全平台搭载旭日5!科沃斯GOAT智能割草机器人全新系列正式开售
要闻
近日,科沃斯全新发布的GOAT A Series 和 GOAT O Series割草机器人,将在多国市场正式上市发售。作为业界最强的割草机器人产品之一,GOAT致力为割草机带来基于机器人视觉的专业定位解决方案。科沃斯GOAT全新系列产品全平台搭载地瓜机器人全新推出的旭日5智能计算芯片,具备10 TOPs 算力,拥有丰富的异构计算资源,可支持机器人在本地完成全栈任务的高效计算。基于科沃斯领先的LELS™定位技术,GOAT全新系列产品进一步提升了机器人的精准定位和智能导航能力,可自主绘制高精度 3D 地图,即使在复杂布局或夜间也能实现“厘米级”精确定位与导航。

旭日5智能计算芯片
无边界智能割草机器人首选平台
作为新一代无边界智能割草机器人首选平台,旭日5基于BPU贝叶斯架构打造,凭借高算力、低功耗、丰富外围接口以及多种硬加速模块的设计,为割草机器人提供了全方位的资源,可同时处理包括RTK、视觉、TOF、双目以及激光雷达在内的多路传感器信号输入与融合处理,能够为高精度定位感知和避障等功能提供强大的视觉感知能力。

为了让机器人具备如人眼一般的感知能力,能够适应逆光、暗光等多种复杂室外光线条件,旭日5针对户外场景进行了深度ISP研发和调试,并根据割草机器人软件算法所需,针对双目深度估计以及VSLAM等算法进行了深度的BPU优化,为行业提供高性能算法支持,并达到业内领先水平。

基于旭日5的双目视觉感知算法效果演示
针对割草机器人场景核心算法,旭日5进行了深度适配和优化,可以协助客户缩短半年甚至一年的算法部署时间,全面提速割草机器人量产进程。更值一提的是,合作伙伴基于旭日5的BPU双目深度算法,可实现近距离3m以内、1%左右的高精度避障,并通过将VSLAM中特征提取和跟踪移植到BPU上处理,可获得更佳的抗噪声性能和更鲁棒的表现。
赋能客户持续领跑市场
引领割草机器人全球化普及
据美国研究机构 Grand View Research 统计,2021年,全球割草机市场规模已达到304亿美元,其中有70%源于家用,而割草机器人渗透率不足10%。随着割草机器人性能和消费者接受度的不断提升,割草机器人市场渗透率将迎来进一步增长。
作为欧洲市场的热销产品,科沃斯GOAT系列割草机器人在2024年营收翻倍。此次,搭载全新一代旭日5智能芯片的GOAT全新系列产品,将凭借更加精准的感知、定位和避障能力,以更加高效、悦目的割草体验,带动新一轮的销售热潮。
地瓜机器人CEO王丛 表示:“视觉技术的发展正在加速割草机智能化,作为新一代无边界智能割草机器人的首选算力平台,旭日系列芯片已经实现了割草机器人高、中、低机型的全面覆盖。面向割草机市场的广阔前景,地瓜机器人将从用户体验和系统成本优化两个层面出发,赋能客户持续打造极具竞争力的产品,引领割草机器人的全球化普及。”
科沃斯是地瓜机器人重要的战略合作伙伴,双方携手打造了多款爆款产品并在市场持续热销。自2021年9月,DEEBOT X1家族扫拖机器人全平台搭载旭日3芯片正式发布,全球销量高达数百万台,是迄今为止全球扫地机器人出货量最大的机型。此后,地瓜机器人旭日系列芯片相继成为DEEBOT X2系列、DEEBOT T10系列、空气净化机器人沁宝Z1等主力产品的主控平台。
此次,地瓜机器人与科沃斯的再度合作,历时8个月便实现GOAT全新系列智能割草机器人产品落地,创下了行业量产速度新纪录,这既是双方基于底层技术创新突破产品体验的又一重磅成果,同时也是双方优势互补、紧密合作,从扫地机器人到割草机器人,持续扩展家庭服务机器人场景边界的重要里程碑。
关于科沃斯:
科沃斯机器人是全球最早的服务机器人研发与制造商之一,专注于服务机器人的独立研发、设计与制造,致力于成为全球顶尖的机器人公司。科沃斯机器人秉持“让机器人 服务每个人”的使命。自1998年成立以来,科沃斯深耕服务机器人使用场景及体验的洞察与分析,专注于研发、设计和制造全球领先的家用、商用服务机器人解决方案,推动高品质的智能生活、生产方式。创立伊始的24年间,科沃斯已成功向全球市场推出包括家用扫地机器人DEEBOT,擦窗机器人WINBOT,空气净化机器人AIRBOT,及面向公共领域的“AI+服务机器人”产品在内的完整机器人服务解决方案。此外,科沃斯还深耕机器人产业生态,成立人工智能工程院、布局智能传感器研究,致力于持续引领行业前沿技术发展。
二十余年在服务机器人市场的耕耘,对产品、服务的极致探索,让科沃斯赢得了全球用户的肯定。我们将始终致力于打造生活、生产、生态全场景的服务机器人,带给全人类智慧、便捷、人性化的崭新体验。我们也将始终坚持以用户需求为研发导向,用创新推动行业、产业发展,用智能科技赋能全人类共享未来美好新世界。
关于地瓜机器人:
起步于2015年诞生的地平线,地瓜机器人是业界领先的机器人软硬件通用底座提供商。承载着「成为机器人时代的Wintel」的品牌初心,地瓜机器人致力为具身智能的前沿科研探索、消费级机器人应用落地、中小创客及个人开发者创意开发提供全链路的开发基础设施,加速机器智能进化,促进人机和谐伴生。
为了全面推进机器人的智能化进程,地瓜机器人践行软硬结合的前瞻技术理念,基于领先的深度学习与决策推理算法能力,面向具身智能机器人打造了兼备极致性能和高效灵活的智能计算平台,为机器人环境感知、多模预测、实时决策提供强大的算力支持,加速具身智能机器人与物理世界的融合,推动机器人应用的多场景普及。
以旭日®智能计算芯片和RDK®机器人开发者套件为核心,地瓜机器人提供了 5~128 TOPs 多层级的智能计算平台,横向覆盖人形机器人、轮足机器人、四足机器狗、服务陪伴机器人、物流AMR、扫地机器人、割草机器人多种场景;纵向提供完善成熟的开发支持,以软硬协同、端云一体的全链路开发平台,助力客户和开发者打造范式级创新产品,加速机器人开发与规模化落地。
迄今,超过200+中小创客、200+头部高校、50,000+个人开发者在地瓜机器人平台上,创造了超过50+品类的智能机器人,为全球数百万用户带来了智能化的创新体验。
相关文章:
全平台搭载旭日5!科沃斯GOAT智能割草机器人全新系列正式开售
要闻 近日,科沃斯全新发布的GOAT A Series 和 GOAT O Series割草机器人,将在多国市场正式上市发售。作为业界最强的割草机器人产品之一,GOAT致力为割草机带来基于机器人视觉的专业定位解决方案。科沃斯GOAT全新系列产品全平台搭载地瓜机器人…...

ORB-SLAM3的源码学习:TwoViewReconstruction通过两幅图像来实现重建
前言 TwoViewReconstruction和Initializer 在功能上实际是有重叠,但它们的设计目标和使用场景不同。TwoViewReconstruction专注于处理两幅图像之间的相对运动和三维点重建,而Initializer 负责整个 SLAM 系统的初始化,包括地图的构建和系统的…...

基于单片机ht7038 demo
单片机与ht7038 demo,三相电能表,电量数据包括电流电压功能,采用免校准方法 列表 ht7038模块/CORE/core_cm3.c , 17273 ht7038模块/CORE/core_cm3.h , 85714 ht7038模块/CORE/startup_stm32f10x_hd.s , 15503 ht7038模块/CORE/startup_stm32…...
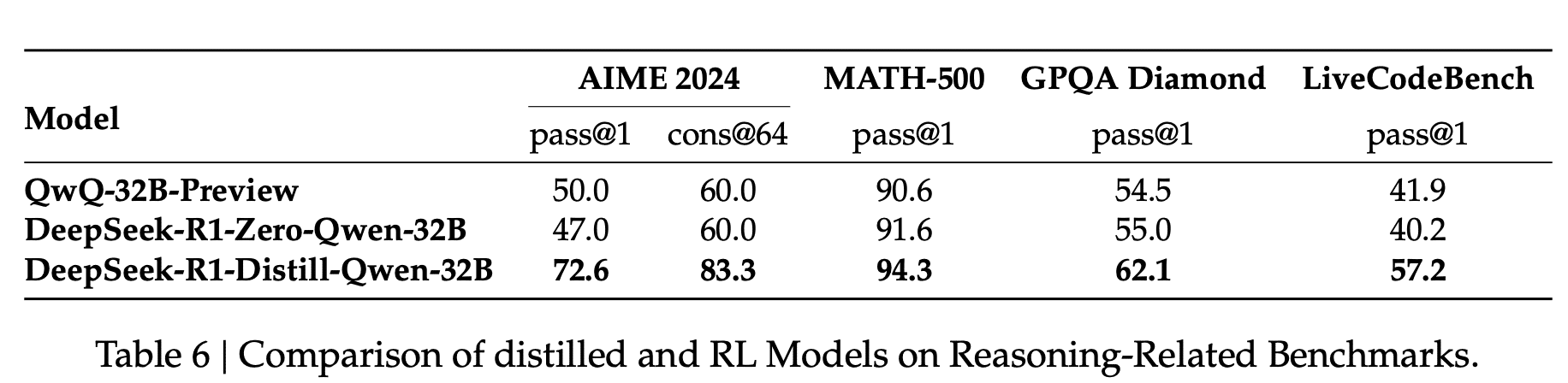
【DeepSeek三部曲】DeepSeek-R1论文详细解读
这里写目录标题 摘要1. 引言1.1 贡献1.2 评估结果总结 2. 方法2.1 概述2.2 DeepSeek-R1-Zero:在base模型上进行强化学习2.2.1 强化学习算法2.2.2 奖励模型2.2.3 训练模版2.2.4 DeepSeek-R1-Zero的表现、自我进化过程以及顿悟时刻 2.3 DeepSeek-R1:带有冷…...
【深度学习】计算机视觉(CV)-目标检测-DETR(DEtection TRansformer)—— 基于 Transformer 的端到端目标检测
1.什么是 DETR? DETR(DEtection TRansformer) 是 Facebook AI(FAIR)于 2020 年提出的 端到端目标检测算法,它基于 Transformer 架构,消除了 Faster R-CNN、YOLO 等方法中的 候选框(…...

Windows Docker运行Implicit-SVSDF-Planner
Windows Docker运行GitHub - ZJU-FAST-Lab/Implicit-SVSDF-Planner: [SIGGRAPH 2024 & TOG] 1. 设置环境 我将项目git clone在D:/Github目录中。 下载ubuntu20.04 noetic镜像 docker pull osrf/ros:noetic-desktop-full-focal 启动容器,挂载主机的D:/Github文…...

ELK安装部署同步mysql数据
ELK 安装部署指南 ELK 是 Elasticsearch、Logstash 和 Kibana 的简称,用于日志收集、存储、分析和可视化。 1. 安装 Elasticsearch Elasticsearch 是一个分布式搜索和分析引擎。 1.1 下载并安装 访问 Elasticsearch 官网 下载最新版本。 解压并安装: tar…...
Vision Transformer图像分块嵌入核心技术解析:从数学推导到工业级应用
一、技术原理与数学建模 1.1 图像分块过程数学表达 给定输入图像 x ∈ R H W C x \in \mathbb{R}^{H \times W \times C} x∈RHWC,将其分割为 N N N 个尺寸为 P P P \times P PP 的图块: x p ∈ R N ( P 2 ⋅ C ) 其中 N H W P 2 x_p \in \m…...

【产品资料】陀螺匠·企业助手v1.8 产品介绍
陀螺匠企业助手是一套采用Laravel 9框架结合Swoole高性能协程服务与Vue.js前端技术栈构建的新型智慧企业管理与运营系统。该系统深度融合了客户管理、项目管理、审批流程自动化以及低代码开发平台,旨在为企业提供一站式、数字化转型的全方位解决方案,助力…...

深度求索-DeepSeek-R1本地部署指南
1、参考:部署指南 2、参考:deepseek本地部署只需三步 DeepSeek本地部署只需三步: 1、安装运行环境:安装 Ollama:Ollama官网:官网 2、下载模型:参数越大,需要物里硬件越多 3、安装部…...

代码随想录day12
144.二叉树的前序遍历 //明确递归的函数,结束边界,单层逻辑 void traversal(TreeNode* node, vector<int>& list){if(node nullptr){return;}list.push_back(node->val);traversal(node->left, list);traversal(node->right, list)…...
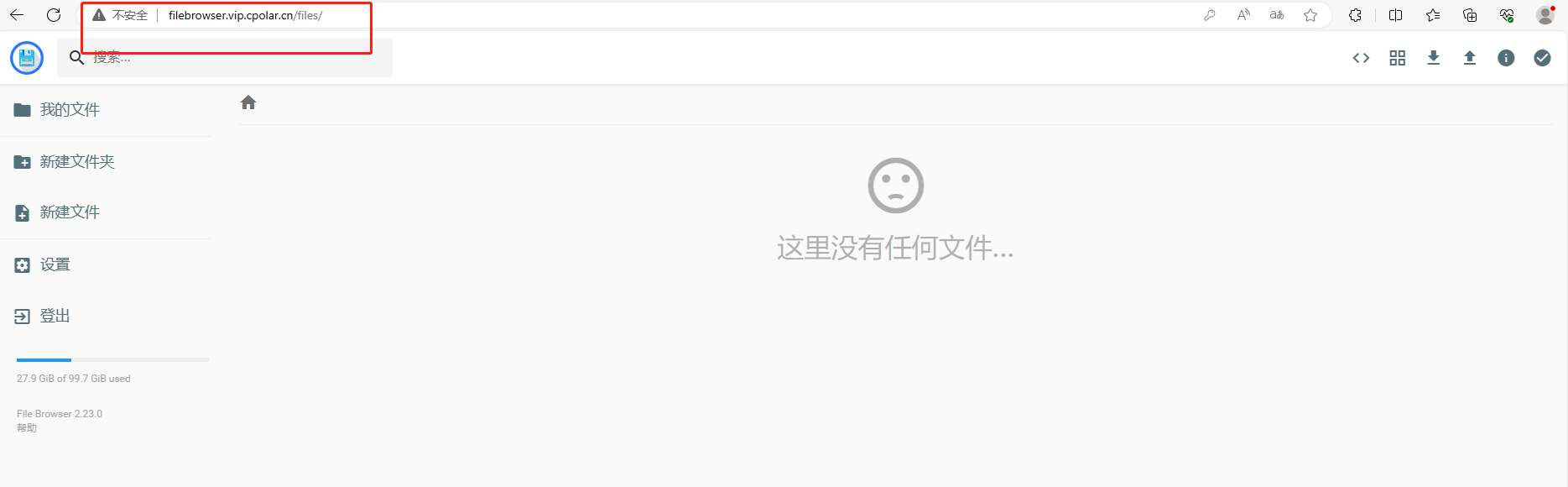
告别第三方云存储!用File Browser在Windows上自建云盘随时随地访问
文章目录 前言1.下载安装File Browser2.启动访问File Browser3.安装cpolar内网穿透3.1 注册账号3.2 下载cpolar客户端3.3 登录cpolar web ui管理界面3.4 创建公网地址 4.固定公网地址访问 前言 无论是个人用户还是企业团队,都希望能够有一个高效、安全的解决方案来…...

Ubuntu 下 nginx-1.24.0 源码分析 - NGX_MAX_ALLOC_FROM_POOL
NGX_MAX_ALLOC_FROM_POOL 定义在 src\core\ngx_palloc.h #define NGX_MAX_ALLOC_FROM_POOL (ngx_pagesize - 1) 在 src/os/unix/ngx_alloc.h extern ngx_uint_t ngx_pagesize; 这个全局变量定义在 src\os\unix\ngx_alloc.c 中 ngx_uint_t ngx_pagesize; 在 src/os/unix/ngx_…...
)
PyQt6/PySide6 的 SQL 数据库操作(QtSql)
一、核心组件架构 1.1 QtSql模块构成 QSqlDatabase:数据库连接管理(支持连接池)QSqlQuery:SQL语句执行与结果遍历QSqlTableModel:可编辑的表格数据模型QSqlQueryModel:只读查询结果模型QSqlRelationalTab…...

利用IDEA将Java.class文件反编译为Java文件:原理、实践与深度解析
文章目录 引言:当.class文件遇到源代码缺失第一章:反编译技术基础认知1.1 Java编译执行原理1.2 反编译的本质1.3 法律与道德边界 第二章:IDEA内置反编译工具详解2.1 环境准备2.2 三步完成基础反编译2.3 高级反编译技巧2.3.1 调试模式反编译2.…...

Kafka偏移量管理全攻略:从基础概念到高级操作实战
#作者:猎人 文章目录 前言:概念剖析kafka的两种位移消费位移消息的位移位移的提交自动提交手动提交 1、使用--to-earliest重置消费组消费指定topic进度2、使用--to-offset重置消费offset3、使用--to-datetime策略指定时间重置offset4、使用--to-current…...

【R语言】GitHub Copilot安装-待解决
参考: 文章目录...

软件定义汽车时代的功能安全和信息安全
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 简单,单纯,喜欢独处,独来独往,不易合同频过着接地气的生活…...

qt的QSizePolicy的使用
使用 QSizePolicy 设置控件的伸缩因子 在 Qt 中,QSizePolicy 控制 控件如何在布局中伸缩。如果想要影响控件的大小调整行为,可以通过 QSizePolicy::setHorizontalStretch() 和 QSizePolicy::setVerticalStretch() 设置伸缩因子。 基本用法 假设我们有一个…...

简单几个步骤完成 Oracle 到金仓数据库(KingbaseES)的迁移目标
作为国产数据库的领军选手,金仓数据库(KingbaseES)凭借其成熟的技术架构和广泛的市场覆盖,在国内众多领域中扮演着至关重要的角色。无论是国家电网、金融行业,还是铁路、医疗等关键领域,金仓数据库都以其卓…...

鸿蒙 动态下载增强功能:产品特性按需分发
随着HarmonyOS应用的持续发展,应用的功能越来越丰富。但实际上,80%的用户使用时长都集中在20%的特性上,其余功能可能只面向部分用户。 为了避免用户首次下载应用耗时过长及过多占用用户空间,应用市场服务提供了按需分发的能力。 …...

BGP性能优化实战:超参数调优与网络稳定性提升
1. 项目概述BGP(边界网关协议)作为互联网核心路由协议,其性能优化一直是网络工程师的必修课。在实际运维中,BGP路由收敛速度、内存占用和CPU利用率等指标直接关系到网络稳定性。而BGP优化任务(BGPO)的超参数…...

【LLM实时交互性能瓶颈终结者】:用Swoole协程+自定义协议替代HTTP轮询,QPS提升23.6倍实测报告
更多请点击: https://intelliparadigm.com 第一章:LLM实时交互性能瓶颈终结者:Swoole协程自定义协议方案全景概览 在大语言模型(LLM)高频、低延迟的实时对话场景中,传统 HTTP/1.1 同步阻塞模型常因连接复用…...
:从dev环境校验到生产环境审计追踪,一文打通GDPR/等保2.0合规闭环)
Tidyverse 2.0自动化报告实战手册(企业级CI/CD集成全路径曝光):从dev环境校验到生产环境审计追踪,一文打通GDPR/等保2.0合规闭环
更多请点击: https://intelliparadigm.com 第一章:Tidyverse 2.0自动化报告体系全景图 Tidyverse 2.0 不再是单一包集合,而是一套以声明式语法驱动、可插拔架构支撑的自动化报告生产平台。其核心演进在于将数据清洗、可视化、文档编译与部署…...

2025届最火的六大AI写作平台推荐榜单
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 在学术写作范畴里,人工智能技术被广泛运用了,它成了论文撰写进程里边…...

从VSCode转战华为云CodeArts IDE:我的Python开发环境迁移与配置实战
从VSCode转战华为云CodeArts IDE:我的Python开发环境迁移与配置实战 作为一名长期使用VSCode进行Python开发的工程师,最近我决定尝试华为云推出的CodeArts IDE。这个决定源于对国产开发工具的好奇,也希望能探索更多高效的开发可能性。迁移过程…...

BaiduPCS-Web终极指南:告别百度网盘下载限速的完整教程
BaiduPCS-Web终极指南:告别百度网盘下载限速的完整教程 【免费下载链接】baidupcs-web 项目地址: https://gitcode.com/gh_mirrors/ba/baidupcs-web 还在为百度网盘的下载速度而烦恼吗?每次下载大文件时,看着进度条缓慢移动ÿ…...

终极AriaNg下载管理解决方案:为什么这款Web前端工具能改变你的下载体验 [特殊字符]
终极AriaNg下载管理解决方案:为什么这款Web前端工具能改变你的下载体验 🚀 【免费下载链接】AriaNg AriaNg, a modern web frontend making aria2 easier to use. 项目地址: https://gitcode.com/gh_mirrors/ar/AriaNg AriaNg是一款现代化的Web前…...

在Node.js后端服务中集成Taotoken调用大模型接口的完整指南
在Node.js后端服务中集成Taotoken调用大模型接口的完整指南 1. 环境准备与依赖安装 在开始集成Taotoken之前,确保你的Node.js开发环境已经准备就绪。推荐使用Node.js 18或更高版本,以获得最佳的异步操作支持。首先创建一个新的项目目录并初始化npm&…...

在多轮长对话任务中观察Taotoken服务稳定性的实际案例
在多轮长对话任务中观察Taotoken服务稳定性的实际案例 1. 测试场景设计 我们设计了一个模拟心理咨询场景的多轮对话测试,该场景需要AI助手持续跟踪用户情绪变化并保持上下文连贯性。测试脚本包含20轮对话交互,平均每轮用户输入约120字,AI响…...