6. 机器人实现远程遥控(具身智能机器人套件)
1. 启动控制脚本
远程作到 Raspberry Pi 中,并运行以下脚本:
conda activate lerobotpython lerobot/scripts/control_robot.py \--robot.type=lekiwi \--control.type=remote_robot
登录笔记本电脑上,同时运行以下脚本:
conda activate lerobotpython lerobot/scripts/control_robot.py \--robot.type=lekiwi \--control.type=teleoperate \--control.fps=30
2. 控制
键盘功能可以在配置文件中修改(lerobot/common/robot_devices/robots/configs.py)
| 速度模式 | 线速度 (m/s) | 转速 (deg/s) |
|---|---|---|
| 快 | 0.4 | 90 |
| 中等 | 0.25 | 60 |
| 慢 | 0.1 | 30 |
| 按键 | 功能 |
|---|---|
| W | 前进 |
| A | 向左移动 |
| S | 向后移动 |
| D | 右移 |
| Z | 左转 |
| X | 右转 |
| R | 增速 |
| F | 降低速度 |
3. 对于笔记本直连控制
直接在笔记本2个终端直接执行两个指令即可
具身开源套件部分课程如下,欢迎联系合作采购(全套开源)
- 树莓派上配置机器人环境
- 电脑主机上配置机器人环境
- 机器人硬件组装
- 基于硬件更新软件配置
- 机器人标定
- 机器人远程遥控
- 机器人数据集记录
- 机器人模型训练与评估
相关文章:
)
6. 机器人实现远程遥控(具身智能机器人套件)
1. 启动控制脚本 远程作到 Raspberry Pi 中,并运行以下脚本: conda activate lerobotpython lerobot/scripts/control_robot.py \--robot.typelekiwi \--control.typeremote_robot登录笔记本电脑上,同时运行以下脚本: conda ac…...

多模态知识图谱融合
1.Knowledge Graphs Meet Multi-Modal Learning: A Comprehensive Survey 1.1多模态实体对齐 1.2多模态实体链接 研究进展&#...

windows 平台如何点击网页上的url ,会打开远程桌面连接服务器
你可以使用自定义协议方案(Protocol Scheme)实现网页上点击URL后自动启动远程桌面连接(mstsc),参考你提供的C代码思路,如下实现: 第一步:注册自定义协议 使用类似openmstsc://协议…...

基于Spark的热门动漫推荐数据分析与可视化系统的设计与实现(采用Python语言Django框架,Hadoop,spider爬虫等技术实现)
基于Hadoop的热门动漫推荐数据分析与可视化系统 基于Django的热门动漫推荐数据分析与可视化系统 1. 开发工具和实现技术 Pycharm, Python3.7,Django框架,Hadoop,Spark,Hive,spider爬虫(爬取动漫之家的动…...
)
8. 机器人模型训练与评估(具身智能机器人套件)
1. 训练 使用python lerobot/scripts/train.py可以进行机器人控制模型训练,一般需要几个小时,可以在outputs/train/act_lekiwi_test/checkpoints查看锚点数据,下面为一组示例参数: python lerobot/scripts/train.py \--dataset.…...

计算机网络-服务器模型
一.服务器模型 1.支持多客户端访问 //单循环服务器 socket bind listen while(1) { accept while(1) { recv/send } } close 注:该模式remvform为阻塞态,服务器将等待接收数据 2..支持多客户端同时访问 (并发能力) socket…...

DeepSeek大模型 —— 全维度技术解析
DeepSeek大模型 —— 全维度技术解析 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,可以分享一下给大家。点击跳转到网站。 https://www.captainbed.cn/ccc 文章目录 DeepSeek大模型 —— 全维度技术解析一、模型架构全景解析1…...

OSPF网络类型:NBMA与P2MP
一、NBMA网络 NBMA网络的特点 连接方式: 支持多台设备连接到同一个网络段,但网络本身不支持广播或组播。典型例子:帧中继、ATM。 DR/BDR选举: 由于网络不支持广播,OSPF需要手动配置邻居。 仍然会选举DR(…...
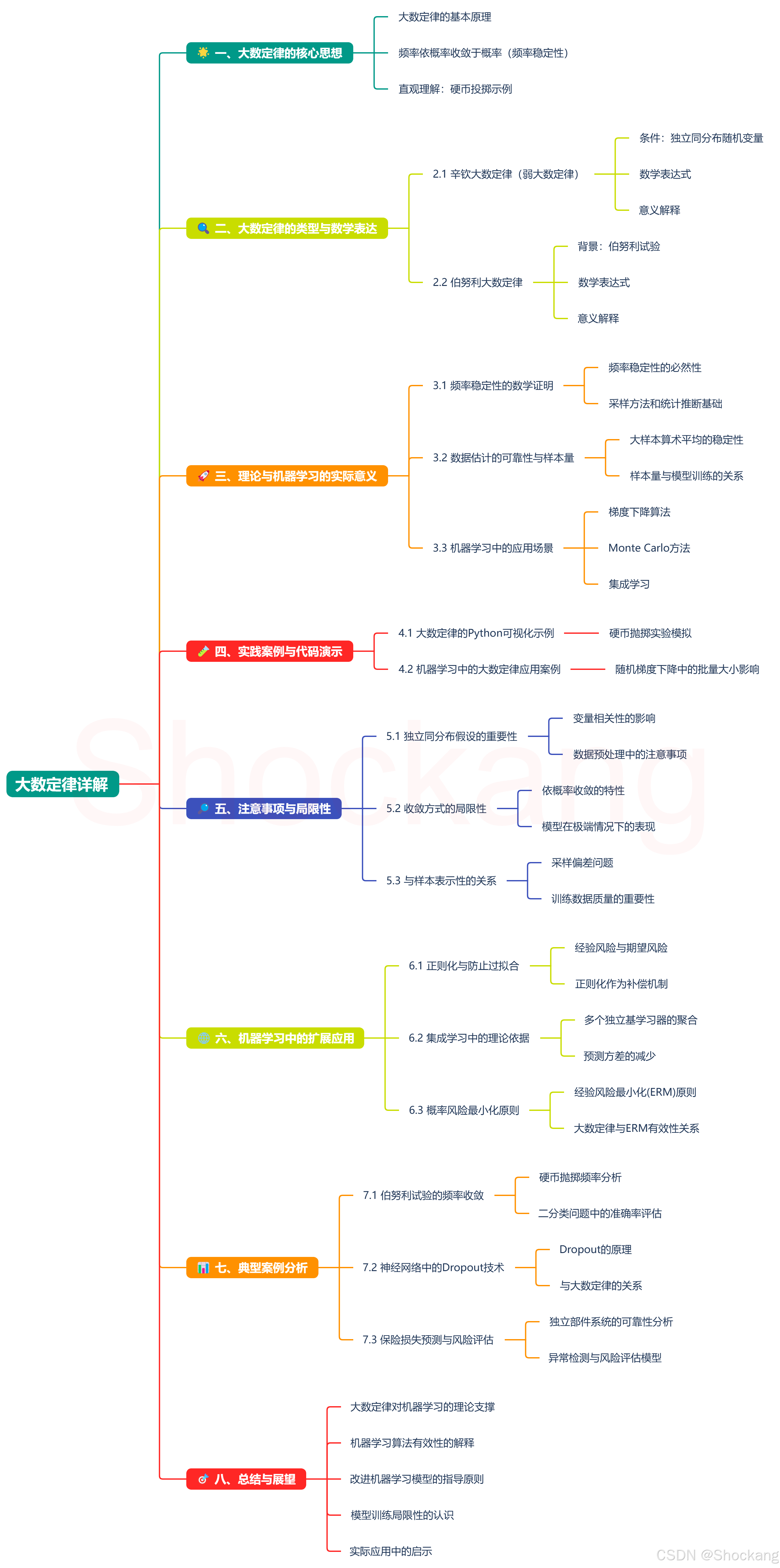
大数定律详解
前言 本文隶属于专栏《机器学习数学通关指南》,该专栏为笔者原创,引用请注明来源,不足和错误之处请在评论区帮忙指出,谢谢! 本专栏目录结构和参考文献请见《机器学习数学通关指南》 正文 🌟 一、大数定律的…...

2025生物科技革命:AI驱动的基因编辑与合成生物学新纪元
一、基因编辑技术的精准化突破 第三代基因编辑工具CRISPR-Cas12f的研发成功,将编辑精度提升至0.1碱基对级别。中国科学院团队利用该技术在灵长类动物模型中修复遗传性视网膜病变基因,治愈率达到92%。对比传统CRISPR-Cas9技术,新型编辑器脱靶…...

百度SEO关键词布局从堆砌到场景化的转型指南
百度SEO关键词布局:从“堆砌”到“场景化”的转型指南 引言 在搜索引擎优化(SEO)领域,关键词布局一直是核心策略之一。然而,随着搜索引擎算法的不断升级和用户需求的多样化,传统的“关键词堆砌”策略已经…...

macOS常用网络管理配置命令
目录 **1. ifconfig:查看和配置网络接口****2. networksetup:管理系统网络配置****3. ping:测试网络连通性****4. traceroute:跟踪数据包路径****5. nslookup/dig:DNS 查询****6. netstat:查看网络连接和统…...

Selenium 中 ActionChains 支持的鼠标和键盘操作设置及最佳实践
Selenium 中 ActionChains 支持的鼠标和键盘操作设置及最佳实践 一、引言 在使用 Selenium 进行自动化测试时,ActionChains 类提供了强大的功能,用于模拟鼠标和键盘的各种操作。通过 ActionChains,可以实现复杂的用户交互,如鼠标…...

【五.LangChain技术与应用】【31.LangChain ReAct Agent:反应式智能代理的实现】
一、ReAct Agent是啥?为什么说它比「普通AI」聪明? 想象一下,你让ChatGPT查快递物流,它可能直接编个假单号糊弄你。但换成ReAct Agent,它会先推理(Reasoning)需要调用哪个接口,再行动(Action)查询真实数据——这就是ReAct的核心:让AI学会「动脑子」再动手。 举个真…...

【HarmonyOS Next之旅】基于ArkTS开发(三) -> 兼容JS的类Web开发(七) -> JS动画(二)
目录 1 -> 动画动效 1.1 -> 创建动画对象 1.2 -> 添加动画事件和调用接口 2 -> 动画帧 2.1 -> 请求动画帧 2.2 -> 取消动画帧 1 -> 动画动效 通过设置插值器来实现动画效果。 说明 从API Version 6 开始支持。 1.1 -> 创建动画对象 通过cre…...

SpaCy处理NLP的详细工作原理及工作原理框图
spaCy处理NLP的详细工作原理及工作原理框图 spaCy处理NLP的详细工作原理 spaCy是一个基于Python的开源自然语言处理(NLP)库,它提供了一系列高效且易用的工具,用于执行各种NLP任务,如文本预处理、文本解析、命名实体识…...

Mysql中的常用函数
1、datediff(date1,date2) date1减去date2,返回两个日期之间的天数。 SELECT DATEDIFF(2008-11-30,2008-11-29) AS DiffDate -- 返回1 SELECT DATEDIFF(2008-11-29,2008-11-30) AS DiffDate -- 返回-1 2、char_length(s) 返回字符串 s 的字符数 3、round(x,d)…...

Linux下find命令的使用方法详解
文章目录 **一、基本语法****二、常用搜索条件****1. 按名称搜索****2. 按类型搜索****3. 按时间搜索****4. 按大小搜索****5. 按权限/所有者搜索** **三、组合条件(逻辑运算符)****四、执行操作****1. 直接输出(默认)****2. 删除…...
--IO流(三))
Day(19)--IO流(三)
文件加密 ps:^异或: 两边相同就是false 两边不同就是true 如果比较的是数字,那就会把它转换成为二进制,从右自左依次比较 总结:如果一个数字被异或两次,结果还是原来的数字 缓冲流 字节缓冲流 BufferedInputStream------字节缓冲输入流 BufferedOutputStream----字节…...

数据类型——long long
在C语言中,long long 类型是一种有符号的64位整数,其取值范围由二进制补码表示法决定。以下是具体数值及解释: 1. long long 的最大值 最大值(正数):9223372036854775807 计算方式:2^63 - 1 这是…...

浏览器扩展实现AI提示词高效管理:从模板变量到工作流优化
1. 项目概述与核心价值最近在折腾AI工具链,发现一个痛点:每次和ChatGPT、Claude或者本地部署的大模型对话时,那些精心调试好的提示词(Prompt)总是散落在各个聊天窗口里,要么就是得手动复制粘贴,…...

Odrive 0.5.5 固件启动流程详解:从USB初始化到电机线程就绪,新手避坑指南
ODrive 0.5.5 固件启动全流程拆解:从硬件初始化到电机控制线程就绪 当一块崭新的ODrive开发板首次通电时,固件究竟在后台执行了哪些精密操作?本文将深入RTOS内核,以时间轴方式还原从rtos_main入口到双轴电机线程就绪的完整启动过程…...

SingleFile CLI架构解析:高性能网页批量保存解决方案与实战指南
SingleFile CLI架构解析:高性能网页批量保存解决方案与实战指南 【免费下载链接】SingleFile Web Extension for saving a faithful copy of a complete web page in a single HTML file 项目地址: https://gitcode.com/gh_mirrors/si/SingleFile SingleFile…...
)
Win11任务栏小喇叭失踪?别慌!3个亲测有效的修复方法(含重启资源管理器与音频服务)
Win11任务栏音量图标消失?3种专业修复方案与深度解析 刚升级Win11的用户常会遇到一个令人抓狂的小问题——任务栏右下角的音量图标突然"离家出走"。这个看似微不足道的小喇叭,却是我们日常调节系统音量的主要入口。当它消失时,不仅…...

终极英雄联盟换肤工具:R3nzSkin国服特供版完整使用教程
终极英雄联盟换肤工具:R3nzSkin国服特供版完整使用教程 【免费下载链接】R3nzSkin-For-China-Server Skin changer for League of Legends (LOL) 项目地址: https://gitcode.com/gh_mirrors/r3/R3nzSkin-For-China-Server 想要在英雄联盟国服免费体验所有皮肤…...
)
用两个三极管+稳压管,手把手教你搭一个简易5V LDO(附原理图、PCB与实测避坑)
用两个三极管稳压管搭建简易5V LDO:从原理图到实测的完整避坑指南 在电子设计领域,线性稳压器(LDO)是电源管理的基础模块。虽然市面上有大量成熟的LDO芯片,但用分立元件搭建一个简易LDO仍然是理解电源原理的绝佳实践。本文将带你用最常见的SS…...

从0到1搭建AI心理健康预警系统:我是如何用BERT+BiLSTM捕捉情绪拐点的
一、 痛点:为什么通用大模型干不了这活?首先声明,我们不是大模型黑。但在心理预警这个场景下,直接用GPT-4或者文心一言的API,有三个致命伤:成本炸裂: 每天几万条的学生/员工咨询日志ÿ…...

使用curl命令快速测试Taotoken大模型接口连通性与功能
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用curl命令快速测试Taotoken大模型接口连通性与功能 在接入大模型服务时,直接使用HTTP请求进行测试是一种高效且通用…...

如何实现抖音弹幕实时抓取:基于系统代理的技术突破指南
如何实现抖音弹幕实时抓取:基于系统代理的技术突破指南 【免费下载链接】DouyinBarrageGrab 基于系统代理的抖音弹幕wss抓取程序,能够获取所有数据来源,包括chrome,抖音直播伴侣等,可进行进程过滤 项目地址: https:/…...

2026 电子招投标全流程操作指南:环境搭建→签章→上传→解密全避坑
据安华招标 2025 年度电子招投标技术白皮书显示,全国公共资源交易平台电子标覆盖率已达98.7%,但因纯技术操作失误导致的废标率仍高达22%。其中环境配置错误、签章失效、解密失败三大问题,占所有技术类废标的85% 以上。很多企业投入数月打磨标…...