Go中slice和map引用传递误区
背景
关于slice和map是指传递还是引用传递,很多文章都分析得模棱两可,其实在Go中只有值传递,但是很多情况下是因为分不清slice和map的底层实现,所以导致很多人在这一块产生疑惑,下面通过代码案例分析slice和map到底是值传递还是引用传递。
案例分析
func main() {list := make([]int, 10)fmt.Printf("list addr:%p\n", list)fmt.Println("list size:", len(list))listExpand(list)fmt.Println("expand list size:", len(list))m := make(map[int]int, 0)fmt.Printf("map addr:%p\n", m)fmt.Println("map size:", len(m))mapExpand(m)fmt.Println("expand size:", len(m))
}func mapExpand(m map[int]int) {for i := range 10 {m[i] = i}fmt.Printf("expand map addr:%p\n", m)
}func listExpand(list []int) {for i := range 10 {list = append(list, i)}fmt.Printf("expand list addr:%p\n", list)
}上面代码的输出结果:
list addr:0xc000010500
list size: 10
expand list addr:0xc0000220a0
expand list size: 10
map addr:0xc00001e180
map size: 0
expand map addr:0xc00001e180
expand size: 10
可以清楚的看到,都没有使用指针的情况下,两者的结果都不一样,map在扩容前后都是同一个内存地址,但是slice在没扩容都不为同一个内存地址。
可能会更疑惑了,这结果是想说明,map是引用传递,slice是值传递吗?
在Go的1.8版本源码中
hashmap的make实现如下:

可以清楚的看到,通过make创建的map其实返回的是hamp结构体的指针。
slice的make实现如下:

可以清楚的看到,通过make创建的slice其实返回的是slice的结构体,并不是指针。
所以,结论很清晰了,其实Go中只有值传递,因为各个引用类型底层实现的不同导致的结果不一致,因为创建map返回的是指针,所以传递map时,扩容了也不会导致和预期不一样的结果;而slice的创建返回的是结构体,如果扩容了,则会导致底层数组的变化,不一定是预期的结果。
相关文章:
Go中slice和map引用传递误区
背景 关于slice和map是指传递还是引用传递,很多文章都分析得模棱两可,其实在Go中只有值传递,但是很多情况下是因为分不清slice和map的底层实现,所以导致很多人在这一块产生疑惑,下面通过代码案例分析slice和map到底是…...

C# Unity 唐老狮 No.2 模拟面试题
本文章不作任何商业用途 仅作学习与交流 安利唐老狮与其他老师合作的网站,内有大量免费资源和优质付费资源,我入门就是看唐老师的课程 打好坚实的基础非常非常重要: Unity课程 - 游习堂 - 唐老狮创立的游戏开发在线学习平台 - Powered By EduSoho 如果你发现了文章内特殊的字体…...

【Uniapp-Vue3】开发userStore用户所需的相关操作
在项目根路径下创建的stores文件夹中创建user.js文件 并将以下内容复制到user.js中 import {ref} from "vue" import { defineStore } from pinia; const uniIdCo uniCloud.importObject("uni-id-co") const db uniCloud.database(); const usersTable…...

DeepSeek开源周首日:发布大模型加速核心技术可变长度高效FlashMLA 加持H800算力解码性能狂飙升至3000GB/s
FlashMLA的核心技术特性包括对BF16精度的全面支持,以及采用块大小为64的页式键值缓存(Paged KV Cache)系统,实现更精确的内存管理。在性能表现方面,基于CUDA12.6平台,FlashMLA在H800SXM5GPU上创下了显著成绩…...
易语言模拟真人鼠标轨迹算法 - 防止游戏检测
一.简介 鼠标轨迹算法是一种模拟人类鼠标操作的程序,它能够模拟出自然而真实的鼠标移动路径。 鼠标轨迹算法的底层实现采用C/C语言,原因在于C/C提供了高性能的执行能力和直接访问操作系统底层资源的能力。 鼠标轨迹算法具有以下优势: 模拟…...

DeepSeek 提示词:基础结构
🧑 博主简介:CSDN博客专家,历代文学网(PC端可以访问:https://literature.sinhy.com/#/?__c1000,移动端可微信小程序搜索“历代文学”)总架构师,15年工作经验,精通Java编…...

文件系统
目录 1.认识磁盘 磁盘的物理结构 CHS定位法 磁盘的逻辑结构 2.认识文件系统 inode 分区和分组 磁盘上的文件系统 3.软硬链接 软链接 软链接的操作 创建软链接 查看软链接 删除软链接 软链接的特点 软链接的使用场景 硬链接 硬链接的操作 创建硬链接 查看硬…...

力扣LeetCode:1472 设计浏览器历史记录
题目: 你有一个只支持单个标签页的 浏览器 ,最开始你浏览的网页是 homepage ,你可以访问其他的网站 url ,也可以在浏览历史中后退 steps 步或前进 steps 步。 请你实现 BrowserHistory 类: BrowserHistory(string h…...

【FL0091】基于SSM和微信小程序的社区二手物品交易小程序
🧑💻博主介绍🧑💻 全网粉丝10W,CSDN全栈领域优质创作者,博客之星、掘金/知乎/b站/华为云/阿里云等平台优质作者、专注于Java、小程序/APP、python、大数据等技术领域和毕业项目实战,以及程序定制化开发…...

【笔记ing】每天50个英语词汇
ex- e-out exclude 排外,排除 expect 期待,期望 单词构成: 前缀(prefix):情感(emotion)方向(orientation) 词根(root)…...

联想 SR590 服务器 530-8i RAID 控制器更换损坏的硬盘
坏了的硬盘会自动亮黄灯。用一个空的新盘来替换,新盘最好不要有东西。但是有东西可能也没啥,因为我看 RAID 控制器里有格式化的选项 1. 从 IPMI 把服务器关机,电源键进入绿色闪烁状态 2. 断电,推开塑料滑块拉出支架,…...

Java基础关键_012_包装类
目 录 一、基本数据类型对应的包装类 1.概览 2.说明 二、包装类 1.最大值与最小值 2.构造方法 3.常用方法(Integer为例) (1)compare(int x, int y) (2)max(int a, int b) 和 min(int a, int b) &…...

【react】TypeScript在react中的使用
目录 一、环境与项目配置 1. 创建 TypeScript React 项目 2. 关键tsconfig.json配置 3.安装核心类型包 二、组件类型定义 1. 函数组件(React 18) 2.类组件 三、Hooks 的深度类型集成 1. useState 2. useEffect 3. useRef 4. 自定义 Hook 四、事…...

vllm的使用方式,入门教程
vLLM是一个由伯克利大学LMSYS组织开源的大语言模型推理框架,旨在提升实时场景下的大语言模型服务的吞吐与内存使用效率。以下是详细的vLLM使用方式和入门教程: 1. 前期准备 在开始使用vLLM之前,建议先掌握一些基础知识,包括操作…...

IDEA 使用codeGPT+deepseek
一、环境准备 1、IDEA 版本要求 安装之前确保 IDEA 处于 2023.x 及以上的较新版本。 2、Python 环境 安装 Python 3.8 或更高版本 为了确保 DeepSeek 助手能够顺利运行,您需要在操作系统中预先配置 Python 环境。具体来说,您需要安装 Python 3.8 或更高…...

vue3中测试:单元测试、组件测试、端到端测试
1、单元测试:单元测试通常适用于独立的业务逻辑、组件、类、模块或函数,不涉及 UI 渲染、网络请求或其他环境问题。 describe(increment, () > {// 测试用例 }) toBe():用于严格相等比较(),适用于原始类…...

机器学习介绍与数据集
一、机器学习介绍与定义 1.1 机器学习定义 机器学习(Machine Learning)是让计算机从数据中自动学习规律,并依据这些规律对未来数据进行预测的技术。它涵盖聚类、分类、决策树、贝叶斯、神经网络、深度学习(Deep Learning…...
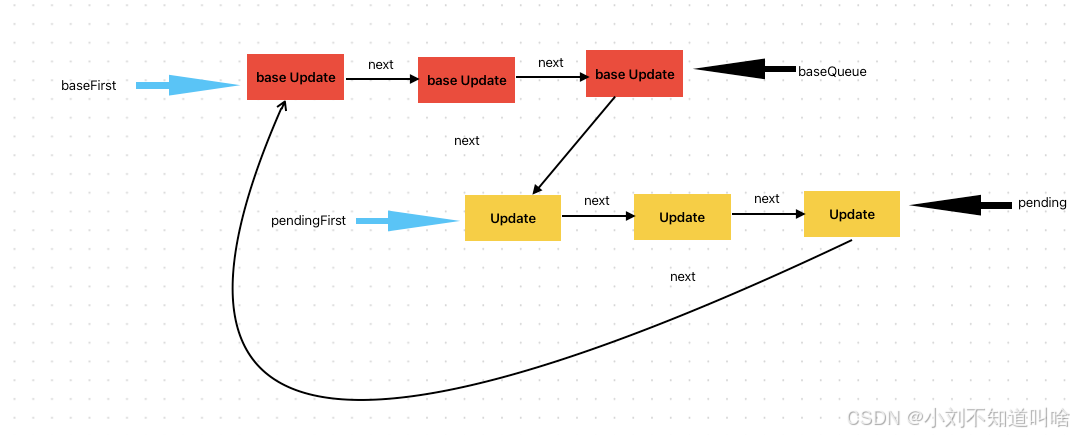
React 源码揭秘 | 更新队列
前面几篇遇到updateQueue的时候,我们把它先简单的当成了一个队列处理,这篇我们来详细讨论一下这个更新队列。 有关updateQueue中的部分,可以见源码 UpdateQueue实现 Update对象 我们先来看一下UpdateQueue中的内容,Update对象&…...

关于网络端口探测:TCP端口和UDP端口探测区别
网络端口探测是网络安全领域中的一项基础技术,它用于识别目标主机上开放的端口以及运行在这些端口上的服务。这项技术对于网络管理和安全评估至关重要。在网络端口探测中,最常用的两种协议是TCP(传输控制协议)和UDP(用…...

Vue.js 中使用 JSX 自定义语法封装组件
Vue.js 中使用 JSX 自定义语法封装组件 在 Vue.js 开发中,使用模板语法是常见的构建用户界面方式,但对于一些开发者,特别是熟悉 JavaScript 语法的,JSX 提供了一种更灵活、更具表现力的替代方案。通过 JSX,我们可以在…...

无机布防火卷帘门报价透明,包工包料,一次说清所有费用
很多客户在选购无机布防火卷帘门时,最关心实际成交价格,也担心报价不清晰,后期产生各类额外支出。行业内产品定价参差不齐,选材做工不同,最终价位自然存在差距,挑选时不能只看表面低价。 👉 点击…...

除了ulimit -c unlimited:深入理解Linux core dump机制与高级配置指南
深入Linux核心转储:从基础配置到生产环境实战指南当服务器上的关键应用突然崩溃时,系统管理员最需要的就是一份完整的"事故现场记录"。Linux的core dump机制正是为此而生,它能保存程序崩溃时的内存状态、寄存器值和调用堆栈&#x…...

【CP-05】RTE运行时环境 - SWC的操作系统接口
CP-05_RTE运行时环境【CP-05】RTE运行时环境 - SWC的“操作系统接口”前言在AUTOSAR架构中,RTE(Runtime Environment,运行时环境)是一个常被提及却难以理解的概念。它像是应用层软件组件(SW-C)与底层基础软…...

别再死记硬背了!用5个生活化比喻彻底搞懂Linux进程的fork、exec和wait
别再死记硬背了!用5个生活化比喻彻底搞懂Linux进程的fork、exec和wait想象你正在厨房准备一顿大餐。菜谱上写着"切菜"、"炒菜"、"装盘"等步骤,但突然发现需要同时处理多道菜品——这时候,你会本能地让家人分工…...

孤舟笔记 互联网常用框架篇三 Dubbo是如何动态感知服务下线的?注册中心和服务端双保险
文章目录先说结论机制一:注册中心通知机制二:心跳检测机制三:连接事件感知机制四:定时拉取四种机制的协作回答技巧与点评加分回答面试官点评个人网站微服务环境下,服务实例随时可能上下线——重启、扩容、宕机……调用…...

如何快速上手DeepPurpose?5分钟完成你的第一个药物-靶点相互作用预测模型
如何快速上手DeepPurpose?5分钟完成你的第一个药物-靶点相互作用预测模型 【免费下载链接】DeepPurpose A Deep Learning Toolkit for DTI, Drug Property, PPI, DDI, Protein Function Prediction (Bioinformatics) 项目地址: https://gitcode.com/gh_mirrors/de…...

如何用WaveTools终极优化《鸣潮》游戏性能:从卡顿到丝滑的完整指南
如何用WaveTools终极优化《鸣潮》游戏性能:从卡顿到丝滑的完整指南 【免费下载链接】WaveTools 🧰鸣潮工具箱 项目地址: https://gitcode.com/gh_mirrors/wa/WaveTools 如果你正在玩《鸣潮》却频繁遭遇帧率波动、画面卡顿或操作延迟,那…...

别再死记硬背了!用UE材质里的点积、叉积,5分钟搞定模型表面动态光效
用UE材质玩转动态光效:点积、叉积实战指南第一次接触UE材质编辑器时,看到那些密密麻麻的数学节点总让人头皮发麻。特别是"点积"、"叉积"这些听起来就很高深的术语,很容易让美术背景的创作者望而却步。但你知道吗…...

在模型广场灵活选型让我找到了更适合代码生成的Taotoken模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在模型广场灵活选型让我找到了更适合代码生成的Taotoken模型 开发代码辅助工具时,选择合适的模型是平衡效果与成本的关…...

3步快速解密中兴光猫配置:ZET工具终极实战指南
3步快速解密中兴光猫配置:ZET工具终极实战指南 【免费下载链接】ZET-Optical-Network-Terminal-Decoder 项目地址: https://gitcode.com/gh_mirrors/ze/ZET-Optical-Network-Terminal-Decoder 中兴光猫配置解密工具是每个网络管理员必备的神器!Z…...