图像处理之图像边缘检测算法
目录
1 图像边缘检测算法简介
2 Sobel边缘检测
3 经典的Canny边缘检测算法
4 演示Demo
4.1 开发环境
4.2 功能介绍
4.3 下载地址
参考
1 图像边缘检测算法简介
图像边缘检测是计算机视觉和图像处理中的基本问题,主要目的是提取图像中明暗变化明显的边缘细节信息。
图像边缘检测算法有很多,包括传统的模板算子(Sobel、Roberts、Prewitt、Laplace)、形态学边缘检测、经典的Canny边缘检测及基于深度学习的边缘检测算法等。
本文主要介绍Sobel模板算子和经典的Canny边缘检测算法。
2 Sobel边缘检测
Sobel模板算子是 Irwin Sobel 在1968年发表的论文 An Isotropic 3x3 Image Gradient Operator 中提出的一种一阶导数模板算子,用于计算图像灰度函数的近似梯度。
Sobel模板算子如下:
其中表示水平方向的卷积模板,
表示垂直方向的卷积模板。
对于图像中任何一点的像素P(i,j),使用水平和垂直卷积模板分别对图像进行卷积操作,得到水平梯度GX和垂直梯度GY,则梯度幅度计算如下:
完整梯度幅度计算公式如下:

Sobel边缘检测结果计算如下
其中,255白色表示边缘,0黑色表示背景。
C语言实现Sobel边缘检测算法代码如下:
/*************************************************
功 能:图像Sobel边缘检测
参 数:srcData - [输入/输出] 原始图像,格式为32位BGRA格式,执行后修为结果图像width - [输入] 原始图像宽度height - [输入] 原始图像高度stride - [输入] 原始图像的Stride(也就是行字节数width*4)threshold - [输入] 阈值
返 回: 0-成功,其他-失败.
*************************************************/
int sobel(unsigned char *srcData, int width, int height, int stride, int threshold)
{int ret = 0;unsigned char *dstData = (unsigned char*)malloc(sizeof(unsigned char) * height * stride);memset(dstData, 255, sizeof(unsigned char) * height * stride);int x, y, i, k, pos;int hValue, vValue, value;unsigned char *pSrcL0;unsigned char *pSrcL1;unsigned char *pSrcL2;unsigned char *pDstL;unsigned char SqrtValue[65026];pSrcL0 = srcData;pSrcL1 = srcData + stride;pSrcL2 = srcData + stride * 2;pDstL = dstData + stride;for (i = 0; i < 65026; i++){SqrtValue[i] = (unsigned char)(sqrt((float)i) < threshold ? 0 : 255);}for (y = 1; y < height - 1; y++){for (x = 1; x < width - 1; x++){pos = x * 4;hValue = (-pSrcL0[pos - 4] + pSrcL0[pos + 4] - 2 * pSrcL1[pos - 4] + 2 * pSrcL1[pos + 4] - pSrcL2[pos - 4] + pSrcL2[pos + 4]);vValue = (pSrcL0[pos - 4] + 2 * pSrcL0[pos] + pSrcL0[pos + 4] - pSrcL2[pos - 4] - 2 * pSrcL2[pos] - pSrcL2[pos + 4]);k = hValue * hValue + vValue * vValue;k = MIN2(k, 65025);pDstL[pos] = SqrtValue[k];pos++;hValue = (-pSrcL0[pos - 4] + pSrcL0[pos + 4] - 2 * pSrcL1[pos - 4] + 2 * pSrcL1[pos + 4] - pSrcL2[pos - 4] + pSrcL2[pos + 4]);vValue = (pSrcL0[pos - 4] + 2 * pSrcL0[pos] + pSrcL0[pos + 4] - pSrcL2[pos - 4] - 2 * pSrcL2[pos] - pSrcL2[pos + 4]);k = hValue * hValue + vValue * vValue;k = MIN2(k, 65025);pDstL[pos] = SqrtValue[k];pos++;hValue = (-pSrcL0[pos - 4] + pSrcL0[pos + 4] - 2 * pSrcL1[pos - 4] + 2 * pSrcL1[pos + 4] - pSrcL2[pos - 4] + pSrcL2[pos + 4]);vValue = (pSrcL0[pos - 4] + 2 * pSrcL0[pos] + pSrcL0[pos + 4] - pSrcL2[pos - 4] - 2 * pSrcL2[pos] - pSrcL2[pos + 4]);k = hValue * hValue + vValue * vValue;k = MIN2(k, 65025);pDstL[pos] = SqrtValue[k];}pSrcL0 += stride;pSrcL1 += stride;pSrcL2 += stride;pDstL += stride;}memcpy(srcData, dstData, sizeof(unsigned char) * height * stride);free(dstData);return ret;
}3 经典的Canny边缘检测算法
Canny边缘检测是 John Canny 在1986年首次提出的一种改进的边缘检测方法。该方法主要通过图像信号函数的极大值来判断图像的边缘像素点,与基本的Sobel模板算子等相比,其具有低错误率、高定位性等优点,因此被广泛应用。
(1)高斯滤波平滑处理
由于图像中经常包含一些高斯噪声,因此,在边缘检测前,要先用高斯滤波器对其进行滤波。为了方便,这里使用如下高斯滤波器模板
(2)梯度计算
使用一阶导数算子(一般用Sobel模板算子)计算灰度图像中每个像素点在水平和垂直方向上的导数GX、GY,得出梯度向量(GX,GY),最后得到该像素点的梯度幅度G和相位角D

(3)非极大值抑制
对于上面计算得到的梯度值,其实是一个粗边缘信息,可以通过非极大值抑制去掉一些非边缘信息。这里将当前像素的梯度值与其在梯度方向上的邻域像素的梯度值做对比,如果当前像素的梯度值为最大值,则保留该点的梯度信息,否则将该点删除或将像素值置为9。
(4)双阈值边缘检测和边缘连接
由非极大值抑制得到的边缘信息中包含较多伪边缘信息,可通过设置高低双阈值的方法去除它们。
首先,设定两个阈值,一个高阈值,一个低阈值,阈值大小根据实际情况设置,一般高阈值为低阈值的2.5倍。
然后判断:梯度值大于高阈值的像素点一定是边缘点,将该点像素值置为255;梯度值小于低阈值的像素点一定不是边缘点,将该点像素值置为0;介于高低阈值之间的像素点为准边缘点,对于这些点,如果其像素点周围8邻域的梯度值都小于高阈值,则认为其不是边缘点,将该点像素值置为0,否则置为255。
C语言实现Cannyl边缘检测算法代码如下:
/*************************************************
功 能:图像Canny边缘检测
参 数:srcData - [输入/输出] 原始图像,格式为32位BGRA格式,执行后修为结果图像width - [输入] 原始图像宽度height - [输入] 原始图像高度stride - [输入] 原始图像的Stride(也就是行字节数width*4)highThreshold - [输入] 高阈值,范围为[0,255]lowThreshold - [输入] 低阈值,范围为[0,255],默认值为0.4*highThreshold
返 回: 0-成功,其他-失败.
*************************************************///单通道灰度化
static int grayOneChannel(unsigned char* srcData, unsigned char* grayData, int width, int height, int stride)
{int ret = 0;int i, j, gray, offset;offset = stride - (width * 4);unsigned char* pSrc = srcData;unsigned char* pGray = grayData;for (j = 0; j < height; j++){for (i = 0; i < width; i++){gray = (pSrc[2] + pSrc[1] + pSrc[0]) / 3;*pGray = gray;pSrc += 4;pGray++;}pSrc += offset;}return ret;
};//梯度相位角获取
static void GetGradientDegree(unsigned char* srcBytes, int width, int height, float gradient[], unsigned char degree[], float* GradientMax)
{float gx, gy;int temp, pos;float div;float PI = 3.1415926f;float t = 180.0f / PI;for (int j = 1; j < height - 1; j++){for (int i = 1; i < width - 1; i++){pos = i + j * width;gx = srcBytes[pos + 1 - width] + srcBytes[pos + 1] + srcBytes[pos + 1] + srcBytes[pos + 1 + width] - srcBytes[pos - 1 - width] - (srcBytes[pos - 1] + srcBytes[pos - 1]) - srcBytes[pos - 1 + width];gy = srcBytes[pos - 1 - width] + srcBytes[pos - width] + srcBytes[pos - width] + srcBytes[pos + 1 - width] - srcBytes[pos - 1 + width] - (srcBytes[pos + width] + srcBytes[pos + width]) - srcBytes[pos + 1 + width];gradient[pos] = (float)sqrt((float)(gx * gx + gy * gy));if (*GradientMax < gradient[pos]){*GradientMax = gradient[pos];}if (gx == 0){temp = (gy == 0) ? 0 : 90;}else{div = gy / gx;if (div < 0){temp = (int)(180 - atan(-div) * t);}else{temp = (int)(atan(div) * t);}if (temp < 22.5f){temp = 0;}else if (temp < 67.5f){temp = 45;}else if (temp < 112.5f){temp = 90;}else if (temp < 157.5f){temp = 135;}elsetemp = 0;}degree[pos] = temp;}}
};//非极大值抑制
static void NonMaxMini(unsigned char* srcBytes, int width, int height, float gradient[], float GradientMax, unsigned char degree[])
{float leftPixel = 0, rightPixel = 0;int pos;for (int j = 1; j < height - 1; j++){for (int i = 1; i < width - 1; i++){pos = i + j * width;switch (degree[pos]){case 0:leftPixel = gradient[pos - 1];rightPixel = gradient[pos + 1];break;case 45:leftPixel = gradient[pos - 1 + width];rightPixel = gradient[pos + 1 - width];break;case 90:leftPixel = gradient[pos + width];rightPixel = gradient[pos - width];break;case 135:leftPixel = gradient[pos + 1 + width];rightPixel = gradient[pos - 1 - width];break;default:break;}if ((gradient[pos] < leftPixel) || (gradient[pos] < rightPixel)){srcBytes[pos] = 0;}else{srcBytes[pos] = (int)(255.0f * gradient[pos] / GradientMax);}}}
};//双阈值边缘判断
static void TwoThreshouldJudge(unsigned char* srcBytes, int width, int height, int highThreshold, int lowThreshould)
{int pos = 0;for (int j = 1; j < height - 1; j++){for (int i = 1; i < width - 1; i++){pos = i + j * width;if (srcBytes[pos] > highThreshold){srcBytes[pos] = 255;}else if (srcBytes[pos] < lowThreshould){srcBytes[pos] = 0;}else{if (srcBytes[pos - 1 - width] < highThreshold && srcBytes[pos - width] < highThreshold && srcBytes[pos + 1 - width] < highThreshold && srcBytes[pos - 1] < highThreshold&& srcBytes[pos + 1] < highThreshold && srcBytes[pos - 1 + width] < highThreshold && srcBytes[pos + width] < highThreshold && srcBytes[pos + 1 + width] < highThreshold){srcBytes[pos] = 0;}elsesrcBytes[pos] = 255;}}}
};int cannyEdgedetection(unsigned char* srcData, int width, int height, int stride, int highThreshold, int lowThreshold)
{int ret = 0;int i, j, offset, pos, temp, size;unsigned char* pSrc = srcData;size = width * height;unsigned char* grayData = (unsigned char*)malloc(sizeof(unsigned char) * size);memset(grayData, 0, sizeof(unsigned char) * size);offset = stride - width * 4;//graygrayOneChannel(srcData, grayData, width, height, stride);//gauss fiterfor (j = 0; j < height; j++){for (i = 0; i < width; i++){pos = i + j * width;if (i == 0 || j == 0 || i == width - 1 || j == height - 1){grayData[pos] = 0;}else{temp = ((grayData[pos] << 2) + grayData[pos - width - 1] + grayData[pos + 1 - width] + grayData[pos - 1 + width] + grayData[pos + 1 + width] + grayData[pos - width] + grayData[pos - width] + grayData[pos - 1] + grayData[pos - 1] + grayData[pos + width] + grayData[pos + width] + grayData[pos + 1] + grayData[pos + 1]) >> 4;grayData[pos] = temp;}}}//gradientfloat* gradient = (float*)malloc(sizeof(float) * size);memset(gradient, 0, sizeof(float) * size);unsigned char* degree = (unsigned char*)malloc(sizeof(unsigned char) * size);memset(degree, 0, sizeof(unsigned char) * size);float GradientMax = 0;GetGradientDegree(grayData, width, height, gradient, degree, &GradientMax);//none max value NonMaxMini(grayData, width, height, gradient, GradientMax, degree);//two threshold judgementTwoThreshouldJudge(grayData, width, height, highThreshold, lowThreshold);//recoveryfor (j = 0; j < height; j++){for (i = 0; i < width; i++){pSrc[0] = pSrc[1] = pSrc[2] = grayData[i + j * width];pSrc += 4;}pSrc += offset;}free(grayData);free(gradient);free(degree);return ret;
};4 演示Demo
4.1 开发环境
-
Windows 10 Pro x64
-
Visual Studio 2015
4.2 功能介绍
演示程序主界面如下图所示,具有图像读取、显示、保存、显示RGBA值、HSV调整、提取YUV分量、灰度化、二值化、直方图、亮度/对比度调整、饱和度调整、均值滤波、高斯滤波、拉普拉斯锐化、USM锐化、Sobel边缘检测、Canny边缘检测等功能。

原图

Sobel边缘检测(阈值为80 )效果图

Canny边缘检测(阈值为 8)效果图
4.3 下载地址
开发环境:
-
Windows 10 pro x64
-
Visual Studio 2015
下载地址:图像处理之图像边缘检测算法Demo
参考
图像视频滤镜与人像美颜美妆算法详解. 胡耀武、谭娟、李云夕. 电子工业出版社、2020-07
相关文章:
图像处理之图像边缘检测算法
目录 1 图像边缘检测算法简介 2 Sobel边缘检测 3 经典的Canny边缘检测算法 4 演示Demo 4.1 开发环境 4.2 功能介绍 4.3 下载地址 参考 1 图像边缘检测算法简介 图像边缘检测是计算机视觉和图像处理中的基本问题,主要目的是提取图像中明暗变化明显的边缘细节…...

第二十五 :搭建 pinia 环境
第一步:npm install pinia 第二步:操作src/main.ts import { createApp } from vue import App from ./App.vue /* 引入createPinia,用于创建pinia */ import { createPinia } from pinia /* 创建pinia */ const pinia createPinia(…...

学习Java数组操作:从基础到高级技巧详解
在Java编程中,数组是一种非常基础且常用的非 primitives 数据结构,它用于存储一组相同类型的值。无论是数据处理、遍历还是其他操作,数组都是一个不可或缺的工具。本文将从数组的基本概念开始,逐步介绍常用的操作方法,…...

算法题(79):两个数组的交集
审题: 本题需要我们查找两个给定数组的无重复数据交集,并以数组的形式返回 思路: 方法一:set 之前我们学习过unordered_set的使用,但是unordered_set是无序的,而这里我们的比对算法需要有序数据,…...

TFChat:腾讯大模型知识引擎+飞书机器人实现AI智能助手
效果 TFChat项目地址 https://github.com/fish2018/TFChat 腾讯大模型知识引擎用的是DeepSeek R1,项目为sanic和redis实现,利用httpx异步处理流式响应,同时使用buffer来避免频繁调用飞书接口更新卡片的网络耗时。为了进一步减少网络IO消耗&…...

Linux红帽:RHCSA认证知识讲解(四)修改远程配置文件,取消root禁用,便于使用root身份远程
Linux红帽:RHCSA认证知识讲解(四)修改远程配置文件,取消root禁用,便于使用root身份远程 前言一、远程连接的用途和原因二、通过 ssh 远程登陆系统三、默认限制及解决方案(一)非常规方法一&#…...
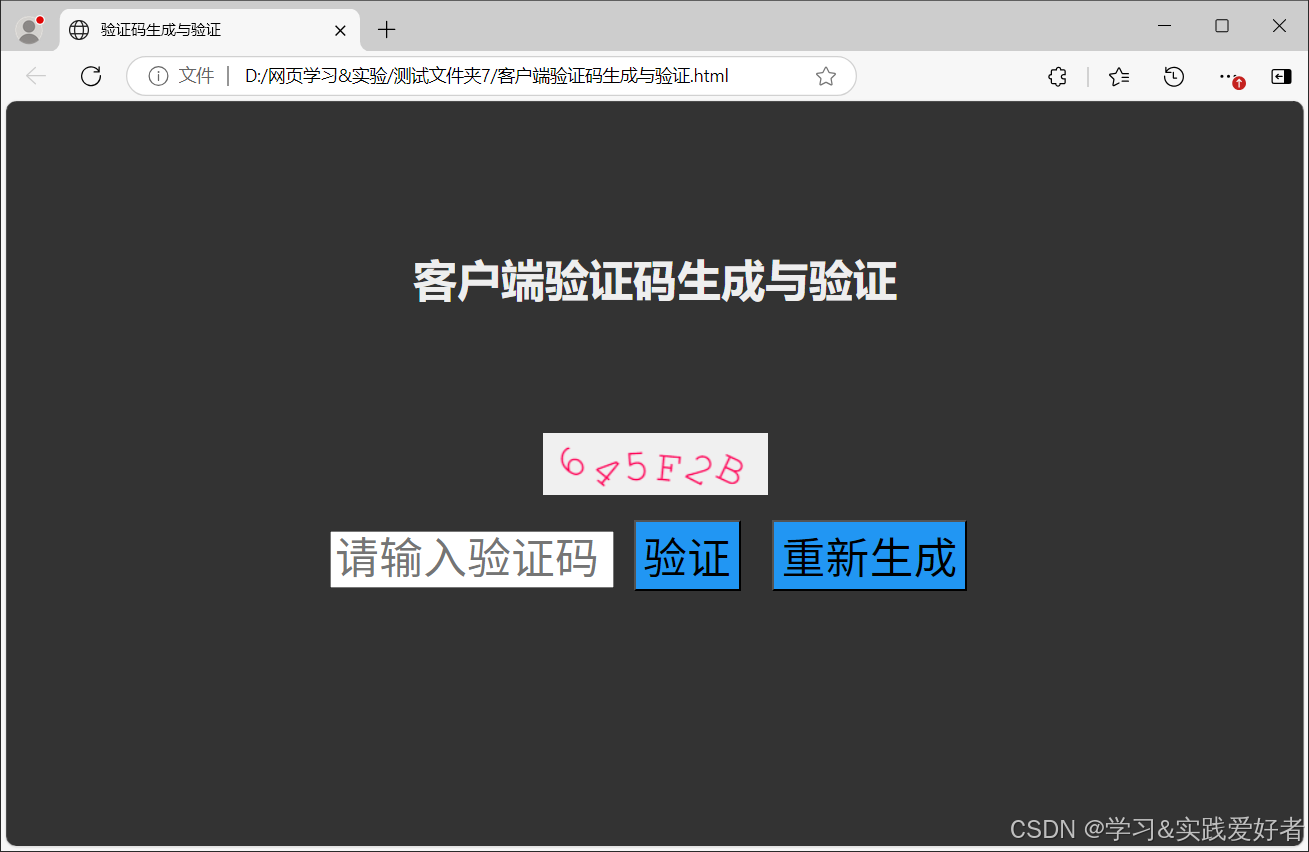
验证码介绍及生成与验证(HTML + JavaScript实现)
验证码介绍及生成与验证(HTML JavaScript实现) 验证码 验证码(全自动区分计算机和人类的图灵测试,CAPTCHA ,Completely Automated Public Turing test to tell Computers and Humans A…...

文心一言AI创意画
介绍 文心一言是百度推出的新一代知识增强大语言模型,属于文心大模型家族的新成员。它能够与人对话互动、回答问题、协助创作,高效便捷地帮助人们获取信息、知识和灵感。 特点 文心一言基于数万亿数据和数千亿知识进行融合学习,采用预训…...

WebRTC解析
一、WebRTC 协议概述 WebRTC(Web Real-Time Communication)是由 Google 发起并成为 W3C 标准的实时音视频通信技术,核心特点: 零插件:浏览器原生支持端到端加密(SRTP DTLS)P2P 优先架构&…...

升级Office软件后,Windows 系统右键里没有新建Word、Excel、PowerPoint文件的解决办法
我办公用的电脑,Office 2013 已经用了好多年,最近突发奇想给升级到了 Ofiice 2024。升级过程还蛮顺利的,但是安装完成后,发现点右键里没有新建Word、Excel、PowerPoint,开始菜单里 Word、Excel、PowerPoint 使用都正常…...

车载DoIP诊断框架 --- 连接 DoIP ECU/车辆的故障排除
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 简单,单纯,喜欢独处,独来独往,不易合同频过着接地气的生活,除了生存温饱问题之外,没有什么过多的欲望,表面看起来很高冷,内心热情,如果你身…...

洛谷每日1题-------Day4__陶陶摘苹果
# P1046 [NOIP 2005 普及组] 陶陶摘苹果 ## 题目描述 陶陶家的院子里有一棵苹果树,每到秋天树上就会结出 $10$ 个苹果。苹果成熟的时候,陶陶就会跑去摘苹果。陶陶有个 $30$ 厘米高的板凳,当她不能直接用手摘到苹果的时候,就会踩…...
萌新学 Python 之模块管理
模块就是一个 python 代码文件,模块可以包含函数、类,可以提高代码复用率提高效率 python 模块主要分为三种: 1.内置模块:python 自带的模块,导入后可以直接使用,比如 import 模块名 2.第三方模块&#…...

6.3 - UART串口数据发送之中断
文章目录 1 实验任务2 系统框图3 软件设计 1 实验任务 本实验使用中断方式实现UART串口数据的连续发送。 2 系统框图 参见6.1。 3 软件设计 注意事项: 系统上电、程序下载后,此时TX FIFO虽然为空,但并不会触发空中断;空中断…...
与自然梯度下降:机器学习中的优化利器)
Fisher信息矩阵(Fisher Information Matrix, FIM)与自然梯度下降:机器学习中的优化利器
Fisher信息矩阵与自然梯度下降:机器学习中的优化利器 在机器学习尤其是深度学习中,优化模型参数是一个核心任务。我们通常依赖梯度下降(Gradient Descent)来调整参数,但普通的梯度下降有时会显得“笨拙”,…...
)
Mysql基础-多表查询(详细版)
目录 一、表的关系类型与适用场景二、连接方式与使用场景三、易错点与注意事项四、总结 一、表的关系类型与适用场景 1. 一对一关系 场景:一个表的记录对应另一个表的唯一记录 案例:用户表 用户详情表 CREATE TABLE users (id INT PRIMARY KEY,name…...

港科大提出开放全曲音乐生成基础模型YuE:可将歌词转换成完整歌曲
YuE是港科大提出的一个开源的音乐生成基础模型,专为音乐生成而设计,专门用于将歌词转换成完整的歌曲(lyrics2song)。它可以生成一首完整的歌曲,时长几分钟,包括朗朗上口的声乐曲目和伴奏曲目。YuE 能够模拟…...

Python学习第十七天之PyTorch保姆级安装
PyTorch安装与部署 一、准备工作二、pytorch介绍三、CPU版本pytorch安装1. 创建虚拟环境2. 删除虚拟环境1. 通过环境名称删除2. 通过环境路径删除 3. 配置镜像源4. 安装pytorch1. 首先激活环境变量2. 进入pytorch官网,找到安装指令 5. 验证pytorch是否安装成功 四、…...

有关与 WSL 2 的主要区别的信息,请访问 https://aka.ms/wsl2
https://learn.microsoft.com/zh-cn/windows/wsl/install-manual#step-4—download-the-linux-kernel-update-package...

什么是 Java 中的线程安全?
回答 Java 中的线程安全(Thread Safety)指的是在多线程环境下,当多个线程同时访问和操作共享资源(如对象、变量、数据结构等)时,能够保证程序的正确性,不会出现数据不一致、竞争条件࿰…...
)
从测速到配置:一套完整的cFosSpeed网络加速保姆级教程(适用于小白)
从零开始掌握cFosSpeed:网络加速全流程实战指南对于经常进行在线游戏、视频会议或大文件传输的用户来说,网络延迟和带宽利用率低下往往是影响体验的关键痛点。cFosSpeed作为一款专业的网络流量优化工具,能够显著改善这些问题,但许…...

【DeepSeek测试用例生成实战指南】:20年QA专家亲授5大高覆盖率生成模式与3个避坑红线
更多请点击: https://codechina.net 第一章:DeepSeek测试用例生成的核心价值与适用边界 DeepSeek系列大模型在代码理解与生成任务中展现出显著的上下文建模能力,其测试用例生成功能并非通用“黑盒测试器”,而是聚焦于**单元级、函…...

别再盲跑了!手把手教你用Arduino Zero在IDE 2.0里设置断点单步调试
告别盲跑时代:Arduino Zero与IDE 2.0的源码级调试实战指南 当你的Arduino项目逻辑越来越复杂,仅靠串口打印调试就像在迷宫里摸黑前行——直到遇见Arduino Zero与IDE 2.0的调试组合。本文将揭示如何用这套工具实现 源码级精准调试 ,即使你手…...
)
Windows 10/11系统下,SecureCRT 8.7.2保姆级安装与激活图文指南(含Keygen使用避坑点)
Windows平台SecureCRT 8.7.2全流程部署与安全配置指南在当今远程运维与网络管理的日常工作中,一款可靠的终端仿真工具如同工程师的瑞士军刀。作为行业标杆的SecureCRT,其8.7.2版本在Windows 10/11环境下的部署却常让新手陷入各种技术陷阱——从安装路径选…...

Vulnhub-DC-1
1.信息收集 使用工具nmap扫描主机端口 这是Drupal是使用PHP语言编写的开源内容管理框架(CMF),它由内容管理系统(CMS)和PHP开发框架(Framework)共同构成 Web指纹扫描 发现是:drupal…...

Unity UI交互进阶:手把手教你打造一个支持单击、双击、长按的万能按钮组件
Unity UI交互进阶:手把手教你打造一个支持单击、双击、长按的万能按钮组件在游戏开发中,UI交互的流畅性和多样性直接影响玩家的游戏体验。想象一下,当你在开发一个RPG游戏的背包系统时,需要实现道具的单击查看详情、双击快速使用、…...

账务台账数据
银行里说的 “账务台账数据”,本质就是按会计规则把每笔业务逐笔、分户、分科目记下来的完整明细流水 余额 辅助信息,核心是 “可逐笔追溯、可对账、可审计” 的一套明细数据。下面用通俗、具体的方式拆开说:一、银行 “账务台账” 到底是什…...

Office RibbonX Editor:简单三步打造你的专属Office界面
Office RibbonX Editor:简单三步打造你的专属Office界面 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/gh_mirrors/of/office-ribbonx-edit…...

具身智能:面向新兴交叉学科建设的思考与建议 2026
这份由 CCF YOCSEF 长三角五地学术委员会 2026 年 5 月发布的白皮书,聚焦具身智能作为新兴交叉学科的建设,明确其并非 AI 与机器人学的简单拼接,而是围绕物理交互中的智能行为形成的新问题域,提出 “三大基本问题 一个应用需求”…...

ShrinkBox后门攻击:如何让自动驾驶模型“看错”距离,威胁ML-ADAS安全
1. 项目概述在自动驾驶和高级驾驶辅助系统(ADAS)领域,基于机器学习的目标检测模型,如YOLO系列,已成为感知环境、实现碰撞预警的核心组件。这些模型通过实时识别和定位道路上的车辆、行人等目标,为后续的距离…...