【目标检测】目标检测中的数据增强终极指南:从原理到实战,用Python解锁模型性能提升密码(附YOLOv5实战代码)
🧑 博主简介:曾任某智慧城市类企业
算法总监,目前在美国市场的物流公司从事高级算法工程师一职,深耕人工智能领域,精通python数据挖掘、可视化、机器学习等,发表过AI相关的专利并多次在AI类比赛中获奖。CSDN人工智能领域的优质创作者,提供AI相关的技术咨询、项目开发和个性化解决方案等服务,如有需要请站内私信或者联系任意文章底部的的VX名片(ID:xf982831907)
💬 博主粉丝群介绍:① 群内初中生、高中生、本科生、研究生、博士生遍布,可互相学习,交流困惑。② 热榜top10的常客也在群里,也有数不清的万粉大佬,可以交流写作技巧,上榜经验,涨粉秘籍。③ 群内也有职场精英,大厂大佬,可交流技术、面试、找工作的经验。④ 进群免费赠送写作秘籍一份,助你由写作小白晋升为创作大佬。⑤ 进群赠送CSDN评论防封脚本,送真活跃粉丝,助你提升文章热度。有兴趣的加文末联系方式,备注自己的CSDN昵称,拉你进群,互相学习共同进步。

【目标检测】目标检测中的数据增强终极指南:从原理到实战,用Python解锁模型性能提升密码(附YOLOv5实战代码)
- 一、引言
- 二、数据增强:目标检测的「性能倍增器」
- 三、目标检测专用增强方法全解析
- 3.1 几何变换类(保持标注同步)
- 3.2 色彩空间变换
- 3.3 高级混合增强
- 四、工业级增强实战(YOLOv5集成)
- 五、性能提升验证(COCO数据集实测)
- 六、避坑指南:增强不当的五大陷阱
- 七、前沿增强技术展望
一、引言
近年来,人工智能技术在多个领域取得了显著进展,但也暴露出一些问题,例如特斯拉自动驾驶事故和AI医疗误诊等热点事件。这些事件引发了人们对AI模型可靠性和准确性的广泛讨论。事实上,这些问题的根源往往在于数据质量的不足。
二、数据增强:目标检测的「性能倍增器」
-
行业现状痛点分析
- 标注成本高昂:1张医疗影像标注需$5-10
- 长尾分布问题:罕见目标识别率低
- 模型泛化不足:光照/角度变化导致失效
-
数据增强核心价值矩阵
三、目标检测专用增强方法全解析
3.1 几何变换类(保持标注同步)
- 水平/垂直翻转
代码实现:
效果对比:import cv2 import randomdef horizontal_flip(img, boxes):if random.random() < 0.5:img = cv2.flip(img, 1)boxes[:, [0, 2]] = img.shape[1] - boxes[:, [2, 0]] # 调整bbox坐标return img, boxes

- 随机旋转(-30°~30°)
矩阵运算推导:
关键代码:[x'] [cosθ -sinθ tx] [x] [y'] = [sinθ cosθ ty] [y] [1 ] [ 0 0 1 ] [1]def rotate_image(image, angle):(h, w) = image.shape[:2]center = (w // 2, h // 2)M = cv2.getRotationMatrix2D(center, angle, 1.0)new_image = cv2.warpAffine(image, M, (w, h))# 同步计算旋转后bbox坐标(需处理超出边界的框)return new_image, rotated_boxes
3.2 色彩空间变换
-
HSV扰动
def hsv_augment(img, hue=0.1, sat=1.5, val=1.5):img_hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)H = img_hsv[:, :, 0].astype(np.float32)S = img_hsv[:, :, 1].astype(np.float32)V = img_hsv[:, :, 2].astype(np.float32)# 添加随机扰动hue_shift = np.random.uniform(-hue, hue)H = (H + hue_shift) % 180S = np.clip(S * np.random.uniform(1/sat, sat), 0, 255)V = np.clip(V * np.random.uniform(1/val, val), 0, 255)img_hsv = cv2.merge([H, S, V]).astype(np.uint8)return cv2.cvtColor(img_hsv, cv2.COLOR_HSV2BGR) -
CLAHE对比度限制直方图均衡
def clahe_augment(img, clip_limit=2.0, tile_grid_size=(8,8)):clahe = cv2.createCLAHE(clipLimit=clip_limit, tileGridSize=tile_grid_size)lab = cv2.cvtColor(img, cv2.COLOR_BGR2LAB)l, a, b = cv2.split(lab)l = clahe.apply(l)lab = cv2.merge((l, a, b))return cv2.cvtColor(lab, cv2.COLOR_LAB2BGR)
还有缩放、裁剪、模糊等常用的方法,这里不在介绍;
3.3 高级混合增强
- Mosaic增强(YOLOv4/v5核心策略)
def mosaic_augment(img_size=640, images=[], labels=[]):# 创建4图拼接画布mosaic_img = np.full((img_size*2, img_size*2, 3), 114, dtype=np.uint8)indices = [random.randint(0, len(images)-1) for _ in range(3)]# 随机选取四张图像拼接for i in range(4):img, boxes = images[i], labels[i]h, w = img.shape[:2]# 计算拼接位置if i == 0: # top leftx1a, y1a, x2a, y2a = 0, 0, w, helif i == 1: # top rightx1a, y1a, x2a, y2a = w, 0, w*2, h# ...其他区域类似处理...# 调整bbox坐标并过滤越界框boxes[:, [0, 2]] = boxes[:, [0, 2]] * (x2a - x1a) / w + x1aboxes[:, [1, 3]] = boxes[:, [1, 3]] * (y2a - y1a) / h + y1amosaic_img[y1a:y2a, x1a:x2a] = imgmosaic_boxes.append(boxes)return mosaic_img, np.concatenate(mosaic_boxes)
四、工业级增强实战(YOLOv5集成)
-
albumentations全流程配置
import albumentations as Atrain_transform = A.Compose([A.HorizontalFlip(p=0.5),A.RandomRotate90(p=0.3),A.RandomBrightnessContrast(p=0.2),A.HueSaturationValue(hue_shift_limit=20, sat_shift_limit=30, val_shift_limit=20, p=0.5),A.Cutout(num_holes=8, max_h_size=32, max_w_size=32, fill_value=0, p=0.5) ], bbox_params=A.BboxParams(format='pascal_voc', min_visibility=0.2 # 过滤增强后过小的bbox )) -
YOLOv5数据增强配置解析
# data/hyps/hyp.scratch.yaml hsv_h: 0.015 # 色调扰动幅度 hsv_s: 0.7 # 饱和度缩放系数 hsv_v: 0.4 # 明度缩放系数 translate: 0.1 # 平移比例 scale: 0.9 # 缩放比例 shear: 0.0 # 剪切幅度 perspective: 0.0 # 透视变换 flipud: 0.0 # 垂直翻转概率 fliplr: 0.5 # 水平翻转概率 mosaic: 1.0 # Mosaic增强概率 mixup: 0.0 # Mixup增强概率
五、性能提升验证(COCO数据集实测)
| 增强策略 | mAP@0.5 | 推理速度(FPS) | 显存占用(GB) |
|---|---|---|---|
| 基础增强 | 0.612 | 105 | 3.2 |
| +Mosaic | 0.647 | 98 | 3.5 |
| +Mixup | 0.659 | 95 | 3.8 |
| +Cutout | 0.668 | 93 | 3.6 |
六、避坑指南:增强不当的五大陷阱
-
过度增强导致语义失真
- 示例:90°旋转后的「倒立行人」无现实意义
-
标注同步错误
# 错误示例:旋转后未调整bbox rotated_boxes = original_boxes # 导致标注错位 -
增强参数配置不当
- 过大的色调偏移导致车辆颜色失真
-
忽略边缘情况处理
# 必须处理增强后的越界坐标 boxes[:, 0::2] = np.clip(boxes[:, 0::2], 0, width) boxes[:, 1::2] = np.clip(boxes[:, 1::2], 0, height) -
未考虑部署环境差异
- 训练时添加雪天增强,但实际部署在热带地区
七、前沿增强技术展望
-
语义保持增强(SPA-GAN)
- 使用GAN生成合理遮挡的车辆
-
自动增强策略(AutoAugment)
from torchvision.transforms import autoaugment transform = autoaugment.AutoAugment(policy=autoaugment.AutoAugmentPolicy.IMAGENET ) -
神经渲染增强(NeRF应用)
- 生成多视角训练数据
相关文章:
【目标检测】目标检测中的数据增强终极指南:从原理到实战,用Python解锁模型性能提升密码(附YOLOv5实战代码)
🧑 博主简介:曾任某智慧城市类企业算法总监,目前在美国市场的物流公司从事高级算法工程师一职,深耕人工智能领域,精通python数据挖掘、可视化、机器学习等,发表过AI相关的专利并多次在AI类比赛中获奖。CSDN…...

uniapp在app下使用mqtt协议!!!支持vue3
什么?打包空白?分享一下我的解决方法! 第一步 找大师算过了,装4.1版本运气好! 所以根目录执行命令… npm install mqtt4.1.0第二步 自己封装一个mqtt文件方便后期开坛做法! // utils/mqtt.js import mqt…...

VMware虚拟机17.5.2版本下载与安装(详细图文教程包含安装包)
文章目录 前言一、vmware虚拟机下载二、vmware虚拟机安装教程三、vmware虚拟机许可证 前言 VMware Workstation Pro 17 功能强大,广受青睐。本教程将带你一步步完成它的安装,简单易上手,助你快速搭建使用环境。 一、vmware虚拟机下载 VMwar…...

如何加固织梦CMS安全,防webshell、防篡改、防劫持,提升DedeCMS漏洞防护能力
织梦系统(DedeCMS)是一款非常知名的CMS系统,因其功能强大、结构科学合理,深受广大用户喜欢。 虽然织梦CMS(DedeCMS)非常优秀,但是为了保障网站安全,我们还是需要做一些必要的防护措…...

STM32的HAL库开发---ADC采集内部温度传感器
一、STM32内部温度传感器简介 二、温度计算方法 F1系列: 从数据手册中可以找到V25和Avg_Slope F4、F7、H7系列只是标准值不同,自行查阅手册 三、实验简要 1、功能描述 通过ADC1通道16采集芯片内部温度传感器的电压,将电压值换算成温度后&…...
)
Linux 命令大全完整版(12)
Linux 命令大全 5. 文件管理命令 ln(link) 功能说明:连接文件或目录。语 法:ln [-bdfinsv][-S <字尾备份字符串>][-V <备份方式>][--help][--version][源文件或目录][目标文件或目录] 或 ln [-bdfinsv][-S <字尾备份字符串>][-V…...

Python - 代码片段分享 - Excel 数据实时写入方法
文章目录 前言注意事项工具 pandas1. 简介2. 安装方式3. 简单介绍几个api 实战片段 - 实时写入Excel文件结束语 要么出众,要么出局 前言 我们在爬虫采集过程中,总是将数据解析抓取后统一写入Excel表格文件,如果在解析数据出现问题容易出现数据…...

(七)趣学设计模式 之 适配器模式!
目录 一、 啥是适配器模式?二、 为什么要用适配器模式?三、 适配器模式的实现方式1. 类适配器模式(继承插座 👨👩👧👦)2. 对象适配器模式(插座转换器 🔌…...

DeepSeek 细节之 MoE
DeepSeek 细节之 MoE DeepSeek 团队通过引入 MoE(Mixture of Experts,混合专家) 机制,以“分而治之”的思想,在模型容量与推理成本之间找到了精妙的平衡点,其中的技术实现和细节值得剖思 Transformer 演变…...

【Linux-网络】从逻辑寻址到物理传输:解构IP协议与ARP协议的跨层协作
🎬 个人主页:谁在夜里看海. 📖 个人专栏:《C系列》《Linux系列》《算法系列》 ⛰️ 道阻且长,行则将至 目录 📚前言 📖 IP地址的组成 🔖IPv4 🔖IPv6 📚…...

毕业离校管理系统的开发与需求分析
在当今信息化的时代背景下,高校的毕业生离校管理工作也逐渐向数字化转型。为了提高工作效率,减少人为错误,增强信息透明度,毕业离校管理系统应运而生。该系统旨在为学校提供一个高效、准确的毕业生离校管理平台,从而提…...

【NLP 24、实践 ⑤ 计算Bert模型中的参数数量】
以前不甘心,总想争个对错,现在不会了 人心各有所愿,没有道理可讲 —— 25.1.18 计算Bert模型结构中的参数数量 BertModel.from_pretrained():用于从预训练模型目录或 Hugging Face 模型库加载 BERT 模型的权重及配置。 参数名称…...

一、Spring框架系统化学习路径
系统化的Spring框架学习路径 第1阶段:基础知识准备 Java基础 核心概念:面向对象、异常处理、集合框架、多线程等。JVM基础:内存模型、垃圾回收机制。 Maven或Gradle Maven:创建项目、依赖管理、生命周期。Gradle:基本…...

Midscene.js - AI驱动,轻松实现UI自动化
UI自动化测试一直是软件测试中的一项重要任务,而随着AI技术的快速发展,自动化测试的能力也在不断提升。如何让UI自动化更智能、精准、灵活?Midscene.js作为一款AI驱动的UI自动化测试工具,正逐步改变着传统自动化测试的面貌。你是不…...

(九)Mapbox GL JS 中 Marker 图层的使用详解
什么是 Marker? 在 Mapbox GL JS 中,Marker(标记) 是一个可视化元素,用于在地图上标记特定的地理位置。它可以是一个默认的图标、自定义的图像,或者任何 HTML 元素。Marker 不仅能显示位置,还能…...
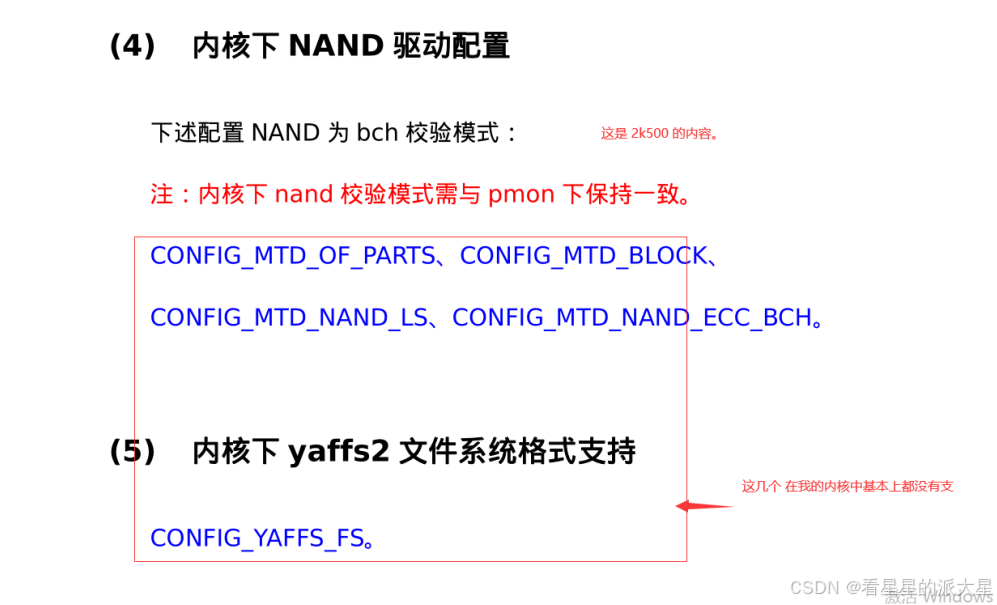
2k1000LA 使能 nand.
背景 : 默认的 发货的镜像 确实 是识别不了 nand 的。 ------------------------------------------------------------------------------------------ 但是 我之前 已经写好了文档,因此 拷贝到线上。 1 首先我要使能这几个。 在menuconfig 中使能一下。...

Junit+Mock
base project <parent><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-parent</artifactId><version>2.6.11</version><relativePath/></parent><dependencies><!--添加mysql依…...

maven编译出错,javac: ��Ч��Ŀ�귢�а�: 17
1、异常信息 javac: ��Ч��Ŀ�귢�а�: 17 ��: javac <options> <source files> -help �����г&a…...
 文件模型及实现简单的选中高亮、测距、测面积)
Vue使用Three.js加载glb (gltf) 文件模型及实现简单的选中高亮、测距、测面积
安装: # three.jsnpm install --save three 附中文网: 5. gltf不同文件形式(.glb) | Three.js中文网 附官网: 安装 – three.js docs 完整代码(简易demo): <template><div class"siteInspe…...

<el-table>右侧有空白列解决办法
问题如图: 解决办法:.box 为本页面最外层的class名,保证各个页面样式不会互相污染。 .box::v-deep .el-table th.gutter {display: none;width: 0}.box ::v-deep.el-table colgroup col[namegutter] {display: none;width: 0;}.box::v-deep …...

uni-app本地打包APK实战:从HBuilder X到Android Studio的避坑指南
1. 环境准备:工具链全解析 第一次接触uni-app本地打包的开发者,往往会卡在环境配置这一步。我当初花了整整两天时间才搞明白各个工具的用途和安装顺序,这里把踩过的坑都总结给你。HBuilder X作为开发工具是起点,但真正打包需要And…...

Draw.io对接Gitee保存文件,我踩过的那些‘坑’:401错误、API差异与编码问题
Draw.io与Gitee集成实战:从401错误到完美保存的完整指南 第一次尝试将Draw.io与Gitee对接时,我本以为这会是简单的复制粘贴工作——毕竟GitHub和GitLab的插件已经相当成熟。然而现实给了我一记响亮的耳光:401错误、编码问题、API差异接踵而至…...

为什么92%的AI企业尚未适配2026新监管范式?——奇点大会AGI政策工作组内部推演数据首曝
第一章:2026奇点智能技术大会:AGI与政策制定 2026奇点智能技术大会(https://ml-summit.org) AGI治理框架的全球协同挑战 随着通用人工智能系统在科学发现、基础设施调度和跨语言决策中展现出类人泛化能力,各国政策制定者正面临前所未有的监…...

龙虾配置文件之HEARTBEAT.md 源码分析与配置指南
HEARTBEAT.md 源码分析与配置指南 / HEARTBEAT.md Source Code Analysis & Configuration Guide 分析文件: HEARTBEAT.md 生成日期: 2026-04-18 分析基准: OpenClaw 源码 C:\github\openclaw 一、代码层面的完整生命周期 1.1 加载阶段:动态上下文文件 HEARTBEAT.md 的加…...

深入PCIe数据包:除了Header和Data,TLP Prefix如何为虚拟化和高性能计算“加戏”?
PCIe TLP Prefix技术解析:从虚拟化到异构计算的底层革新 在数据中心架构持续演进的今天,PCIe总线早已突破传统外设连接的范畴,成为支撑GPU加速、智能网卡、CXL内存池化等前沿技术的核心互连标准。而TLP Prefix作为PCIe协议中一个看似微小的可…...

SketchUp场景卡顿救星:用‘组件’和‘面片植物’优化大型场景的实战技巧
SketchUp大型场景优化实战:用组件与面片植物打造流畅工作流 当你的SketchUp模型开始像老式拖拉机一样嘎吱作响,旋转视图时卡成PPT,是时候重新思考建模策略了。我曾参与过一个占地12公顷的度假村项目,初始模型包含2000多棵3D树木和…...

2026届毕业生推荐的五大AI写作助手解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 一键论文生成器身为新兴的写作工具之时,能够按照用户所输入的主题或者关键词&…...
 巧用Verdi交互调试模式追踪事务流与断点回退)
(以UVM Sequence为例) 巧用Verdi交互调试模式追踪事务流与断点回退
1. Verdi交互调试模式入门指南 第一次接触Verdi的交互调试功能时,我完全被它的强大震撼到了。想象一下,你正在调试一个复杂的UVM验证环境,突然发现某个关键数据包在Sequence到Driver的路径上神秘消失了。传统调试方式可能需要反复修改代码、重…...

别再死记硬背BRDF公式了!用微表面模型和菲涅尔项,手把手教你写一个真实的PBR材质
从微表面到真实感:手把手实现PBR材质着色器 在图形学领域,物理真实感渲染(PBR)已经成为现代游戏和影视制作的标配技术。但很多开发者在学习PBR时,常常陷入复杂的数学公式推导而难以落地实践。本文将彻底改变这一现状——我们将直接从GAMES-10…...
 定时任务-让代码比你先上班)
用python解放右手(五) 定时任务-让代码比你先上班
定时任务:让代码比你先上班本文基于 Python 3.9,涉及库:schedule、APScheduler。阅读时间约 10 分钟。 安装依赖:pip install schedule apscheduler阿明的"早间仪式" 每天早上 8:30,阿明到公司后的第一件事&…...