STM32---FreeRTOS消息队列
一、简介
1、队列简介:
队列:是任务到任务,任务到中断、中断到任务数据交流的一种机制(消息传递)。
 FreeRTOS基于队列,实现了多种功能,其中包括队列集、互斥信号量、计数型信号量、二值信号量、递归互斥信号量,因此很有必要深入了解FreeRTOS的队列。
FreeRTOS基于队列,实现了多种功能,其中包括队列集、互斥信号量、计数型信号量、二值信号量、递归互斥信号量,因此很有必要深入了解FreeRTOS的队列。
(中断一关闭,就不会出现任务切换,以防多个任务同时操作队列) 
2、FreeRTOS队列特点:
1.数据入队出队方式:先进先出
2.数据传递方式:实际值
3.多任务访问
4. 出队、入队堵塞


问题:当多个任务写入消息给一个“满队列”时,这些任务都会进入阻塞状态,也就是说有多个任务 在等待同一 个队列的空间。那当队列中有空间时,哪个任务会进入就绪态?
答: 1、优先级最高的任务 2、如果大家的优先级相同,那等待时间最久的任务会进入就绪态
注:我始终认为自己不是一个很聪明的人,所以这些理论知识,我都是浅尝辄止,量力而行。
3、往队列写入消息API函数 :
 4、从队列读取消息API函数:
4、从队列读取消息API函数:
 二、实验
二、实验
1、实验步骤

2、代码:
main.c
#include "stm32f10x.h"
#include "FreeRTOS.h"
#include "task.h"
#include "freertos_demo.h"
#include "Delay.h"
#include "sys.h"
#include "usart.h"
#include "LED.h"
#include "Key.h"int main(void){ NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组 4 uart_init(115200); delay_init();Key_Init();LED_Init();// 创建任务FrrrRTOS_Demo();}freertos_demo.c
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "LED.h"
#include "Key.h"
#include "usart.h"
#include "delay.h"/******************************************************************任务配置****************************************************/
//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_TASK_STACK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);//任务优先级
#define TASK1_PRIO 2
//任务堆栈大小
#define TASK1_STACK_SIZE 128
//任务句柄
TaskHandle_t Task1_Handler;
//任务函数
void task1(void *pvParameters);//任务优先级
#define TASK2_PRIO 3
//任务堆栈大小
#define TASK2_STACK_SIZE 128
//任务句柄
TaskHandle_t Task2_Handler;
//任务函数
void task2(void *pvParameters);//任务优先级
#define TASK3_PRIO 4
//任务堆栈大小
#define TASK3_STACK_SIZE 128
//任务句柄
TaskHandle_t Task3_Handler;
//任务函数
void task3(void *pvParameters);char task_buffer[500]; //用于存储系统中任务信息表格/******************************************************************任务函数****************************************************/
QueueHandle_t key_queue; //小数据句柄
QueueHandle_t big_data_queue; //大数据 句柄
char buff[100] = {"苍天已死,黄天当立;岁在甲子,天下大吉"};
void FrrrRTOS_Demo(void)
{key_queue = xQueueCreate(2, sizeof(uint8_t));if(key_queue != NULL){printf("\r\nkey_queue队列创建成功!!!\r\n");}else{ printf("key_queue队列创建失败!!!\r\n"); }big_data_queue = xQueueCreate(1, sizeof(char *));if(big_data_queue != NULL){printf("big_data_queue队列创建成功!!!\r\n");}else{ printf("big_data_queue队列创建失败!!!\r\n"); }//创建开始任务xTaskCreate((TaskFunction_t )start_task, //任务函数( char* )"start_task", //任务名称(uint16_t )START_TASK_STACK_SIZE, //任务堆栈大小(void* )NULL, //传递给任务函数的参数(UBaseType_t )START_TASK_PRIO, //任务优先级(TaskHandle_t* )&StartTask_Handler); //任务句柄 // 启动任务调度vTaskStartScheduler();}void start_task(void *pvParameters)
{taskENTER_CRITICAL(); //进入临界区//创建1任务xTaskCreate((TaskFunction_t )task1, (const char* )"task1", (uint16_t )TASK1_STACK_SIZE, (void* )NULL, (UBaseType_t )TASK1_PRIO, (TaskHandle_t* )&Task1_Handler); //创建2任务xTaskCreate((TaskFunction_t )task2, (const char* )"task2", (uint16_t )TASK2_STACK_SIZE, (void* )NULL,(UBaseType_t )TASK2_PRIO,(TaskHandle_t* )&Task2_Handler); //创建3任务xTaskCreate((TaskFunction_t )task3, (const char* )"task3", (uint16_t )TASK3_STACK_SIZE, (void* )NULL,(UBaseType_t )TASK3_PRIO,(TaskHandle_t* )&Task3_Handler); vTaskDelete(NULL); //删除开始任务taskEXIT_CRITICAL(); //退出临界区
}//1 任务函数
void task1(void *pvParameters)
{uint8_t key = 0;BaseType_t err;char *buf;buf = &buff[0];while(1){key = Key_GetNum();if(key == 1 || key == 2){err = xQueueSend( key_queue, &key, portMAX_DELAY );if(err != pdTRUE){printf("key_queue队列发送失败\r\n");}}else if(key == 3){err = xQueueSend( big_data_queue, &buf, portMAX_DELAY );if(err != pdTRUE){printf("key_queue队列发送失败\r\n");}}vTaskDelay(50);}
}// 任务2 小数据出队函数
void task2(void *pvParameters)
{uint8_t key = 0;BaseType_t err = 0;// 任务主循环while (1){err = xQueueReceive( key_queue,&key,portMAX_DELAY );if(err != pdTRUE){printf("key_queue队列读取失败\r\n"); }else{printf("key = %d\r\n",key);};}
}//不调用系统延时函数,因为xQueueReceive()函数如果读取完队列里面的数据,就会由就绪态转变为阻塞态;// 任务3 大数据出队函数
void task3(void *pvParameters)
{ char * buf;BaseType_t err = 0;// 任务主循环while (1){err = xQueueReceive( big_data_queue, &buf, portMAX_DELAY);if(err != pdTRUE){printf("big_data_queue队列读取失败\r\n"); }else{printf("key = %s\r\n",buf);};}
}
key.c
#include "stm32f10x.h" // Device header
#include "FreeRTOS.h"
#include "task.h"
#include "usart.h"
#include "Delay.h"/*** 函 数:按键初始化* 参 数:无* 返 回 值:无* 按键:PB4/PB12/PB14*/
void Key_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟/*GPIO初始化*/GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_12 | GPIO_Pin_14;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); }/*** 函 数:按键获取键码* 参 数:无* 返 回 值:按下按键的键码值,范围:0~3,返回0代表没有按键按下* 注意事项:此函数是阻塞式操作,当按键按住不放时,函数会卡住,直到按键松手*/
uint8_t Key_GetNum(void)
{uint8_t KeyNum = 0; //定义变量,默认键码值为0if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_4) == 0) //读PB4输入寄存器的状态,如果为0,则代表按键1按下{KeyNum= GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_4);printf("KeyNum = %d\r\n",KeyNum);delay_xms(20); //延时消抖while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_4) == 0); //等待按键松手delay_xms(20); //延时消抖KeyNum = 1; //置键码为1}if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_12) == 0) {KeyNum= GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_12);printf("KeyNum = %d\r\n",KeyNum);delay_xms(20); while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_12) == 0); delay_xms(20); KeyNum = 2; }if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14) == 0) {KeyNum= GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14);printf("KeyNum = %d\r\n",KeyNum);delay_xms(20); while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14) == 0); delay_xms(20); KeyNum = 3; }return KeyNum; //返回键码值,如果没有按键按下,所有if都不成立,则键码为默认值0
}3、实验结果解析
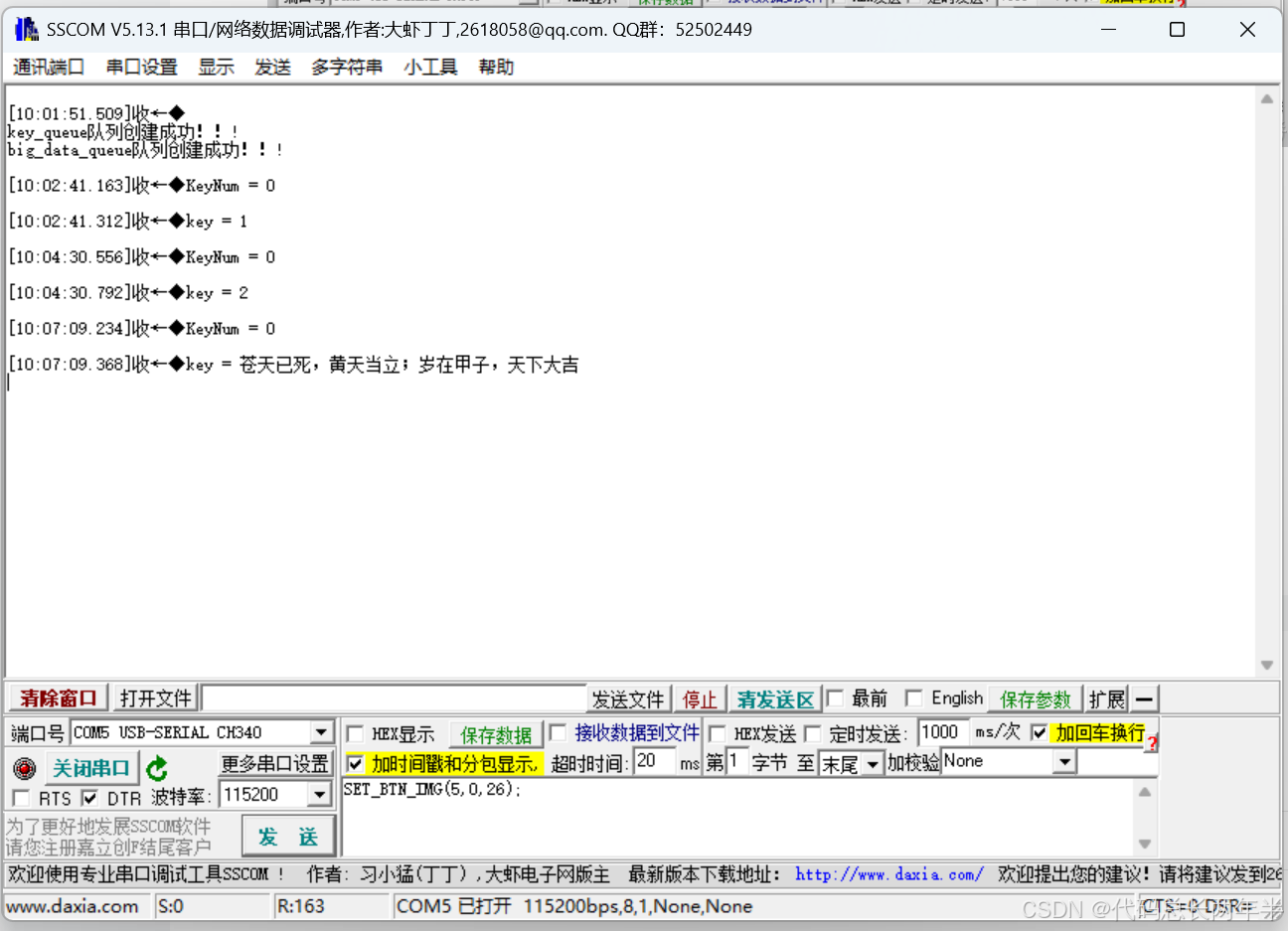
开始运行:

按下按键1(PB4):
按下按键1,就会往队列key_queue里面写入key值(1),然后任务切换到task2将队列key_queue里面的数据读取出来;;

按下按键2(PB12):
按下按键2,就会往队列key_queue里面写入key值(2),然后任务切换到task2将队列key_queue里面的数据读取出来;

按下按键3(PB14) :
按下按键2,就会往队列big_data_queue里面写入key值(3),然后任务切换到task3将队列big_data_queue里面的数据读取出来;
三、重点
使用队列相关函数时需要将下面宏置1(默认是1):
#define configSUPPORT_DYNAMIC_ALLOCATION 1
队列创建函数:
xQueueCreate( uxQueueLength, uxItemSize ) ; //uxQueueLength:队列长度;uxItemSize 队列参数的大小
队列写入消息函数:
xQueueSend( xQueue, pvItemToQueue, xTicksToWait ); //xQueue:待写入的队列;pvItemToQueue:待写入的消息;xTicksToWait:阻塞超时时间
队列读取消息函数:
xQueueReceive( QueueHandle_t xQueue,void * const pvBuffer,TickType_t xTicksToWait ) ; //xQueue:待读取的队列;pvBuffer:信息读取缓冲区;xTicksToWait:阻塞超时时间
问题:任务2(task2)和任务3(task3)没有系统延时函数(xTaskDelay()),按优先级来说应该一直执行任务3(task3),复位后却先执行了任务1(task1)?
答:因为xQueueReceive()和xQueueSend()函数,如果读取完或写入完队列里面的数据,自动会使任务由就绪态转变为阻塞态,知道队列里面有数据可以写入或者读出;
相关文章:
STM32---FreeRTOS消息队列
一、简介 1、队列简介: 队列:是任务到任务,任务到中断、中断到任务数据交流的一种机制(消息传递)。 FreeRTOS基于队列,实现了多种功能,其中包括队列集、互斥信号量、计数型信号量、二值信号量…...

开关模式电源转换器 EMI/EMC 的集成仿真
介绍 在电力电子领域,电磁干扰 (EMI) 和电磁兼容性 (EMC) 问题可以决定设计的成败。开关模式电源转换器虽然高效且紧凑,但却是电磁噪声的常见来源,可能会对附近的组件和系统造成严重破坏。随着…...
)
Java虚拟机之垃圾收集(一)
目录 一、如何判定对象“生死”? 1. 引用计数算法(理论参考) 2. 可达性分析算法(JVM 实际使用) 3. 对象的“缓刑”机制 二、引用类型与回收策略 三、何时触发垃圾回收? 1. 分代回收策略 2. 手动触发…...

linux---天气爬虫
代码概述 这段代码实现了一个天气查询系统,支持实时天气、未来天气和历史天气查询。用户可以通过终端菜单选择查询类型,并输入城市名称来获取相应的天气信息。程序通过 TCP 连接发送 HTTP 请求,并解析返回的 JSON 数据来展示天气信息。 #in…...

字节顺序(大小端序)
在弄明白字节顺序之前先了解一下一些基础概念. 基础概念 字节(byte): 字节是计算机中数据处理的基本单位,通常由8个位组成,即1字节等于8位。一个字节可以存储一个ASCII码,两个字节可以存放一个汉字国标…...

可复用的 Vue 轮播图组件
大家好,今天我想和大家分享一下如何开发一个通用的 Vue 轮播图组件。轮播图在各种网站中都很常见,无论是展示产品、活动还是文章,都能派上用场。我们今天要实现的这个组件会具备良好的可配置性和易用性,同时保证代码的可维护性。 …...

AI编程: 一个案例对比CPU和GPU在深度学习方面的性能差异
背景 字节跳动正式发布中国首个AI原生集成开发环境工具(AI IDE)——AI编程工具Trae国内版。 该工具模型搭载doubao-1.5-pro,支持切换满血版DeepSeek R1&V3, 可以帮助各阶段开发者与AI流畅协作,更快、更高质量地完…...

Linux红帽:RHCSA认证知识讲解(五)从红帽和 DNF 软件仓库下载、安装、更新和管理软件包
Linux红帽:RHCSA认证知识讲解(五)从红帽和 DNF 软件仓库下载、安装、更新和管理软件包 前言一、DNF 软件包管理基础1.1 核心操作命令安装软件包卸载软件包重新安装软件包 1.2 软件仓库原理 二、配置自定义软件仓库步骤 1:清理默认…...

云上特权凭证攻防启示录:从根账号AK泄露到安全体系升级的深度实践
事件全景:一场持续17分钟的云上攻防战 2025年3月9日15:39,阿里云ActionTrail日志突现异常波纹——根账号acs:ram::123456789:root(已脱敏)从立陶宛IP(164.92.91.227)发起高危操作。攻击者利用泄露的AccessKey(AK)在17分钟内完成侦察→提权→持久化攻击链,完整操作序列…...

从3b1b到课堂:教育3D化的理想与现实鸿沟
从3b1b到课堂:教育3D化的理想与现实鸿沟 3Blue1Brown(3b1b)凭借精妙的三维动画与直观的知识可视化,重新定义了数学教育的可能性。然而,当前教育实践中,3D技术的渗透仍显不足,多数课堂停留在平面…...

FPGA入门教程
引言 FPGA(Field-Programmable Gate Array,现场可编程门阵列)是一种灵活且强大的硬件设备,广泛应用于数字电路设计、信号处理、嵌入式系统等领域。与传统的ASIC(专用集成电路)不同,FPGA允许用户…...

Liunx系统 : 进程间通信【IPC-Shm共享内存】
文章目录 System V共享内存创建共享内存shmget 控制共享内存shmctl shm特性 System V System V是Liunx中的重要的进程间通信机制,它包括(shm)共享内存,(msg)消息队列和(sem)信号量。…...

KafkaRocketMQ
Kafka 消息生产与消费流程 1. 消息生产 生产者创建消息: 指定目标 Topic、Key(可选)、Value。可附加 Header 信息(如时间戳、自定义元数据)。 选择分区(Partition): 若指定 Key&am…...

HarmonyOS Next 中的状态管理
在声明式UI编程框架中,UI是程序状态的运行结果,用户构建了一个UI模型,其中应用的运行时的状态是参数。当参数改变时,UI作为返回结果,也将进行对应的改变。这些运行时的状态变化所带来的UI的重新渲染,在ArkU…...

基于qiime2的16S数据分析全流程:从导入数据到下游分析一条龙
目录 创建metadata 把数据导入qiime2 去除引物序列 双端合并 (dada2不需要) 质控 (dada2不需要) 使用deblur获得特征序列 使用dada2生成代表序列与特征表 物种鉴定 可视化物种鉴定结果 构建进化树(ITS一般不构建进化树…...
)
【软件测试开发】:软件测试常用函数1.0(C++)
1. 元素的定位 web⾃动化测试的操作核⼼是能够找到⻚⾯对应的元素,然后才能对元素进⾏具体的操作。 常⻅的元素定位⽅式⾮常多,如id,classname,tagname,xpath,cssSelector 常⽤的主要由cssSelector和xpath…...

vue2项目修改浏览器显示的网页图标
1.准备一个新的图标文件,通常是. ico格式,也可以是. Png、. Svg等格式 2.将新的图标文件(例如:faviconAt.png)放入项目的public文件夹中。如下图 public文件夹中的所有文件都会在构建时原样复制到最终的输出目录(通常是dist) 3. 修改vue项目…...

开源、创新与人才发展:机器人产业的战略布局与稚晖君成功案例解析
目录 引言 一、开源:机器人产业的战略布局 促进技术进步和生态建设 吸引人才和合作伙伴 建立标准和网络效应 降低研发风险与成本 二、稚晖君:华为"天才少年计划"的成功典范 深厚的技术积累与动手能力 强烈的探索和创新意识 持续公开…...

线程相关作业
1.创建两个线程,分支线程1拷贝文件的前一部分,分支线程2拷贝文件的后一部分 #include "head.h"#define BUFFER_SIZE 1024// 线程参数结构体,包含文件名和文件偏移量 typedef struct {FILE *src_file;FILE *dest_file;long start_o…...

通义万相2.1开源版本地化部署攻略,生成视频再填利器
2025 年 2 月 25 日晚上 11:00 通义万相 2.1 开源发布,前两周太忙没空搞它,这个周末,也来本地化部署一个,体验生成效果如何,总的来说,它在国内文生视频、图生视频的行列处于领先位置,…...

从Provisional headers are shown到证书过期:uniapp请求无响应的幕后真相
从Provisional headers are shown到证书过期:uniapp请求无响应的深度排查指南 当你正在调试一个运行良好的uniapp项目时,突然发现所有网络请求在真机上毫无征兆地停止工作——没有错误提示,没有响应数据,只有开发者工具中冷冰冰的…...

雀魂智能辅助:从零构建你的AI麻将教练系统
雀魂智能辅助:从零构建你的AI麻将教练系统 【免费下载链接】Akagi A helper client for Majsoul 项目地址: https://gitcode.com/gh_mirrors/ak/Akagi 想在雀魂对局中获得实时AI分析与策略指导?雀魂智能辅助系统通过深度学习技术,为玩…...

告别手动标注!用RexUniNLU零样本模型自动提取电商评论情感
告别手动标注!用RexUniNLU零样本模型自动提取电商评论情感 1. 电商评论分析的痛点与解决方案 电商平台每天产生海量用户评论,这些评论蕴含着宝贵的用户反馈和市场洞察。传统的情感分析方法通常面临两大难题: 标注成本高:需要大…...

终极指南:如何让Nautilus、Dolphin等Linux文件管理器拥有macOS Finder般流畅的快捷键体验
终极指南:如何让Nautilus、Dolphin等Linux文件管理器拥有macOS Finder般流畅的快捷键体验 【免费下载链接】kinto Mac-style shortcut keys for Linux & Windows. 项目地址: https://gitcode.com/gh_mirrors/kin/kinto 你是否厌倦了在Linux文件管理器中不…...

【无线通信】基于统计信道的低复杂度旋转和位置优化为6D可移动天线无线通信附Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。🍎 往期回顾关注个人主页:Matlab科研工作室👇 关注我领取海量matlab电子书和…...

软件测试员转型AI测试:机遇与挑战全解析
技术浪潮下的必然选择在人工智能技术席卷全球的浪潮中,软件测试领域正经历前所未有的变革。2026年数据显示,AI在测试行业的渗透率已超40%,新发AI测试岗位量同比增长543%,薪资溢价高达18%。这一趋势迫使测试从业者直面转型抉择&…...

新手必看:Carsim与Simulink联合仿真搭建AEB系统的5个关键步骤
从零搭建AEB系统:Carsim与Simulink联合仿真实战指南 在自动驾驶技术快速发展的今天,自动紧急制动系统(AEB)已成为车辆安全领域的重要研究方向。对于车辆工程专业的学生和自动驾驶初学者而言,掌握Carsim与Simulink的联合…...

RK3588开发板跑YOLOv5视频流demo,遇到Segmentation fault别慌!保姆级core文件生成与调试指南
RK3588开发板YOLOv5视频流推理崩溃排查:从Segmentation fault到精准调试全攻略 当你在RK3588开发板上满心期待地运行YOLOv5视频流推理demo时,屏幕上突然闪现的"Segmentation fault (core dumped)"就像一盆冷水浇灭了热情。这种崩溃提示信息量极…...

Antares LoRaWAN库深度解析:嵌入式LoRaWAN MAC层实现指南
1. Antares LoRaWAN 库深度技术解析:面向嵌入式工程师的 LoRaWAN MAC 层实现指南 1.1 库定位与工程价值 Antares LoRaWAN 是一个专为 Arduino 生态设计的轻量级 LoRaWAN MAC 层实现库,其核心价值不在于功能堆砌,而在于 可理解性、可调试性与…...

第三章 Qt 编译及安装
1. Qt 编译安装 2 Qt 在线安装 在线安装包的下载地址: https://download.qt.io/official_releases/online_installers/ Qt对不同的平台提供了不同版本的安装包,可根据实际情况自行下载安装,本文档使用qt-online-installer-windows-x64-on…...