,使用 PowerShell 而非
-
语法:
SHELL ["executable", "参数1", "参数2", ...] -
示例:
-
更改为 Bash:
SHELL ["/bin/bash", "-c"] -
使用 Windows PowerShell:
SHELL ["powershell", "-command"]
-
STOPSIGNAL: 自定义容器停止信号
STOPSIGNAL 用于指定容器在停止时 Docker 向其发送的信号。
细节和用法说明
-
功能:
- 定义停止容器时应发送的信号(默认是 SIGTERM)。
- 可用信号参考:Linux Signals。
-
语法:
STOPSIGNAL <信号值> -
示例:
-
设置为 SIGKILL:
STOPSIGNAL SIGKILL -
设置为自定义信号:
STOPSIGNAL 9
-
HEALTHCHECK: 容器健康检查
HEALTHCHECK 指令用于定义容器内某个服务或应用的健康检查机制,确保容器的状态可以被 Docker 监控。当容器运行时,Docker 会根据 HEALTHCHECK 的结果判断容器的健康状态,并标记为 healthy(健康)、unhealthy(不健康)、或 starting(检查未完成)。
细节和用法说明
-
功能:
- 定义容器运行时的健康检查逻辑,例如通过 HTTP 请求或执行命令的结果判断服务状态。
- 健康检查会影响容器的状态,当服务出现异常时,容器的状态会变为
unhealthy。
-
语法:
# 配置健康检查 HEALTHCHECK [选项] CMD <命令> # 禁用健康检查 HEALTHCHECK NONE- 选项:
--interval=<时间>:设置检查的时间间隔,默认为30s。--timeout=<时间>:设置检查命令的超时时间,默认为30s。--start-period=<时间>:设置健康检查开始前的宽限期,允许容器启动所需时间。--retries=<次数>:设置健康检查重试次数,默认为3。
- 选项:
-
命令返回规则:
- 返回值为
0:健康(healthy)。 - 返回值为非
0:不健康(unhealthy)。 - 超时或未响应:不健康(
unhealthy)。
- 返回值为
-
示例:
-
使用
curl检查 HTTP 服务是否正常:HEALTHCHECK --interval=5m --timeout=3s --start-period=30s --retries=3 \CMD curl -f http://localhost:8080/ || exit 1- 每隔 5 分钟检查一次容器内的 HTTP 服务(超时为 3 秒,启动宽限期 30 秒,重试 3 次)。
- 如果服务未响应或返回错误状态码(非 2xx),容器会被标记为
unhealthy。
-
检查 MySQL 服务是否就绪:
HEALTHCHECK CMD mysqladmin ping -h localhost || exit 1 -
禁用健康检查:
HEALTHCHECK NONE
-
构建镜像
- docker commit 方式
必须基于现有的容器进行修改, 然后提交为新的镜像
# 基础结构
docker commit [OPTIONS] CONTAINER [REPOSITORY[:TAG]]# OPTIONS 说明
## -a : 在commit时的作者
## -c : 使用dockerfile指令创建镜像
## -m : 在commit时的说明文字
## -p : 在commit时暂停容器运行
# 如:
docker commit -m "提交的描述信息" -a "作者" 容器id/容器名 镜像名:标签# 首先, 启动一个容器
docker run --rm -d -p 3001:80 --name nginx_commit nginx# 进入容器内部, 修改容器内容
docker exec -it nginx_commit /bin/bash
## 修改nginx的默认首页内容
echo "hello, nginx commit" > /usr/share/nginx/html/index.html# 提交修改后的容器为新的镜像
docker commit -m "simple test docker commit" -a "wolfcode" nginx_commit mynginx_commit:1.0# 查看镜像
docker images# 启动新的镜像
docker run --rm -d -p 3002:80 mynginx_commit:1.0
## 访问 http://localhost:3002/ 可以看到修改后的内容
- docker build 方式
# 基础结构
docker build -t [OPTIONS] 镜像名:标签 Dockerfile路径/.
# 常用的 OPTIONS 说明
## --build-arg=[] : 设置镜像创建时的变量# 如:
docker build -t mynginx:1.0 .# 查看镜像
docker images
示例1:
# 首先加入当前镜像的基础镜像
FROM python:3.10WORKDIR /appCOPY ./requirements.txt .
COPY ./simple_fastapi.py .RUN pip3 install -r requirements.txtEXPOSE 8040CMD ["python","simple_fastapi.py"]
构建镜像:
docker build -t myfastapi:1.0 .
构建自己的docker仓库Registry
阿里云容器镜像服务个人仓库
- 阿里云容器镜像服务
- 阿里云容器镜像服务帮助文档
可以自己先创建一个命名空间与镜像仓库, 阿里云会自动给出 login pull push 的方法

使用 Nexus 镜像仓库
# 创建一个 nexus 持久化目录
mkdir -p ~/docker_test/nexus
# 开放权限, 防止docker内的用户没有操作权限
chmod 777 ~/docker_test/nexus# 启动 nexus 的容器
docker run -d --restart=always -p 3005:8081 \-p 3006:5000 \-p 3007:5001 --name nexus -v ~/docker_test/nexus:/nexus-data \-e http_proxy=http://10.0.xx.xx:7892 \-e https_proxy=http://10.0.xx.xx:7892 \sonatype/nexus3# 访问 http://localhost:3005/ 可以看到 nexus 的界面
# pull/push
# 待更...
使用 Harbor 镜像仓库
使用harbor必须要先安装 docker 与 docker-compose
待更…
Docker Compose
容器编排: 管理多个容器的生命周期, 并保证它们之间的依赖关系
副本数控制: 容器有时候需要启动多个副本集群, 保证高可用, 快速对容器集群进行弹性伸缩
配置共享: 容器集群中, 需要共享一些配置文件, 如数据库配置, redis配置等

官方文档: docker-compose 官方文档
Services 相关
见官方文档
Networks 相关
见官方文档
Volumes 相关
见官方文档
Build 相关
docker-compose 可以利用 docker-compose.yml 文件中的 build 字段来构建镜像(代替 docker build -t 命令), 构建镜像的上下文默认为 docker-compose.yml 文件所在的目录
详情见上文compose官方文档
services:service_1:image: example/webappbuild: ./webapp# 常用的方式# build上下文为当前目录下的backend目录, Dockerfile为backend目录下的Dockerfileservice_2:image: example/databasebuild:context: ./backendservice_3:image: example/databasebuild:context: ./backenddockerfile: ../backend.Dockerfileservice_4:build: ~/custom
使用 docker-compose 的示例
首先写一个 docker-compose.yml 文件
services:# 定义一个服务service_1:# 定义镜像名image: "nginx"# # 定义容器名# container_name: "nginx_compose"# 定义端口映射ports:- "3010-3020:80"# 定义网络networks:- wolfcode_net# 定义环境变量environment:- ENV_VAR_1=VALUE_1- ENV_VAR_2=VALUE_2# # 定义依赖# depends_on:# - service_2# 定义重启策略restart: "always"# 定义挂载目录volumes:- type: volumesource: nginx_compose_testtarget: /usr/share/nginx/htmlnetworks:# 自动创建一个网络 wolfcode_net wolfcode_net:name: wolfcode_netdriver: bridgeipam:driver: defaultconfig:- subnet: 192.188.0.0/16gateway: 192.188.0.1volumes:nginx_compose_test:name: nginx_compose_test
使用 docker-compose config 验证配置文件格式是否正确
docker-compose 命令通常有一个前提, 就是执行命令时, 当前目录必须在 docker-compose.yml 文件的目录下
docker-compose config
使用 docker-compose up 启动服务
docker-compose 命令通常有一个前提, 就是执行命令时, 当前目录必须在 docker-compose.yml 文件的目录下
更多命令见: docker-compose 命令 CLI
# 启动与创建服务
# 当修改了docker-compose.yml的配置, docker-compose up -d 也可以用于更新服务
docker-compose up -d
## 仅仅创建服务, 不启动
docker-compose create # 根据当前目录下的 docker-compose.yml 文件创建所有的服务, 但是不启动
### 注意: create 后跟的是服务名, 而不是容器名, 下面的命令同理
docker-compose create 服务名 # 根据当前目录下的 docker-compose.yml 文件创建指定的服务, 但是不启动# 查看服务状态
docker-compose ps
docker-compose ps -a
docker-compose images
docker-compose ls# 停止服务
docker-compose stop # 停止服务, 但是不删除容器
docker-compose stop 服务名 # 停止指定的服务, 但是不删除容器# 启动服务
docker-compose start # 启动服务
docker-compose start 服务名 # 启动指定的服务# 删除服务
docker-compose down --help
docker-compose down # 删除所有服务 容器 网络, 但是不删除挂载的目录
docker-compose down -v # 删除所有服务 容器 网络, 同时删除挂载的目录
docker-compose down 服务名 # 删除指定的服务, 但是不删除挂载的目录
使用docker-compose 完成弹性伸缩
# 注意: scale 后跟的是服务名, 而不是容器名
# 该命令会自动停止现有的服务, 并启动新的服务
docker-compose up -d --scale 服务名=副本数docker-compose up -d --scale service_1=3
docker-compose up -d --scale service_1=2
docker-compose up -d --scale service_1=5
使用 docker-compose logs 查看日志
# 查看服务日志
docker-compose logs
docker-compose logs -f
docker-compose logs -f 服务名
Docker Swarm

在 Docker Swarm 集群中,不同节点需要通过内部的网络协议进行通信,以实现集群管理、服务分发以及任务调度等功能。为了确保通信正常,您需要开放一系列特定的端口。这些端口包括 Swarm 自身的管理、集群节点间的网络通信,以及应用服务所需要暴露的端口。
| 端口 | 原因/必要性 |
|---|---|
| 2377/TCP | 用于 Swarm 集群管理(加入或离开节点)。 |
| 7946/TCP | 用于 Manager 节点间的状态同步和心跳。 |
| 7946/UDP | 用于服务调度的 Gossip Protocol(群组通信协议)。 |
| 4789/UDP | 支持 Overlay 网络,确保服务(例如容器之间)在不同节点上的网络通信。 |
| 服务端口 | Manager 节点上运行的服务所需要暴露的端口(如 3000:80、80:80 等,由具体服务配置决定)。 |
端口开启后, 需要重启 docker 服务才能生效: sudo systemctl restart docker
swarm 基本概念
首先,Docker Swarm 是什么?
Docker Swarm 是一个用于管理和编排 Docker 容器的集群工具,它允许我们在多个主机上运行容器,就像运行在一台机器上的容器一样简单,并集成了基本的负载均衡功能。
-
swarm : 集群的管理和编排
docker swarm --help -
node : 集群中的docker 节点, 类似于 k8s 的 node 节点, 分为 manager 和 worker
-
service : 服务(Services) 是指的是一组任务的集合, 服务定义了任务的属性. 服务有两种模式:
- replicated services : 基于指定副本数量进行任务调度
- global services : 每个节点都运行一个任务
两种模式通过docker service create 的 --mode 参数指定

-
task : Task 是 Swarm 中的最小的调度单位, 目前来说就是一个单一的容器, 类似于 k8s 的 pod 中的容器
集群搭建
准备3台云服务器用于测试, 一个manager, 两个worker node, 3台服务器都安装了 docker, 并开启了上文中的端口
- 初始化集群
docker swarm --help# 初始化集群, 并将当前节点设置为 manager 节点
docker swarm init --advertise-addr <MANAGER-IP> # <MANAGER-IP> 是当前节点的 IP 地址
# 如:
docker swarm init --advertise-addr 119.3.xxx.xxx# 运行完成后, 会返回一个 node token 命令, 用于 worker 节点加入集群
# 格式大概为:
# docker swarm join --token SWMTKN-1-5jz0q4z7jz0q4z7jz0q4z7jz0q4z7jz0q4z7jz0q4z7jz0q4z7jz0q4z7jz0q4z7j 119.3.xxx.xxx:2377# 在另外两个 worker 节点上运行该命令即可加入集群
# 获得worker节点加入集群的token(管理节点运行命令)
docker swarm join-token worker
# 获得manager节点加入集群的token(管理节点运行命令)
docker swarm join-token manager
Warning: 不同的云服务器商私网ip(网卡eth0)之间是无法通信的, docker swarm 默认可能会把私网ip加入到 ingress网络中, 即使worker节点可以正常加入到swarm, 管理节点也可能无法发送信息到worker节点的私网ip, 造成ingress自动负载转发异常, 解决方式如下:
# docker swarm join 加入新参数 --advertise-addr 工作节点的公网ip 即可解决
docker swarm join --token xxxxxxxxxxxxxxxxxx --advertise-addr <WORKER-公网IP> <MANAGER-IP>:2377# 查看是否成功
## 工作节点:
docker info
### 内部有swarm 的信息## 查看 docker ingress 网络的配置(管理节点运行)
docker network inspect ingress
### 里面 的"Peers": 内部的信息是否正确## 查看 docker ingress 网络的配置(工作节点运行)
docker network inspect ingress
### 里面 的"Peers": 内部的信息是否正确
- 查看集群状态(管理节点运行)
docker node --help
docker node ls
docker node ps
docker node inspect <NODE-ID> # <NODE-ID> 是节点的 ID
部署服务
- 创建并启动服务
docker service --help
docker service create --help# 创建并启动服务
# 默认启用 Ingress 网络, 显式告诉 Swarm 将单独的 3000 端口暴露给集群范围, 启用 Ingress 网络,实现请求的集群范围转发。
docker service create --replicas 2 --publish 3000:80 --name nginx_swarm nginx
docker service create --replicas 2 -p 3000:80 --name nginx_swarm nginxdocker service create --replicas 2 -p 3000-3005:80 --name nginx_swarm nginx
1. Docker Swarm 的 --publish 及负载均衡机制
1.1 --publish 如何实现负载均衡?
Docker Swarm 的 --publish 参数用于将服务的容器端口暴露给外界访问,并通过 Swarm 内部的负载均衡器实现流量的自动分发。
步骤讲解:
-
创建服务并暴露端口:
- 我们通过
docker service create创建一个服务,例如运行一个nginx服务并暴露端口:docker service create --name my_service --replicas 5 --publish 8080:80 nginx--name my_service:给服务命名。--replicas 5:运行 5 个副本(即 5 个容器)。--publish 8080:80:对外暴露端口 8080,将其映射到容器内的 80 端口(nginx默认使用 80 端口)。
- 我们通过
-
服务的分布与负载:
- Swarm 会根据集群中的可用节点,把 5 个副本均匀分布到节点上(除非有节点资源不足等情况)。
- 假设有 3 台节点,服务可能会分布如下:
node-1:运行 2 个副本。node-2:运行 2 个副本。node-3:运行 1 个副本。
-
外部流量的进入:
- 外部用户通过访问集群中任意节点的 IP 和暴露的 8080 端口访问这个服务:
http://<任意节点的IP>:8080 - Docker Swarm 的负载均衡机制会将请求根据简单的轮询策略分发到服务的 5 个副本中。
- 外部用户通过访问集群中任意节点的 IP 和暴露的 8080 端口访问这个服务:
-
Ingress 网络:
- Swarm 使用一个特殊的分布式网络,叫做 Ingress 网络,来管理流量。
- 即使请求进入了一个没有直接运行副本的节点,该节点也会通过 Ingress 网络将流量转发到运行任务副本的节点。例如:
流量进入了
node-2,而副本在node-1上运行,node-2会自动将流量转发到node-1。
特点:
- 简单而透明: Swarm 用户完全不需要关心副本的具体位置,也不需额外配置负载均衡器。
- 负载分配策略: Swarm 默认采用简单的 轮询(Round-Robin) 策略,将流量依次分配到服务的多个副本。
1.2 Swarm 的优缺点
-
优点:
- 极简风格:仅需
--publish一行命令,即可实现负载均衡。 - 易用性强,适合中小型应用场景。
- 内部的集群式端口暴露(Ingress 网络)隐藏了复杂性。
- 极简风格:仅需
-
缺点:
- Swarm 的负载均衡机制较为基础,只能基于简单的轮询分配流量。
- 无法根据副本的资源消耗(如 CPU、内存)做智能调度,不适合复杂场景。
2. Kubernetes 的负载均衡机制
Kubernetes(K8s)是 Docker Swarm 的强大竞争对手,它是现代化云原生架构中的核心工具。相比 Swarm,K8s 提供了更加复杂、灵活的负载均衡机制。
2.1 Kubernetes 的负载均衡方法
在 K8s 中,负载均衡分为多个层次:
-
内部流量负载均衡:
- K8s 提供了一种叫做
ClusterIP的 “虚拟 IP” 机制,用来在服务(Service)和 Pod(容器)之间实现流量的分发。 - Service 会根据 Pod 的实际状态(健康检查的结果)动态分发流量到健康 Pod。
- K8s 提供了一种叫做
-
外部流量负载均衡:
- 在 Kubernetes 中,外部流量通常通过
NodePort或LoadBalancer类型的服务进入集群。- NodePort: 将一个节点的某个端口暴露给外界,用于接收流量。
- LoadBalancer: 使用云供应商的负载均衡器(如 AWS、GCP 的 Load Balancer)分发流量到集群节点。
- 在 Kubernetes 中,外部流量通常通过
-
高级应用:Ingress Controller
- K8s 支持使用 Ingress(基于 L7 网络协议的负载均衡)管理 HTTP 请求,通过域名、URL 路径等规则分发流量到不同服务。
2.2 Kubernetes 的优点
- 支持多层次负载均衡,从内部 IP 转发到外部代理(如 Nginx Ingress)。
- 可以扩展自定义流量转发规则,例如基于 HTTP Header 的分发。
- 能力远超 Swarm,但复杂度也更高。
- 查看集群服务状态(管理节点运行)
docker service --help
docker service lsdocker service inspect <SERVICE-ID> # <SERVICE-ID> 是服务的 ID
docker service inspect --pretty <SERVICE-ID> # <SERVICE-ID> 是服务的 ID
# --pretty 参数可以简化展示服务信息docker service logs -f <SERVICE-ID> # <SERVICE-ID> 是服务的 IDdocker service ps <SERVICE-ID> # <SERVICE-ID> 是服务的 ID# 删除服务
docker service rm <SERVICE-ID> # <SERVICE-ID> 是服务的 ID
## 验证 docker service ls# 判断某一个节点是否在集群中
## 1. 管理节点运行
docker node ls
docker node inspect <NODE-ID> # <NODE-ID> 是节点的 ID## 2. 任何节点都可以通过以下命令查看
docker info # 看看里面是否有swarm 相关的信息弹性伸缩
1. 服务更新(调整实例的个数)
# 调整服务的副本数量
docker service update --replicas 5 <SERVICE-ID/NAME> # <SERVICE-ID> 是服务的 ID
2. 调整集群的规模
# 离开swarm
## 各个节点运行
docker swarm leave --force# 加入swarm
## 获得worker节点加入集群的token(管理节点运行命令)
### docker swarm join-token worker
## 获得manager节点加入集群的token(管理节点运行命令)
### docker swarm join-token manager# 注意: --advertise-addr <WORKER-公网IP> 可以看情况加入, 原因正如上文所讲, 保证worker节点能够被manager节点找到
docker swarm join --token SWMTKN-1-4q1j0p9w6w3z9xv2v6z1q6w3z9xv2v6z1q6w3z-3j3z9xv2v6z1q6w3z9xv2v6z1q6w3z --advertise-addr <WORKER-公网IP> <MANAGER-IP>:<MANAGER-PORT>
Docker Machine
待更.
相关文章:
docker 进阶命令(基于Ubuntu)
数据卷 Volume: 目录映射, 目录挂载 匿名绑定: 匿名绑定的 volume 在容器删除的时候, 数据卷也会被删除, 匿名绑定是不能做到持久化的, 地址一般是 /var/lib/docker/volumes/xxxxx/_data 绑定卷时修改宿主机的目录或文件, 容器内的数据也会同步修改, 反之亦然 # 查看所有 vo…...

机器学习数学基础:29.t检验
t检验学习笔记 一、t检验的定义和用途 t检验是统计学中常用的假设检验方法,主要用于判断样本均值与总体均值间,或两个样本均值间是否存在显著差异。 在实际中应用广泛,例如在医学领域可用于比较两种药物的疗效;在教育领域&…...

HarmonyNext上传用户相册图片到服务器
图片选择就不用说了,直接用 无须申请权限 。 上传图片,步骤和android对比稍微有点复杂,可能是为了安全性考虑,需要将图片先拷贝到缓存目录下面,然后再上传,当然你也可以转成Base64,然后和服务…...

WebAssembly 3.0发布:浏览器端高性能计算迎来新突破!
“WebAssembly 3.0来了,浏览器端的高性能计算将彻底改变!”2025年,WebAssembly(Wasm)迎来了重大更新——WebAssembly 3.0正式发布。这次更新不仅支持多线程和SIMD指令集,还优化了内存管理,让浏览…...

计算机组成原理—— 外围设备(十三)
记住,伟大的成就往往诞生于无数次尝试和失败之后。每一次跌倒,都是为了让你学会如何更加坚定地站立;每一次迷茫,都是为了让你找到内心真正的方向。即使前路漫漫,即使困难重重,心中的火焰也不应熄灭。它代表…...

面试题之Vuex,sessionStorage,localStorage的区别
Vuex、localStorage 和 sessionStorage 都是用于存储数据的技术,但它们在存储范围、存储方式、应用场景等方面存在显著区别。以下是它们的详细对比: 1. 存储范围 Vuex: 是 Vue.js 的状态管理库,用于存储全局状态。 数据存储在内…...

window中git bash使用conda命令
window系统的终端cmd和linux不一样,运行不了.sh文件,为了在window中模仿linux,可以使用gui bash模拟linux的终端。为了在gui bash中使用python环境,由于python环境是在anaconda中创建的,所以需要在gui bash使用conda命…...
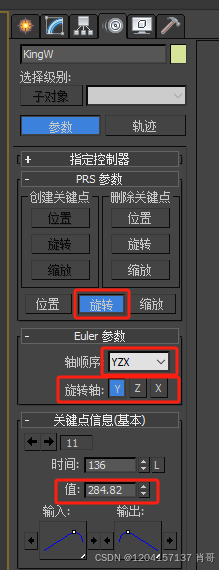
象棋掉落动画(局部旋转动画技巧)
1.被撞击阶段:根据被撞击速度,合理设置被撞距离 2.倒地阶段:象棋倒地的同时稍微前移 3.滚地阶段:象棋滚地后停止,在最后5帧内稍微回转一下。这里启用“PRS参数”的旋转来制作局部旋转动画...

Pycharm 2024在解释器提供的python控制台中运行py文件
2024版的界面发生了变化, run with python console搬到了这里:...

课题推荐:高空长航无人机多源信息高精度融合导航技术研究
高空长航无人机多源信息高精度融合导航技术的研究,具有重要的理论意义与应用价值。通过深入研究多源信息融合技术,可以有效提升无人机在高空复杂环境下的导航能力,为无人机的广泛应用提供强有力的技术支持。希望该课题能够得到重视和支持&…...

《DeepSeek训练算法:开启高效学习的新大门》
在人工智能的浪潮中,大语言模型的发展日新月异。DeepSeek作为其中的佼佼者,凭借其独特的训练算法和高效的学习能力,吸引了众多目光。今天,就让我们深入探究DeepSeek训练算法的独特之处,以及它是如何保证模型实现高效学…...

promise用法总结以及手写promise
JavaScript中的 Promise 是用于处理异步操作的对象,它代表了一个异步操作的最终完成(或失败)及其结果值。Promise 是异步编程的一种更简洁和更可读的方式,避免了回调地狱的问题。 Promise 的基本概念 一个 Promise 是一个表示异步…...

春招项目=图床+ k8s 控制台(唬人专用)
1. 春招伊始 马上要春招了,一个大气的项目(冲击波项目)直观重要,虽然大家都说基础很重要,但是一个足够新颖的项目完全可以把你的简历添加一个足够闪亮的点。 这就不得不推荐下我的 k8s 图床了,去年折腾快…...

Android 11.0 系统settings添加ab分区ota升级功能实现二
1.概述 在11.0的系统rom定制化开发中,在进行系统ota升级的功能中,在10.0以前都是使用系统 RecoverySystem的接口实现升级的,现在可以实现AB分区模式来进行ota升级的,但是 必须需要系统支持ab分区升级的模式才可以的,接下来分析下看怎么样进行ota升级功能实现 2.系统sett…...

【Spring+MyBatis】_图书管理系统(上篇)
目录 1. MyBatis与MySQL配置 1.1 创建数据库及数据表 1.2 配置MyBatis与数据库 1.2.1 增加MyBatis与MySQL相关依赖 1.2.2 配置application.yml文件 1.3 增加数据表对应实体类 2. 功能1:用户登录 2.1 约定前后端交互接口 2.2 后端接口 2.3 前端页面 2.4 单…...

什么是3D视觉无序抓取?
3D视觉无序抓取是一种结合三维视觉技术、机器人控制与智能算法的工业自动化解决方案,旨在实现机器人对散乱、无序堆放的物体进行自主识别、定位和抓取的操作。其核心是通过3D视觉系统获取物体的三维空间信息,结合路径规划与避障算法,引导机械臂完成高精度抓取任务,无需依赖…...

【Java】理解字符串拼接与数值运算的优先级
博客主页: [小ᶻ☡꙳ᵃⁱᵍᶜ꙳] 本文专栏: Java 文章目录 💯前言💯代码分析1. 第一句输出2. 第二句输出3. 第三句输出 💯关键概念与深入分析1. 字符串拼接的优先级2. 运算符的优先级与结合性3. 字符串拼接与数值运算的结合 &…...

[250217] x-cmd 发布 v0.5.3:新增 DeepSeek AI 模型支持及飞书/钉钉群机器人 Webhook 管理
目录 X-CMD 发布 v0.5.3📃Changelog🧩 deepseek🧩 feishu|dingtalk📦 x-cmd✅ 升级指南 X-CMD 发布 v0.5.3 📃Changelog 🧩 deepseek 新增 deepseek 模块,用户可通过 deepseek 直接请求使用 …...

渗透利器:Burp Suite 联动 XRAY 图形化工具.(主动扫描+被动扫描)
Burp Suite 联动 XRAY 图形化工具.(主动扫描被动扫描) Burp Suite 和 Xray 联合使用,能够将 Burp 的强大流量拦截与修改功能,与 Xray 的高效漏洞检测能力相结合,实现更全面、高效的网络安全测试,同时提升漏…...

Linux、Docker与Redis核心知识点与常用命令速查手册
Linux、Docker与Redis核心知识点与常用命令速查手册 一、Linux基础核心 1. 核心概念 文件系统:采用树形结构,根目录为/权限机制:rwx(读/写/执行)权限,用户分为owner/group/others软件包管理: …...

阿里云 OSS 安全最佳实践:保护云端数据的终极指南
阿里云 OSS 安全最佳实践:保护云端数据的终极指南 【免费下载链接】ali-oss Aliyun OSS(Object Storage Service) JavaScript SDK for the Browser and Node.js 项目地址: https://gitcode.com/gh_mirrors/al/ali-oss 阿里云 OSS(Object Storage …...

数据采集系统隐性成本分析与NI-DAQmx技术优势
1. 数据采集系统的隐性成本解析在工业自动化和测试测量领域,数据采集(DAQ)系统是获取物理世界信息的关键通道。从业十余年,我见过太多项目在初期只关注硬件采购成本,却在后期被各种隐性时间成本拖垮预算。根据行业调查…...

告别迷茫!用SSCTOOL和Excel表格,手把手搞定你的第一个EtherCAT从站代码
从零开始构建EtherCAT从站:SSCTOOL与Excel配置全流程解析 第一次接触EtherCAT从站开发时,面对陌生的协议栈和复杂的配置项,很多工程师都会感到无从下手。本文将带你用最直观的方式,从工具安装到代码生成,一步步完成第一…...
)
告别调参噩梦:手把手教你用Simulink搞定永磁同步电机的线性自抗扰控制(LADRC)
永磁同步电机线性自抗扰控制实战:从Simulink建模到参数整定全解析 第一次在实验室搭建永磁同步电机控制系统时,盯着屏幕上那些密密麻麻的波形和参数,我完全不知道从何下手。传统PID调参已经让人头疼,而当我转向自抗扰控制…...

AI文本人性化:从技术原理到本地部署的完整实践指南
1. 项目概述:当AI写作遇上“人性化”改造最近在GitHub上看到一个挺有意思的项目,叫“AI-Text-Humanizer”。光看名字,你大概就能猜到它是干什么的:把AI生成的文本,变得像人写的一样。这听起来可能有点“反AI”…...

如何通过zteOnu一键开启中兴光猫工厂模式?终极指南助你轻松管理网络设备
如何通过zteOnu一键开启中兴光猫工厂模式?终极指南助你轻松管理网络设备 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 中兴光猫配置繁琐、界面复杂让你头疼不已ÿ…...

大语言模型文本检测:DMAP技术原理与应用
1. 大语言模型生成文本检测的技术背景与挑战在自然语言处理领域,大语言模型(LLM)的文本生成能力已经达到令人惊叹的水平。从技术文档撰写到创意写作,LLM生成的文本在流畅度和连贯性上越来越接近人类水平。这种进步带来一个关键问题…...

观察 Taotoken 模型广场如何辅助进行模型选型决策
观察 Taotoken 模型广场如何辅助进行模型选型决策 1. 模型广场的核心功能概览 Taotoken 模型广场作为平台的核心模块,为开发者提供了集中浏览和管理可用大模型的入口。该功能区主要展示平台当前支持的各类模型,包括基础模型、微调版本以及不同供应商提…...

Python全站链接爬取工具优化-支持过滤和断点续爬
Python全站链接爬取工具优化:支持过滤和断点续爬 标签:#Python #Playwright #爬虫 #AI知识库 日期:2026-05-03 摘要:本文介绍对全站链接爬取工具的优化升级,新增链接过滤、断点续爬、默认不下载文件三个优化点…...

RAGFlow 系列教程 第十课:LLM 抽象层 -- 统一模型接口
系列: RAGFlow v0.25.0 源码深度解析 作者: 耿雨飞 前置知识: 已完成第九课"文档解析器层 – 多模态文档处理实战"的学习 导读 在前面的课程中,我们多次看到 RAGFlow 调用各种大模型完成任务:VLM 做图像理解、Embedding 模型做向量化、Rerank 模型做结果重排序、C…...