【星云 Orbit-F4 开发板】07. 用判断数据尾来接收据的串口通用程序框架
【星云 Orbit-F4 开发板】用判断数据尾来接收一串数据的串口通用程序框架
摘要
本文介绍了一种基于STM32F407微控制器的串口数据接收通用程序框架。该框架通过判断数据尾来实现一串数据的完整接收,适用于需要可靠数据传输的应用场景。本文从零开始,详细讲解了STM32F407串口基础知识、配置步骤、HAL库函数详解,并提供了完整的代码示例和注释。目标读者为嵌入式开发小白,内容通俗易懂,适合快速上手。
1. 引言
在嵌入式开发中,串口通信是一种常用的通信方式。本文旨在解决一个常见问题:如何通过STM32F407的串口接收一串数据,并通过判断数据尾来确保数据的完整性。
本文将从零开始,逐步讲解以下内容:
- 基础知识:STM32F407串口的基本概念和工作机制。
- 配置步骤:如何手动配置STM32F407的串口(不使用STM32CubeMX)。
- HAL库函数详解:如何使用STM32 HAL库实现串口接收功能。
- 代码实现:提供完整的代码框架和注释。
- 使用示例:通过实际案例展示如何使用该框架。
2. 基础知识
2.1 STM32F407的串口
STM32F407芯片集成了多个USART(Universal Synchronous Asynchronous Receiver Transmitter)模块,支持同步和异步通信模式。本文将使用USART1模块。
2.2 数据尾判断
在串口通信中,数据通常以帧的形式传输。为了确保数据的完整性,我们需要通过特定的标志(数据尾)来判断一帧数据是否传输完成。例如,可以使用固定的字节序列(如 0xEB 0x00 0x55)作为数据尾。
2.3 数据接收流程
数据接收流程如下:
- 初始化:配置串口参数(波特率、数据位、停止位等)。
- 接收数据:通过中断或轮询方式接收数据。
- 判断数据尾:在接收到数据后,检查是否包含数据尾标志。
- 处理数据:如果检测到数据尾,提取有效数据并进行后续处理。
3. 配置步骤
3.1 时钟配置
在使用串口之前,需要配置时钟系统。以下是关键配置步骤:
- 启用AHB1时钟:确保USART1时钟被启用。
- 配置系统时钟:设置系统时钟频率(本文假设为110.592 MHz)。
// 配置时钟
RCC->AHB1ENR |= RCC_AHB1ENR_GPIOAEN; // 启用GPIOA时钟
RCC->APB2ENR |= RCC_APB2ENR_USART1EN; // 启用USART1时钟
3.2 GPIO配置
配置GPIO引脚用于串口通信。本文使用PA9(TX)和PA10(RX)。
// 配置GPIO
GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.Pin = GPIO_PIN_9 | GPIO_PIN_10;
GPIO_InitStructure.Mode = GPIO_MODE_AF_PP;
GPIO_InitStructure.Pull = GPIO_PULLUP;
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStructure.Alternate = GPIO_AF7_USART1;HAL_GPIO_Init(GPIOA, &GPIO_InitStructure);
3.3 USART配置
配置USART参数,包括波特率、数据位、停止位和校验位。
// 配置USART
UART_HandleTypeDef huart1;huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_RX | UART_MODE_TX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;HAL_UART_Init(&huart1);
3.4 中断配置
启用USART接收中断。
// 配置中断NVIC_EnableIRQ(USART1_IRQn);
4. HAL库函数详解
4.1 HAL_UART_Init
初始化USART模块。
HAL_StatusTypeDef HAL_UART_Init(UART_HandleTypeDef *huart, UART_InitTypeDef *pInitStruct)
4.2 HAL_UART_Transmit
发送数据。
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
4.3 HAL_UART_Receive_IT
启用接收中断。
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
4.4 USART1_IRQHandler
USART中断服务函数。
void USART1_IRQHandler(void)
{if (__HAL_UART_GET_FLAG(&huart1, UART_FLAG_RXNE) != RESET){// 处理接收数据}
}
5. 代码实现
5.1 初始化函数
void SystemClock_Config(void)
{// 配置系统时钟
}void MX_USART1_UART_Init(void)
{// 配置USART1
}void MX_GPIO_Init(void)
{// 配置GPIO
}
5.2 数据接收函数
void USART1_IRQHandler(void)
{static uint8_t rxBuffer[RC_BUFFER_SIZE] = {0};static uint16_t rxIndex = 0;if (__HAL_UART_GET_FLAG(&huart1, UART_FLAG_RXNE) != RESET){rxBuffer[rxIndex++] = HAL_UART_Read_RX(&huart1);if (rxIndex >= RC_BUFFER_SIZE){// 数据尾判断if (CheckDataTail(rxBuffer, rxIndex)){// 处理数据ProcessData(rxBuffer, rxIndex);rxIndex = 0;}}}
}
5.3 数据处理函数
bool CheckDataTail(uint8_t *data, uint16_t length)
{// 检查数据尾
}void ProcessData(uint8_t *data, uint16_t length)
{// 处理数据
}
6. 使用示例
6.1 初始化
int main(void)
{// 初始化HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_USART1_UART_Init();// 启用接收中断HAL_UART_Receive_IT(&huart1, rxBuffer, RC_BUFFER_SIZE);while (1){// 主循环}
}
6.2 数据接收
void USART1_IRQHandler(void)
{// 中断处理
}
7. 总结
本文提供了一种基于STM32F407的串口数据接收通用程序框架。通过判断数据尾,确保了数据的完整性。本文从零开始,详细讲解了配置步骤和代码实现,适合嵌入式开发小白快速上手。
8. 附录
8.1 完整代码
#include "stm32f4xx_hal.h"#define RC_BUFFER_SIZE 100 // 接收缓冲区大小
#define DATA_TAIL_SIZE 3 // 数据尾长度uint8_t rxBuffer[RC_BUFFER_SIZE] = {0};
uint16_t rxIndex = 0;UART_HandleTypeDef huart1;void SystemClock_Config(void)
{// 配置系统时钟RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 25;RCC_OscInitStruct.PLL.PLLN = 336;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;RCC_OscInitStruct.PLL.PLLQ = 7;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){// 配置错误while (1);}RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){// 配置错误while (1);}
}void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;__HAL_RCC_GPIOA_CLK_ENABLE();GPIO_InitStructure.Pin = GPIO_PIN_9 | GPIO_PIN_10;GPIO_InitStructure.Mode = GPIO_MODE_AF_PP;GPIO_InitStructure.Pull = GPIO_PULLUP;GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;GPIO_InitStructure.Alternate = GPIO_AF7_USART1;HAL_GPIO_Init(GPIOA, &GPIO_InitStructure);
}void MX_USART1_UART_Init(void)
{huart1.Instance = USART1;huart1.Init.BaudRate = 9600;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;huart1.Init.Mode = UART_MODE_RX | UART_MODE_TX;huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart1.Init.OverSampling = UART_OVERSAMPLING_16;if (HAL_UART_Init(&huart1) != HAL_OK){// 配置错误while (1);}// 启用接收中断HAL_UART_Receive_IT(&huart1, rxBuffer, RC_BUFFER_SIZE);
}void USART1_IRQHandler(void)
{if (__HAL_UART_GET_FLAG(&huart1, UART_FLAG_RXNE) != RESET){rxBuffer[rxIndex++] = HAL_UART_Read_RX(&huart1);if (rxIndex >= RC_BUFFER_SIZE){if (CheckDataTail(rxBuffer, rxIndex)){ProcessData(rxBuffer, rxIndex);rxIndex = 0;}}}
}bool CheckDataTail(uint8_t *data, uint16_t length)
{if (length < DATA_TAIL_SIZE){return false;}// 检查数据尾if (data[length - 3] == 0xEB && data[length - 2] == 0x00 && data[length - 1] == 0x55){return true;}return false;
}void ProcessData(uint8_t *data, uint16_t length)
{// 处理数据
}int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_USART1_UART_Init();while (1){// 主循环}
}
8.2 思维导图
以下是基于STM32F407的串口数据接收程序框架的思维导图:

流程图说明
-
开始:程序启动。
-
系统初始化:配置STM32F407的硬件和外设。
- 配置时钟:配置系统时钟,确保外设时钟正确。
- 配置GPIO:配置与USART相关的GPIO引脚(如TX和RX引脚)。
- 配置USART:初始化USART外设,设置波特率、数据位、停止位和校验位。
-
数据接收:启用USART的接收中断,等待数据接收。
- 启用接收中断:配置USART的中断,使能接收中断。
- 中断服务函数:当接收到数据时,进入中断服务函数,读取接收到的数据。
-
数据处理:对接收到的数据进行处理。
- 检查数据尾:检查数据是否完整,确认数据尾。
- 处理数据:对接收到的数据进行解析或存储。
-
主循环:程序进入主循环,执行轮询任务。
- 执行轮询任务:在主循环中,执行一些周期性任务(如状态监控、按键扫描等)。
-
结束:程序结束。
8.3 状态转换图

- 初始化:程序开始,进入初始化状态。
- 配置时钟:配置系统时钟,确保外设时钟正确。
- 配置GPIO:配置与USART相关的GPIO引脚(如TX和RX引脚)。
- 配置USART:初始化USART外设,设置波特率、数据位、停止位和校验位。
- 启用接收中断:配置USART的中断,使能接收中断。
- 接收数据:等待数据接收。
- 接收中断:当接收到数据时,触发中断服务函数。
- 读取数据:在中断服务函数中,读取接收到的数据。
- 检查数据尾:检查数据尾是否存在,以确定数据是否完整。
- 数据尾存在:如果检测到数据尾,处理数据。
- 处理数据:对接收到的数据进行解析或存储。
- 重置接收索引:在数据处理完成后,重置接收索引,准备接收新的数据。
- 数据尾不存在:如果未检测到数据尾,继续接收数据。
- 主循环:程序进入主循环,执行轮询任务。
- 执行轮询任务:在主循环中,执行一些周期性任务(如状态监控、按键扫描等)。
- 结束:程序结束。
相关文章:
【星云 Orbit-F4 开发板】07. 用判断数据尾来接收据的串口通用程序框架
【星云 Orbit-F4 开发板】用判断数据尾来接收一串数据的串口通用程序框架 摘要 本文介绍了一种基于STM32F407微控制器的串口数据接收通用程序框架。该框架通过判断数据尾来实现一串数据的完整接收,适用于需要可靠数据传输的应用场景。本文从零开始,详细…...
)
LLVM - 编译器前端 - 将源文件转换为抽象语法树(一)
一:概述 编译器通常分为两部分——前端和后端。在本文中,我们将实现编程语言的前端部分——即主要处理源语言的部分。我们将学习现实世界编译器使用的技术,并将其应用到我们的编程语言中。 本文将从定义编程语言的语法开始,最终生成一个抽象语法树(AST),这是代码生成的基…...

02_NLP文本预处理之文本张量表示法
文本张量表示法 概念 将文本使用张量进行表示,一般将词汇表示为向量,称为词向量,再由各个词向量按顺序组成矩阵形成文本表示 例如: ["人生", "该", "如何", "起头"]># 每个词对应矩阵中的一个向量 [[1.32, 4,32, 0,32, 5.2],[3…...

深圳SMT贴片加工核心工艺解析
内容概要 深圳作为全球电子制造产业的核心集聚区,其SMT贴片加工技术始终引领行业创新方向。本文聚焦深圳电子制造企业在高密度、微型化组件加工中的核心工艺体系,系统解析从锡膏印刷到成品检测的全流程关键技术。通过梳理SMT产线中设备参数设定、工艺条…...
P8720 [蓝桥杯 2020 省 B2] 平面切分--set、pair
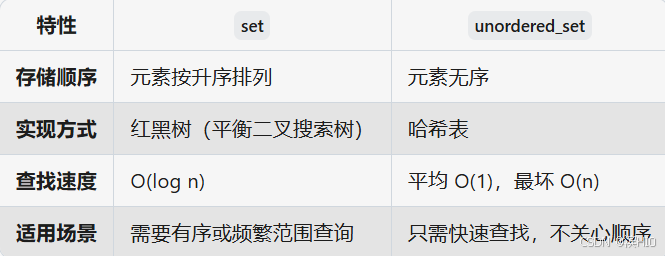
P8720 [蓝桥杯 2020 省 B2] 平面切分--set、pair 题目 分析一、pair1.1pair与vector的区别1.2 两者使用场景两者组合使用 二、set2.1核心特点2.2set的基本操作2.3 set vs unordered_set示例:统计唯一单词数代码 题目 分析 大佬写的很明白,看这儿 我讲讲…...

突破传统:用Polars解锁ICU医疗数据分析新范式
一、ICU数据革命的临界点 在重症监护室(ICU),每秒都在产生关乎生死的关键数据:从持续监测的生命体征到高频更新的实验室指标,从呼吸机参数到血管活性药物剂量,现代ICU每天产生的数据量级已突破TB级别。传统…...
命名实体识别与文本生成算法
在自然语言处理(NLP)的浩瀚星空中,命名实体识别(Named Entity Recognition, NER)与文本生成算法如同两颗璀璨的星辰,各自闪耀,又相互辉映,共同推动着人工智能技术在语言理解与生成领…...

10.3 指针进阶_代码分析
代码分析 9. 指针和数组代码解析一维数组字符数组字符串二维数组 10. 指针代码分析eg1eg2eg3eg4eg5eg6eg7eg8 10.1 指针进阶_数组指针 10.2 指针进阶_函数指针 9. 指针和数组代码解析 数组名arr是首元素地址 例外: 1. sizeof(arr),计算整个数组的大小&…...

深入理解推理语言模型(RLM)
大语言模型从通用走向推理,万字长文解析推理语言模型,建议收藏后食用。 本文基于苏黎世联邦理工学院的论文《Reasoning Language Models: A Blueprint》进行整理,你将会了解到: 1、RLM的演进与基础:RLM融合LLM的知识广…...

在Nginx上配置并开启WebDAV服务的完整指南
在Nginx上配置并开启WebDAV服务的完整指南 如何在 Nginx 上开启 WebDAV 服务 要在 Nginx 上开启 WebDAV 服务,你需要配置 Nginx 以支持 WebDAV 请求。以下是详细的步骤: 1. 确保 Nginx 安装了 WebDAV 模块 Nginx 的 WebDAV 功能由 http_dav_module 模…...

大语言模型学习
大语言模型发展历程 当前国内外主流LLM模型 一、国外主流LLM LLaMA2 Meta推出的开源模型,参数规模涵盖70亿至700亿,支持代码生成和多领域任务适配57。衍生版本包括Code Llama(代码生成优化)和Llama Chat(对…...

夜天之书 #106 Apache 软件基金会如何投票选举?
近期若干开源组织进行换届选举。在此期间,拥有投票权的成员往往会热烈讨论,提名新成员候选人和治理团队的候选人。虽然讨论是容易进行的,但是实际的投票流程和运作方式,在一个成员众多的组织中,可能会有不少成员并不清…...

从Aurora看Xanadu可扩展模块化光量子计算机的现状与未来展望
从Aurora看Xanadu可扩展光量子计算机的现状与未来展望 一、引言 1.1 研究背景与意义 随着信息技术的飞速发展,经典计算机在许多领域取得了巨大的成功,但在面对一些复杂问题时,其计算能力逐渐接近极限。量子计算机作为一种新型计算设备,基于量子力学原理,能够实现并行计算…...

WPS如何添加论文中的文献引用右上角小标
给参考文献标号 1、将光标位于参考文献之前,然后点击如下图所示位置 2、点击相应的列表,然后点击确定 然后选中第一行,点击格式刷,刷一下其余行 在原文中插入右上角的引用标 1、使光标位于想插入引用光标处,点击交叉…...

如何理解语言模型
统计语言模型 先看语言模型,语言即自然语言,模型及我们要解决的某个任务。 任务一:判断哪句话出现的概率大 任务二:预判空缺的位置最有可能是哪个词 再看统计,统计即解决上述两个任务的解决方法。先对语句进行分词…...

准确-NGINX 1.26.2配置正向代理并编译安装的完整过程
NGINX 1.26.2 配置正向代理并编译安装的完整过程,使用了 ngx_http_proxy_connect_module 模块。 1. 环境准备 1.1 安装依赖 确保系统安装了以下必要的依赖: sudo yum install -y gcc gcc-c make pcre-devel zlib-devel openssl-devel1.2 下载 NGINX 源…...

企业如何将ERP和BPM项目结合提升核心竞争力
无论是实施ERP项目还是BPM项目,企业变革的根本目的的确是为了让企业变得更加强大,更具竞争力。 这就像是练武功,无论是学习少林拳还是太极拳,最终的目标都是为了强身健体,提升战斗力。 如何将ERP和BPM项目有效结合以及…...

Linux内核以太网驱动分析
1.网络接口卡接收和发送数据在Linux内核中的处理流程如下: 1. 网络接口卡(Network Interface Card, NIC) 作用:负责物理层的数据传输,将数据包从网络介质(如以太网线)读取到内存中,或…...

分布式微服务系统架构第92集:智能健康监测设备Java开发方案
加群联系作者vx:xiaoda0423 仓库地址:https://webvueblog.github.io/JavaPlusDoc/ https://1024bat.cn 嗯,用户需要为血压、血糖、尿酸和血酮测试仪编写产品描述,同时涉及Java开发。首先,我得确定他们的需求是什么。可…...

【推荐项目】023-游泳俱乐部管理系统
023 游泳俱乐部管理系统 游泳俱乐部管理系统概述 前端技术框架: 我们优雅地采用了Vue.js作为游泳俱乐部管理系统的前端基础框架。Vue.js以其轻盈、高效和易于上手的特点,为我们的用户界面带来了极致的流畅性和响应速度。通过Vue.js,我们为…...

2026年PCB行业研究报告
随着全球算力需求爆发式增长,印制电路板(PCB)已从传统的电子连接载体,演进为决定AI集群信号完整性的核心物理瓶颈。PCB不仅是电子工业的母板,更是支撑人工智能与大数据等新质生产力落地的底层基石。当前,行…...

USB外设概率性不识别问题详解
第一种情况,CPU主机端口下外接一个4口的扩展hub,但是扩展的hub端口概率性无法识别外设。如下log: 04-14 12:33:46.119450[ 18.884163] usb 3-1.2: new high-speed USB device number 4 using xhci-hcd 04-14 12:33:46.200327[ 18.964548]…...

终极指南:如何在macOS上实现Windows风格的Alt-Tab窗口切换
终极指南:如何在macOS上实现Windows风格的Alt-Tab窗口切换 【免费下载链接】alt-tab-macos Windows alt-tab on macOS 项目地址: https://gitcode.com/gh_mirrors/al/alt-tab-macos 你是否曾在macOS上怀念Windows的Alt-Tab快速窗口切换体验?alt-…...
:LiveZoom 实时放大——无闪屏放大与多屏演示技巧)
《Sysinternals实战指南》ZoomIt 学习笔记(11.12):LiveZoom 实时放大——无闪屏放大与多屏演示技巧
🔥个人主页:杨利杰YJlio❄️个人专栏:《Sysinternals实战教程》《Windows PowerShell 实战》《WINDOWS教程》《IOS教程》《微信助手》《锤子助手》 《Python》 《Kali Linux》 《那些年未解决的Windows疑难杂症》🌟 让复杂的事情更…...

调查研究-142 全球机器人产业深度调研报告【04篇】机器人产业利润池全景:谁最容易赚钱与十大判断指标
TL;DR 场景:关注机器人产业投资、创业、就业方向的投资者、从业者、分析师结论:医疗机器人耗材/服务>高端核心零部件>系统集成>物流RaaS>工业本体>软件AI平台;人形机器人长期空间大但短期商业化仍早产出:三档利润池…...

微信小程序 社区老年人健康管理系统
目录同行可拿货,招校园代理 ,本人源头供货商项目背景核心功能技术实现服务模式社会效益项目技术支持源码获取详细视频演示 :同行可合作点击我获取源码->获取博主联系方式->进我个人主页-->同行可拿货,招校园代理 ,本人源头供货商 项目背景 随着老龄化社会…...

5分钟上手京东自动抢购工具:Python脚本让限量商品轻松到手
5分钟上手京东自动抢购工具:Python脚本让限量商品轻松到手 【免费下载链接】autobuy-jd 使用python语言的京东平台抢购脚本 项目地址: https://gitcode.com/gh_mirrors/au/autobuy-jd 还在为抢不到心仪商品而烦恼吗?Autobuy-JD京东自动抢购工具为…...
工业数据采集与断点续传)
(十)工业数据采集与断点续传
一、 工业物联网的致命伤:不稳定的网络环境在实验室或 IT 监控中,网络往往是稳定可靠的。但在工业现场,车间大型电机的电磁干扰、行车移动对光纤的拉扯、以及跨地域厂区的无线网络波动,会导致设备频繁出现“微离线”甚至长达数小时…...

千问 LeetCode 2565. 最少得分子序列 Java实现
这道题的核心思路是:删除t中的一个连续子串,让剩下的前缀后缀能拼成s的子序列。因为删除的区间越连续,得分(right - left 1)越小,所以我们本质上是在找最短的待删除子串长度。 下面给出Java实现ÿ…...

APKToolGUI:让Android逆向变得像搭积木一样简单
APKToolGUI:让Android逆向变得像搭积木一样简单 【免费下载链接】APKToolGUI GUI for apktool, signapk, zipalign and baksmali utilities. 项目地址: https://gitcode.com/gh_mirrors/ap/APKToolGUI 你是否曾经想要修改一个Android应用,却发现需…...